

Electromyography Signal Acquisition, Filtering, and Data Analysis for Exoskeleton Development

 , , ,
, , ,  ,
,  and
and
Abstract
1. Introduction
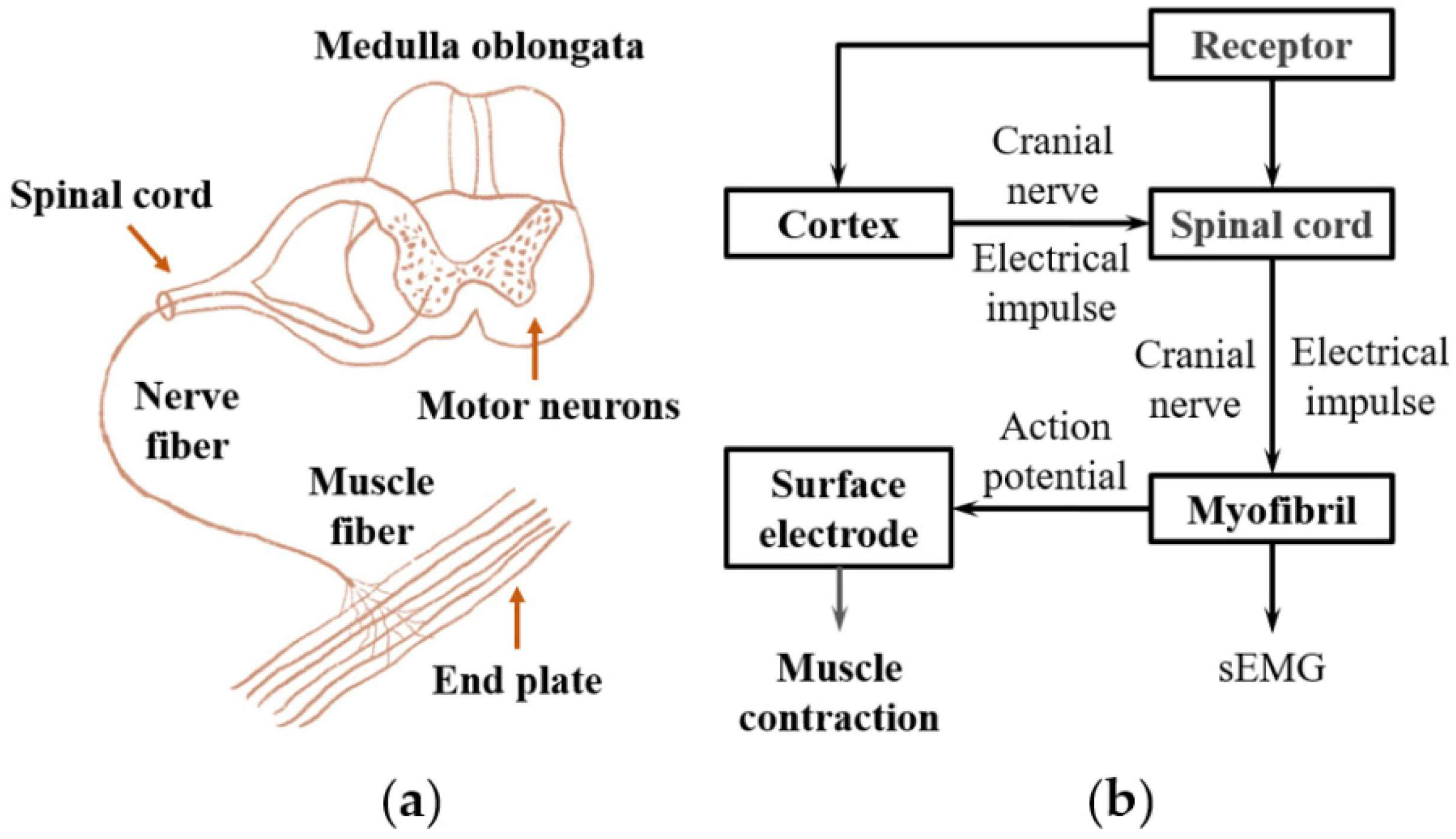
2. EMG Signal Acquisition for Exoskeletons
2.1. Types of EMG Signals
- Surface Electromyography (sEMG)
- Intramuscular Electromyography (iEMG)
- High-Density Surface Electromyography (HD-sEMG)
- Electroneurography (ENG)
2.1.1. Surface EMG (sEMG)
2.1.2. Intramuscular EMG (iEMG)
2.1.3. High-Density Surface EMG (HD-sEMG)
2.1.4. Electroneurography
2.2. EMG Sensor Technologies for Exoskeleton Control
2.2.1. Surface Electrode Technologies
2.2.2. Intramuscular (Invasive) Electrodes
2.2.3. Wearable and Flexible EMG Devices
2.2.4. Hybrid EMG Sensors
2.3. Noise and Artifacts in EMG Signals
2.3.1. Motion Artifacts
2.3.2. Power-Line Interference (PLI)
2.3.3. Crosstalk from Adjacent Muscles
3. EMG Signal Processing: Filtering and Preprocessing
3.1. Traditional Filtering Methods
3.2. Advanced Noise Reduction Techniques
3.2.1. Wavelet Transform (WT)
3.2.2. Empirical Mode Decomposition (EMD)
3.2.3. Kalman Filtering and Adaptive Filtering
3.3. Noise Reduction Challenges in Exoskeleton-Based EMG Systems
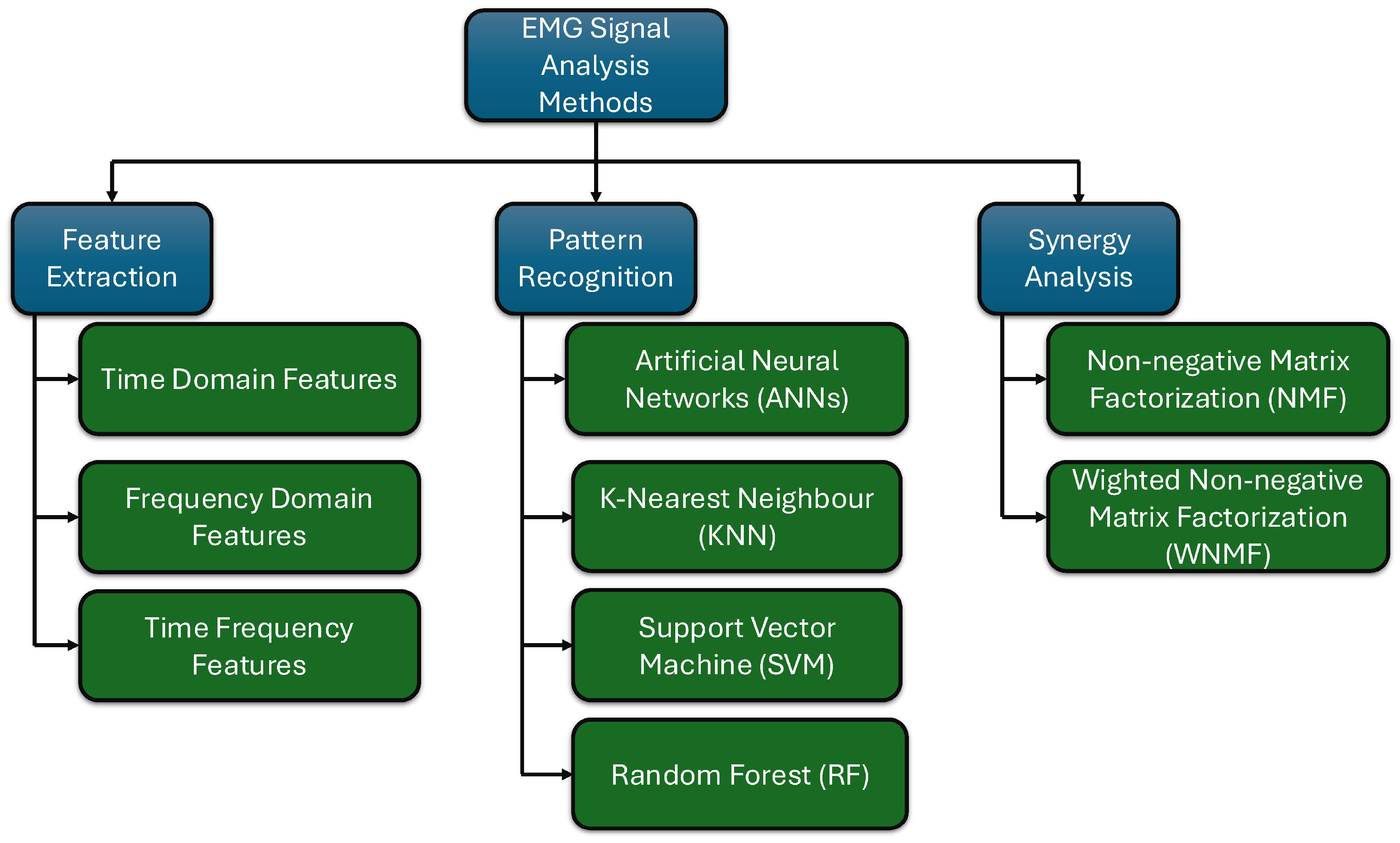
4. EMG Signal Analysis Methods for Exoskeleton Control
4.1. Feature Extraction Techniques
4.1.1. Time-Domain Features
4.1.2. Frequency-Domain Features
4.1.3. Time-Frequency Features
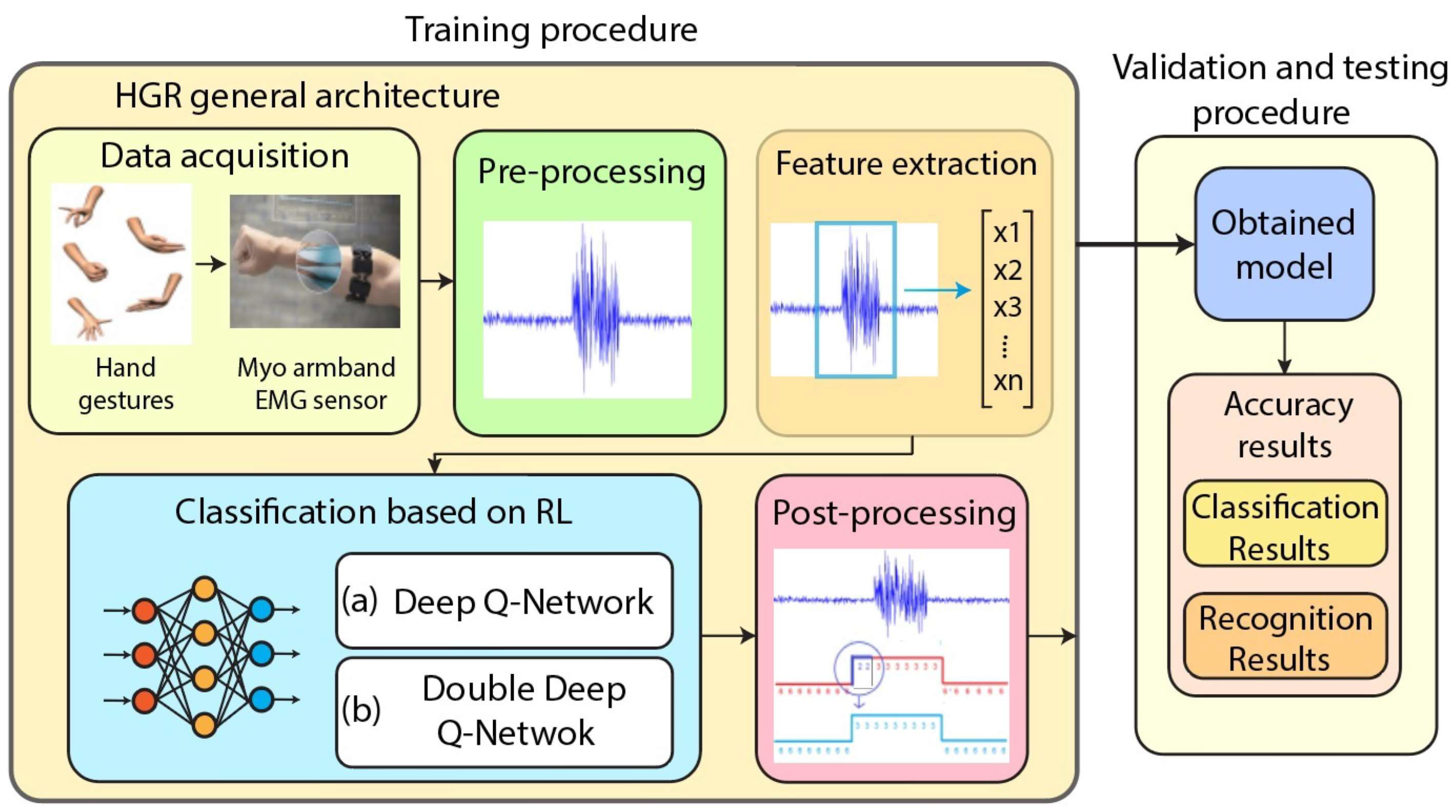
4.2. EMG Pattern Recognition for Motion Control
4.3. Muscle Synergy Analysis for Exoskeleton Control
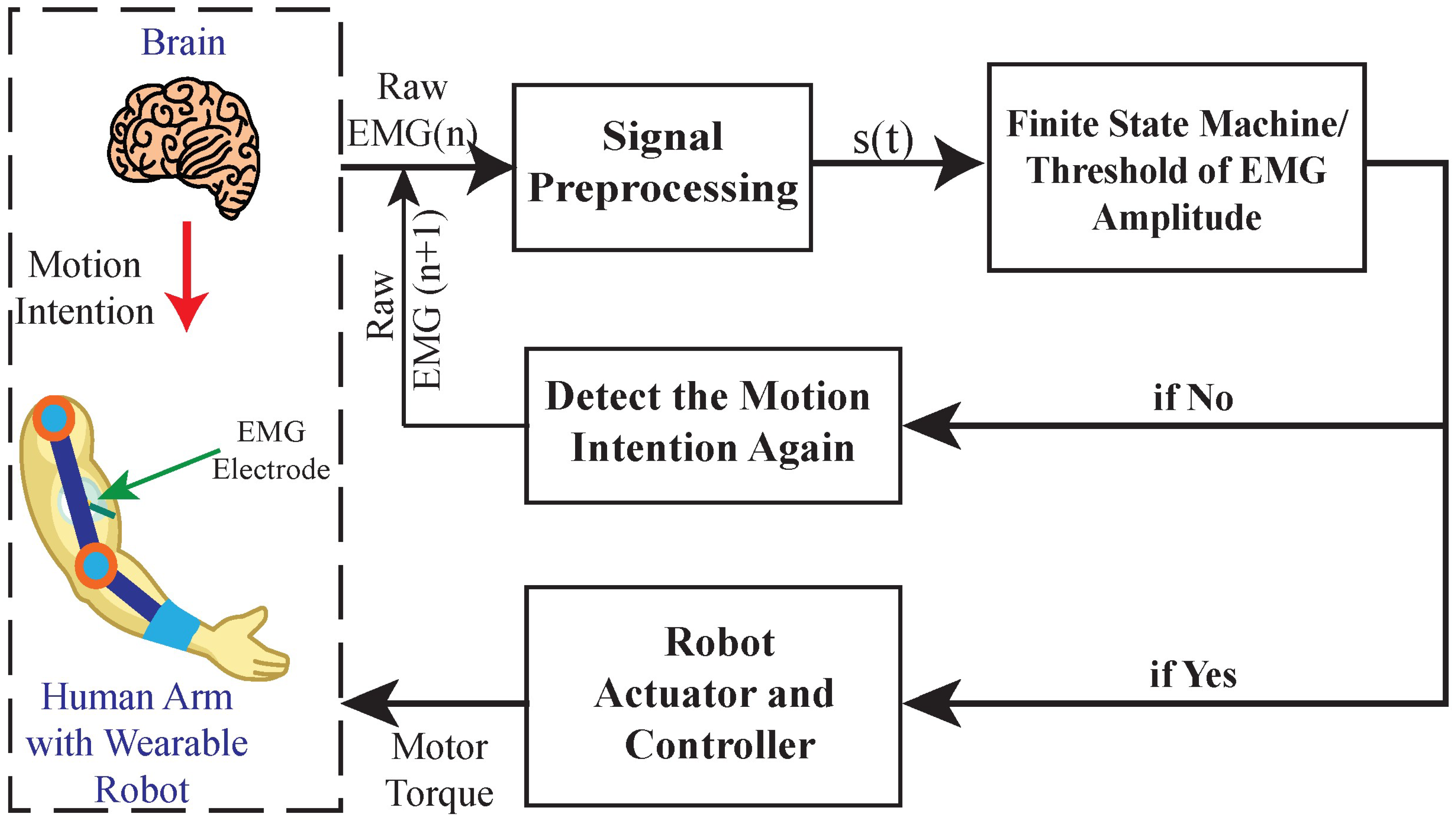
5. Application of EMG in Exoskeleton Development
5.1. EMG-Based Control Strategies
5.1.1. Threshold-Based Control
5.1.2. Pattern Recognition-Based Control
5.1.3. Hybrid Control Strategies
5.2. Real-Time Processing Challenges
5.2.1. Computational Latency and Hardware Constraints
5.2.2. Adaptive Calibration for User-Specific Variations
5.3. Personalized and Adaptive Exoskeleton Control
5.3.1. AI-Driven Adaptive Controllers
5.3.2. Muscle Fatigue Compensation Techniques
5.4. Limitations of EMG Only Control Compared to Multimodal Biosensing Approaches
5.4.1. Signal Variability and Instability
5.4.2. Lack of Contextual Awareness
5.4.3. Decreased Performance Under Fatigue or Impairment
5.4.4. Susceptibility to Noise and Crosstalk
5.4.5. Limited Resolution and Low Intent Classification
5.5. Benefits of Integrating Edge Computing in Wearable EMG Systems for Home Monitoring
5.5.1. Minimization of Response Delays and Improvement of Real-Time Performance
5.5.2. Enhancement of Data Privacy and Security
5.5.3. Reduction in Power and Communication Overhead
5.5.4. Capability for Adaptive Local Signal Processing
5.5.5. Enabling Instantaneous Feedback and Personalized Assistance
5.6. Enhancing Muscle Fatigue Compensation via Bioimpedance-Integrated EMG Systems
5.7. Optimizing Adaptive Calibration Using Multimodal Biofeedback
5.8. Inclusion of Additional Bioelectric Modalities to Improve Gesture Recognition Accuracy in Noisy Environments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Preethichandra, D.M.G.; Piyathilaka, L.; Sul, J.-H.; Izhar, U.; Samarasinghe, R.; Arachchige, S.D.; and de Silva, L.C. Passive and Active Exoskeleton Solutions: Sensors, Actuators, Applications, and Recent Trends. Sensors 2024, 24, 7095. [Google Scholar] [CrossRef]
- Arachchige, S.D.; Piyathilaka, L.; Sul, J.-H.; Preethichandra, D.M.G. A Review of Potential Exoskeletons for the Prevention of Work-Related Musculoskeletal Disorders in Agriculture. Sensors 2024, 24, 7026. [Google Scholar] [CrossRef] [PubMed]
- Carvalho, C.R.; Fernández, J.M.; Del-Ama, A.J.; Oliveira Barroso, F.; Moreno, J.C. Review of electromyography onset detection methods for real-time control of robotic exoskeletons. J. Neuroeng. Rehabil. 2023, 20, 141. [Google Scholar] [CrossRef] [PubMed]
- Sadikoglu, F.; Kavalcioglu, C.; Dagman, B. Electromyogram (EMG) signal detection, classification of EMG signals and diagnosis of neuropathy muscle disease. Procedia Comput. Sci. 2017, 120, 422–429. [Google Scholar] [CrossRef]
- Nazari, F.; Mohajer, N.; Nahavandi, D.; Khosravi, A.; Nahavandi, S. Applied Exoskeleton Technology: A Comprehensive Review of Physical and Cognitive Human–Robot Interaction. IEEE Trans. Cogn. Dev. Syst. 2023, 15, 1102–1122. [Google Scholar] [CrossRef]
- da Silva, L.D.L.; Pereira, T.F.; Leithardt, V.R.Q.; Seman, L.O.; Zeferino, C.A. Hybrid Impedance-Admittance Control for Upper Limb Exoskeleton Using Electromyography. Appl. Sci. 2020, 10, 7146. [Google Scholar] [CrossRef]
- Zieliński, G.; Gawda, P. Surface Electromyography in Dentistry-Past, Present and Future. J. Clin. Med. 2024, 13, 1328. [Google Scholar] [CrossRef]
- Zhang, X.; Qu, Y.; Zhang, G.; Wang, Z.; Chen, C.; Xu, X. Review of sEMG for Exoskeleton Robots: Motion Intention Recognition Techniques and Applications. Sensors 2025, 25, 2448. [Google Scholar] [CrossRef]
