


New Possibilities of Field Data Survey in Forest Road Design
 ,
,  , ,
, , 
Abstract
1. Introduction
- The classical method (using theodolites, levels, and inclinometers);
- The modern method (based on total stations and GNSSs).
2. Materials and Methods
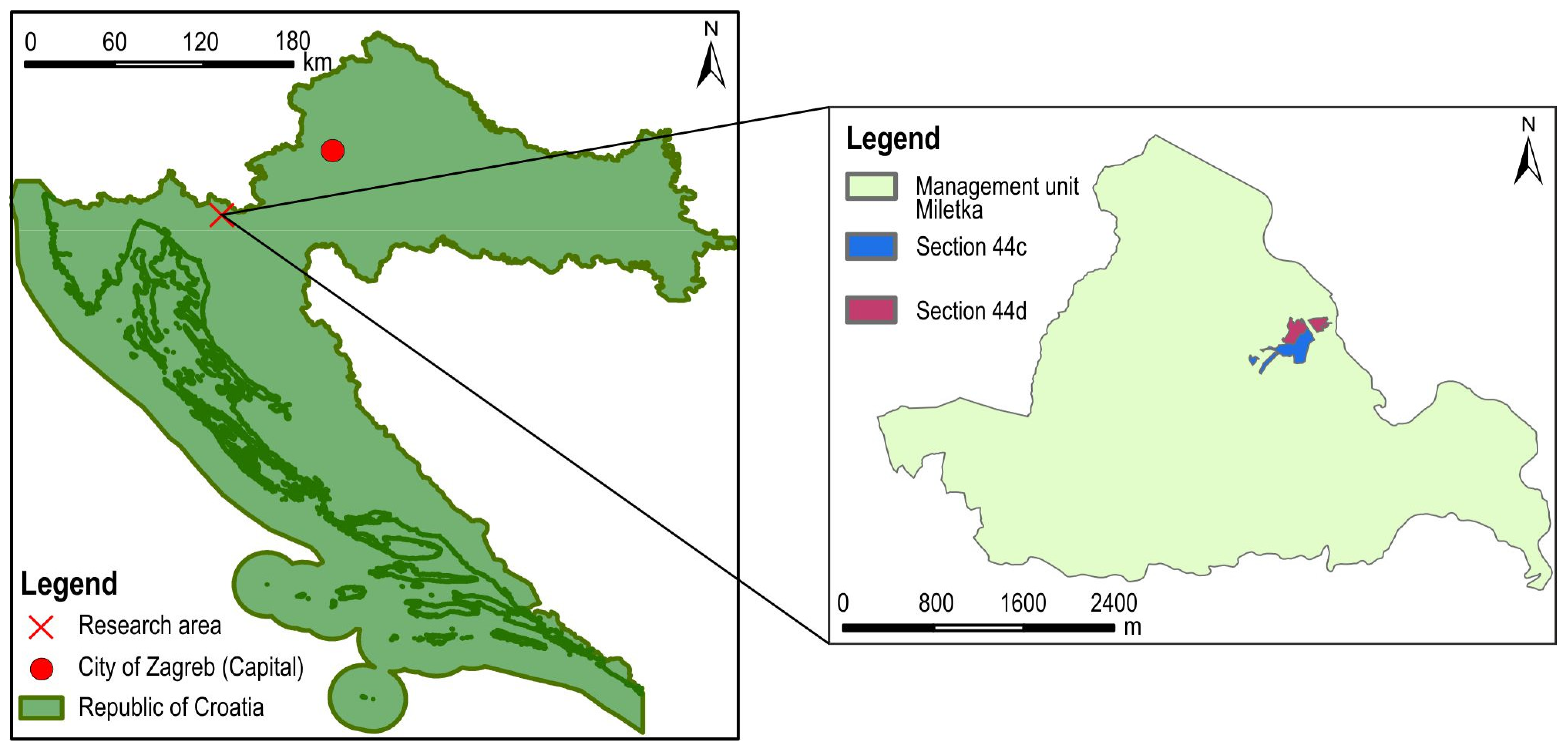
2.1. Research Area
2.2. Data Collection
2.2.1. Classical Method of Measurement

2.2.2. Modern Method of Measurement
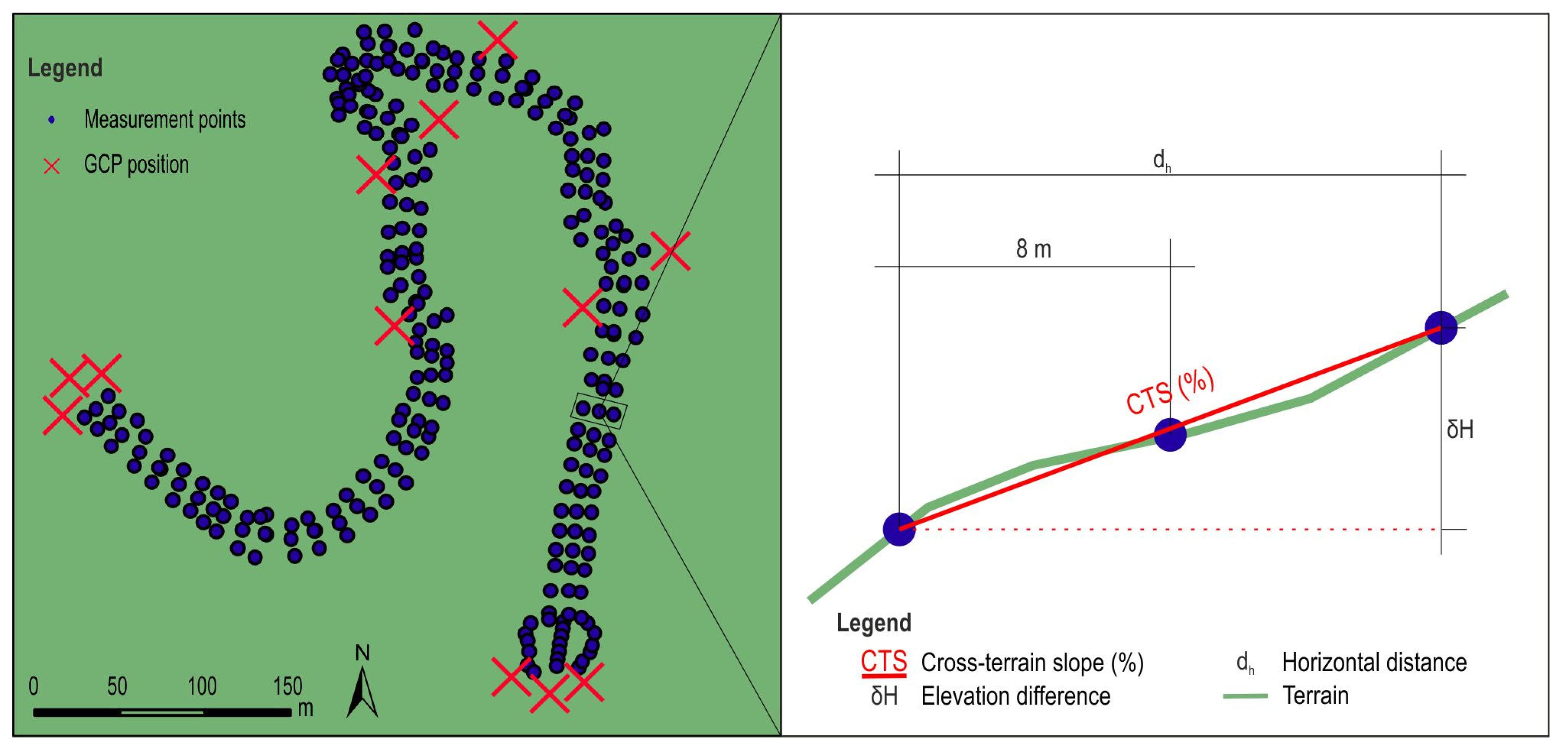
2.2.3. Experimental Method of Measurement
- At a height of 60 m with the terrain follow function disabled (60NF);
- At a height of 70 m with the terrain follow function disabled (70NF);
- At a height of 70 m with terrain follow function enabled (70F);
- At a height of 90 m with terrain follow function enabled (90F).
2.3. Data Processing
- 60NF digital terrain model (DTM60NF);
- 70NF digital terrain model (DTM70NF);
- 70F digital terrain model (DTM70F);
- 90F digital terrain model (DTM90F).
