
Soft Conductive Textile Sensors: Characterization Methodology and Behavioral Analysis



Abstract

1. Introduction
2. Materials and Methods
2.1. Sensor Specifications for Vasculature Physical Simulator
- Stability: Sensor readings should be stable when stretched at a fixed strain.
- Appropriate working range: The sensor operating range should match the simulator working conditions, i.e., stretching range.
- Sensor–soft structure compatibility: When integrated into soft materials, the sensor features (dimensions, thickness, and softness) have to be compatible with its mechanical properties.
- Durability: Sensor performance should not degrade when stretched multiple times and over time.
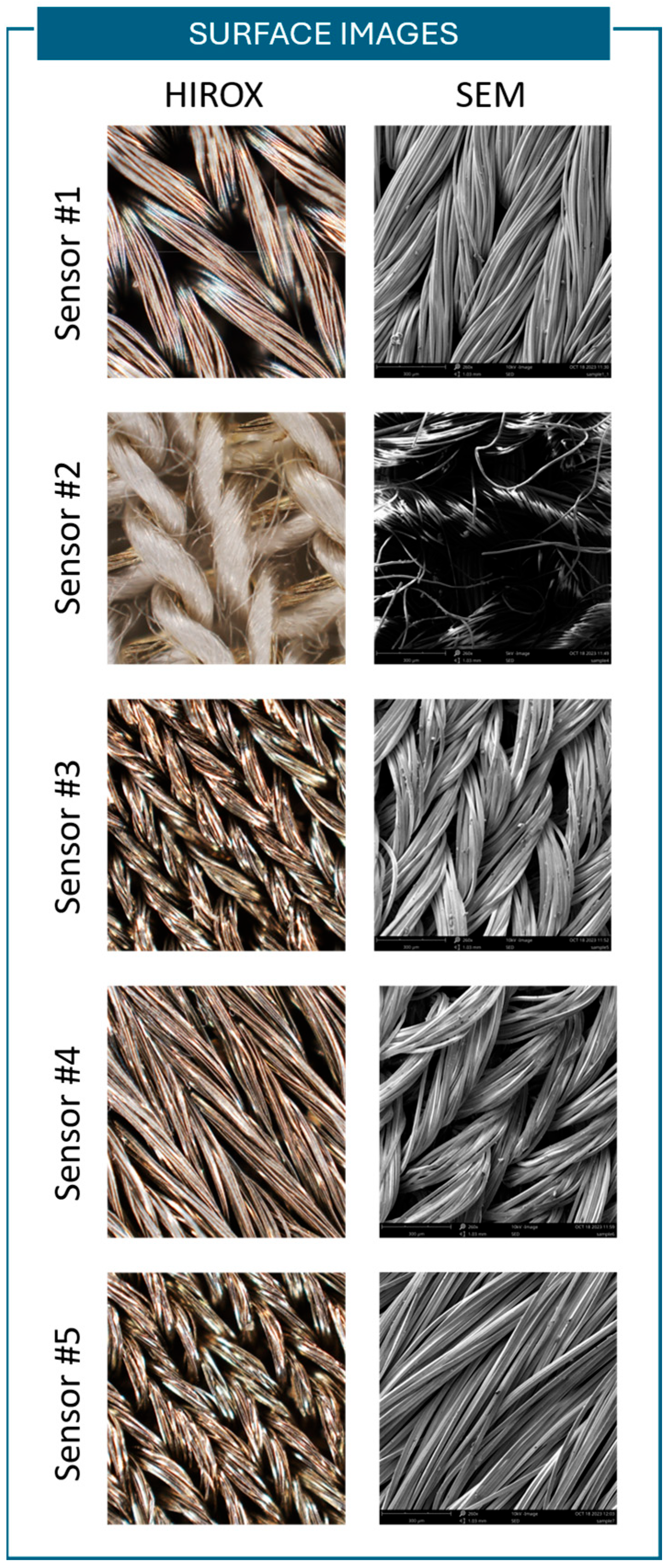
2.2. Fabrics Used for Sensor Design and Development
2.3. Sensors’ Fabrication
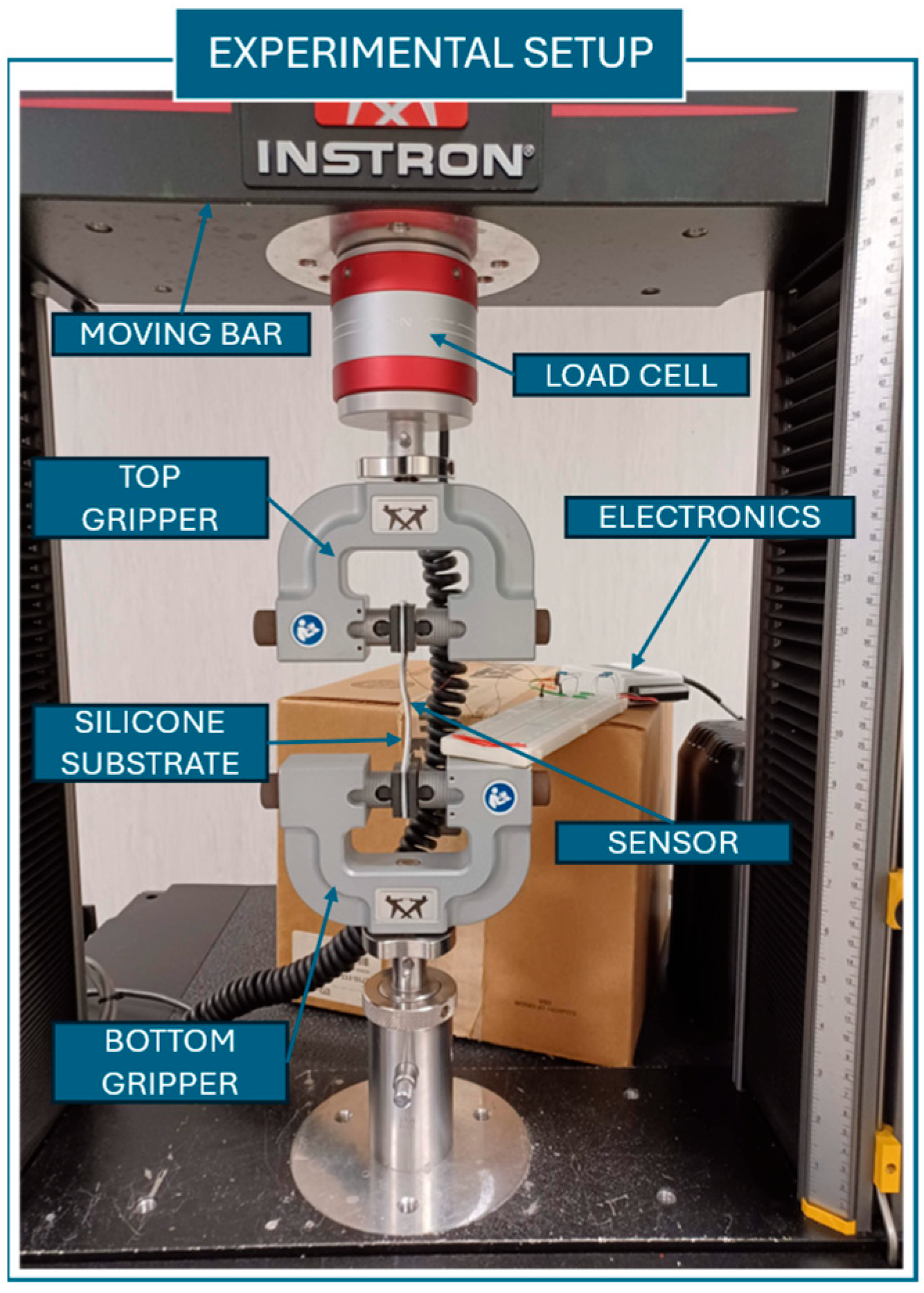
2.4. Electronics and Software

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fabric # | Name | Company | Composition | Fiber Dimension—Width (*) |
|---|---|---|---|---|
| 1 | Stretch Conductive Fabrics [35] | Less EMF (Latham, NY, USA) | Silver-plated, 76% Nylon, 24% Elastic fabric | 12.7 µm |
