1. Introduction
Wireless sensor networks (WSNs), composed of spatially distributed nodes with sensing, computation, and communication capabilities, have become indispensable in applications ranging from environmental monitoring to industrial automation [
1]. These networks typically comprise two distinct node categories: anchor nodes (ANs), with precisely known coordinates, and a target node (TN), requiring localization. While WSNs offer substantial benefits in data collection efficiency, their positioning accuracy remains hindered by environmental noise, hardware imperfections, and non-line-of-sight (NLOS) propagation effects [
2]. The criticality of accurate localization stems from the spatial dependency of sensor data, where positional context fundamentally determines information relevance in scenarios such as disaster response and military surveillance.
Distance-based localization methodologies, including time of arrival (TOA) [
3], time difference of arrival (TDOA) [
4], angle of arrival (AOA) [
5], and received signal strength (RSS) [
6] techniques, have been extensively investigated. Among these, RSS-based approaches dominate practical implementations due to their hardware simplicity and energy efficiency [
7]. The RSS localization framework typically formulates a maximum likelihood (ML) estimation problem derived from the log-normal shadowing model [
1]. Despite its prevalence, RSS localization has two inherent limitations: sensitivity to path-loss exponent variations and non-convexity in ML estimation when the transmitter power is unknown.
Conventional optimization techniques, such as least squares (LS), weighted least squares (WLS), and semidefinite programming (SDP) [
8], often require meticulous initialization to avoid convergence to local minima in multimodal cost landscapes. Evolutionary algorithms—notably differential evolution (DE) [
9], particle swarm optimization (PSO) [
10], and simulated annealing (SA) [
11]—have demonstrated superior global optimization capabilities for such non-convex problems. DE, in particular, has gained prominence due to its balance of computational efficiency and robustness [
12]. Recent advancements integrate opposition-based learning (OBL) [
13,
14,
15,
16,
17] to enhance population diversity, as exemplified in DEOR variants [
18]. Nevertheless, two critical limitations persist in existing DE implementations: (1) fixed scaling factors (
F), that enforce suboptimal exploration–exploitation trade-offs; and (2) restrictive boundary constraints, that disregard valuable information from infeasible solutions during early iterations.
This paper addresses these limitations through two synergistic enhancements to DE. Firstly, an adaptive scaling factor mechanism is proposed. This mechanism adjusts the scaling factor F dynamically according to the running state of the algorithm during the optimization process. When , the algorithm focuses on global exploration, widely searching the solution space to obtain the approximate feasible region of the problem. As the optimization progresses, when , the algorithm automatically switches to the local refinement mode, conducting a detailed search for the feasible region obtained earlier to improve the accuracy of the solution. Secondly, a penalty-augmented cost function is introduced. In the early stages of algorithm iteration, feasible solutions close to the boundary are fully utilized to provide directional guidance for the search. At the same time, as the number of iterations increases, this function gradually increases the penalty for constraint violations, effectively guiding the algorithm to find the optimal solution that satisfies the constraint conditions. In addition, in this study, the initial search boundary is strategically broadened to ensure that the algorithm can cover a wider solution space and avoid becoming trapped in local optima. Moreover, the traditional explicit constraint-handling link is removed, simplifying the algorithm process. Through the above improvements, this method can significantly accelerate the convergence speed while ensuring that the quality of the solution is not affected, providing an efficient algorithm support for solving complex optimization problems.
The remainder of this paper is organized as follows:
Section 2 formalizes the localization problem and DE fundamentals.
Section 3 details the proposed algorithmic enhancements. A parameter sensitivity analysis appears in
Section 4, followed by comprehensive performance comparisons in
Section 5. Conclusions and future directions are discussed in
Section 6.
4. Parameter Sensitivity Analysis
It is well known that the DE algorithm involves multiple key parameters that significantly influence its performance and convergence behavior. Among these variables, the number of iterations of the population
G plays a crucial role in determining the maximum number of evolutionary generations that the algorithm undergoes. Furthermore, the population size
, which represents the number of individuals in each generation, directly affects the diversity and exploration capacity of the algorithm. Another essential parameter is the probability of crossover
, which controls the rate at which genetic information is exchanged between candidate solutions during the recombination phase. Furthermore, in our proposed enhanced DE algorithm, we introduce an adaptive scaling factor
as its initial value, which dynamically adjusts to improve the efficiency of convergence. Alongside this, we incorporate an expansion factor
, which is utilized to modify the constraint conditions, thereby enhancing the algorithm’s flexibility and robustness in handling optimization problems under varying conditions. In this section, we study the values of each variable in turn and find the values that improve the performance of DE. Through systematic experimentation, we investigate the effects of four critical parameters. All experiments maintain constant environmental conditions (
,
,
) within a
search domain. The performance criterion is the root mean square error (RMSE), which is defined as
All comparative experiments adopt the optimized parameters from
Section 4 unless otherwise specified. The environmental parameters follow the log-normal shadowing model (
1) and real-world restaurant deployment constraints. For ease of reference, all the parameters are presented in
Table 1.