- Yin, G.; Zhang, X.; Chen, D.; Li, H.; Chen, J.; Chen, C.; Lemos, S. Processing Surface EMG Signals for Exoskeleton Motion Control. Front. Neurorobot. 2020, 14, 40. [Google Scholar] [CrossRef]
- Hamtaei Pour Shirazi, F.; Parsaei, H.; Ashraf, A. A clinical decision support system for diagnosis and severity quantification of lumbosacral radiculopathy using intramuscular electromyography signals. Med. Biol. Eng. Comput. 2025, 63, 239–249. [Google Scholar] [CrossRef]
- Crouch, D.L.; Pan, L.; Filer, W.; Stallings, J.W.; Huang, H. Comparing Surface and Intramuscular Electromyography for Simultaneous and Proportional Control Based on a Musculoskeletal Model: A Pilot Study. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 1735–1744. [Google Scholar] [CrossRef] [PubMed]
- Grison, A.; Mendez Guerra, I.; Clarke, A.K.; Muceli, S.; Ibáñez, J.; Farina, D. Unlocking the full potential of high-density surface EMG: Novel non-invasive high-yield motor unit decomposition. J. Physiol. 2025, 603, 2281–2300. [Google Scholar] [CrossRef] [PubMed]
- Montazerin, M.; Zabihi, S.; Rahimian, E.; Mohammadi, A.; Naderkhani, F. ViT-HGR: Vision Transformer-based Hand Gesture Recognition from High Density Surface EMG Signals. In Proceedings of the 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Glasgow, UK, 11–15 July 2022. [Google Scholar]
- Pei, Y.-C.; Chen, T.-Y.; Hsu, P.-C.; Lin, C.-H.; Huang, J.-J. An electroneurography-based assay for identifying injured nerve segment during surgery: Design and in vivo application in the rat. J. Neural Eng. 2019, 16, 026027. [Google Scholar] [CrossRef] [PubMed]
- Trigili, E.; Grazi, L.; Crea, S.; Accogli, A.; Carpaneto, J.; Micera, S.; Vitiello, N.; Panarese, A. Detection of movement onset using EMG signals for upper-limb exoskeletons in reaching tasks. J. Neuroeng. Rehabil. 2019, 16, 45. [Google Scholar] [CrossRef]
- Thilahar, R.; Manoharan, M.; Sudalai, P.; Sadayan, R.B.; Kaliaraj, G.S. Electromyography (EMG) Signal Acquisition for Exoskeleton Control: Enhancing Precision in Human-Machine Interaction. In Proceedings of the International Conference on Smart Electronics and Communication Systems (ISENSE), Kerala, India, 6–7 December 2024. [Google Scholar]
- Karimi, M.; Ahmadi, M. iLeAD: An EMG-Based Adaptive Shared Control Framework for Exoskeleton Assistance via Deep Reinforcement Learning. IEEE Trans. Artif. Intell. 2025. early access. [Google Scholar] [CrossRef]
- De Luca, C.J. Surface Electromyography: Detection and Recording; DelSys Incorporated: Natick, MA, USA, 2002. [Google Scholar]
- Galbert, A.; Buis, A. Active, Actuated, and Assistive: A Scoping Review of Exoskeletons for the Hands and Wrists. Can. Prosthet. Orthot. J. 2024, 7, 43827. [Google Scholar] [CrossRef]
- Sousa, A.S.P.; Noites, A.; Vilarinho, R.; Santos, R. Long-Term Electrode–Skin Impedance Variation for Electromyographic Measurements. Sensors 2023, 23, 8582. [Google Scholar] [CrossRef]
- Yang, L.; Gan, L.; Zhang, Z.; Zhang, Z.; Yang, H.; Zhang, Y.; Wu, J. Insight into the Contact Impedance between the Electrode and the Skin Surface for Electrophysical Recordings. ACS Omega 2022, 7, 13906–13912. [Google Scholar] [CrossRef]
- Etana, B.B.; Malengier, B.; Krishnamoorthy, J.; Van Langenhove, L. Types of EMG Textile Electrodes: A Comparative Study Using PCA. Eng. Proc. 2023, 35, 6. [Google Scholar] [CrossRef]
- Kankula, R. Real-Life Skin Impedance Variations with Dry and Wet Electrodes for Bio-Potential Signal Acquisition. Int. J. Sci. Technol. 2025, 16, 1–17. [Google Scholar]
- Perego, P.; Sironi, R.; Gruppioni, E.; Andreoni, G. TWINMED T-SHIRT, a Smart Wearable System for ECG and EMG Monitoring for Rehabilitation with Exoskeletons. In Proceedings of the International Conference on Human-Computer Interaction, Copenhagen, Denmark, 23–28 July 2023. [Google Scholar]
- Euler, L.; Guo, L.; Persson, N.-K. A review of textile-based electrodes developed for electrostimulation. Text. Res. J. 2022, 92, 1300–1320. [Google Scholar] [CrossRef]
- Ali, B.; Cheraghi Bidsorkhi, H.; D’Aloia, A.G.; Laracca, M.; Sarto, M.S. Wearable graphene-based fabric electrodes for enhanced and long-term biosignal detection. Sensors Actuators Rep. 2023, 5, 100161. [Google Scholar] [CrossRef]
- Belbasis, A.; Fuss, F.K. Muscle Performance Investigated With a Novel Smart Compression Garment Based on Pressure Sensor Force Myography and Its Validation Against EMG. Front Physiol. 2018, 9, 408. [Google Scholar] [CrossRef]
- Lam, E.; Alizadeh-Meghrazi, M.; Schlums, A.; Eskandarian, L.; Mahnam, A.; Moineau, B.; Popovic, M.R. Exploring textile-based electrode materials for electromyography smart garments. J. Rehabil. Assist. Technol. Eng. 2022, 9, 20556683211061995. [Google Scholar] [CrossRef] [PubMed]
- Kim, H.; Lee, J.; Heo, U.; Jayashankar, D.K.; Agno, K.-C.; Kim, Y.; Kim, C.Y.; Oh, Y.; Byun, S.-H.; Choi, B.; et al. Skin preparation–free, stretchable microneedle adhesive patches for reliable electrophysiological sensing and exoskeleton robot control. Sci. Adv. 2024, 10, eadk5260. [Google Scholar] [CrossRef]
