
High-Performance Guided Mode Resonance Optofluidic Sensor

Abstract
1. Introduction
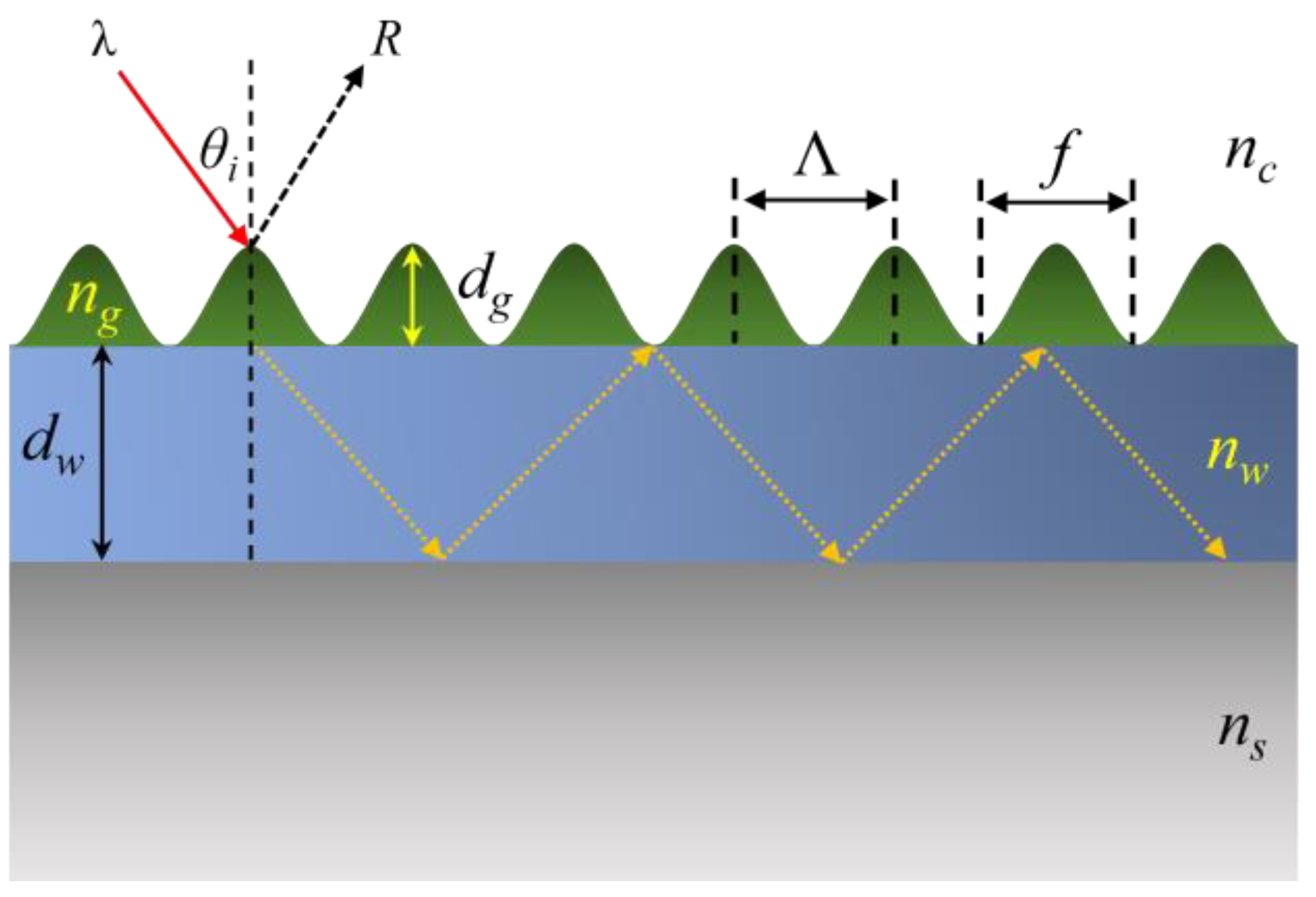
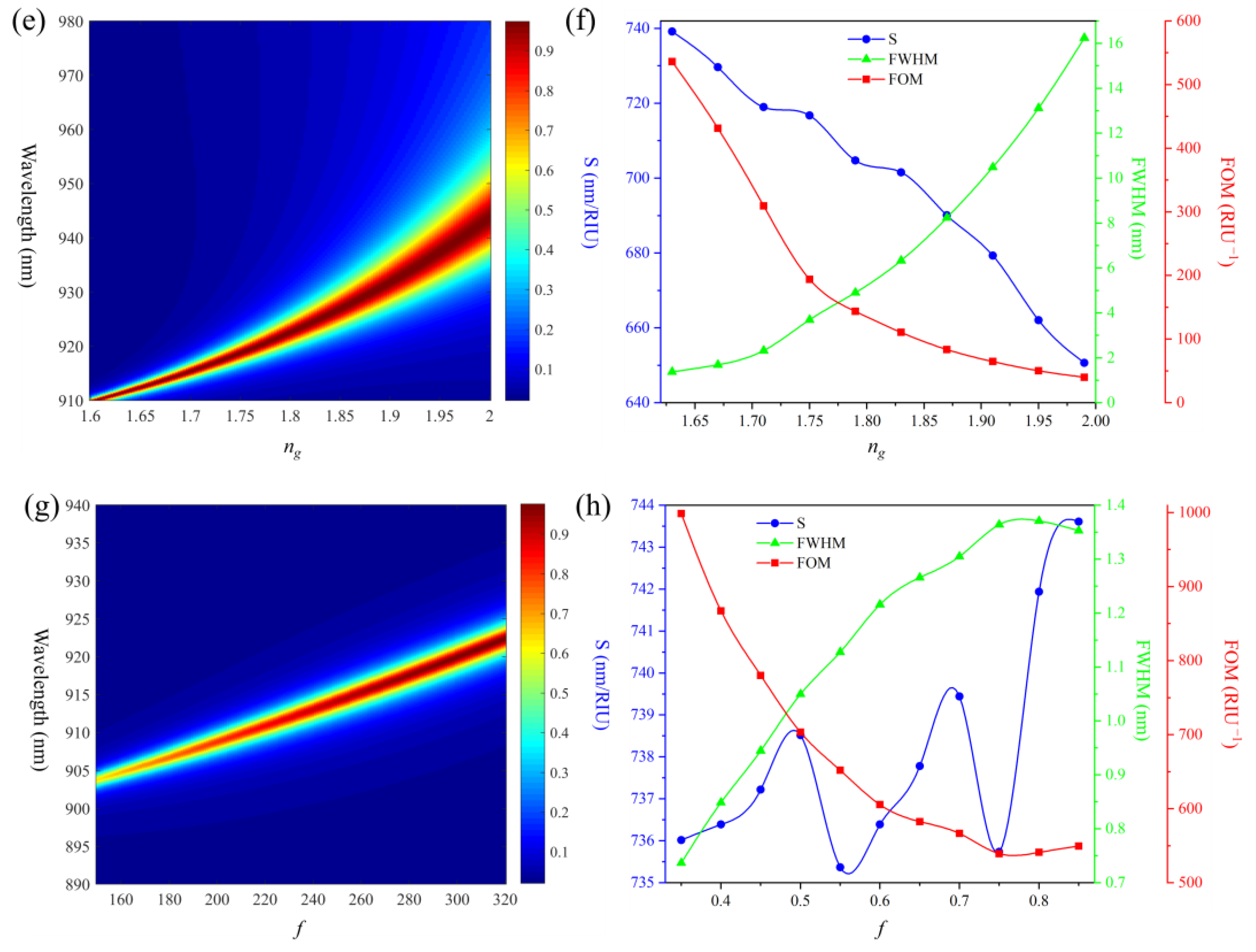
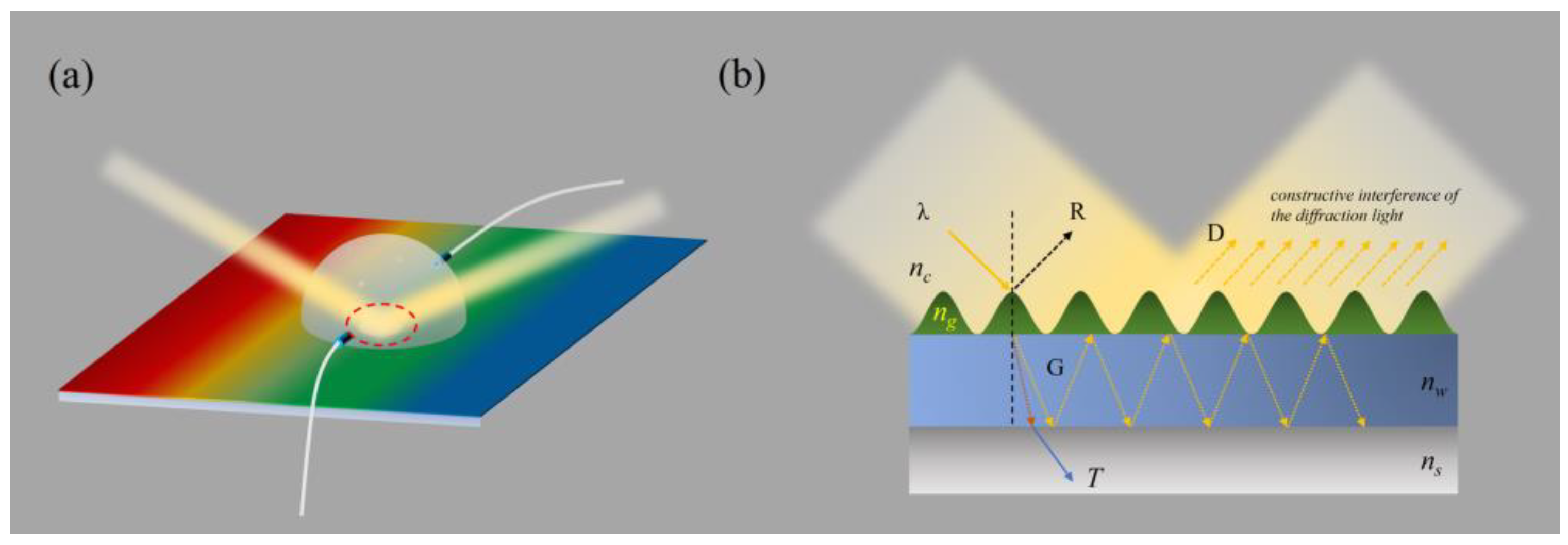
2. Theory and Structure Optimization
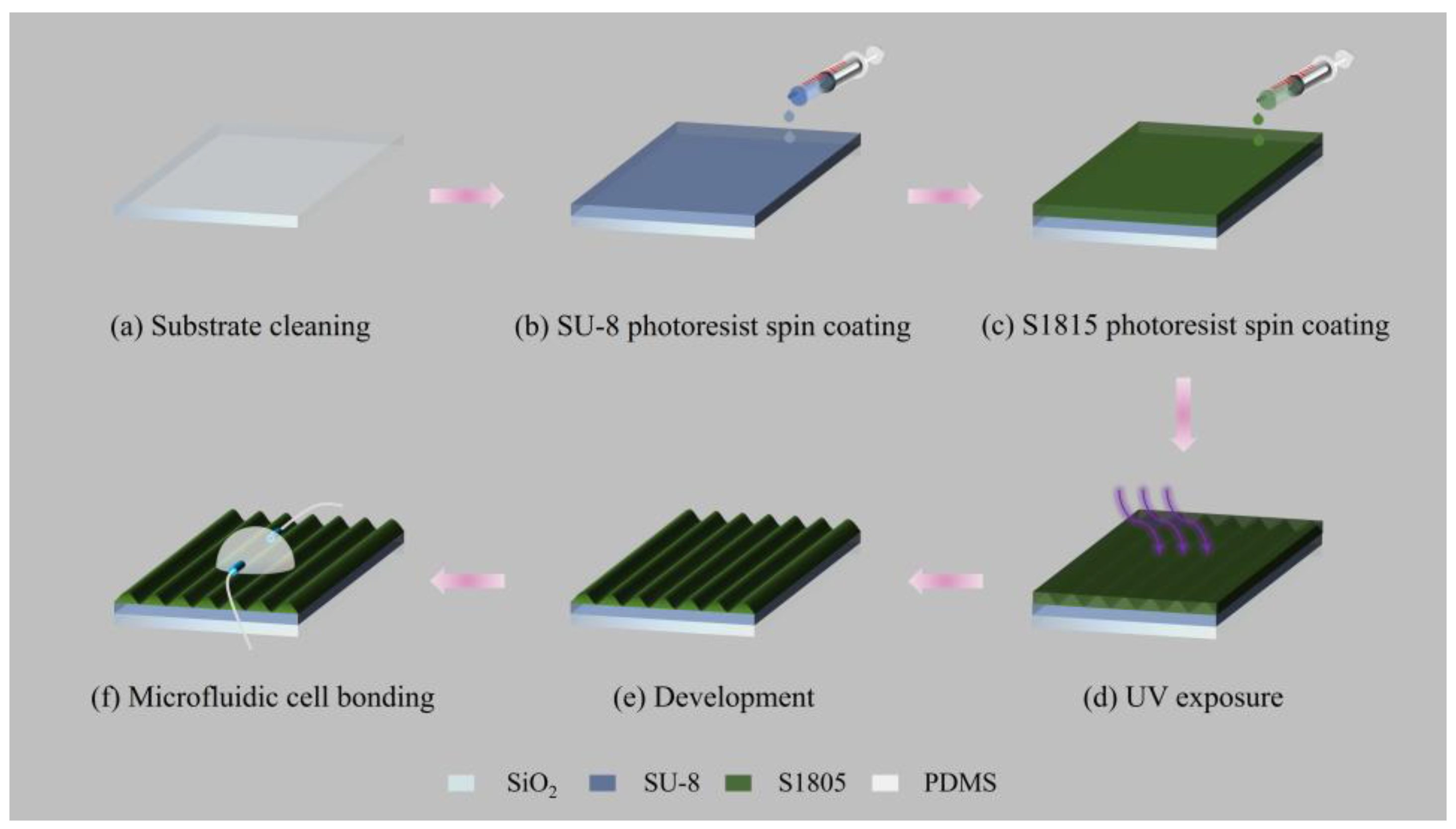
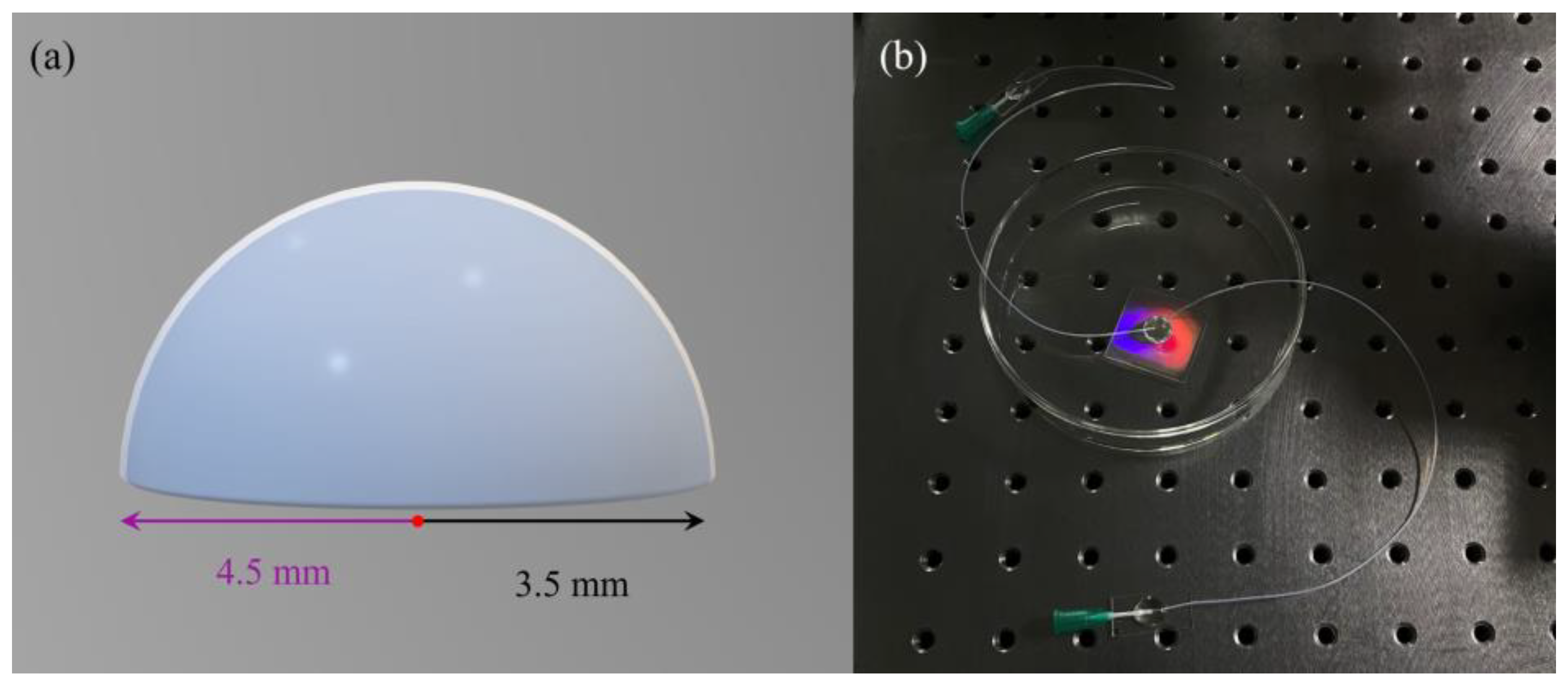
3. Fabrication of GMR Optofluidic Sensor
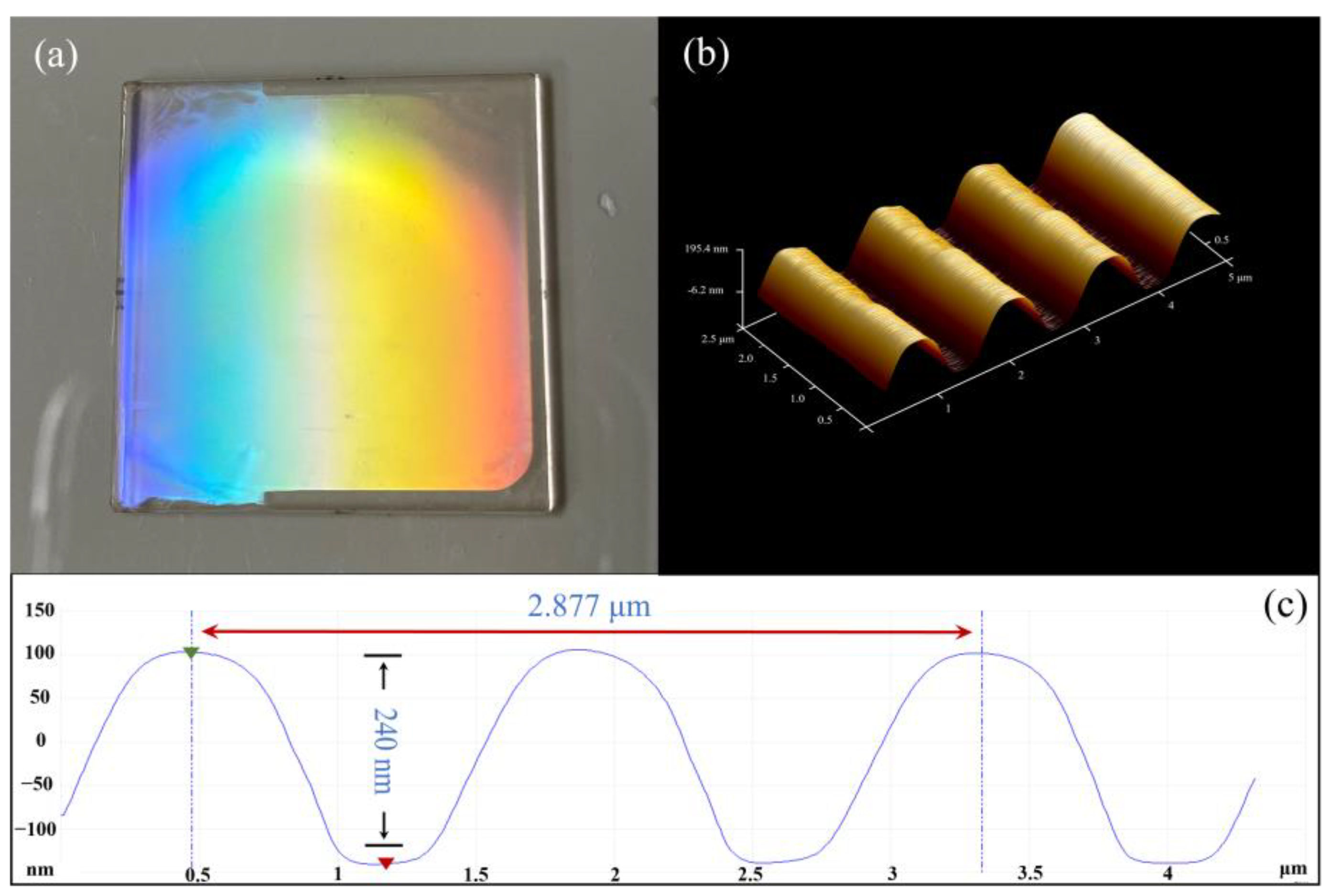
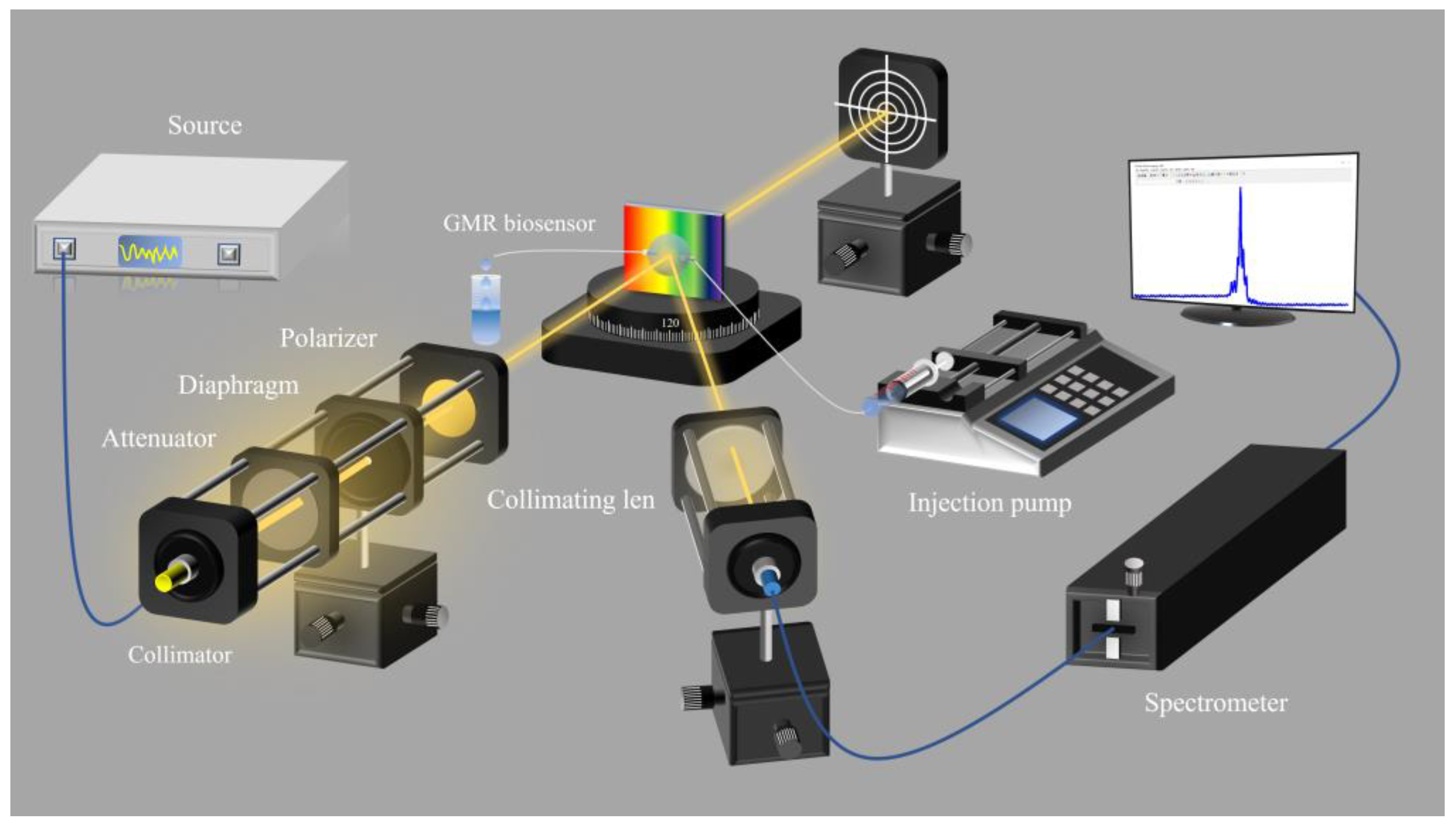
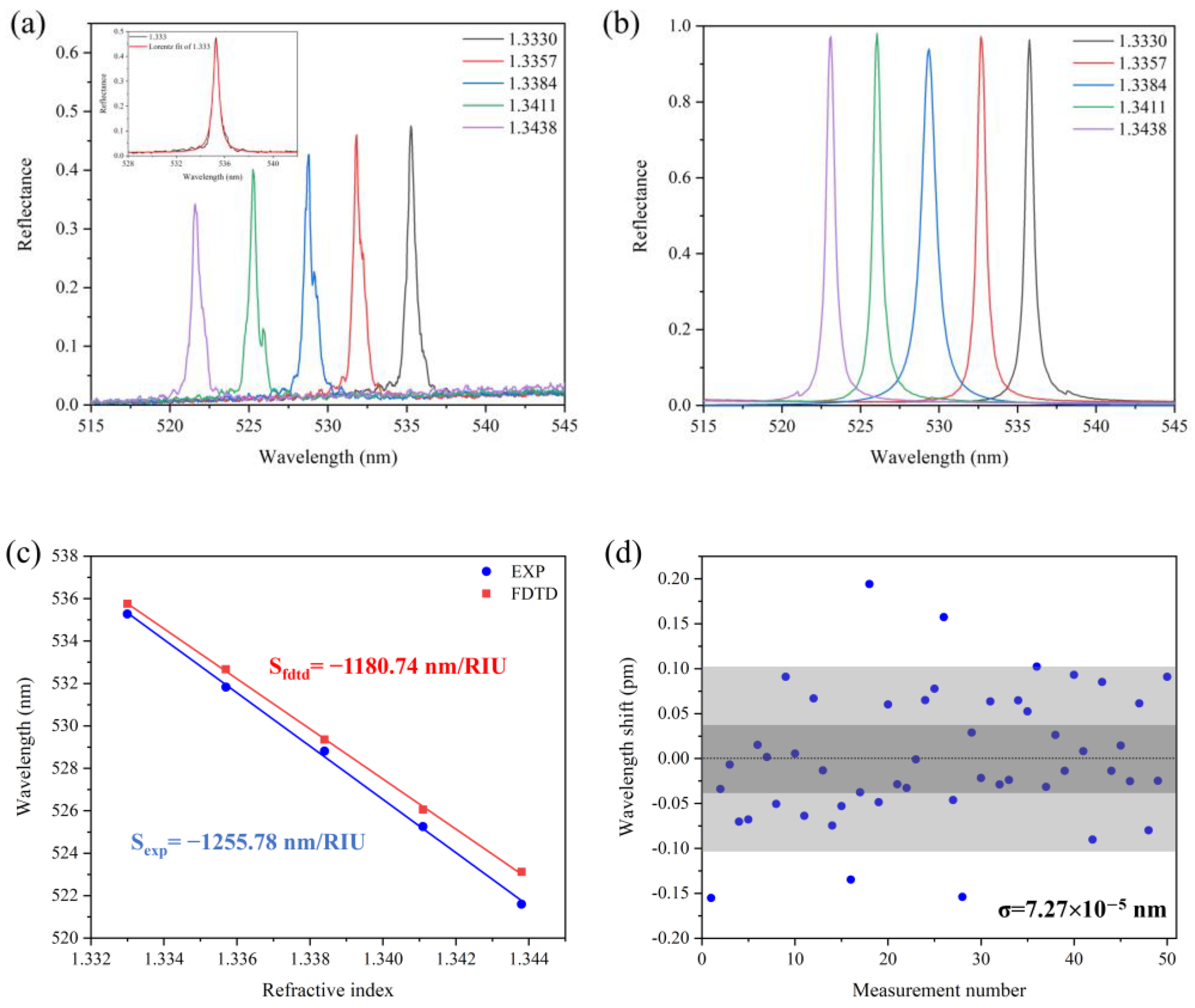
4. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wood, R.W. On a remarkable case of uneven distribution of light in a diffraction grating spectrum. Philos. Mag. 1902, 4, 396–402. [Google Scholar] [CrossRef]
- Rochon, P.; Natansohn, A.; Callender, C.L.; Robitaille, L. Guided mode resonance filters using polymer films. Appl. Phys. Lett. 1997, 71, 1008–1010. [Google Scholar] [CrossRef]
- Liu, Z.S.; Tibuleac, S.; Shin, D.; Young, P.P.; Magnusson, R. High-efficiency guided-mode resonance filter. Opt. Lett. 1998, 23, 1556–1558. [Google Scholar] [CrossRef] [PubMed]
- Fang, C.; Bo, D.; Zheng, L.; Zahid, A.; Zhang, D. Tunable guided-mode resonance filter with a gradient grating period fabricated by casting a stretched pdms grating wedge. Opt. Lett. 2016, 41, 5302–5305. [Google Scholar] [CrossRef]
- Kuo, W.-K.; Hsu, C.-J. Two-dimensional grating guided-mode resonance tunable filter. Opt. Express 2017, 25, 29642–29649. [Google Scholar] [CrossRef]
- Katchalski, T.; Levy-Yurista, G.; Friesem, A.; Martin, G.; Hierle, R.; Zyss, J. Light modulation with electro-optic polymer-based resonant grating waveguide structures. Opt. Express 2005, 13, 4645–4650. [Google Scholar] [CrossRef]
- Lee, K.J.; Lacomb, R.; Britton, B.; Shokooh-Saremi, M.; Silva, H.; Donkor, E. Silicon-layer guided-mode resonance polarizer with 40-nm bandwidth. IEEE Photonics. Technol. Lett. 2008, 20, 1857–1859. [Google Scholar] [CrossRef]