| 2 | Silverell Fabrics [36] | Less EMF (USA) | 16% Silver–Nylon, 84% Rayon | --- |
| 3 | Technik-tex P130+B [37] | Shieldex (Bremen, Germany) | 78% Polyamide, 22% Elastomer | 17.3 µm |
| 4 | Technik-tex P180+B [38] | Shieldex (Germany) | 94% Polyamide, 6% Dorlastan | 18.2 µm |
| 5 | Med-tex P130 [39] | Shieldex (Germany) | 78% Polyamide, 22% Elastomer | 20.3 µm |
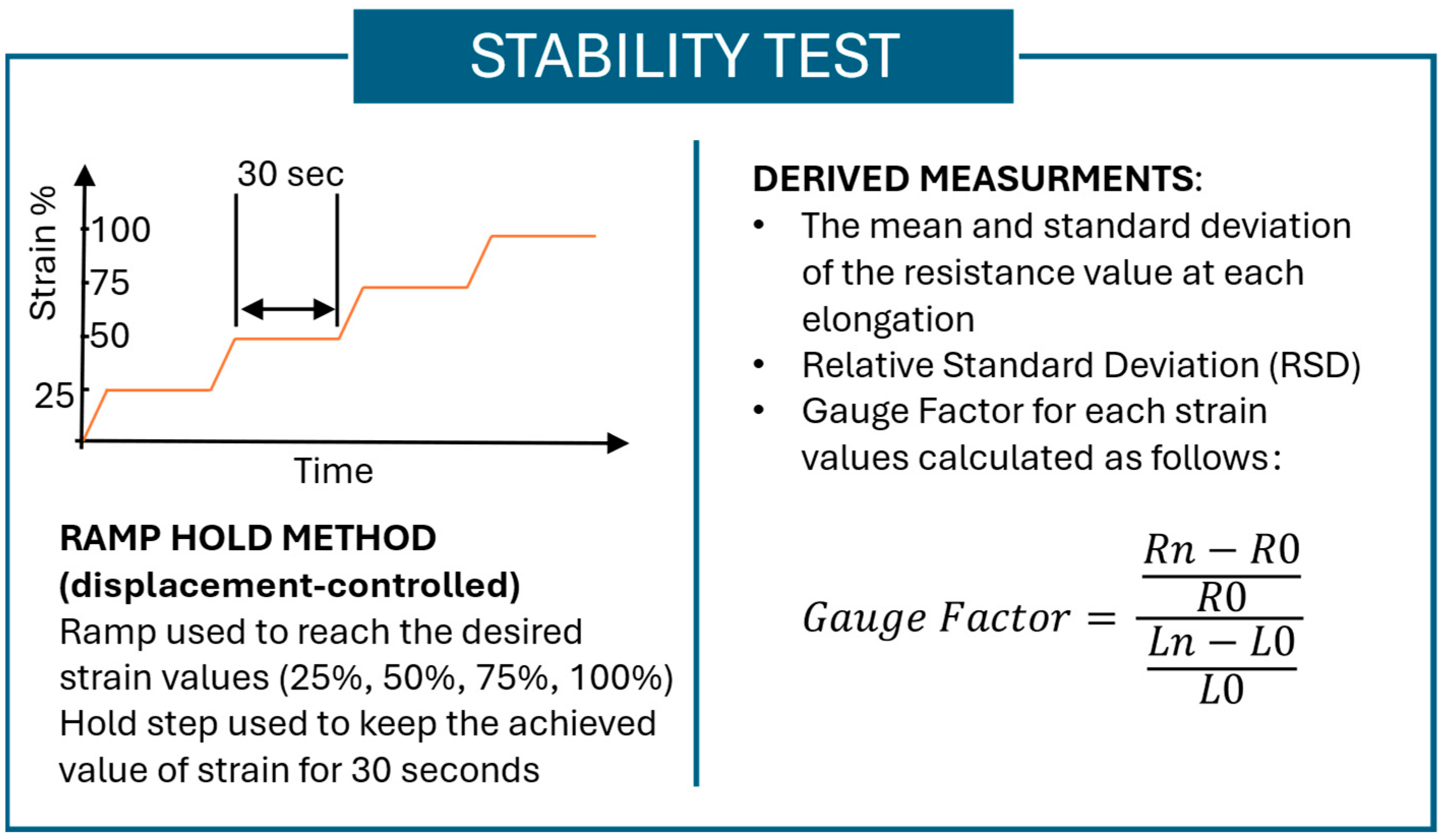
2.5. Characterization Methodology: Tests Performed and Properties Measured
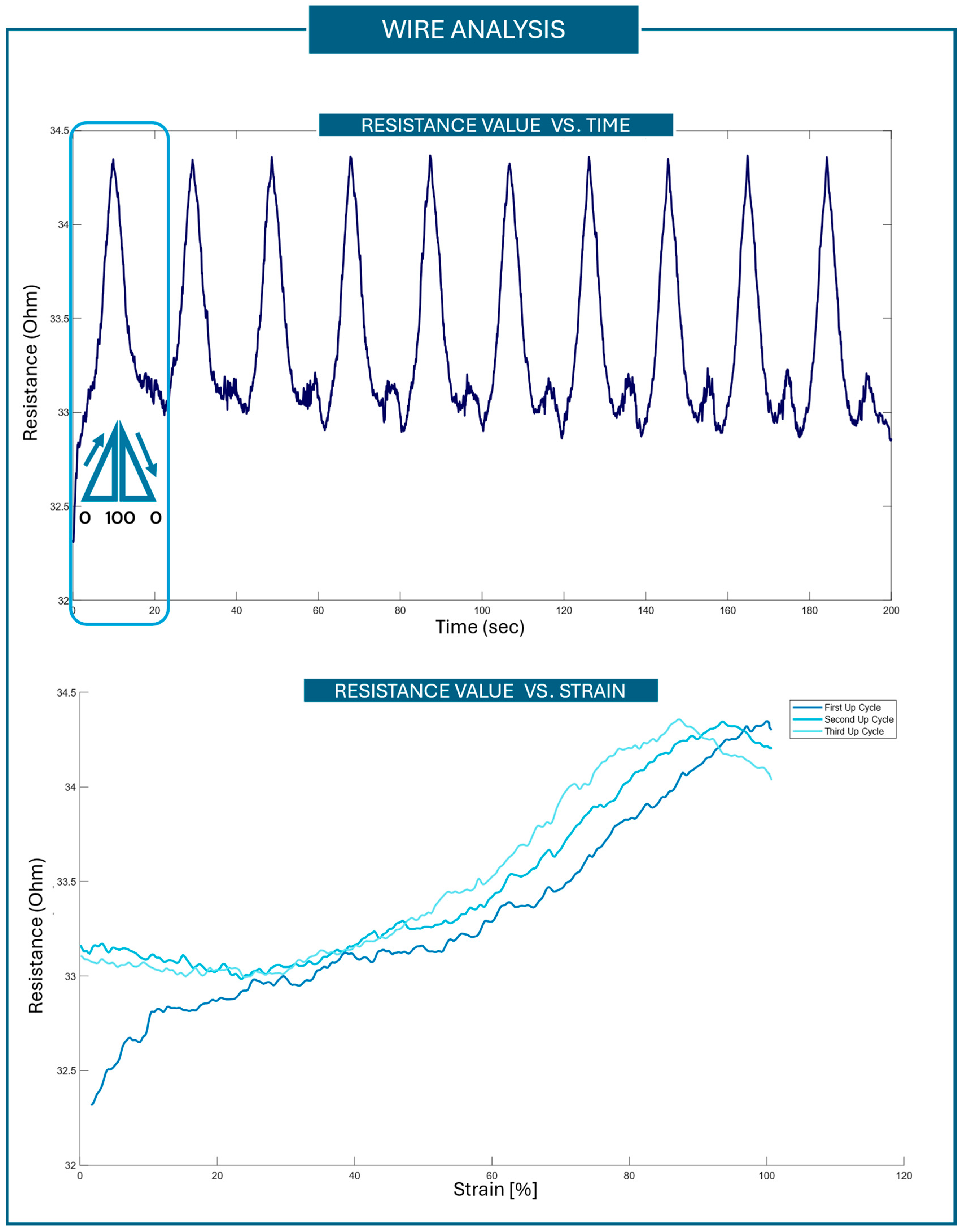
- The mean and standard deviation of the resistance value at each elongation.