- Molinaro, D.D.; Kang, I.; Young, A.J. Estimating human joint moments unifies exoskeleton control, reducing user effort. Sci. Robot. 2024, 9, 8852. [Google Scholar] [CrossRef]
- Pitzalis, R.F.; Cartocci, N.; Natali, C.D.; Caldwell, D.G.; Berselli, G.; Ortiz, J. Development of a ML-Control Strategy for a Wrist Exoskeleton Based on EMG and Force Measurements with Sensor Strategy Optimisation. In Proceedings of the 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Heidelberg, Germany, 1–4 September 2024. [Google Scholar]
- Kabiri Ameri, S.; Ho, R.; Jang, H.; Tao, L.; Wang, Y.; Wang, L.; Schnyer, D.M.; Akinwande, D.; Lu, N. Graphene Electronic Tattoo Sensors. ACS Nano 2017, 11, 7634–7641. [Google Scholar] [CrossRef]
- Zhu, C.; Maurya, S.; Yi, J.; Dutta, A. Brain Computer Interface (BCI)-Enhanced Knee Exoskeleton Control for Assisted Sit-to-Stand Movement. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 15–19 July 2024. [Google Scholar]
- Kusche, R.; Ryschka, M. Combining Bioimpedance and EMG Measurements for Reliable Muscle Contraction Detection. IEEE Sens. J. 2019, 19, 11687–11696. [Google Scholar] [CrossRef]
- Farina, D.; Jiang, N.; Rehbaum, H.; Holobar, A.; Graimann, B.; Dietl, H.; Aszmann, O.C. The extraction of neural information from the surface EMG for the control of upper-limb prostheses: Emerging avenues and challenges. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 797–809. [Google Scholar] [CrossRef]
- Boyer, M.; Bouyer, L.; Roy, J.-S.; Campeau-Lecours, A. Reducing Noise, Artifacts and Interference in Single-Channel EMG Signals: A Review. Sensors 2023, 23, 2927. [Google Scholar] [CrossRef]
- Piskorowski, J. Powerline interference rejection from sEMG signal using notch filter with transient suppression. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012. [Google Scholar]
- Stoykov, N.S.; Lowery, M.M.; Kuiken, T.A. A finite-element analysis of the effect of muscle insulation and shielding on the surface EMG signal. IEEE Trans. Biomed. Eng. 2005, 52, 117–121. [Google Scholar] [CrossRef]
- Kauppi, J.P.; Hahne, J.; Müller, K.R.; Hyvärinen, A. Three-way analysis of spectrospatial electromyography data: Classification and interpretation. PLoS ONE 2015, 10, e0127231. [Google Scholar] [CrossRef] [PubMed]
- Wen, Y.; Kim, S.J.; Avrillon, S.; Levine, J.T.; Hug, F.; Pons, J.L. A Deep CNN Framework for Neural Drive Estimation From HD-EMG Across Contraction Intensities and Joint Angles. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 2950–2959. [Google Scholar] [CrossRef]
- De Luca, C.J.; Donald Gilmore, L.; Kuznetsov, M.; Roy, S.H. Filtering the surface EMG signal: Movement artifact and baseline noise contamination. J. Biomech. 2010, 43, 1573–1579. [Google Scholar] [CrossRef] [PubMed]
- Ladrova, M.; Martinek, R.; Nedoma, J.; Fajkus, M. Methods of Power Line Interference Elimination in EMG Signal. J. Biomim. Biomater. Biomed. Eng. 2019, 40, 64–70. [Google Scholar] [CrossRef]
- Chen, J.; Sun, Y.; Sun, S.; Yao, Z. Reducing Power Line Interference from sEMG Signals Based on Synchrosqueezed Wavelet Transform. Sensors 2023, 23, 5182. [Google Scholar] [CrossRef] [PubMed]
- Abbaspour, S.; Fallah, A.; Lindén, M.; Gholamhosseini, H. A novel approach for removing ECG interferences from surface EMG signals using a combined ANFIS and wavelet. J. Electromyogr. Kinesiol. 2016, 26, 52–59. [Google Scholar] [CrossRef]
- Andrade, A.O.; Nasuto, S.; Kyberd, P.; Sweeney-Reed, C.M.; Van Kanijn, F.R. EMG signal filtering based on Empirical Mode Decomposition. Biomed. Signal Process. Control 2006, 1, 44–55. [Google Scholar] [CrossRef]
- Mishra, V.K.; Bajaj, V.; Kumar, A.; Sharma, D.; Singh, G.K. An efficient method for analysis of EMG signals using improved empirical mode decomposition. AEU-Int. J. Electron. C. 2017, 72, 200–209. [Google Scholar] [CrossRef]
- Menegaldo, L.L. Real-time muscle state estimation from EMG signals during isometric contractions using Kalman filters. Biol. Cybern. 2017, 111, 335–346. [Google Scholar] [CrossRef]
- Limem, M.; Hamdi, M.A.; Maaref, M.A. Denoising uterine EMG signals using LMS and RLS adaptive algorithms. In Proceedings of the 2nd International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Monastir, Tunisia, 21–23 March 2016. [Google Scholar]
- Lu, G.; Brittain, J.-S.; Holland, P.; Yianni, J.; Green, A.L.; Stein, J.F.; Aziz, T.Z.; Wang, S. Removing ECG noise from surface EMG signals using adaptive filtering. Neurosci. Lett. 2009, 462, 14–19. [Google Scholar] [CrossRef] [PubMed]
- Nieto, R.; Fernández, P.R.; Murano, S.; Navarro, V.M.; del-Ama, A.J.; Borromeo, S. Conception of a System-on-Chip (SoC) Platform to Enable EMG-Guided Robotic Neurorehabilitation. Appl. Sci. 2025, 15, 1699. [Google Scholar] [CrossRef]