- Karagodsky, V.; Sedgwick, F.G.; Chang-Hasnain, C.J. Theoretical analysis of subwavelength high contrast grating reflectors. Opt. Express 2010, 18, 16973–16988. [Google Scholar] [CrossRef]
- Zhang, S.; Ko, Y.H.; Magnusson, R. Broadband guided-mode resonant reflectors with quasi-equilateral triangle grating profiles. Opt. Express 2017, 25, 28451–28458. [Google Scholar] [CrossRef]
- Cunningham, B.; Li, P.; Lin, B.; Pepper, J. Colorimetric resonant reflection as a direct biochemical assay technique. Sens. Actuators B 2002, 81, 316–328. [Google Scholar] [CrossRef]
- Choi, C.J.; Cunningham, B.T. A 96-well microplate incorporating a replica molded microfluidic network integrated with photonic crystal biosensors for high throughput kinetic biomolecular interaction analysis. Lab Chip 2007, 7, 550–556. [Google Scholar] [CrossRef] [PubMed]
- Huang, C.S.; Chaudhery, V.; Pokhriyal, A.; George, S.; Polans, J.; Lu, M.; Cunningham, B.T. Multiplexed cancer biomarker detection using quartz-based photonic crystal surfaces. Anal. Chem. 2012, 84, 1126–1133. [Google Scholar] [CrossRef]
- Tan, Y.; Halsey, J.F.; Tang, T.; Wetering, S.V.; Cunningham, B.T. Application of photonic crystal enhanced fluorescence to detection of low serum concentrations of human ige antibodies specific for a purified cat allergen (fel d1). Biosens. Bioelectron. 2016, 77, 194–201. [Google Scholar] [CrossRef]
- Zhuo, Y.; Ji, S.C.; Marin, T.; Yu, H.; Harley, B.A.; Cunningham, B.T. Quantitative analysis of focal adhesion dynamics using photonic resonator outcoupler microscopy (prom). Light Sci. Appl. 2018, 7, 104–118. [Google Scholar] [CrossRef]
- Tibuleac, S.; Wawro, D.; Magnusson, R. Resonant diffractive structures integrating waveguide-gratings on optical fiber endfaces. In Proceedings of the 1999 IEEE LEOS Annual Meeting Conference Proceedings. LEOS’99. 12th Annual Meeting. IEEE Lasers and Electro-Optics Society 1999 Annual Meeting (Cat. No. 99CH37009), San Francisco, CA, USA, 8–11 November 1999; IEEE: Toulouse, France, 1999; Volume 2, pp. 874–875. [Google Scholar]