- The gauge factor (GF), i.e., the relative change in resistance divided by the relative change in length (i.e., the definition of strain). The GF is calculated using (1)
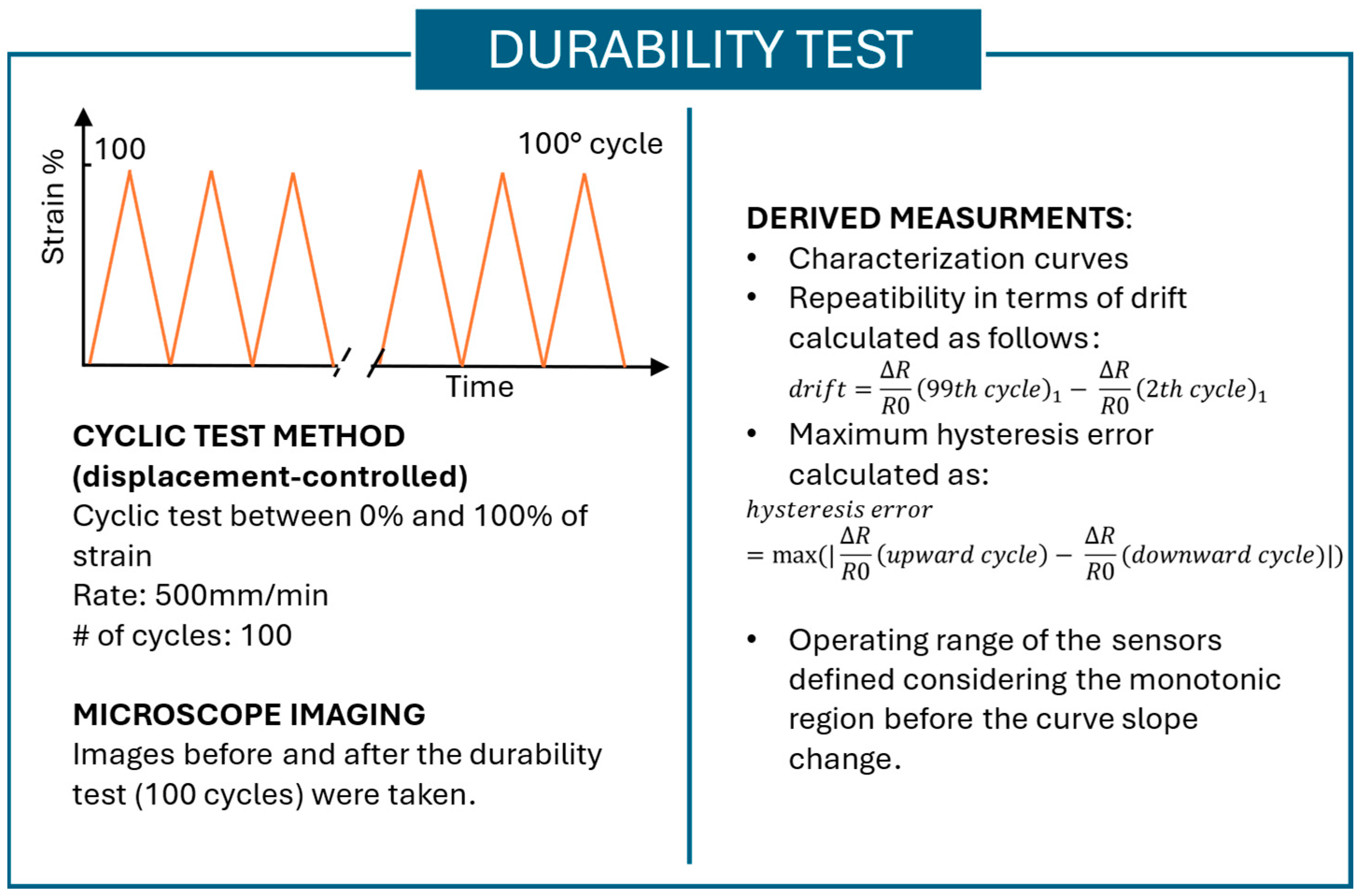
- The characterization curve was plotted at different numbers of cycles, such as 1st cycle, 9th cycle, 19th cycle, 29th cycle, and 99th cycle. The choice of considering different cycles is due to the analysis of the behavioral change when the sensor is subjected to fatigue. For each cycle, both the upward—from 0% to 100% of strain—and downward—from 100% to 0% of strain—curves were plotted. These curves were used to evaluate the repeatability, hysteresis, and operating range of the sensors. From the characterization curve, the calibration equation of each sensor can be derived.
- Repeatability is evaluated considering the drift of the sensor. The drift is a feature of the sensor determined by repeating cycles. It describes an unwanted shift in the sensor output when the input does not change. Instead of occurring suddenly, this variation is usually noticed over long periods of time and might be attributed to age, environmental variables, or the intrinsic properties of the sensor materials [40]. In accordance with the literature, in this work, the difference between the first point of both the 2nd and the 99th cycles was taken as an indicator of drift and thus of repeatability, as in [26,27].
- The hysteresis of a sensor is defined as the difference between the resistance at a given strain in the loading cycle and the resistance at the same strain in the unloading cycle for each strain value. The hysteresis error of a sensor is defined as the difference in the output at any measurement value within the sensor’s specified range, observed when the measurement point is approached first by increasing the strain and then by decreasing the strain. The maximum hysteresis error was calculated both for the 1st and the 99th cycles to evaluate the influence of fatigue on the hysteresis behavior of the sensor.
- The operating range is evaluated considering the characteristic curve of each sensor. The calibration curve obtained for each sensor was used to identify the working range of the sensors. The operating range was stated considering the region in which the sensor is monotonic.