- Ritzmann, R.; Karacan, I.; Türker, K.S. Electromyographical Recordings During Vibration. In Manual of Vibration Exercise and Vibration Therapy; Rittweger, J., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 109–120. [Google Scholar]
- Jia, Z.; Chen, G.; Weng, Y.; Su, D. Manipulation of Analog Sensors through Electromagnetic Interference Attacks. In Proceedings of the 2023 IEEE 7th International Symposium on Electromagnetic Compatibility (ISEMC), Hangzhou, China, 20–23 October 2023. [Google Scholar]
- Tamburella, F.; Masciullo, M.; Pisotta, I.; Tagliamonte, N.L.; Molinari, M. Lower Limb Wearable Systems for Mobility and Rehabilitation Challenges: Clinical Focus. In Proceedings of the 2nd International Symposium on Wearable Robotics, WeRob2016, Segovia, Spain, 18–21 October 2016. [Google Scholar]
- Wang, Z.-Y.; Xiang, Z.-R.; Zhi, J.-Y.; Ding, T.-C.; Zou, R. A novel physiological signal denoising method coupled with multispectral adaptive wavelet denoising(MAWD) and unsupervised source counting algorithm(USCA). J. Eng. Res. 2024, 12, 175–189. [Google Scholar] [CrossRef]
- Jaarsveldt, C.V.; Peters, G.W.; Ames, M.; Chantler, M. Tutorial on Empirical Mode Decomposition: Basis Decomposition and Frequency Adaptive Graduation in Non-Stationary Time Series. IEEE Access 2023, 11, 94442–94478. [Google Scholar] [CrossRef]
- Zhang, L.; Long, J.; Zhao, R.; Cao, H.; Zhang, K. Estimation of the Continuous Pronation–Supination Movement by Using Multichannel EMG Signal Features and Kalman Filter: Application to Control an Exoskeleton. Front. Bioeng. Biotechnol. 2022, 9, 771255. [Google Scholar] [CrossRef] [PubMed]
- Ni, S.; Al-qaness, M.A.A.; Hawbani, A.; Al-Alimi, D.; Abd Elaziz, M.; Ewees, A.A. A survey on hand gesture recognition based on surface electromyography: Fundamentals, methods, applications, challenges and future trends. Appl. Soft Comput. 2024, 166, 112235. [Google Scholar] [CrossRef]
- Tkach, D.; Huang, H.; Kuiken, T.A. Study of stability of time-domain features for electromyographic pattern recognition. J. Neuroeng. Rehabil. 2010, 7, 21. [Google Scholar] [CrossRef]
- Muceli, S.; Merletti, R. Tutorial. Frequency analysis of the surface EMG signal: Best practices. J. Electromyogr. Kinesiol. 2024, 79, 102937. [Google Scholar] [CrossRef]
- Spiewak, C.; Islam, M.; Zaman, M.A.-U.; Rahman, M.H. A Comprehensive Study on EMG Feature Extraction and Classifiers. Open J. Biomed. Eng. Biosci. 2018, 1, 17–26. [Google Scholar] [CrossRef]
- Nazmi, N.; Abdul Rahman, M.A.; Yamamoto, S.-I.; Ahmad, S.A.; Zamzuri, H.; Mazlan, S.A. A Review of Classification Techniques of EMG Signals during Isotonic and Isometric Contractions. Sensors 2016, 16, 1304. [Google Scholar] [CrossRef]
- Bawa, A.; Banitsas, K. Design Validation of a Low-Cost EMG Sensor Compared to a Commercial-Based System for Measuring Muscle Activity and Fatigue. Sensors 2022, 22, 5799. [Google Scholar] [CrossRef]
- González-Izal, M.; Malanda, A.; Gorostiaga, E.; Izquierdo, M. Electromyographic models to assess muscle fatigue. J. Electromyogr. Kinesiol. 2012, 22, 501–512. [Google Scholar] [CrossRef] [PubMed]
- Corvini, G.; Conforto, S. A Simulation Study to Assess the Factors of Influence on Mean and Median Frequency of sEMG Signals during Muscle Fatigue. Sensors 2022, 22, 6360. [Google Scholar] [CrossRef]
- Ozdemir, M.A.; Kisa, D.H.; Guren, O.; Akan, A. Hand gesture classification using time–frequency images and transfer learning based on CNN. Biomed. Signal Process. Control 2022, 77, 103787. [Google Scholar] [CrossRef]
- Vannozzi, G.; Conforto, S.; D’Alessio, T. Automatic detection of surface EMG activation timing using a wavelet transform based method. J. Electromyogr. Kinesiol. 2010, 20, 767–772. [Google Scholar] [CrossRef] [PubMed]
- Gültekin, E.; Ceylan, C.; Kaynak, H.K.; Çelik, H.İ.; Özbay, S.; Erdem, E.U. Analysis and Comparison of Fast Fourier and Wavelet Transform Techniques on Raw sEMG Data From Textile-Based Electrodes. In Proceedings of the Medical Technologies Congress (TIPTEKNO), Famagusta, Cyprus, 10–12 November 2023. [Google Scholar]
- Yousefi, J.; Hamilton-Wright, A. Characterizing EMG data using machine-learning tools. Comput. Biol. Med. 2014, 51, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Malik, S.N.A.; Senin, S.F. Automated system for concrete damage classification identification using Naïve-Bayesian classifier. AIP Conf. Proc. 2022, 2532, 040014. [Google Scholar]
- Li, G.; Yu, Z.; Yang, K.; Lin, M.; Chen, C.L.P. Exploring Feature Selection With Limited Labels: A Comprehensive Survey of Semi-Supervised and Unsupervised Approaches. IEEE Trans. Knowl. Data Eng. 2024, 36, 6124–6144. [Google Scholar] [CrossRef]
- Gu, Y.; Yang, D.; Huang, Q.; Yang, W.; Liu, H. Robust EMG pattern recognition in the presence of confounding factors: Features, classifiers and adaptive learning. Expert Syst. Appl. 2018, 96, 208–217. [Google Scholar] [CrossRef]
