
Rolling Bearing Degradation Identification Method Based on Improved Monopulse Feature Extraction and 1D Dilated Residual Convolutional Neural Network


Abstract
1. Introduction
2. Bearing Degradation Identification Method
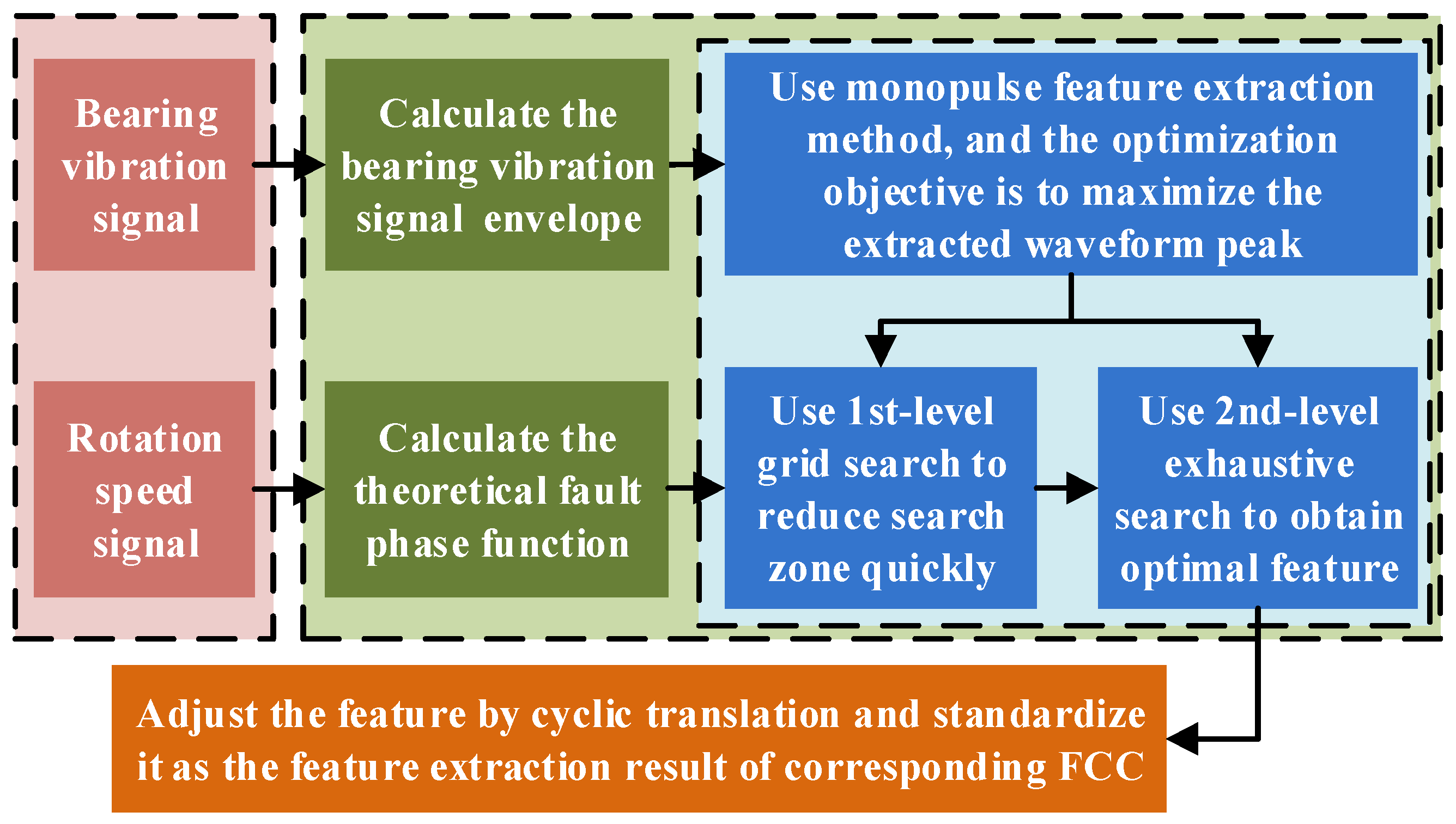
2.1. Improved Monopulse Feature Extraction Method
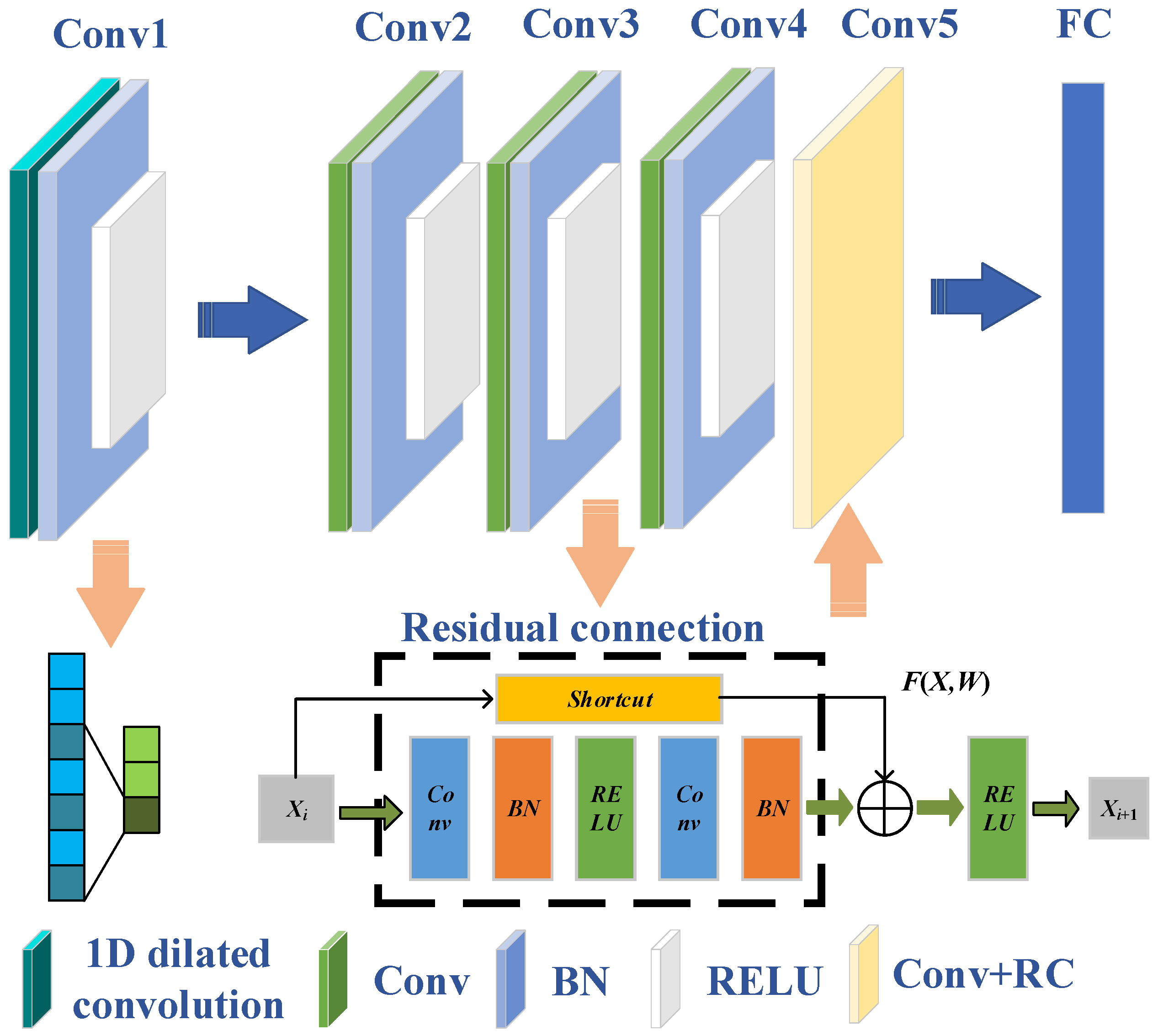
2.2. One-Dimensional Dilated Residual Network