3. Results
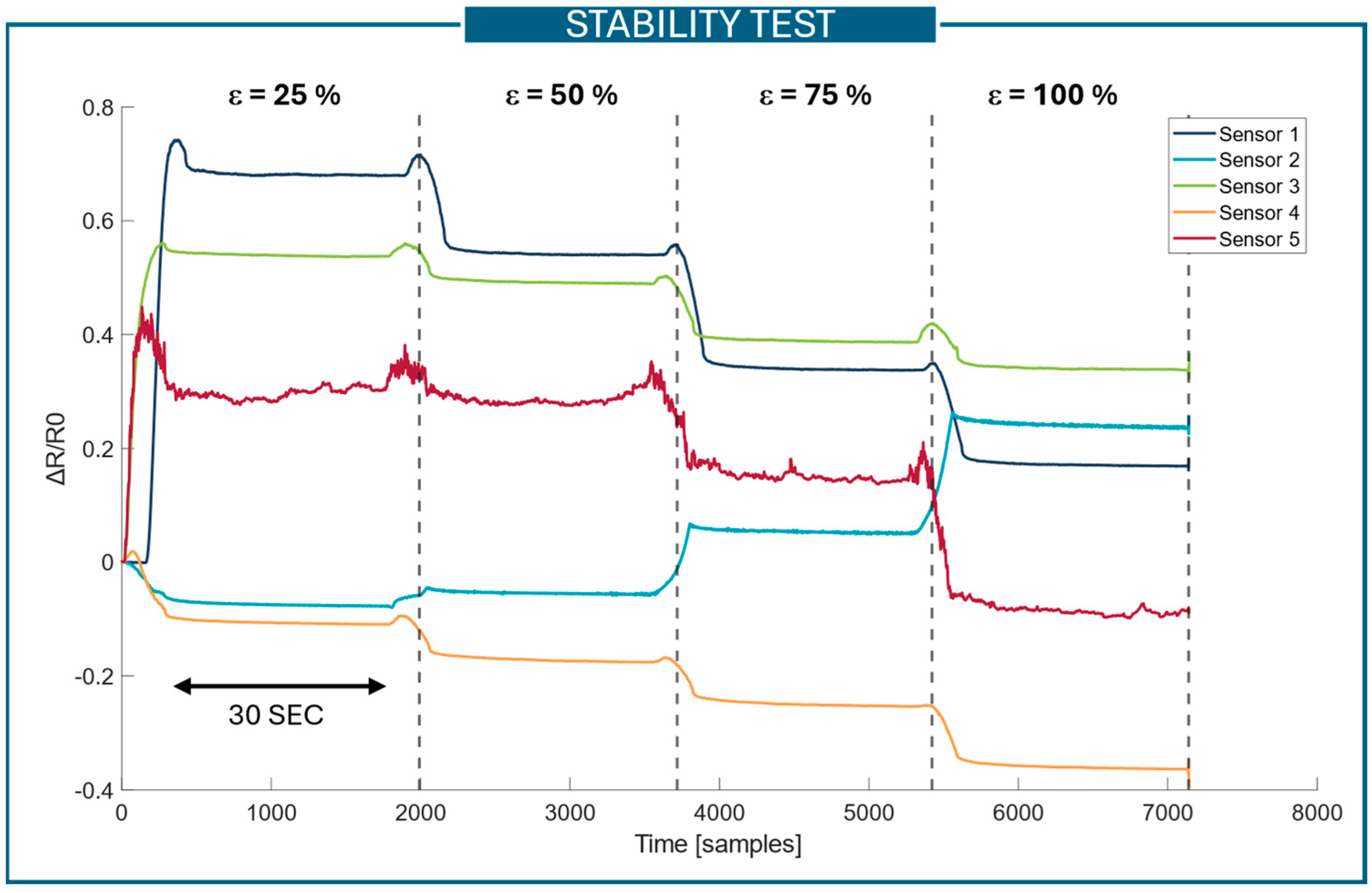
3.1. Stability Test
- Sensor#1 and sensors #2 and #4;
- Sensor #2 and sensor #3;
- Sensor #3 and sensor #4.
- Sensor #1 and sensor #4;
- Sensor #3 and sensors #4 and #5.
- Sensor #1 and sensors #3 and #4;
- Sensor #2 and sensors #4 and #5;
- Sensor #3 and sensors #4 and #5.
3.2. Durability Test
- Sensor #1 and sensors #4 and #5;
- Sensor #3 and sensor #4.
4. Discussion

5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

| Means and Standard Deviations in the Stability Test | |||||
|---|---|---|---|---|---|
| 25% of strain | |||||
| Sensor #1 | Sensor #2 | Sensor #3 | Sensor #4 | Sensor #5 | |
| Sample 1 | 0.68 ± 0.01 | −0.074 ± 0.002 | 0.540 ± 0.002 | −0.106 ± 0.003 | 0.30 ± 0.01 |
| Sample 2 | 0.716 ± 0.003 | −0.082 ± 0.002 | 0.434 ± 0.002 | −0.114 ± 0.002 | 0.003 ± 0.013 |
| Sample 3 | 0.186 ± 0.002 | 0.036 ± 0.002 | 0.491 ± 0.002 | −0.128 ± 0.005 | 0.174 ± 0.009 |
| 50% of strain | |||||
| Sensor #1 | Sensor #2 | Sensor #3 | Sensor #4 | Sensor #5 | |
| Sample 1 | 0.55 ± 0.02 | −0.054 ± 0.002 | 0.493 ± 0.003 | −0.171 ± 0.004 | 0.29 ± 0.01 |
| Sample 2 | 0.575 ± 0.003 | −0.022 ± 0.003 | 0.438 ± 0.002 | −0.149 ± 0.003 | −0.10 ± 0.06 |
| Sample 3 | 0.075 ± 0.001 | 0.027 ± 0.005 | 0.506 ± 0.002 | −0.175 ± 0.01 | 0.05 ± 0.01 |
| 75% of strain | |||||
| Sensor #1 | Sensor #2 | Sensor #3 | Sensor #4 | Sensor #5 | |
| Sample 1 | 0.342 ± 0.008 | 0.054 ± 0.003 | 0.389 ± 0.003 | −0.250 ± 0.004 | 0.15 ± 0.01 |
| Sample 2 | 0.34 ± 0.01 | 0.086 ± 0.015 | 0.402 ± 0.003 | −0.202 ± 0.004 | −0.24 ± 0.04 |
| Sample 3 | −0.058 ± 0.002 | 0.17 ± 0.02 | 0.503 ± 0.005 | −0.242 ± 0.004 | −0.161 ± 0.007 |
| 100% of strain | |||||
| Sensor #1 | Sensor #2 | Sensor #3 | Sensor #4 | Sensor #5 | |
| Sample 1 | 0.172 ± 0.003 | 0.241 ± 0.003 | 0.340 ± 0.002 | −0.360 ± 0.004 | −0.086 ± 0.007 |
| Sample 2 | 0.169 ± 0.002 | 0.290 ± 0.003 | 0.348 ± 0.002 | −0.305 ± 0.004 | −0.274 ± 0.001 |
| Sample 3 | −0.1609 ± 0.0008 | 0.397 ± 0.004 | 0.463 ± 0.003 | −0.322 ± 0.009 | −0.361 ± 0.004 |
| Gauge Factor | |||||
|---|---|---|---|---|---|
| 25% of strain | |||||
| Sensor #1 | Sensor #2 | Sensor #3 | Sensor #4 | Sensor #5 | |
| Sample 1 | 2.74 | −0.30 | 2.16 | −0.42 | 1.19 |
| Sample 2 | 2.86 | −0.33 | 1.73 | −0.46 | 0.01 |
| Sample 3 | 0.74 | −0.14 | 1.96 | −0.51 | 0.70 |
| 50% of strain | |||||
| Sensor #1 | Sensor #2 | Sensor #3 | Sensor #4 | Sensor #5 | |
| Sample 1 | 1.09 | −0.11 | 0.99 | −0.34 | 0.57 |
| Sample 2 | 1.14 | −0.04 | 0.89 | −0.30 | −0.20 |
| Sample 3 | 0.15 | 0.05 | 1.01 | −0.35 | 0.10 |
| 75% of strain | |||||
| Sensor #1 | Sensor #2 | Sensor #3 | Sensor #4 | Sensor #5 | |
| Sample 1 | 0.46 | 0.07 | 0.52 | −0.33 | 0.20 |
| Sample 2 | 0.45 | 0.12 | 0.54 | −0.27 | −0.32 |
| Sample 3 | −0.08 | 0.23 | 0.67 | −0.32 | −0.21 |
| 100% of strain | |||||
| Sensor #1 | Sensor #2 | Sensor #3 | Sensor #4 | Sensor #5 | |
| Sample 1 | 0.17 | 0.24 | 0.34 | −0.36 | −0.09 |
| Sample 2 | 0.17 | 0.29 | 0.35 | −0.30 | −0.27 |
| Sample 3 | −0.16 | 0.40 | 0.46 | −0.32 | −0.36 |
References
- Interlink Electronics. Available online: https://www.interlinkelectronics.com/force-sensing-resistor (accessed on 11 October 2024).
- FlexiForce. Available online: https://www.tekscan.com/products-solutions/embedded-force-sensors (accessed on 11 October 2024).
- Luo, Y.; Abidian, M.R.; Ahn, J.-H.; Akinwande, D.; Andrews, A.M.; Antonietti, M.; Bao, Z.; Berggren, M.; Berkey, C.A.; Bettinger, C.J.; et al. Technology Roadmap for Flexible Sensors. ACS Nano 2023, 17, 5211–5295. [Google Scholar] [CrossRef] [PubMed]