- Liu, J.; Ying, D.; Rymer, W.Z.; Zhou, P. Robust muscle activity onset detection using an unsupervised electromyogram learning framework. PLoS ONE 2015, 10, e0127990. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, C.; Zhang, X.; Chen, C.; Zhou, Y.; Ni, G.; Muh, S.; Lemos, S. Shoulder muscle activation pattern recognition based on sEMG and machine learning algorithms. Comput. Methods Programs Biomed. 2020, 197, 105721. [Google Scholar] [CrossRef] [PubMed]
- Parajuli, N.; Sreenivasan, N.; Bifulco, P.; Cesarelli, M.; Savino, S.; Niola, V.; Esposito, D.; Hamilton, T.J.; Naik, G.R.; Gunawardana, U.; et al. Real-Time EMG Based Pattern Recognition Control for Hand Prostheses: A Review on Existing Methods, Challenges and Future Implementation. Sensors 2019, 19, 4596. [Google Scholar] [CrossRef] [PubMed]
- Kok, C.L.; Ho, C.K.; Tan, F.K.; Koh, Y.Y. Machine Learning-Based Feature Extraction and Classification of EMG Signals for Intuitive Prosthetic Control. Appl. Sci. 2024, 14, 5784. [Google Scholar] [CrossRef]
- Ketykó, I.; Kovács, F.; Varga, K.Z. Domain Adaptation for sEMG-based Gesture Recognition with Recurrent Neural Networks. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Budapest, Hungary, 14–19 July 2019. [Google Scholar]
- Gallón, V.M.; Vélez, S.M.; Ramírez, J.; Bolaños, F. Comparison of machine learning algorithms and feature extraction techniques for the automatic detection of surface EMG activation timing. Biomed. Signal Process. Control 2024, 94, 106266. [Google Scholar] [CrossRef]
- Zhang, Z.; Beck, M.W.; Winkler, D.A.; Huang, B.; Sibanda, W.; Goyal, H. Opening the black box of neural networks: Methods for interpreting neural network models in clinical applications. Ann. Transl. Med. 2018, 6, 216. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Cao, Z.; Zhu, H.; Zhao, J. A Survey of Optimization Methods From a Machine Learning Perspective. IEEE Trans. Cybern. 2019, 50, 3668–3681. [Google Scholar] [CrossRef]
- Tepe, C.; Demir, M.C. Real-Time Classification of EMG Myo Armband Data Using Support Vector Machine. IRBM 2022, 43, 300–308. [Google Scholar] [CrossRef]
- Laganà, F.; Pratticò, D.; Angiulli, G.; Oliva, G.; Pullano, S.A.; Versaci, M.; La Foresta, F. Development of an Integrated System of sEMG Signal Acquisition, Processing, and Analysis with AI Techniques. Signals 2024, 5, 476–493. [Google Scholar] [CrossRef]
- Li, C.; Chen, X.; Zhang, X.; Wu, D. Research on the electromyography-based pattern recognition for inter-limb coordination in human crawling motion. Front. Neurosci. 2024, 18, 1349347. [Google Scholar] [CrossRef]
- Abdullah, A.A.; Subasi, A.; Qaisar, S.M. Surface EMG Signal Classification by Using WPD and Ensemble Tree Classifiers. In Proceedings of the International Conference on Medical and Biological Engineering, Sarajevo, Bosnia and Herzegovina, 16–18 March 2017. [Google Scholar]
- Biau, G.; Scornet, E. A random forest guided tour. TEST 2016, 25, 197–227. [Google Scholar] [CrossRef]
- Cai, S.; Chen, Y.; Huang, S.; Wu, Y.; Zheng, H.; Li, X.; Xie, L. SVM-Based Classification of sEMG Signals for Upper-Limb Self-Rehabilitation Training. Front. Neurorobot. 2019, 13, 31. [Google Scholar] [CrossRef]
- Gao, X.; Bai, W.; Dang, Q.; Yang, S.; Zhang, G. Learnable self-supervised support vector machine based individual selection strategy for multimodal multi-objective optimization. Inf. Sci. 2025, 690, 121553. [Google Scholar] [CrossRef]
- Beltrame, G.; Scano, A.; Marino, G.; Peccati, A.; Molinari Tosatti, L.; Portinaro, N. Recent developments in muscle synergy analysis in young people with neurodevelopmental diseases: A Systematic Review. Front. Bioeng. Biotechnol. 2023, 11, 1145937. [Google Scholar] [CrossRef] [PubMed]
- Borzelli, D.; De Marchis, C.; Quercia, A.; De Pasquale, P.; Casile, A.; Quartarone, A.; Calabrò, R.S.; d’Avella, A. Muscle Synergy Analysis as a Tool for Assessing the Effectiveness of Gait Rehabilitation Therapies: A Methodological Review and Perspective. Bioengineering 2024, 11, 793. [Google Scholar] [CrossRef] [PubMed]
- d’Avella, A.; Bizzi, E. Shared and specific muscle synergies in natural motor behaviors. Proc. Natl. Acad. Sci. USA 2005, 102, 3076–3081. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, D.; Yan, Z.; Yu, L.; Gui, L.; Yang, C.; Yang, W. Optimizing Exoskeleton Assistance: Muscle Synergy-Based Actuation for Personalized Hip Exoskeleton Control. Actuators 2024, 13, 54. [Google Scholar] [CrossRef]
- Afzal, T.; Zhu, F.; Tseng, S.C.; Lincoln, J.A.; Francisco, G.E.; Su, H.; Chang, S.H. Evaluation of Muscle Synergy During Exoskeleton-Assisted Walking in Persons With Multiple Sclerosis. IEEE Trans. Biomed. Eng. 2022, 69, 3265–3274. [Google Scholar] [CrossRef]
- Alibeji, N.A.; Molazadeh, V.; Moore-Clingenpeel, F.; Sharma, N. A Muscle Synergy-Inspired Control Design to Coordinate Functional Electrical Stimulation and a Powered Exoskeleton: Artificial Generation of Synergies to Reduce Input Dimensionality. IEEE Contr. Syst. Mag. 2018, 38, 35–60. [Google Scholar] [CrossRef]