3. Results
4. Discussion
5. Conclusions
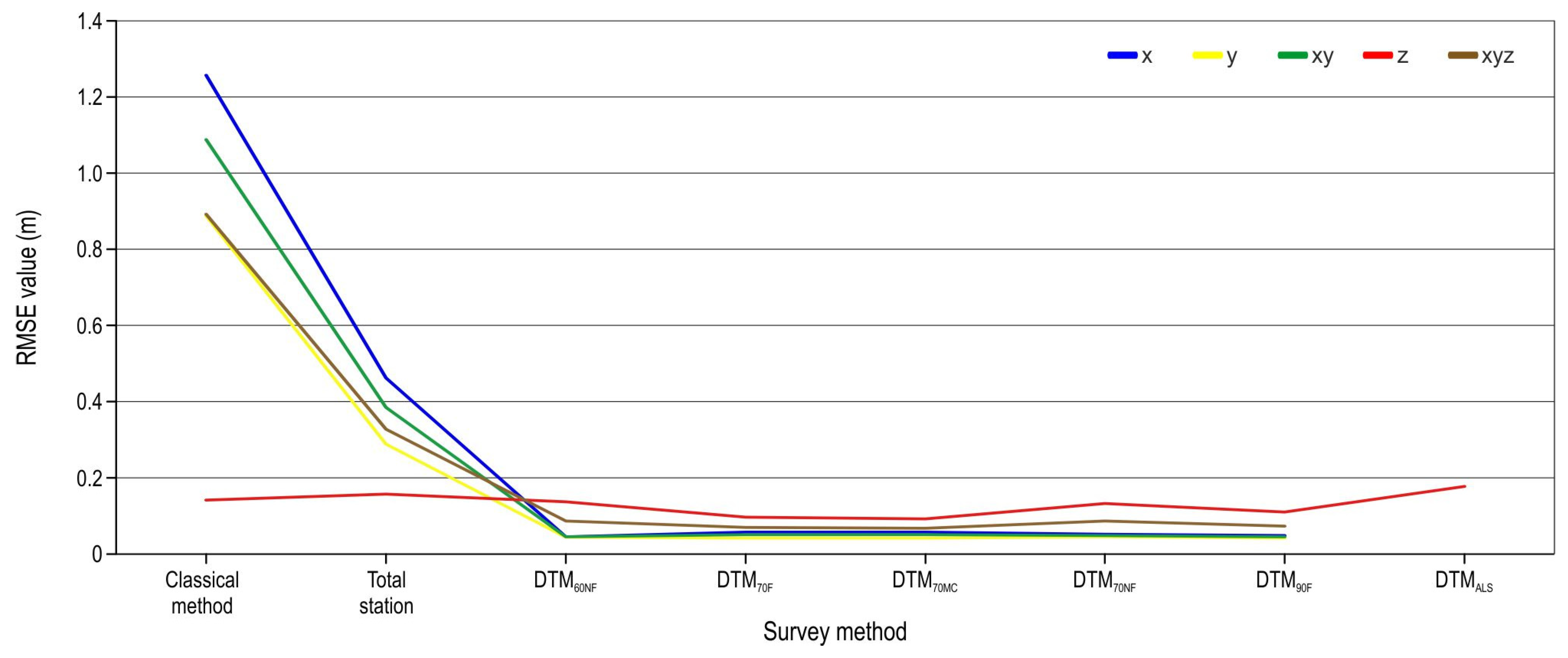
- At field points with higher stations, values recorded using the classical survey method (with a theodolite and a level) and a total station show an accumulation of errors due to an increased number of changes in the instrument position. By reducing the number of instrument stations, errors can be reduced. Unfortunately, in forest conditions and when surveying complex terrains, this condition cannot always be met.
- The UAV SfM provides data with high spatial accuracies. Spatial accuracy is influenced by vegetation, i.e., biomass on the ground. Terrain follow flight image-based DTMs achieve greater spatial accuracy than those without the flight option.
- Although manual classification of point clouds can produce more accurate data, especially using the z coordinate, in some cases, it can also cause less accurate DTMs than the one created based on automatic classifications. Such phenomena have been found in places where most of the point cloud has been erased.
- The ALS survey achieved a higher z-coordinate RMSE compared with that of the UAV SfM survey, even though it has a higher penetration of the tree canopy assembly and vegetation. The ALS z error was strongly influenced by the cross-terrain slope. The authors conclude that the tested lidar data can be used for forest road planning, while their use in design should be examined in further research.
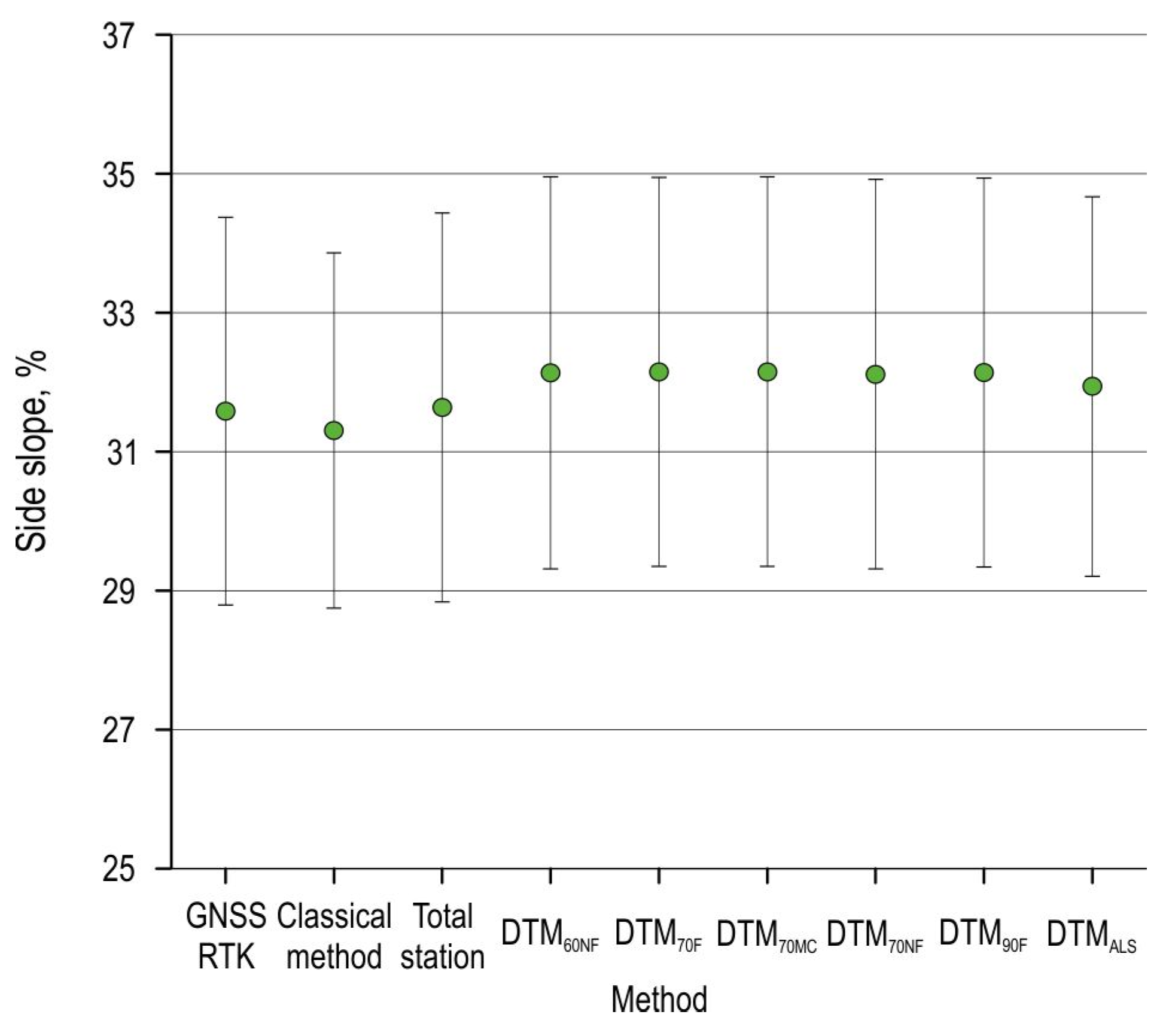
- Although no differences were found between cross-terrain slopes recorded using different survey methods, further analyses and research on the applicability of field data collected via these methods need to be conducted and their impact on other forest road design processes needs to be tested.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ryan, T.; Phillips, H.; Ramsay, J.; Dempsey, J. Forest Road Manual: Guidelines for the Design, Construction and Management of Forest Roads, 1st ed.; COFORD: Dublin, Ireland, 2004. [Google Scholar]