- Xu, Y.; Bai, P.; Zhou, X.; Akimov, Y.; Png, C.E.; Ang, L.K.; Wu, L. Optical refractive index sensors with plasmonic and photonic structures: Promising and inconvenient truth. Adv. Opt. Mater. 2019, 7, 1801433. [Google Scholar] [CrossRef]
- Zhang, M.; Lu, M.; Ge, C.; Cunningham, B.T. Plasmonic external cavity laser refractometric sensor. Opt. Express 2014, 22, 20347–20357. [Google Scholar] [CrossRef] [PubMed]
- Hermannsson, P.G.; Sørensen, K.T.; Vannahme, C.; Smith, C.L.; Klein, J.J.; Russew, M.M.; Kristensen, A. All-polymer photonic crystal slab sensor. Opt. Express 2015, 23, 16529–16539. [Google Scholar] [CrossRef] [PubMed]
- Nazirizadeh, Y.; Von Oertzen, F.; Karrock, T.; Greve, J.; Gerken, M. Enhanced sensitivity of photonic crystal slab transducers by oblique-angle layer deposition. Opt. Express 2013, 21, 18661–18670. [Google Scholar] [CrossRef]
- Boonruang, S.; Mohammed, W.S. Multiwavelength guided mode resonance sensor array. Appl. Phys. Express 2015, 8, 092004. [Google Scholar] [CrossRef]
- Ku, Y.F.; Li, H.Y.; Hsieh, W.H.; Chau, L.K.; Chang, G.E. Enhanced sensitivity in injection-molded guided-mode-resonance sensors via low-index cavity layers. Opt. Express 2015, 23, 14850–14859. [Google Scholar] [CrossRef]
- Lin, S.F.; Wang, C.M.; Ding, T.J.; Tsai, Y.L.; Yang, T.H.; Chen, W.Y.; Chang, J.Y. Sensitive metal layer assisted guided mode resonance biosensor with a spectrum inversed response and strong asymmetric resonance field distribution. Opt. Express 2012, 20, 14584–14595. [Google Scholar] [CrossRef] [PubMed]
- Block, I.D.; Chan, L.L.; Cunningham, B.T. Photonic crystal optical biosensor incorporating structured low-index porous dielectric. Sens. Actuators B Chem. 2006, 120, 187–193. [Google Scholar] [CrossRef]