- Hassan, M.; Kadone, H.; Ueno, T.; Hada, Y.; Sankai, Y.; Suzuki, K. Feasibility of Synergy-Based Exoskeleton Robot Control in Hemiplegia. IEEE Trans. Neural. Syst. Rehabil. Eng. 2018, 26, 1233–1242. [Google Scholar] [CrossRef]
- Ma, Y.; Cui, B.; Jiang, C.; Gu, H.; Zhang, H.; Zhong, Q. Extracting Muscle Synergies Using Constrained Non-Negative Matrix Factorization for Motion Intention in Rehabilitation Robotics. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Bangkok, Thailand, 10–14 December 2024. [Google Scholar]
- Ge, W.; She, J.; Guo, S.; Wang, F.; Zhao, J.; Kawata, S. The Analysis of Muscle-Synergy Similarity between Walking and Pedaling Based on Variational Mode Decomposition and Non-Negative Matrix Factorization. In Proceedings of the IEEE International Conference on Engineering, Technology, and Innovation (ICE/ITMC), Madeira, Portugal, 24–28 June 2024. [Google Scholar]
- Ao, D.; Vega, M.M.; Shourijeh, M.S.; Patten, C.; Fregly, B.J. EMG-driven musculoskeletal model calibration with estimation of unmeasured muscle excitations via synergy extrapolation. Front. Bioeng. Biotechnol. 2022, 10, 962959. [Google Scholar] [CrossRef]
- Kim, Y.; Stapornchaisit, S.; Miyakoshi, M.; Yoshimura, N.; Koike, Y. The Effect of ICA and Non-negative Matrix Factorization Analysis for EMG Signals Recorded From Multi-Channel EMG Sensors. Front. Neurosci. 2020, 14, 600804. [Google Scholar] [CrossRef]
- Wojtara, T.; Alnajjar, F.; Shimoda, S.; Kimura, H. Muscle synergy stability and human balance maintenance. J. Neuroeng. Rehabil. 2014, 11, 129. [Google Scholar] [CrossRef] [PubMed]
- Lee, J. Characteristics of muscle synergy extracted using an autoencoder in patients with stroke during the curved walking in comparison with healthy controls. Gait Posture 2024, 107, 225–232. [Google Scholar] [CrossRef]
- Fang, C.; He, B.; Wang, Y.; Cao, J.; Gao, S. EMG-Centered Multisensory Based Technologies for Pattern Recognition in Rehabilitation: State of the Art and Challenges. Biosensors 2020, 10, 85. [Google Scholar] [CrossRef]
- De Luca, C.J.; Erim, Z. Common drive in motor units of a synergistic muscle pair. J. Neurophysiol. 2002, 87, 2200–2204. [Google Scholar] [CrossRef] [PubMed]
- Chowdhury, R.H.; Reaz, M.B.I.; Ali, M.A.B.M.; Bakar, A.A.A.; Chellappan, K.; Chang, T.G. Surface Electromyography Signal Processing and Classification Techniques. Sensors 2013, 13, 12431–12466. [Google Scholar] [CrossRef]
- Mewett, D.T.; Reynolds, K.J.; Nazeran, H. Reducing power line interference in digitised electromyogram recordings by spectrum interpolation. Med. Biol. Eng. Comput. 2004, 42, 524–531. [Google Scholar] [CrossRef] [PubMed]
- Asghari Oskoei, M.; Hu, H. Myoelectric control systems—A survey. Biomed. Signal Process. Control 2007, 2, 275–294. [Google Scholar] [CrossRef]
- Kiguchi, K.; Hayashi, Y. An EMG-Based Control for an Upper-Limb Power-Assist Exoskeleton Robot. IEEE Trans. Syst. Man. Cybern. 2012, 42, 1064–1071. [Google Scholar] [CrossRef]
- Fu, J.; Choudhury, R.; Hosseini, S.M.; Simpson, R.; Park, J.-H. Myoelectric Control Systems for Upper Limb Wearable Robotic Exoskeletons and Exosuits—A Systematic Review. Sensors 2022, 22, 8134. [Google Scholar] [CrossRef]
- Khushaba, R.N.; Kodagoda, S.; Takruri, M.; Dissanayake, G. Toward improved control of prosthetic fingers using surface electromyogram (EMG) signals. Expert Syst. Appl. 2012, 39, 10731–10738. [Google Scholar] [CrossRef]
- Phinyomark, A.; Quaine, F.; Charbonnier, S.; Serviere, C.; Tarpin-Bernard, F.; Laurillau, Y. EMG feature evaluation for improving myoelectric pattern recognition robustness. Expert Syst. Appl. 2013, 40, 4832–4840. [Google Scholar] [CrossRef]
- Englehart, K.; Hudgins, B.; Chan, A.D.C. Continuous multifunction myoelectric control using pattern recognition. Technol. Disab. 2003, 15, 95–103. [Google Scholar] [CrossRef]
- Boostani, R.; Moradi, M.H. Evaluation of the forearm EMG signal features for the control of a prosthetic hand. Physiol. Meas. 2003, 24, 309–319. [Google Scholar] [CrossRef] [PubMed]
- Zecca, M.; Micera, S.; Carrozza, M.C.; Dario, P. Control of multifunctional prosthetic hands by processing the electromyographic signal. Crit. Rev. Biomed. Eng. 2002, 30, 459–485. [Google Scholar] [CrossRef]
- Xia, P.; Hu, J.; Peng, Y. EMG-Based Estimation of Limb Movement Using Deep Learning with Recurrent Convolutional Neural Networks. Artif. Organs. 2018, 42, E67–E77. [Google Scholar] [CrossRef]
- Scheme, E.; Englehart, K. Electromyogram pattern recognition for control of powered upper-limb prostheses: State of the art and challenges for clinical use. J. Rehabil. Res. Dev. 2011, 48, 643–659. [Google Scholar] [CrossRef]
- Wang, X.; Ao, D.; Li, L. Robust myoelectric pattern recognition methods for reducing users’ calibration burden: Challenges and future. Front. Bioeng. Biotechnol. 2024, 12, 1329209. [Google Scholar] [CrossRef]