- Motlagh, A.R.; Parsakhoo, A.; Najafi, A.; Mohammadi, J. Development of a Sustainable Maintenance Strategy for Forest Road Wearing Courses in Different Climate Zones. Croat. J. For. Eng. 2024, 45, 139–156. [Google Scholar] [CrossRef]
- Borowski, Z.; Bartoń, K.; Gil, W.; Wójcicki, A.; Pawlak, B. Factors affecting deer pressure on forest regeneration: The roles of forest roads, visibility and forage availability. Pest Manag. Sci. 2021, 77, 628–634. [Google Scholar] [CrossRef]
- Siqueira-Gay, J.; Sonter, L.J.; Sánchez, L.E. Exploring potential impacts of mining on forest loss and fragmentation within a biodiverse region of Brazil’s northeastern Amazon. Resour. Policy 2020, 67, 101662. [Google Scholar] [CrossRef]
- Cavalli, R.; Grigolato, S. Influence of characteristics and extension of a forest road network on the supply cost of forest woodchips. J. For. Res. 2010, 15, 202–209. [Google Scholar] [CrossRef]
- Akay, A.E.; Sessions, J. Applying the decision support system, TRACER, to forest road design. West. J. Appl. For. 2005, 20, 184–191. [Google Scholar] [CrossRef]
- Pentek, T.; Pičman, D.; Nevečerel, H. Environmental-ekological component of forest road planning and designing. In Proceedings of the International Scientific Conference: “Forest Constructions and Ameliorations in Relation to the Natural Environment”, Zvolen, Slovakia, 16–17 September 2004; pp. 94–102. [Google Scholar]
- Aricak, B. Using remote sensing data to predict road fill areas and areas affected by fill erosion with planned forest road construction: A case study in Kastamonu Regional Forest Directorate (Turkey). Environ. Monit. Assess. 2015, 187, 417. [Google Scholar] [CrossRef]
- Papa, I.; Pentek, T.; Janeš, D.; Šerić, T.; Vusić, D.; Đuka, A. Usporedba podataka prikupljenih različitim metodama terenske izmjere pri rekonstrukciji šumske ceste. Nova Meh. šumarstva Časopis Za Teor. I Praksu šumarskoga Inženjerstva 2017, 38, 1–14. Available online: https://hrcak.srce.hr/file/283593 (accessed on 15 May 2025).