- Wan, Y.H.; Krueger, N.A.; Ocier, C.R.; Su, P.; Braun, P.V.; Cunningham, B.T. Resonant mode engineering of photonic crystal sensors clad with ultralow refractive index porous silicon dioxide. Adv. Opt. Mater. 2017, 5, 1700605. [Google Scholar] [CrossRef]
- Huang, M.; Yanik, A.A.; Chang, T.Y.; Altug, H. Sub-wavelength nanofluidics in photonic crystal sensors. Opt. Express 2009, 17, 24224. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Li, X.; Li, S.; Guo, Z.; Zeng, P.; He, J.; Wu, X. Symmetric guided-mode resonance sensors in aqueous media with ultrahigh figure of merit. Opt. Express 2019, 27, 34788–34802. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Y.; Zhao, D.; Yang, H.; Zhou, W.; Sun, Y. Optofluidic Fano resonance photonic crystal refractometric sensors. Appl. Phys. Lett. 2017, 110, 091105. [Google Scholar] [CrossRef]
- Maksimov, D.N.; Gerasimov, V.S.; Romano, S.; Polyutov, S.P. Refractive index sensing with optical bound states in the continuum. Opt. Express 2020, 28, 38907–38916. [Google Scholar] [CrossRef] [PubMed]
- Pitruzzello, G.; Krauss, T.F. Photonic crystal resonances for sensing and imaging. J. Opt. 2018, 20, 073004. [Google Scholar] [CrossRef]
- Huang, Q.; Peh, J.; Hergenrother, P.J.; Cunningham, B.T. Porous photonic crystal external cavity laser biosensor. Appl. Phys. Lett. 2016, 109, 071103. [Google Scholar] [CrossRef]
- White, I.M.; Fan, X. On the performance quantification of resonant refractive index sensors. Opt. Express 2008, 16, 1020–1028. [Google Scholar] [CrossRef]
- Mesli, S.; Yala, H.; Hamidi, M.; BelKhir, A.; Baida, F.I. High performance for refractive index sensors via symmetry-protected guided mode resonance. Opt. Express 2021, 29, 21199–21211. [Google Scholar] [CrossRef] [PubMed]
- Guo, L.; Xu, L.; Liu, L. Sensitivity enhancement of guided mode resonance sensors under oblique incidence. Photonics Res. 2024, 12, 2667. [Google Scholar] [CrossRef]