- Young, A.J.; Hargrove, L.J.; Kuiken, T.A. The effects of electrode size and orientation on the sensitivity of myoelectric pattern recognition systems to electrode shift. IEEE Trans. Biomed. Eng. 2011, 58, 2537–2544. [Google Scholar] [CrossRef]
- Georgi, M.; Amma, C.; Schultz, T. Fusion and Comparison of IMU and EMG Signals for Wearable Gesture Recognition. In Proceedings of the International Joint Conference on Biomedical Engineering Systems and Technologies, Lisbon, Portugal, 12–15 January 2015. [Google Scholar]
- Gordleeva, S.Y.; Lobov, S.A.; Grigorev, N.A.; Savosenkov, A.O.; Shamshin, M.O.; Lukoyanov, M.V.; Khoruzhko, M.A.; Kazantsev, V.B. Real-Time EEG–EMG Human–Machine Interface-Based Control System for a Lower-Limb Exoskeleton. IEEE Access 2020, 8, 84070–84081. [Google Scholar] [CrossRef]
- Atzori, M.; Gijsberts, A.; Castellini, C.; Caputo, B.; Hager, A.G.; Elsig, S.; Giatsidis, G.; Bassetto, F.; Müller, H. Electromyography data for non-invasive naturally-controlled robotic hand prostheses. Sci. Data 2014, 1, 140053. [Google Scholar] [CrossRef]
- Prasanth, H.; Caban, M.; Keller, U.; Courtine, G.; Ijspeert, A.; Vallery, H.; von Zitzewitz, J. Wearable Sensor-Based Real-Time Gait Detection: A Systematic Review. Sensors 2021, 21, 2727. [Google Scholar] [CrossRef]
- Phinyomark, A.; Phukpattaranont, P.; Limsakul, C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012, 39, 7420–7431. [Google Scholar] [CrossRef]
- Krasoulis, A.; Kyranou, I.; Erden, M.S.; Nazarpour, K.; Vijayakumar, S. Improved prosthetic hand control with concurrent use of myoelectric and inertial measurements. J. Neuroeng. Rehabil. 2017, 14, 71. [Google Scholar] [CrossRef] [PubMed]
- Luo, S.; Androwis, G.; Adamovich, S.; Su, H.; Nunez, E.; Zhou, X. Reinforcement Learning and Control of a Lower Extremity Exoskeleton for Squat Assistance. Front. Robot. AI 2021, 8, 702845. [Google Scholar] [CrossRef] [PubMed]
- Tu, X.; Li, M.; Liu, M.; Si, J.; Huang, H.H. A Data-Driven Reinforcement Learning Solution Framework for Optimal and Adaptive Personalization of a Hip Exoskeleton. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021. [Google Scholar]
- Valdivieso Caraguay, Á.L.; Vásconez, J.P.; Barona López, L.I.; Benalcázar, M.E. Recognition of Hand Gestures Based on EMG Signals with Deep and Double-Deep Q-Networks. Sensors 2023, 23, 3905. [Google Scholar] [CrossRef]
- Huang, L.; Zheng, J.; Gao, Y.; Song, Q.; Liu, Y. A Lower Limb Exoskeleton Adaptive Control Method Based on Model-free Reinforcement Learning and Improved Dynamic Movement Primitives. J. Intell. Robot. Syst. 2025, 111, 24. [Google Scholar] [CrossRef]
- Geng, Y.; Zhou, P.; Li, G. Toward attenuating the impact of arm positions on electromyography pattern-recognition based motion classification in transradial amputees. J. Neuroeng. Rehabil. 2012, 9, 74. [Google Scholar] [CrossRef]
- Echeveste, S.; Bhounsule, P.A. Electromyography-Based Human-in-the-Loop Bayesian Optimization to Assist Free Leg Swinging. Biomech. 2025, 5, 21. [Google Scholar] [CrossRef]
- Cifrek, M.; Medved, V.; Tonković, S.; Ostojić, S. Surface EMG based muscle fatigue evaluation in biomechanics. Clin. Biomech. 2009, 24, 327–340. [Google Scholar] [CrossRef]
- Turpin, N.A.; Guével, A.; Durand, S.; Hug, F. Fatigue-related adaptations in muscle coordination during a cyclic exercise in humans. J. Exp. Biol. 2011, 214, 3305–3314. [Google Scholar] [CrossRef] [PubMed]
- Lalitharatne, T.D.; Teramoto, K.; Hayashi, Y.; Nanayakkara, T.; Kiguchi, K. Evaluation of Fuzzy-Neuro Modifiers for Compensation of the Effects of Muscle Fatigue on EMG-Based Control to be Used in Upper-Limb Power-Assist Exoskeletons. J. Adv. Mech. Des. Syst. Manuf. 2013, 7, 736–751. [Google Scholar] [CrossRef]
- Zheng, Z.; Wu, Z.; Zhao, R.; Ni, Y.; Jing, X.; Gao, S. A Review of EMG-, FMG-, and EIT-Based Biosensors and Relevant Human-Machine Interactivities and Biomedical Applications. Biosensors 2022, 12, 516. [Google Scholar] [CrossRef] [PubMed]
- Nazari, V.; Zheng, Y.-P. Controlling Upper Limb Prostheses Using Sonomyography (SMG): A Review. Sensors 2023, 23, 1885. [Google Scholar] [CrossRef]
- Zandigohar, M.; Han, M.; Sharif, M.; Günay, S.Y.; Furmanek, M.P.; Yarossi, M.; Bonato, P.; Onal, C.; Padır, T.; Erdoğmuş, D.; et al. Multimodal fusion of EMG and vision for human grasp intent inference in prosthetic hand control. Front. Robot. AI. 2024, 11, 1312554. [Google Scholar] [CrossRef]
- Al-Quraishi, M.S.; Elamvazuthi, I.; Tang, T.B.; Al-Qurishi, M.; Parasuraman, S.; Borboni, A. Multimodal Fusion Approach Based on EEG and EMG Signals for Lower Limb Movement Recognition. IEEE Sens. J. 2021, 21, 27640–27650. [Google Scholar] [CrossRef]
- Zeng, J.; Zhou, Y.; Yang, Y.; Xu, Z.; Zhang, H.; Liu, H. Robustness of Combined sEMG and Ultrasound Modalities Against Muscle Fatigue in Force Estimation. In Proceedings of the 14th International Conference, ICIRA 2021, Yantai, China, 22–25 October 2021. [Google Scholar]