- Gill, S.; Aryan, A. To experimental study for comparison theodolite and total station. Int. J. Eng. Res. Sci. 2016, 2, 153–160. Available online: https://ijoer.com/assets/articles_menuscripts/file/IJOER-MAR-2016-44.pdf (accessed on 14 May 2025).
- Chekole, S.D. Surveying with GPS, Total Station and Terresterial Laser Scaner: A Comparative Study. Master’s Thesis, Royal Institute of Technology (KTH), Stockholm, Sweden, May 2014. [Google Scholar] [CrossRef]
- Rick, J.W.; Varela, S.L.L. Total station. In The Encyclopedia of Archaeological Sciences; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2018; pp. 1–3. [Google Scholar] [CrossRef]
- Lasić, Z. Praktični rad s Geodetskim Instrumentima. In Interna Skripta; Sveučilište u Zagrebu, Geodetski Fakultet: Zagreb, Croatia, 2008; Available online: http://www2.geof.unizg.hr/~zlasic/Prakticni_rad_s_geodetskim_instrumentima.pdf (accessed on 14 May 2025).
- Gopi, S. Advanced Surveying: Total Station, GIS and Remote Sensing; Pearson Education India: Tamil Nadu, India, 2007; pp. 211–212. [Google Scholar]
- Hussein, S.K.; Abdulla, K.Y. Surveying with GNSS and total station: A comparative study. Eurasian J. Sci. Eng. 2021, 7, 59–73. [Google Scholar] [CrossRef]
- Rizos, C. Surveying. In Springer Handbook of Global Navigation Satellite Systems; Springer: Berlin/Heidelberg, Germany, 2017; pp. 1011–1037. [Google Scholar] [CrossRef]
- Šporčić, M.; Landekić, M.; Šušnjar, M.; Pandur, Z.; Bačić, M.; Mijoč, D. Shortage of labour force in forestry of Bosnia and Herzegovina–forestry experts’ opinions on recruiting and retaining forestry workers. Croat. J. For. Eng. 2024, 45, 183–198. [Google Scholar] [CrossRef]
- Šporčić, M.; Landekić, M.; Šušnjar, M.; Pandur, Z.; Bačić, M.; Mijoč, D. Deliberations of Forestry Workers on Current Challenges and Future Perspectives on Their Profession—A Case Study from Bosnia and Herzegovina. Forests 2023, 14, 817. [Google Scholar] [CrossRef]
- Juricic, B.B.; Galic, M.; Marenjak, S. Review of the Construction Labour Demand and Shortages in the EU. Buildings 2021, 11, 17. [Google Scholar] [CrossRef]
- Cho, H.M.; Park, J.W.; Lee, J.S.; Han, S.K. Assessment of the GNSS-RTK for application in precision forest operations. Remote Sens. 2023, 16, 148. [Google Scholar] [CrossRef]
- Bettinger, P.; Merry, K.; Bayat, M.; Tomaštík, J. GNSS use in forestry–A multi-national survey from Iran, Slovakia and southern USA. Comput. Electron. Agric. 2019, 158, 369–383. [Google Scholar] [CrossRef]
- Luo, X.; Schaufler, S.; Branzanti, M.; Chen, J. Assessing the benefits of Galileo to high-precision GNSS positioning–RTK, PPP and post-processing. Adv. Space Res. 2021, 68, 4916–4931. [Google Scholar] [CrossRef]
- Feng, Y.; Wang, J. PS RTK performance characteristics and analysis. Positioning 2008, 1, 1–8. [Google Scholar] [CrossRef]
- Lee, T.; Bettinger, P.; Merry, K.; Cieszewski, C. The effects of nearby trees on the positional accuracy of GNSS receivers in a forest environment. PLoS ONE 2023, 18, e0283090. [Google Scholar] [CrossRef]
- Abdi, O.; Uusitalo, J.; Pietarinen, J.; Lajunen, A. Evaluation of Forest Features Determining GNSS Positioning Accuracy of a Novel Low-Cost, Mobile RTK System Using LiDAR and TreeNet. Remote Sens. 2022, 14, 2856. [Google Scholar] [CrossRef]
- Brach, M.; Zasada, M. The effect of mounting height on gnss receiver positioning accuracy in forest conditions. Croat. J. For. Eng. 2014, 35, 245–253. Available online: https://hrcak.srce.hr/file/187588 (accessed on 20 May 2025).