- Qian, L.; Wang, K.; Bykov, D.A.; Xu, Y.; Yan, C. Improving the sensitivity of guided-mode resonance sensors under oblique incidence condition. Opt. Express 2019, 27, 30563. [Google Scholar] [CrossRef] [PubMed]
- Lee, K.J.; Wawro, D.; Priambodo, P.S.; Magnusson, R. Agarose-gel based guided-mode resonance humidity sensor. IEEE Sens. J. 2007, 7, 409–414. [Google Scholar] [CrossRef]
- Orgovan, N.; Kovacs, B.; Farkas, E.; Szabo, B.; Zaytseva, N.; Fang, Y. Bulk and surface sensitivity of a resonant waveguide grating imager. Appl. Phys. Lett. 2014, 104, 083506. [Google Scholar] [CrossRef]
- Qian, L.; Wang, K.; Zhu, W.; Han, C.; Yan, C. Enhanced sensing ability in a single-layer guided-mode resonant optical biosensor with deep grating. Opt. Commun. 2019, 452, 273–280. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, S.; Zhao, D.; Zhou, W.; Sun, Y. High quality factor photonic crystal filter at k≈0 and its application for refractive index sensing. Opt. Express. 2017, 25, 10536–10545. [Google Scholar] [CrossRef]
- Choi, B.; Dou, X.; Fang, Y.; Phillips, B.M.; Jiang, P. Outstanding surface plasmon resonance performance enabled by templated oxide gratings. Phys. Chem. Chem. Phys. 2016, 18, 26078–26087. [Google Scholar] [CrossRef]
- Dou, X.; Chung, P.Y.; Jiang, P.; Dai, J. Surface plasmon resonance and surface-enhanced Raman scattering sensing enabled by digital versatile discs. Appl. Phys. Lett. 2012, 100, 041116. [Google Scholar] [CrossRef]
- Bridges, C.R.; DiCarmine, P.M.; Seferos, D.S. Gold nanotubes as sensitive, solution-suspendable refractive index reporters. Chem. Mater. 2012, 24, 963–965. [Google Scholar] [CrossRef]
- Larsson, E.M.; Alegret, J.; Käll, M.; Sutherland, D.S. Sensing characteristics of NIR localized surface plasmon resonances in gold nanorings for application as ultrasensitive biosensors. Nano Lett. 2007, 7, 1256–1263. [Google Scholar] [CrossRef]