- Luo, Y.; Wang, M.; Wan, C.; Cai, P.; Loh, X.J.; Chen, X. Devising Materials Manufacturing Toward Lab-to-Fab Translation of Flexible Electronics. Adv. Mater. 2020, 32, 2001903. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Pang, Y.; Han, X.; Yang, Y.; Ling, J.; Jian, M.; Zhang, Y.; Yang, Y.; Ren, T.-L. Graphene Textile Strain Sensor with Negative Resistance Variation for Human Motion Detection. ACS Nano 2018, 12, 9134–9141. [Google Scholar] [CrossRef] [PubMed]
- Di, J.; Yao, S.; Ye, Y.; Cui, Z.; Yu, J.; Ghosh, T.K.; Zhu, Y.; Gu, Z. Stretch-Triggered Drug Delivery from Wearable Elastomer Films Containing Therapeutic Depots. ACS Nano 2015, 9, 9407–9415. [Google Scholar] [CrossRef] [PubMed]
- Frutiger, A.; Muth, J.T.; Vogt, D.M.; Mengüç, Y.; Campo, A.; Valentine, A.D.; Walsh, C.J.; Lewis, J.A. Capacitive Soft Strain Sensors via Multicore–Shell Fiber Printing. Adv. Mater. 2015, 27, 2440–2446. [Google Scholar] [CrossRef] [PubMed]
- Amjadi, M.; Turan, M.; Clementson, C.P.; Sitti, M. Parallel Microcracks-Based Ultrasensitive and Highly Stretchable Strain Sensors. ACS Appl. Mater. Interfaces 2016, 8, 5618–5626. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Zhang, Y.; Sun, X.; Liang, C.; Han, Y.; Wu, X.; Wang, Z. All Textile-Based Robust Pressure Sensors for Smart Garments. Chem. Eng. J. 2023, 454, 140302. [Google Scholar] [CrossRef]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically Innervated Soft Prosthetic Hand via Stretchable Optical Waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef] [PubMed]
- Byun, J.; Lee, Y.; Yoon, J.; Lee, B.; Oh, E.; Chung, S.; Lee, T.; Cho, K.-J.; Kim, J.; Hong, Y. Electronic Skins for Soft, Compact, Reversible Assembly of Wirelessly Activated Fully Soft Robots. Sci. Robot. 2018, 3, eaas9020. [Google Scholar] [CrossRef] [PubMed]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.M.; Wood, R.J.; Lewis, J.A. Soft Somatosensitive Actuators via Embedded 3D Printing. Adv. Mater. 2018, 30, 1706383. [Google Scholar] [CrossRef] [PubMed]
- Amjadi, M.; Pichitpajongkit, A.; Lee, S.; Ryu, S.; Park, I. Highly Stretchable and Sensitive Strain Sensor Based on Silver Nanowire–Elastomer Nanocomposite. ACS Nano 2014, 8, 5154–5163. [Google Scholar] [CrossRef] [PubMed]
- Choi, S.; Yoon, K.; Lee, S.; Lee, H.J.; Lee, J.; Kim, D.W.; Kim, M.; Lee, T.; Pang, C. Conductive Hierarchical Hairy Fibers for Highly Sensitive, Stretchable, and Water-Resistant Multimodal Gesture-Distinguishable Sensor, VR Applications. Adv. Funct. Mater. 2019, 29, 1905808. [Google Scholar] [CrossRef]
- Song, K.; Kim, S.H.; Jin, S.; Kim, S.; Lee, S.; Kim, J.-S.; Park, J.-M.; Cha, Y. Pneumatic Actuator and Flexible Piezoelectric Sensor for Soft Virtual Reality Glove System. Sci. Rep. 2019, 9, 8988. [Google Scholar] [CrossRef] [PubMed]
- Júnior, H.L.O.; Neves, R.M.; Monticeli, F.M.; Agnol, L.D. Smart Fabric Textiles: Recent Advances and Challenges. Textiles 2022, 2, 582–605. [Google Scholar] [CrossRef]
- Krifa, M. Electrically Conductive Textile Materials—Application in Flexible Sensors and Antennas. Textiles 2021, 1, 239–257. [Google Scholar] [CrossRef]
- Wang, J.P.; Xue, P.; Tao, X.M. Strain Sensing Behavior of Electrically Conductive Fibers under Large Deformation. Mater. Sci. Eng. A 2011, 528, 2863–2869. [Google Scholar] [CrossRef]
- Castano, L.M.; Flatau, A.B. Smart Fabric Sensors and E-Textile Technologies: A Review. Smart Mater. Struct. 2014, 23, 053001. [Google Scholar] [CrossRef]