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Yrttimaa, T.; Matsuzaki, S.; Kankare, V.; Junttila, S.; Saarinen, N.; Kukko, A.; Hyyppä, J.; Miura, J.; Vastaranta, M. Assessing Forest Traversability for Autonomous Mobile Systems Using Close-Range Airborne Laser Scanning. Croat. J. For. Eng. 2024, 45, 169–182. [Google Scholar] [CrossRef]
- Gyawali, A.; Aalto, M.; Peuhkurinen, J.; Villikka, M.; Ranta, T. Comparison of individual tree height estimated from LiDAR and digital aerial photogrammetry in young forests. Sustainability 2022, 14, 3720. [Google Scholar] [CrossRef]
- Goodbody, T.R.; Coops, N.C.; Hermosilla, T.; Tompalski, P.; Crawford, P. Assessing the status of forest regeneration using digital aerial photogrammetry and unmanned aerial systems. Int. J. Remote Sens. 2018, 39, 5246–5264. [Google Scholar] [CrossRef]
- Aicardi, I.; Dabove, P.; Lingua, A.M.; Piras, M. Integration between TLS and UAV photogrammetry techniques for forestry applications. iForest 2016, 10, 41. [Google Scholar] [CrossRef]
- Carson, W.W.; Andersen, H.E.; Reutebuch, S.E.; McGaughey, R.J. LiDAR applications in forestry—An overview. In Proceedings of the ASPRS Annual Conference, Denver, CO, USA, 23–28 May 2004; pp. 1–9. [Google Scholar]
- Papa, I.; Popović, M.; Hodak, L.; Đuka, A.; Pentek, T.; Hikl, M.; Lovrinčević, M. Water and Vegetation as a Source of UAV Forest Road Cross-Section Survey Error. Forests 2025, 16, 507. [Google Scholar] [CrossRef]
- Miller, Z.M.; Hupy, J.; Chandrasekaran, A.; Shao, G.; Fei, S. Application of postprocessing kinematic methods with UAS remote sensing in forest ecosystems. J. For. 2021, 119, 454–466. [Google Scholar] [CrossRef]
- Padró, J.C.; Muñoz, F.J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. Int. J. Appl. Earth Obs. Geoinf. 2019, 75, 130–140. [Google Scholar] [CrossRef]
- Zhang, H.; Aldana-Jague, E.; Clapuyt, F.; Wilken, F.; Vanacker, V.; Van Oost, K. Evaluating the potential of post-processing kinematic (PPK) georeferencing for UAV-based structure-from-motion (SfM) photogrammetry and surface change detection. Earth Syst. Dyn. 2019, 7, 807–827. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Surový, P.; Grznárová, A.; Merganič, J. UAV RTK/PPK method—An optimal solution for mapping inaccessible forested areas? Remote Sens. 2019, 11, 721. [Google Scholar] [CrossRef]
- Stöcker, C.; Nex, F.; Koeva, M.; Gerke, M. Quality assessment of combined IMU/GNSS data for direct georeferencing in the context of UAV-based mapping. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 355–361. [Google Scholar] [CrossRef]
- Dhruva, A.; Hartley, R.J.; Redpath, T.A.; Estarija, H.J.C.; Cajes, D.; Massam, P.D. Effective UAV Photogrammetry for Forest Management: New Insights on Side Overlap and Flight Parameters. Forests 2024, 15, 2135. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from motion photogrammetry in forestry: A review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Lepoglavec, K.; Šušnjar, M.; Pandur, Z.; Bačić, M.; Kopseak, H.; Nevečerel, H. Correct Calculation of the Existing Longitudinal Profile of a Forest/Skid Road Using GNSS and a UAV Device. Forests 2023, 14, 751. [Google Scholar] [CrossRef]
- Tamimi, R.; Toth, C. Accuracy Assessment of UAV LiDAR Compared to Traditional Total Station for Geospatial Data Collection in Land Surveying Contexts. ISPRS Ann. Photogramm. Remote Sens. Spat. 2024, 48, 421–426. [Google Scholar] [CrossRef]
- Elaksher, A.; Ali, T.; Alharthy, A. A quantitative assessment of LiDAR data accuracy. Remote Sens. 2023, 15, 442. [Google Scholar] [CrossRef]
- Liu, X. A new framework for accuracy assessment of LIDAR-derived digital elevation models. ISPRS Ann. Photogramm. Remote Sens. Spat. 2022, 4, 67–73. [Google Scholar] [CrossRef]
- Schmelz, W.J.; Psuty, N.P. Quantification of airborne lidar accuracy in coastal dunes (Fire island, New York). Photogramm. Eng. Remote Sens. 2019, 85, 133–144. [Google Scholar] [CrossRef]
- Kweon, H.; Seo, J.I.; Lee, J.W. Assessing the applicability of mobile laser scanning for mapping forest roads in the republic of Korea. Remote Sens. 2020, 12, 1502. [Google Scholar] [CrossRef]
- Sokolović, D.; Bajrić, M. Volumen zemljanih radova pri izgradnji šumskih cesta na strmim terenima. Nova Meh. Šumarstva: Časopis Za Teor. I Praksu Šumarskoga Inženjerstva 2015, 36, 33–42. Available online: https://hrcak.srce.hr/file/227355 (accessed on 20 May 2025).