- PaIvaNranta, B.; Merbold, H.; Giannini, R.; BuChi, L.; Gorelick, S.; David, C. High aspect ratio plasmonic nanostructures for sensing applications. Acs Nano 2011, 5, 6374–6382. [Google Scholar] [CrossRef]
- Cao, Z.L.; Wong, S.L.; Wu, S.Y.; Ho, H.P.; Ong, H.C. High performing phase-based surface plasmon resonance sensing from metallic nanohole arrays. Appl. Phys. Lett. 2014, 104, 171116. [Google Scholar] [CrossRef]
- Tetz, K.A.; Pang, L.; Fainman, Y. High-resolution surface plasmon resonance sensor based on linewidth-optimized nanohole array transmittance. Opt. Lett. 2006, 31, 1528–1530. [Google Scholar] [CrossRef]
- Eitan, M.; Iluz, Z.; Yifat, Y.; Boag, A.; Hanein, Y.; Scheuer, J. Degeneracy breaking of Wood’s anomaly for enhanced refractive index sensing. Acs Photonics 2015, 2, 615–621. [Google Scholar] [CrossRef]
- Zhou, Y.; Guo, Z.; Zhao, X.; Wang, F.; Yu, Z.; Chen, Y.; Wu, X. Dual-Quasi Bound States in the Continuum Enabled Plasmonic Metasurfaces. Adv. Opt. Mater. 2022, 10, 2200965. [Google Scholar] [CrossRef]
- Shen, Y.; Zhou, J.; Liu, T.; Tao, Y.; Jiang, R.; Liu, M.; Wang, J. Plasmonic gold mushroom arrays with refractive index sensing figures of merit approaching the theoretical limit. Nat. Commun. 2013, 4, 2381. [Google Scholar] [CrossRef]
- Lee, K.L.; Huang, J.B.; Chang, J.W.; Wu, S.H.; Wei, P.K. Ultrasensitive biosensors using enhanced Fano resonances in capped gold nanoslit arrays. Sci. Rep. 2015, 5, 8547. [Google Scholar] [CrossRef]
- Yanik, A.A.; Cetin, A.E.; Huang, M.; Artar, A.; Mousavi, S.H.; Khanikaev, A. Seeing protein monolayers with naked eye through plasmonic fano resonances. Proc. Natl. Acad. Sci. USA 2011, 108, 11784–11789. [Google Scholar] [CrossRef]
- Watad, I.; Abdulhalim, I. Spectropolarimetric surface plasmon resonance sensor and the selection of the best polarimetric function. IEEE J. Sel. Top. Quantum Electron. 2016, 23, 89–97. [Google Scholar] [CrossRef]