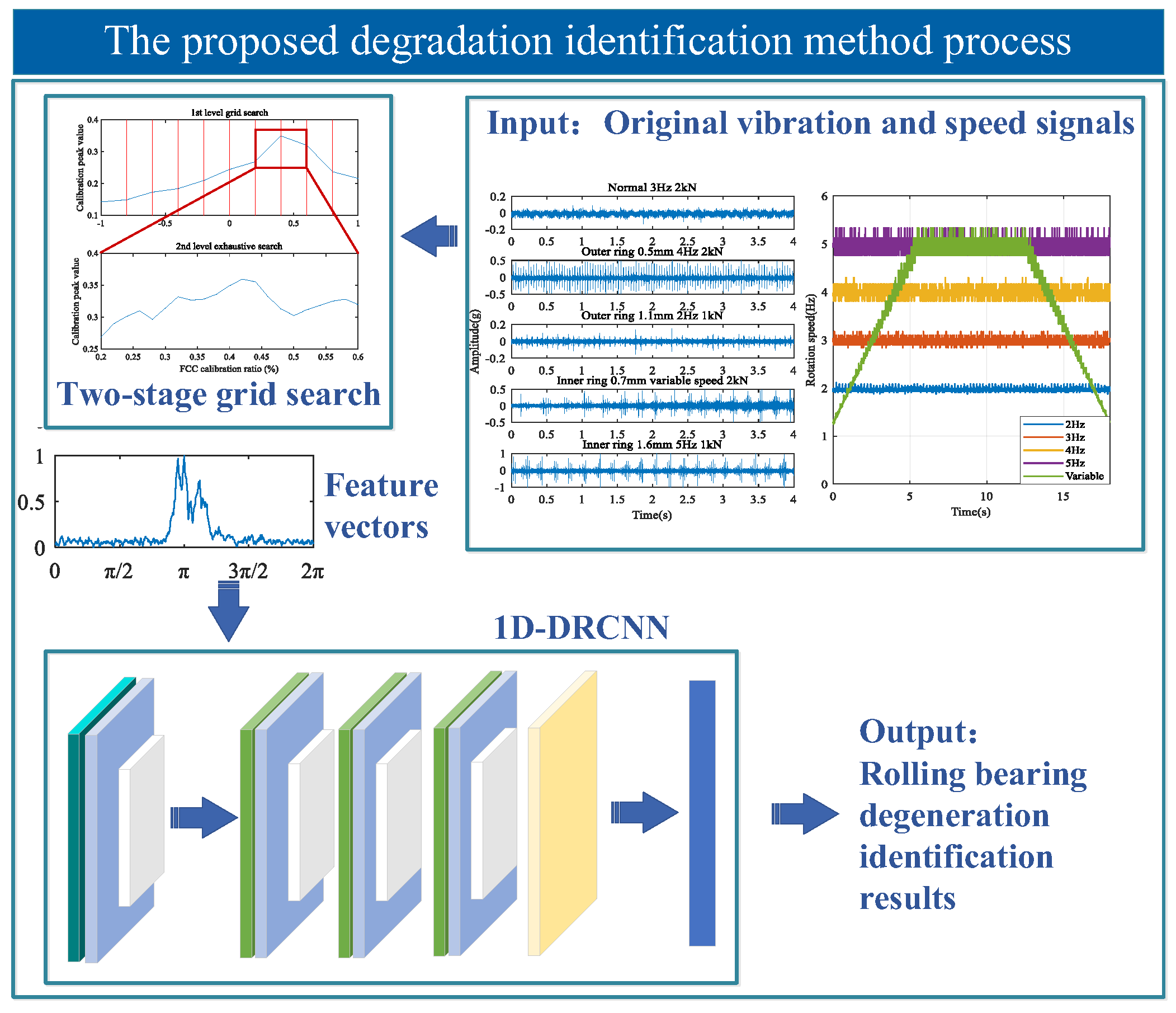
2.3. Degradation Identification Method Process
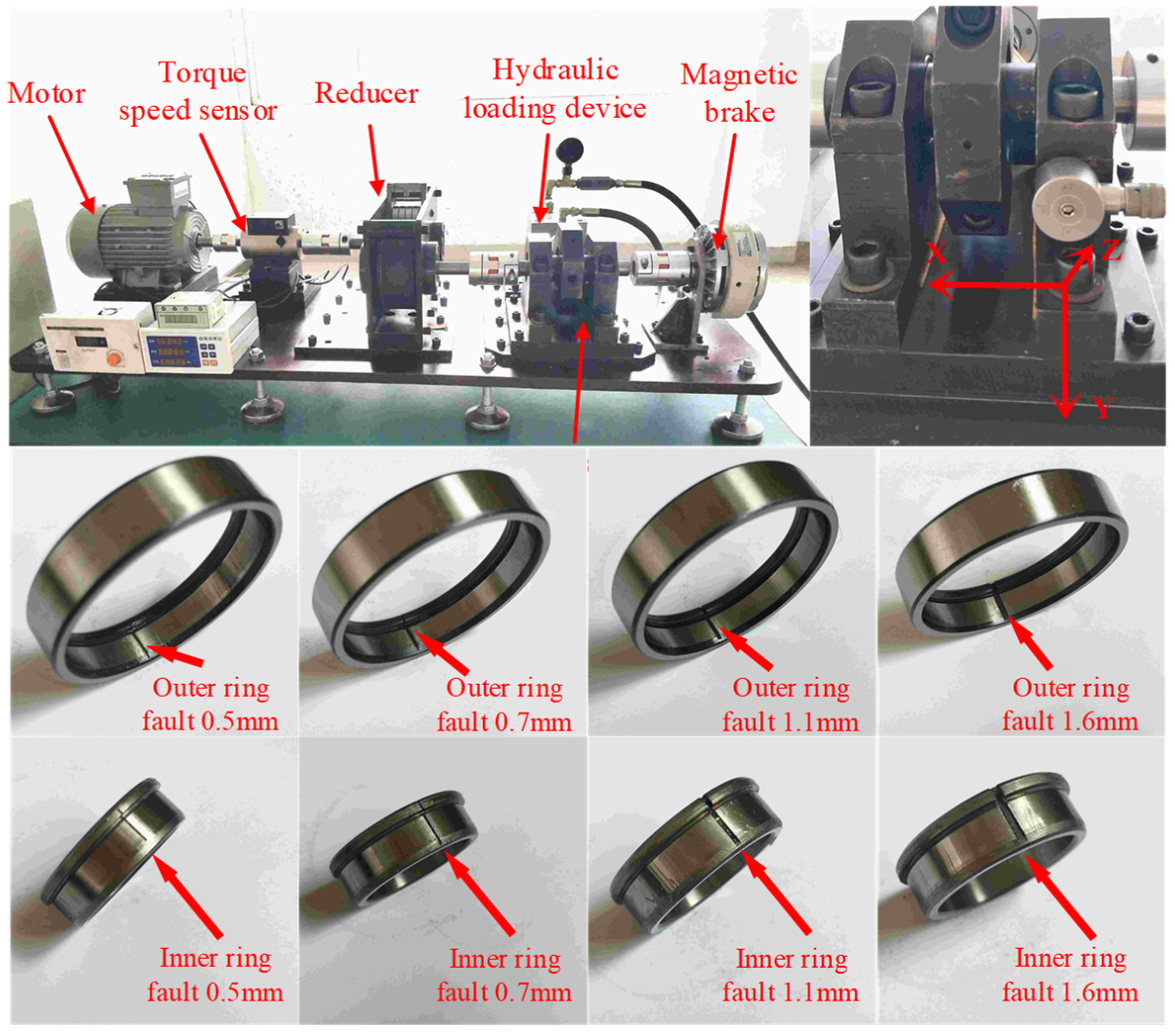
3. Data Collection
4. Experimental Analysis
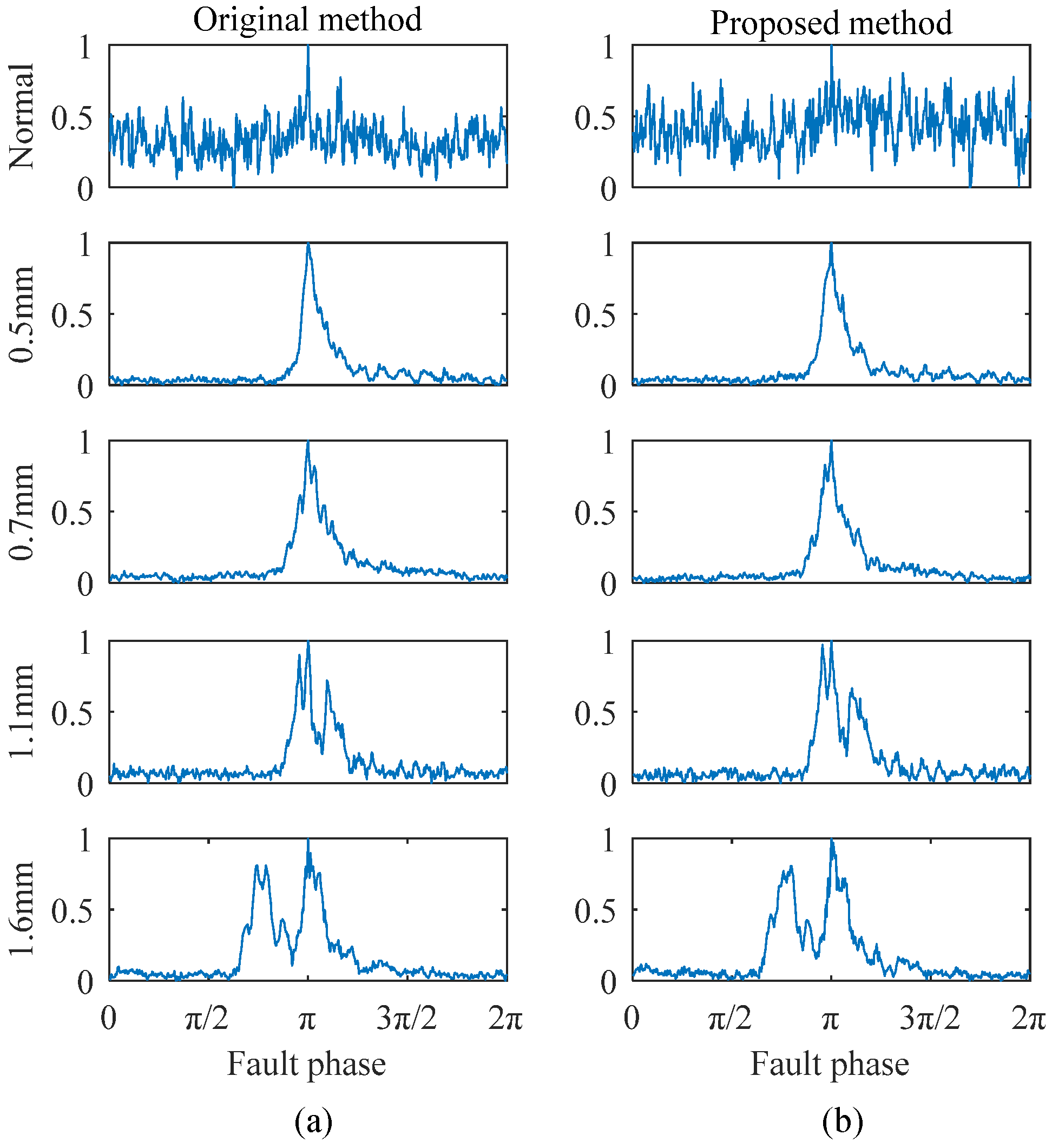