- Papa, I.; Picchio, R.; Lovrinčević, M.; Janeš, D.; Pentek, T.; Validžić, D.; Venanzi, R.; Đuka, A. Factors Affecting Earthwork Volume in Forest Road Construction on Steep Terrain. Land 2023, 12, 400. [Google Scholar] [CrossRef]
- Mellgren, P.G. Terrain Classification for Canadian Forestry; FERIC, Canadian Pulp and Paper Association: Montreal, QC, Canada, 1980; pp. 1–13. [Google Scholar]
- Šikić, D.; Babić, B.; Topolnik, D.; Knežević, I.; Božičević, D.; Švabe, Ž.; Piria, I.; Sever, S. Tehnički Uvjeti za Gospodarske Ceste, 1st ed.; Znanstveni Savjet za Promet Jugoslavenske Akademije Znanosti i Umjetnosti: Zagreb, Croatia, 1989; pp. 1–78. [Google Scholar]
- Anonymous. Pravilnik o provedbi intervencije 73.08. “Izgradnja šumske infrastructure”. In iz Strateškog Plana Zajedničke Poljoprivredne Politike Republike Hrvatske 2023–2027; NN 90/2024; Government of Croatia: Zagreb, Croatia, 2024; Available online: https://narodne-novine.nn.hr/clanci/sluzbeni/full/2024_07_90_1681.html (accessed on 12 June 2025).
- Pičman, D. Šumske Prometnice; Šumarski fakultet Sveučilišta u Zagrebu: Zagreb, Croatia; Hrvatske šume: Zagreb, Croatia, 2007; pp. 144–147. [Google Scholar]
- CROPOS—Državna Mreža Referentnih Stanica Republike Hrvatske. Available online: https://www.cropos.hr/ (accessed on 15 May 2025).
- Mihelič, J.; Robek, R.; Kobal, M. Determining bulk factors for three subsoils used in forest engineering in Slovenia. Croat. J. For. Eng. 2022, 43, 303–311. [Google Scholar] [CrossRef]
- Anonymous. Specifikacija Proizvoda, LiDAR Snimanje iz Zraka; Republika Hrvatska—Državna geodetska uprava: Zagreb, Croatia, 2022; pp. 1–50. Available online: https://dgu.gov.hr/UserDocsImages/dokumenti/Istaknute%20teme/Multisenzorno%20snimanje/LiDAR%20snimanje%20iz%20zraka.pdf (accessed on 12 June 2025).
- Chaddock, R.E. Principles and Methods of Statistics, 1st ed.; Houghton Miffin Company: Boston, MA, USA; The Riverside Press: Cambridge, UK, 1925; pp. 248–303. [Google Scholar]
- Hasegawa, H.; Sujaswara, A.A.; Kanemoto, T.; Tsubota, K. Possibilities of Using UAV for Estimating Earthwork Volumes during Process of Repairing a Small-Scale Forest Road, Case Study from Kyoto Prefecture, Japan. Forests 2023, 14, 677. [Google Scholar] [CrossRef]
- Tomaštík, J.; Mokroš, M.; Saloň, Š.; Chudý, F.; Tunák, D. Accuracy of photogrammetric UAV-based point clouds under conditions of partially-open forest canopy. Forests 2017, 8, 151. [Google Scholar] [CrossRef]
- Duran, Z.; Ozcan, K.; Atik, M.E. Classification of photogrammetric and airborne lidar point clouds using machine learning algorithms. Drones 2021, 5, 104. [Google Scholar] [CrossRef]
- Dianovský, R.; Pecho, P.; Veľký, P.; Hrúz, M. Electromagnetic radiation from high-voltage transmission lines: Impact on uav flight safety and performance. Transp. Res. Procedia 2023, 75, 209–218. [Google Scholar] [CrossRef]
- Cățeanu, M.; Ciubotaru, A. The effect of lidar sampling density on DTM accuracy for areas with heavy forest cover. Forests 2021, 12, 265. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of forest structure using two UAV techniques: A comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- White, J.C.; Wulder, M.A.; Vastaranta, M.; Coops, N.C.; Pitt, D.; Woods, M. The utility of image-based point clouds for forest inventory: A comparison with airborne laser scanning. Forests 2013, 4, 518–536. [Google Scholar] [CrossRef]
- Tinkham, W.T.; Smith, A.M.; Hoffman, C.; Hudak, A.T.; Falkowski, M.J.; Swanson, M.E.; Gessler, P.E. Investigating the influence of LiDAR ground surface errors on the utility of derived forest inventories. Can. J. For. Res. 2012, 42, 413–422. [Google Scholar] [CrossRef]