- Lu, M.; Liang, Y.; Qian, S.; Li, L.; Jing, Z.; Masson, J.F.; Peng, W. Optimization of surface plasmon resonance biosensor with Ag/Au multilayer structure and fiber-optic miniaturization. Plasmonics 2017, 12, 663–673. [Google Scholar] [CrossRef]
- Mishra, S.K.; Zou, B.; Chiang, K.S. Surface-plasmon-resonance refractive-index sensor with cu-coated polymer waveguide. IEEE Photonics. Technol. Lett. 2016, 28, 1835–1838. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Results | Simulation Results | |||||
|---|---|---|---|---|---|---|
| Implementation | S (nm/RIU) | FWHM (nm) | FOM (RIU−1) | S (nm/RIU) | FWHM (nm) | FOM (RIU−1) |
| TE-1 40° | 922.55 | 1.48 | 643.61 | 823.63 | 1.24 | 664.22 |
| TM-1 40° | 912.69 | 1.26 | 724.36 | 802.45 | 0.63 | 1273.73 |
| TE-1 50° | 1099.84 | 1.70 | 646.96 | 1008.25 | 1.39 | 725.36 |
| TM-1 50° | 1093.55 | 1.61 | 679.22 | 1003.77 | 0.80 | 1254.71 |
| TE-1 60° | 1221.14 | 1.29 | 946.62 | 1154.48 | 1.04 | 1110.08 |
| TM-1 60° | 1202.48 | 0.81 | 1484.54 | 1133.81 | 0.69 | 1643.20 |
| TM-1 65° | 1255.78 | 0.59 | 2128.44 | 1180.74 | 0.62 | 1904.42 |
| Structures/Implementations | λR (nm) | S (nm/RIU) | FWHM (nm) | FOM (RIU−1) | DL (RIU) | Ref. |
|---|---|---|---|---|---|---|
| Typical structure | ~774 | 87.88 | ~7 | ~13 | 3.4 × 10−5 | [10] |
| All-polymer | 573 | 31 | 0.9 | 34 | 4.5 × 10−6 | [18] |
| Oblique-angle layer deposition | ~597 | 61 | ~6 | ~10 | / | [19] |
| Chirped grating period | ~676 | 160 | 12 | 13 | 7.0 × 10−6 | [20] |
| Low-index cavity layers | ~637 | 181.9 | ~9.2 | ~20 | / | [21] |
| Metal layer assisted | ~743 | 376.78 | ~15 | ~25 | / | [22] |
| Low-index porous substrate | 833 | 300 | 3.5 | ~86 | [23] | |
| Ultralow RI substrate | ~798 | 502 | ~10 | ~50 | / | [24] |
| Free-standing photonic crystals | ~850 | 510 | ~10 | ~51 | / | [25] |