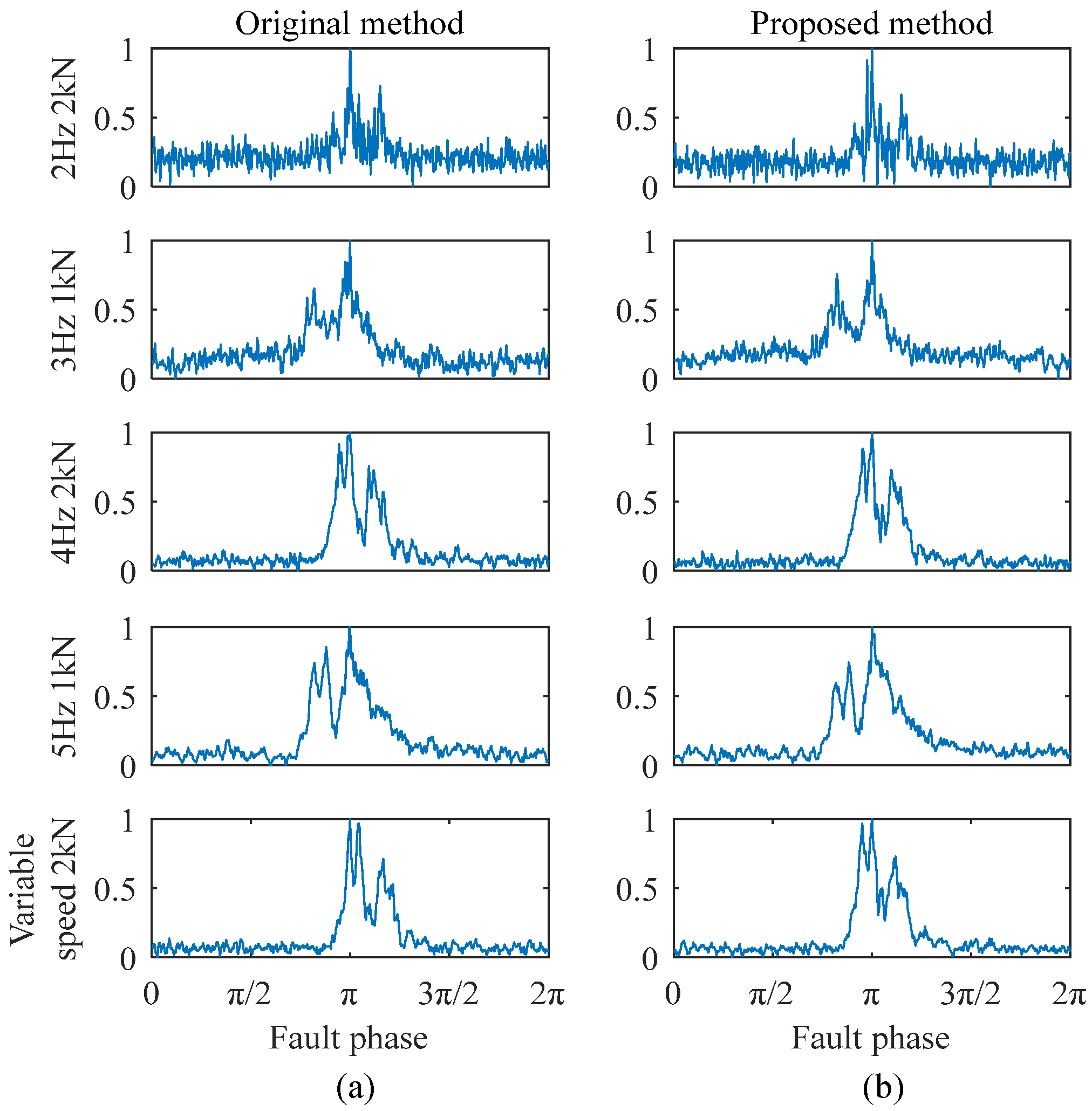
4.1. Analysis of Feature Extraction Effect
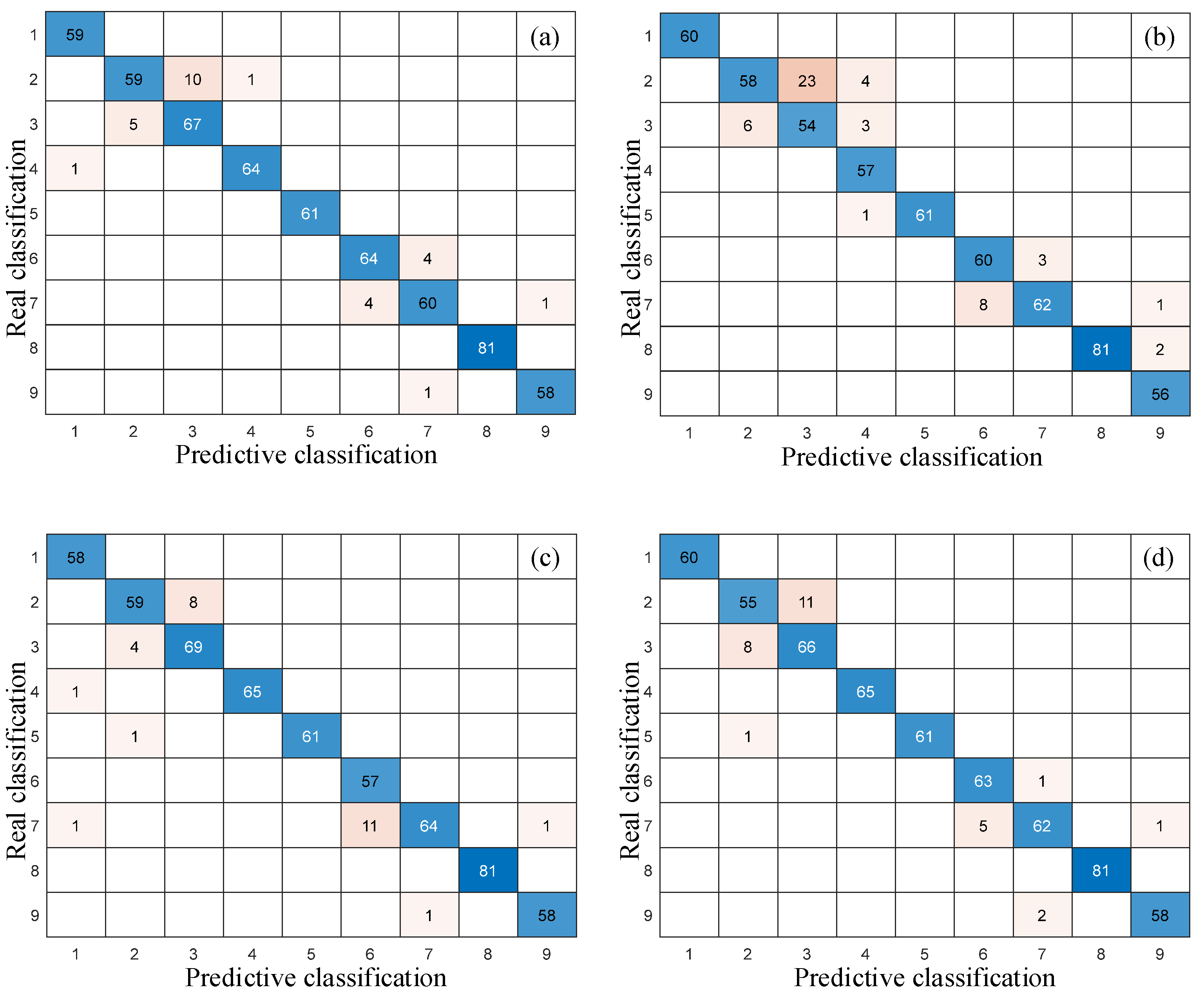
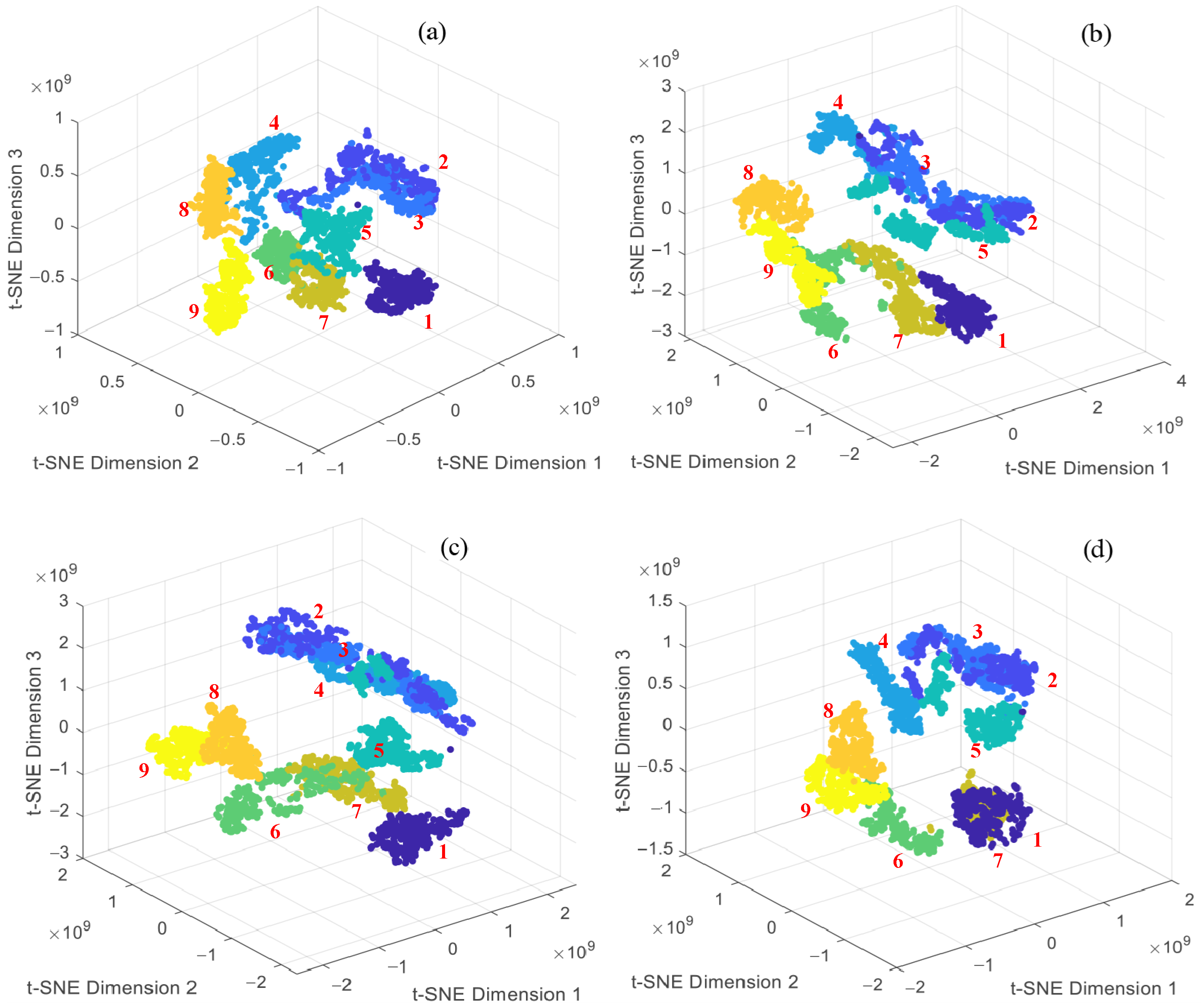
4.2. Diagnosis Analysis
4.3. Comparative Experiment
4.4. Ablation Study
5. Conclusions
- (1)
- The improved monopulse feature extraction method can effectively extract and preserve the normalized waveform characteristics of fault impulses. Compared with the original method, the use of a two-stage grid search strategy significantly reduces the computational cost of FCC iterative calibration while maintaining the same level of calibration accuracy.