- Su, J.; Bork, E. Influence of vegetation, slope, and lidar sampling angle on DEM accuracy. Photogramm. Eng. Remote Sens. 2006, 72, 1265–1274. [Google Scholar] [CrossRef]
- Murgaš, V.; Sačkov, I.; Sedliak, M.; Tunák, D.; Chudý, F. Assessing horizontal accuracy of inventory plots in forests with different mix of tree species composition and development stage. J. For. Sci. 2018, 64, 478–485. [Google Scholar] [CrossRef]
- Crespo-Peremarch, P.; Torralba, J.; Carbonell-Rivera, J.P.; Ruiz, L.A. Comparing the generation of DTM in a forest ecosystem using TLS, ALS and UAV-DAP, and different software tools. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, 43, 575–582. [Google Scholar] [CrossRef]
- Jurjević, L.; Gašparović, M.; Liang, X.; Balenović, I. Assessment of Close-Range Remote Sensing Methods for DTM Estimation in a Lowland Deciduous Forest. Remote Sens. 2021, 13, 2063. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 60NF | 70NF | 70F | 90F | |
|---|---|---|---|---|
| Flight altitude | 60 m | 70 m | 70 m | 90 m |
| Terrain follow | No | No | Yes | Yes |
| Number of aerial photographs | 827 | 666 | 692 | 414 |
| Front/side overlap | 80/80% | 80/80% | 80/80% | 80/80% |
| Area | 24.20 ha | 26.54 ha | 27.89 ha | 29.64 ha |
| GSD * | 2.32 [cm/pixel] | 2.66 [cm/pixel] | 2.28 [cm/pixel] | 2.86 [cm/pixel] |
| DTM resolution | 5 × GSD (2.32 [cm/pixel]) | 5 × GSD (2.66 [cm/pixel]) | 5 × GSD (2.28 [cm/pixel]) | 5 × GSD (2.86 [cm/pixel]) |
| Processing time (total) | 6 h 22 min | 4 h 42 min | 5 h 54 min | 4 h 22 min |
| Survey Method | Centerline Length (m) | Elevation Difference (m) Between First and Last IPs | Average Longitudinal Terrain Slope (%) |
|---|---|---|---|
| GNSS | 879.42 | 66.50 | 7.56 |
| Classical | 880.51 | 66.70 | 7.57 |
| Total station | 879.39 | 66.74 | 7.59 |
| DTM60NF | 879.44 | 66.42 | 7.55 |
| DTM70F | 879.48 | 66.46 | 7.56 |
| DTM70MC | 879.48 | 66.45 | 7.56 |
| DTM70NF | 879.55 | 66.37 | 7.55 |
| DTM90F | 879.53 | 66.49 | 7.56 |
| Coordinate | Classical Method (m) | Total Station (m) | DTM60NF (m) | DTM70F (m) | DTM70MC (m) | DTM70NF (m) | DTM90F (m) | DTMALS (m) * |
|---|---|---|---|---|---|---|---|---|
| x | 1.72 | 0.45 | 0.10 | 0.10 | 0.10 | 0.11 | 0.12 | / |
| y | 1.58 | 0.28 | 0.09 | 0.09 | 0.09 | 0.09 | 0.09 | / |
| z | 0.47 | 0.15 | 0.22 | 0.20 | 0.19 | 0.21 | 0.20 | 0.24 |
| GNSS | Classical | Total Station | DTM60NF | DTM70F | DTM70MC | DTM70NF | DTM90F | DTMALS | |
|---|---|---|---|---|---|---|---|---|---|
| Average (%) | 31.58 | 31.31 | 31.64 | 32.13 | 32.15 | 32.15 | 32.11 | 32.13 | 31.94 |
| Max (%) | 58.96 | 57.69 | 59.23 | 58.80 | 58.76 | 58.75 | 59.25 | 59.20 | 63.01 |
| Min (%) | 1.14 | 2.19 | 0.89 | 1.11 | 1.25 | 1.30 | 1.39 | 1.58 | 3.23 |
| Median (%) | 28.12 | 27.56 | 28.08 | 28.83 | 28.84 | 29.00 | 28.90 | 28.85 | 28.66 |
| RMSE (%) | / | 3.12 | 0.27 | 1.87 | 1.80 | 1.77 | 1.81 | 1.81 | 2.11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lovrinčević, M.; Papa, I.; Janeš, D.; Hodak, L.; Pentek, T.; Đuka, A. New Possibilities of Field Data Survey in Forest Road Design. Sensors 2025, 25, 4192. https://doi.org/10.3390/s25134192
Lovrinčević M, Papa I, Janeš D, Hodak L, Pentek T, Đuka A. New Possibilities of Field Data Survey in Forest Road Design. Sensors. 2025; 25(13):4192. https://doi.org/10.3390/s25134192
Chicago/Turabian StyleLovrinčević, Mihael, Ivica Papa, David Janeš, Luka Hodak, Tibor Pentek, and Andreja Đuka. 2025. "New Possibilities of Field Data Survey in Forest Road Design" Sensors 25, no. 13: 4192. https://doi.org/10.3390/s25134192
APA StyleLovrinčević, M., Papa, I., Janeš, D., Hodak, L., Pentek, T., & Đuka, A. (2025). New Possibilities of Field Data Survey in Forest Road Design. Sensors, 25(13), 4192. https://doi.org/10.3390/s25134192