| Oblique incidence condition | 807 | 452.1 | ~5 | ~90 | / | [34] |
| Agarose-Gel Based | 848 | 450 | ~5 | ~90 | / | [35] |
| Waveguide grating imager | 828.8 | 113.85 | 1.593 | 71 | 2.2 × 10−6 | [36] |
| Single-layer | 616 | 229.43 | 7.28 | 32 | / | [37] |
| This work | 535 | 1255.78 | 0.59 | 2128 | 1.74 × 10−7 |
| Types | λR (nm) | S (nm/RIU) | FOM (RIU−1) | Ref. |
|---|---|---|---|---|
| Grating coupling | 1060 | 859.2 | 62.5 | [39] |
| Grating coupling | 1020 | 858 | 150.46 | [40] |
| Metallic NP-based LSPR | 1036 | 770 | 2.42 | [41] |
| Metallic NP-based LSPR | 1545 | 880 | 2 | [42] |
| Metallic NP-based LSPR | 786 | 540 | 21.5 | [43] |
| Nanohole-based LSPR | 985.5 | 753.06 | 2091 | [44] |
| Nanohole-based LSPR | ~1547 | 1022 | 410 | [45] |
| Nanohole-based LSPR | ~1541 | 1050 | 208 | [46] |
| BIC in plasmonic | ~874 | 657 | 109 | [47] |
| Hybrid types SPR | 1288 | 1015 | 108 | [48] |
| Hybrid types SPR | 1318 | 926 | 252 | [49] |
| Hybrid types SPR | 824 | 717 | 162.2 | [50] |
| Prism coupling | 510 | 2875 | 121.31 | [51] |
| Prism coupling | 693 | 4436 | 75.19 | [52] |
| Waveguide coupling | 1478.2 | 38978 | 159.87 | [53] |
| This GMR sensor | 535 | 1255.78 | 2128 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, L.; Xu, L.; Liu, L. High-Performance Guided Mode Resonance Optofluidic Sensor. Sensors 2025, 25, 4386. https://doi.org/10.3390/s25144386
Guo L, Xu L, Liu L. High-Performance Guided Mode Resonance Optofluidic Sensor. Sensors. 2025; 25(14):4386. https://doi.org/10.3390/s25144386
Chicago/Turabian StyleGuo, Liang, Lei Xu, and Liying Liu. 2025. "High-Performance Guided Mode Resonance Optofluidic Sensor" Sensors 25, no. 14: 4386. https://doi.org/10.3390/s25144386
APA StyleGuo, L., Xu, L., & Liu, L. (2025). High-Performance Guided Mode Resonance Optofluidic Sensor. Sensors, 25(14), 4386. https://doi.org/10.3390/s25144386