- (2)
- For the classification task involving nine similar fault sizes, all tested network architectures achieved accuracy rates exceeding 90%. Among them, the model proposed in this study achieved an overall recognition accuracy of 97.33%. This demonstrates that the monopulse features contain local fault geometric information. It can effectively characterize the bearing degradation states while mitigating the influence of different speeds, loads, and even variable-speed conditions.
- (3)
- The established model employs one-dimensional dilated convolutions to enlarge the receptive field, thereby meeting the requirements for identifying temporally correlated features. The integration of residual connections alleviates issues related to vanishing and exploding gradients, enhancing network learning and generalization capabilities. The comparative analysis of classification, visualization, and ablation study results indicates that the proposed model exhibits better classification performance and is more suitable for bearing degradation diagnosis under complex working conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, H.; Yu, Q.; He, G. Vibration analysis and fault diagnosis of thin-walled bearing in harmonic reducer under periodic loading. J. Sound Vib. 2025, 614, 119174. [Google Scholar] [CrossRef]
- Kumar, A.; Parkash, C.; Tang, H.; Xiang, J. Intelligent framework for degradation monitoring, defect identification and estimation of remaining useful life (RUL) of bearing. Adv. Eng. Inform. 2023, 58, 102206. [Google Scholar] [CrossRef]
- Shi, H.; Li, Y.; Bai, X.; Zhang, K. Sound-aided fault feature extraction method for rolling bearings based on stochastic resonance and time-domain index fusion. Appl. Acoust. 2022, 189, 108611. [Google Scholar] [CrossRef]
- Zhang, K.; Liu, Y.; Zhang, L.; Ma, C.; Xu, Y. Frequency slice graph spectrum model and its application in bearing fault feature extraction. Mech. Syst. Signal Process. 2025, 226, 112383. [Google Scholar] [CrossRef]
- Zou, X.; Zhang, K.; Liu, T.; Jiang, Z.; Xu, Y. An overlapping group sparse variation method for enhancing time–frequency modulation bispectrum characteristics and its applications in bearing fault diagnosis. Measurement 2025, 249, 117066. [Google Scholar] [CrossRef]
- Zhou, J.; Yang, J.; Qin, Y. A systematic overview of health indicator construction methods for rotating machinery. Eng. Appl. Artif. Intell. 2024, 138, 109356. [Google Scholar] [CrossRef]
- Wang, D.; Song, Y.; Xing, J.; Zhuang, Y.; Zhao, J.; Li, Y. Bearing fault diagnosis method based on multi-level information fusion. Adv. Eng. Inform. 2025, 66, 103405. [Google Scholar] [CrossRef]
- Tian, M.; An, W.; Sun, X.; Wang, L.; Chen, C. A non-contact fault diagnosis method based on multi information fusion networks for rolling bearings. Appl. Acoust. 2025, 237, 110776. [Google Scholar] [CrossRef]
- Buchaiah, S.; Shakya, P. Bearing fault diagnosis and prognosis using data fusion based feature extraction and feature selection. Measurement 2022, 188, 110506. [Google Scholar] [CrossRef]
- Zhang, F.; Huang, J.; Chu, F.; Cui, L. Mechanism and method for the full-scale quantitative diagnosis of ball bearings with an inner race fault. J. Sound Vib. 2020, 488, 115641. [Google Scholar] [CrossRef]
- Wu, R.; Wang, X.; Ni, Z.; Zeng, C. Dual-impulse behavior analysis and quantitative diagnosis of the raceway fault of rolling bearing. Mech. Syst. Signal Process. 2022, 169, 108734. [Google Scholar] [CrossRef]
- Ma, Z.; Fu, L.; Tan, D.; Ding, M.; Xu, F.; Zhang, L. A robust hybrid estimation method for local bearing defect size based on analytical model and morphological analysis. ISA Trans. 2025, 157, 392–407. [Google Scholar] [CrossRef] [PubMed]
- Luo, M.; Guo, Y.; Su, Z.; André, H.; Tang, Z.; Zhou, C.; Li, C. Defect quantification evaluation of a rolling element bearing based on physical modelling and instantaneous vibration energy investigation. J. Sound Vib. 2025, 600, 118875. [Google Scholar] [CrossRef]
- Liu, C.; Cheng, G.; Chen, X.; Li, Y.; Pellicano, F. Monopulse feature extraction and fault diagnosis method of rolling bearing under low-speed and heavy-load conditions. Shock Vib. 2021, 2021, 5596776. [Google Scholar] [CrossRef]