- Covi, E.; Donati, E.; Liang, X.; Kappel, D.; Heidari, H.; Payvand, M.; Wang, W. Adaptive Extreme Edge Computing for Wearable Devices. Front. Neurosci. 2021, 15, 611300. [Google Scholar] [CrossRef]
- Jeong, J.-W.; Lee, W.; Kim, Y.-J. A Real-Time Wearable Physiological Monitoring System for Home-Based Healthcare Applications. Sensors 2022, 22, 104. [Google Scholar] [CrossRef]
- Li, J.; Bhuiyan, M.; Huang, X.; McDonald, B.; Farrell, T.; Clancy, E.A. Reducing Electric Power Consumption When Transmitting ECG/EMG/EEG Using a Bluetooth Low Energy Microcontroller. In Proceedings of the 2018 IEEE Signal Processing in Medicine and Biology Symposium (SPMB), Philadelphia, PA, USA, 1 December 2018. [Google Scholar]
- Salkic, S.; Ustundag, B.C.; Uzunovic, T.; Golubovic, E. Edge Computing Framework for Wearable Sensor-Based Human Activity Recognition. In Proceedings of the International Symposium on Innovative and Interdisciplinary Applications of Advanced Technologies (IAT 2019), Sarajevo, Bosnia and Herzegovina, 20–23 June 2020. [Google Scholar]
- Hazar, Y. and Faruk Ertuğrul, Ö.; Developing a real-time hand exoskeleton system that controlled by a hand gesture recognition system via wireless sensors. Biomed. Signal Process. Control 2025, 99, 106886. [Google Scholar] [CrossRef]
- Vescio, G.; Rosell, J.; Nescolarde, L.; Giovinazzo, G. Muscle Fatigue Monitoring Using a Multifrequency Bioimpedance Technique. In Proceedings of the 5th European Conference of the International Federation for Medical and Biological Engineering, Budapest, Hungary, 14–18 September 2012. [Google Scholar]
- Huang, L.K.; Huang, L.N.; Gao, Y.M.; Lučev, V.Ž.; Cifrek, M.; Du, M. Electrical Impedance Myography Applied to Monitoring of Muscle Fatigue During Dynamic Contractions. IEEE Access 2020, 8, 13056–13065. [Google Scholar] [CrossRef]
- Jaiswal, A.; Zadeh, M.Z.; Hebri, A.; Makedon, F. Assessing fatigue with multimodal wearable sensors and machine learning. arXiv 2022, arXiv:2205.00287. [Google Scholar]
- Peternel, L.; Noda, T.; Petrič, T.; Ude, A.; Morimoto, J.; Babič, J. Adaptive Control of Exoskeleton Robots for Periodic Assistive Behaviours Based on EMG Feedback Minimisation. PLoS ONE 2016, 11, 0148942. [Google Scholar] [CrossRef] [PubMed]
- De Angelis, S.; Princi, A.A.; Dal Farra, F.; Morone, G.; Caltagirone, C.; Tramontano, M. Vibrotactile-Based Rehabilitation on Balance and Gait in Patients with Neurological Diseases: A Systematic Review and Metanalysis. Brain Sci. 2021, 11, 518. [Google Scholar] [CrossRef] [PubMed]
- Kawase, T.; Sakurada, T.; Koike, Y.; Kansaku, K. A hybrid BMI-based exoskeleton for paresis: EMG control for assisting arm movements. J. Neural Eng. 2017, 14, 016015. [Google Scholar] [CrossRef]
- Wei, W.; Ren, L. From Unimodal to Multimodal: Improving sEMG-Based Pattern Recognition via deep generative models. arXiv 2023, arXiv:2308.04091. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Advantages | Limitations | Applicability |
|---|---|---|---|
| sEMG |
|
| Widely used in commercial exoskeletons |
| iEMG |
|
| Research and diagnostic studies |
| HD-sEMG |
|
| Research and experimental control |
| ENG |
|
| Emerging research technology |
| Sensor Type | Signal Fidelity | Wearability and Comfort | Robustness to Noise | Integration Complexity |
|---|---|---|---|---|
| Surface EMG | Moderate | High | Low to moderate | Low |
| Intramuscular EMG | High | Low | High | High |
| High-Density sEMG | Very High | Low to Moderate | Moderate | High |
| Textile-based EMG | Moderate | Very High | Low to Moderate | Moderate |
| Capacitive EMG | Low to Moderate | Very High | Low | High |
| Hybrid EMG | High | Moderate | High | Very High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sul, J.-H.; Piyathilaka, L.; Moratuwage, D.; Dunu Arachchige, S.; Jayawardena, A.; Kahandawa, G.; Preethichandra, D.M.G. Electromyography Signal Acquisition, Filtering, and Data Analysis for Exoskeleton Development. Sensors 2025, 25, 4004. https://doi.org/10.3390/s25134004
Sul J-H, Piyathilaka L, Moratuwage D, Dunu Arachchige S, Jayawardena A, Kahandawa G, Preethichandra DMG. Electromyography Signal Acquisition, Filtering, and Data Analysis for Exoskeleton Development. Sensors. 2025; 25(13):4004. https://doi.org/10.3390/s25134004
Chicago/Turabian StyleSul, Jung-Hoon, Lasitha Piyathilaka, Diluka Moratuwage, Sanura Dunu Arachchige, Amal Jayawardena, Gayan Kahandawa, and D. M. G. Preethichandra. 2025. "Electromyography Signal Acquisition, Filtering, and Data Analysis for Exoskeleton Development" Sensors 25, no. 13: 4004. https://doi.org/10.3390/s25134004
APA StyleSul, J.-H., Piyathilaka, L., Moratuwage, D., Dunu Arachchige, S., Jayawardena, A., Kahandawa, G., & Preethichandra, D. M. G. (2025). Electromyography Signal Acquisition, Filtering, and Data Analysis for Exoskeleton Development. Sensors, 25(13), 4004. https://doi.org/10.3390/s25134004