- Huang, C.-T.; Shen, C.-L.; Tang, C.-F.; Chang, S.-H. A Wearable Yarn-Based Piezo-Resistive Sensor. Sens. Actuators A Phys. 2008, 141, 396–403. [Google Scholar] [CrossRef]
- Carnevale, A.; Massaroni, C.; Presti, D.L.; Formica, D.; Longo, U.G.; Schena, E.; Denaro, V. Wearable Stretchable Sensor Based on Conductive Textile Fabric for Shoulder Motion Monitoring. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020; IEEE: New York, NY, USA, 2020; pp. 106–110. [Google Scholar]
- Taji, B.; Shirmohammadi, S.; Groza, V.; Bolic, M. An ECG Monitoring System Using Conductive Fabric. In Proceedings of the 2013 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Gatineau, QC, Canada, 4–5 May 2013; IEEE: New York, NY, USA, 2013; pp. 309–314. [Google Scholar]
- Watson, A.; Sun, M.; Pendyal, S.; Zhou, G. TracKnee: Knee Angle Measurement Using Stretchable Conductive Fabric Sensors. Smart Health 2020, 15, 100092. [Google Scholar] [CrossRef]
- Maglio, S.; Park, C.; Tognarelli, S.; Menciassi, A.; Roche, E.T. High-Fidelity Physical Organ Simulators: From Artificial to Bio-Hybrid Solutions. IEEE Trans. Med. Robot. Bionics 2021, 3, 349–361. [Google Scholar] [CrossRef]
- Teyeme, Y.; Malengier, B.; Tesfaye, T.; Van Langenhove, L. A Fabric-Based Textile Stretch Sensor for Optimized Measurement of Strain in Clothing. Sensors 2020, 20, 7323. [Google Scholar] [CrossRef] [PubMed]
- Tangsirinaruenart, O.; Stylios, G. A Novel Textile Stitch-Based Strain Sensor for Wearable End Users. Materials 2019, 12, 1469. [Google Scholar] [CrossRef] [PubMed]
- al Rumon, M.A.; Cay, G.; Ravichandran, V.; Altekreeti, A.; Gitelson-Kahn, A.; Constant, N.; Solanki, D.; Mankodiya, K. Textile Knitted Stretch Sensors for Wearable Health Monitoring: Design and Performance Evaluation. Biosensors 2022, 13, 34. [Google Scholar] [CrossRef] [PubMed]
- Hong, D.; Kim, H.; Kim, T.; Kim, Y.-H.; Kim, N. Development of Patient Specific, Realistic, and Reusable Video Assisted Thoracoscopic Surgery Simulator Using 3D Printing and Pediatric Computed Tomography Images. Sci. Rep. 2021, 11, 6191. [Google Scholar] [CrossRef] [PubMed]
- Servi, M.; Piccolo, R.L.; Mura, F.D.; Mencarelli, M.; Puggelli, L.; Facchini, F.; Severi, E.; Martin, A.; Volpe, Y. Advanced Physical Simulator for Pediatric Minimally Invasive Thoracoscopy Training in the Treatment of Pulmonary Sequestration. Comput. Biol. Med. 2025, 188, 109847. [Google Scholar] [CrossRef] [PubMed]
- Rabazzi, G.; Castaldi, A.; Aprile, V.; Mastromarino, M.G.; Korasidis, S.; Condino, S.; Carbone, M.; Simi, F.; Ambrogi, M.C.; Cigna, E.; et al. Training in Minimally Invasive Thoracic Surgery on 3D-Model: Back to the Future of Education. J. Vis. Surg. 2025, 11, 15. [Google Scholar] [CrossRef]
- Sparks, J.L.; Vavalle, N.A.; Kasting, K.E.; Long, B.; Tanaka, M.L.; Sanger, P.A.; Schnell, K.; Conner-Kerr, T.A. Use of Silicone Materials to Simulate Tissue Biomechanics as Related to Deep Tissue Injury. Adv. Ski. Wound Care 2015, 28, 59–68. [Google Scholar] [CrossRef] [PubMed]
- Cabrera, M.S.; Oomens, C.W.J.; Bouten, C.V.C.; Bogers, A.J.J.C.; Hoerstrup, S.P.; Baaijens, F.P.T. Mechanical Analysis of Ovine and Pediatric Pulmonary Artery for Heart Valve Stent Design. J. Biomech. 2013, 46, 2075–2081. [Google Scholar] [CrossRef] [PubMed]
- ISO 37:2024; Rubber, Vulcanized or Thermoplastic. Determination of Tensile Stress-Strain Properties. International Organization for Standardization: Geneva, Switzerland, 2017.