- Fu, G.; Wang, X.; Liu, Y.; Yang, Y. A robust bearing fault diagnosis method based on ensemble learning with adaptive weight selection. Expert Syst. Appl. 2025, 269, 126420. [Google Scholar] [CrossRef]
- Liu, P.; Zhao, S.; Kang, L.; Yin, Y. CNN intelligent diagnosis method for bearing incipient faint faults based on adaptive stochastic resonance-wave peak cross correlation sliding sampling. Digit. Signal Process. 2025, 156 Pt B, 104871. [Google Scholar] [CrossRef]
- Tang, H.; Li, Z.; Zhang, D.; He, S.; Tang, J. Divide-and-Conquer: Confluent Triple-Flow Network for RGB-T Salient Object Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2025, 47, 1958–1974. [Google Scholar] [CrossRef]
- Wang, X.; Mao, D.; Li, X. Bearing fault diagnosis based on vibro-acoustic data fusion and 1D-CNN network. Measurement 2021, 173, 108518. [Google Scholar] [CrossRef]
- Luo, W.; Li, J.; Song, M.; Wen, J. Fault diagnosis of high-speed rolling bearings based on multi-feature fusion fuzzy c-means. Digit. Signal Process. 2025, 159, 105011. [Google Scholar] [CrossRef]
- Cheng, Y.; Hu, K.; Wu, J.; Zhu, H.; Shao, X. A convolutional neural network based degradation indicator construction and health prognosis using bidirectional long short-term memory network for rolling bearings. Adv. Eng. Inform. 2021, 48, 101247. [Google Scholar] [CrossRef]
- Zhu, G.; Zhu, Z.; Xiang, L.; Hu, A.; Xu, Y. Prediction of bearing remaining useful life based on DACN-ConvLSTM model. Measurement 2023, 211, 112600. [Google Scholar] [CrossRef]
- Lv, K.; Jiang, H.; Fu, S.; Du, T.; Jin, X.; Fan, X. A predictive analytics framework for rolling bearing vibration signal using deep learning and time series techniques. Comput. Electr. Eng. 2024, 117, 109314. [Google Scholar] [CrossRef]
- Yin, A.; Yan, Y.; Zhang, Z.; Cao, Y. Fault diagnosis of wind turbine gearbox based on the optimized lstm neural network with cosine loss. Sensors 2020, 20, 2339. [Google Scholar] [CrossRef] [PubMed]
- Chen, R.; Chen, S.; He, M.; Zhu, X.; Yang, J. Rolling bearing fault severity identification using deep sparse auto-encoder network with noise added sample expansion. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2017, 231, 666–679. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | DilationNet | DeepConvNet1D | ResNet1D | InceptionNet1D | 1D-DRCNN |
|---|---|---|---|---|---|
| Accuracy (%) | 95.5 | 91.5 | 95.33 | 95.17 | 97.33 |
| Kernel Size | Dilation | Accuracy | Precision | Recall | F1 Score |
|---|---|---|---|---|---|
| 8 | 1 | 0.9767 | 0.9785 | 0.9774 | 0.9780 |
| 8 | 2 | 0.9767 | 0.9770 | 0.9767 | 0.9768 |
| 8 | 4 | 0.9800 | 0.9812 | 0.9801 | 0.9806 |
| 16 | 1 | 0.9800 | 0.9806 | 0.9801 | 0.9804 |
| 16 | 2 | 0.9783 | 0.9787 | 0.9782 | 0.9784 |
| 16 | 4 | 0.9783 | 0.9786 | 0.9787 | 0.9787 |
| 32 | 1 | 0.9850 | 0.9854 | 0.9853 | 0.9853 |
| 32 | 2 | 0.9867 | 0.9870 | 0.9869 | 0.9870 |
| 32 | 4 | 0.9717 | 0.9720 | 0.9725 | 0.9723 |
| 64 | 1 | 0.9725 | 0.9719 | 0.9731 | 0.9725 |
| 64 | 2 | 0.9700 | 0.9693 | 0.9708 | 0.9700 |
| 64 | 4 | 0.9658 | 0.9660 | 0.9642 | 0.9651 |
| Input Size | Accuracy | Precision | Recall | F1 Score |
|---|---|---|---|---|
| 1 × 1000 | 0.9817 | 0.9797 | 0.9714 | 0.9706 |
| 2 × 500 | 0.9783 | 0.9669 | 0.9657 | 0.9663 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Wu, H.; Cheng, G.; Zhou, H.; Pang, Y. Rolling Bearing Degradation Identification Method Based on Improved Monopulse Feature Extraction and 1D Dilated Residual Convolutional Neural Network. Sensors 2025, 25, 4299. https://doi.org/10.3390/s25144299
Liu C, Wu H, Cheng G, Zhou H, Pang Y. Rolling Bearing Degradation Identification Method Based on Improved Monopulse Feature Extraction and 1D Dilated Residual Convolutional Neural Network. Sensors. 2025; 25(14):4299. https://doi.org/10.3390/s25144299
Chicago/Turabian StyleLiu, Chang, Haiyang Wu, Gang Cheng, Hui Zhou, and Yusong Pang. 2025. "Rolling Bearing Degradation Identification Method Based on Improved Monopulse Feature Extraction and 1D Dilated Residual Convolutional Neural Network" Sensors 25, no. 14: 4299. https://doi.org/10.3390/s25144299
APA StyleLiu, C., Wu, H., Cheng, G., Zhou, H., & Pang, Y. (2025). Rolling Bearing Degradation Identification Method Based on Improved Monopulse Feature Extraction and 1D Dilated Residual Convolutional Neural Network. Sensors, 25(14), 4299. https://doi.org/10.3390/s25144299