- Liao, Z.; Yang, J.; Hossain, M.; Chagnon, G.; Jing, L.; Yao, X. On the Stress Recovery Behaviour of Ecoflex Silicone Rubbers. Int. J. Mech. Sci. 2021, 206, 106624. [Google Scholar] [CrossRef]
- Stretch Conductive Fabric Less EMF. Available online: https://lessemf.com/product/stretch-conductive-fabric/ (accessed on 15 October 2024).
- Silverell Fabric Less EMF. Available online: https://lessemf.com/product/silverell-fabric/ (accessed on 15 October 2024).
- Technik-Tex P130+B Shieldex. Available online: https://www.shieldex.de/en/products/shieldex-technik-tex-p130-b/ (accessed on 15 October 2024).
- Technik-Tex P180+B Shieldex. Available online: https://www.shieldex.de/en/products/shieldex-technik-tex-p180-b/ (accessed on 15 October 2024).
- Med-Tex P130. Available online: https://www.shieldex.de/products/shieldex-med-tex-p130/ (accessed on 15 October 2024).
- Schroeder, V.; Savagatrup, S.; He, M.; Lin, S.; Swager, T.M. Carbon Nanotube Chemical Sensors. Chem. Rev. 2019, 119, 599–663. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.; Lu, N. Gauge Factor and Stretchability of Silicon-on-Polymer Strain Gauges. Sensors 2013, 13, 8577–8594. [Google Scholar] [CrossRef] [PubMed]
- Ebnesajjad, S. Surface and Material Characterization Techniques. In Handbook of Adhesives and Surface Preparation; Elsevier: Amsterdam, The Netherlands, 2011; pp. 31–48. ISBN 978-1-4377-4461-3. [Google Scholar]
- Mersch, J.; Winger, H.; Nocke, A.; Cherif, C.; Gerlach, G. Experimental Investigation and Modeling of the Dynamic Resistance Response of Carbon Particle-Filled Polymers. Macromol. Mater. Eng. 2020, 305, 2000361. [Google Scholar] [CrossRef]



| Drift, Max Hysteresis Error, and Operating Range | |||||
|---|---|---|---|---|---|
| Sensor #1 | Sensor #3 | Sensor #4 | Sensor #5 | ||
| Drift | (mean ± std) | (0.050 ± 0.010) | (0.027 ± 0.024) | (0.090 ± 0.008) | (0.033 ± 0.020) |
| Max hysteresis error 1st cycle | Sample 1 | 0.35 | 0.13 | 0.05 | 0.12 |
| Sample 2 | 0.30 | 0.03 | 0.09 | 0.05 | |
| Sample 3 | 0.19 | 0.06 | 0.10 | 0.13 | |
| Max hysteresis error 99th cycle | Sample 1 | 0.25 | 0.35 | 0.16 | 0.20 |
| Sample 2 | 0.33 | 0.19 | 0.15 | 0.06 | |
| Sample 3 | 0.30 | 0.25 | 0.15 | 0.26 | |
| Operating range 1st cycle | Sample 1 | 0–19.5 | 0–17.0 | 0–12.5 | 0–17.0 |
| Sample 2 | 0–20.8 | 0–20.5 | 0–8.6 | 0–9.3 | |
| Sample 3 | 0–22.4 | 0–18.6 | 0–12.1 | 0–14.7 | |
| Operating range 99th cycle | Sample 1 | 0–35.8 | 0–25.0 | 0–19.2 | 0–22.4 |
| Sample 2 | 0–34.6 | 0–25.0 | 0–17.0 | 0–24.0 | |
| Sample 3 | 0–31.7 | 0–27.8 | 0–17.6 | 0–19.8 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gamberini, G.; Tognarelli, S.; Menciassi, A. Soft Conductive Textile Sensors: Characterization Methodology and Behavioral Analysis. Sensors 2025, 25, 4448. https://doi.org/10.3390/s25144448
Gamberini G, Tognarelli S, Menciassi A. Soft Conductive Textile Sensors: Characterization Methodology and Behavioral Analysis. Sensors. 2025; 25(14):4448. https://doi.org/10.3390/s25144448
Chicago/Turabian StyleGamberini, Giulia, Selene Tognarelli, and Arianna Menciassi. 2025. "Soft Conductive Textile Sensors: Characterization Methodology and Behavioral Analysis" Sensors 25, no. 14: 4448. https://doi.org/10.3390/s25144448
APA StyleGamberini, G., Tognarelli, S., & Menciassi, A. (2025). Soft Conductive Textile Sensors: Characterization Methodology and Behavioral Analysis. Sensors, 25(14), 4448. https://doi.org/10.3390/s25144448