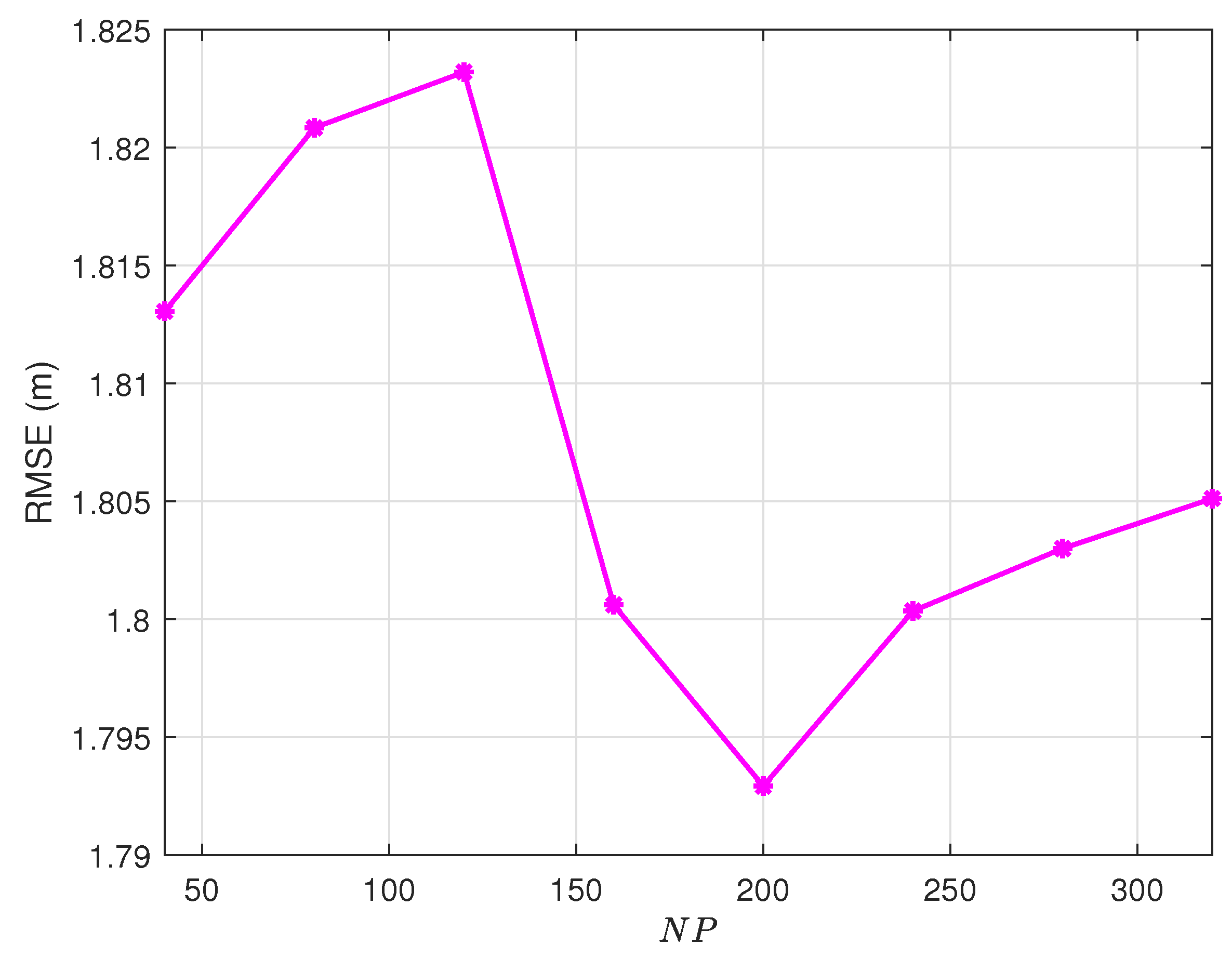
4.1. Population Size Optimization
Figure 2 demonstrates the non-monotonic relationship between population size (
) and localization accuracy RMSE. In this figure, we first take
, according to the empirical value, and then randomly select the values of
G,
, and
. Extensive experimental results demonstrate that the population size parameter in the DE algorithm exhibits a non-trivial impact on optimization performance. Specifically, our systematic investigations reveal that selecting excessively small or unduly large values for the individual count (
) in the population leads to suboptimal algorithmic performance. When the population contains too few individuals (that is,
is set below a certain threshold), the algorithm fails to maintain sufficient genetic diversity, limiting its exploration ability in the solution space. In contrast, a population size that is too large (that is,
exceeds an optimal range) results in unnecessary computational overhead without providing the corresponding improvements in solution quality. Through comprehensive testing across multiple benchmark functions, we have quantitatively verified that there exists an optimal range for the individual count that maximizes the performance enhancement potential of the DE algorithm. Deviating from this optimal range in either direction, whether by choosing a value that is too conservative or too aggressive, will inevitably compromise the algorithm’s ability to leverage its full performance improvement capabilities. When
, performance is the best in our experiment. Then, we determined the value of
, and other variables remained fixed. The experiments were repeated to study the influence of the number of iterations of the population
G on DE.
4.2. Generation Limit Selection
Figure 3 shows that the number of iterations of the population also affects DE to a greater or lesser extent, and the experimental results are the best when
in our experiment. Next, we determine
n and
G, and we discuss whether the value of
also affects the experiment.
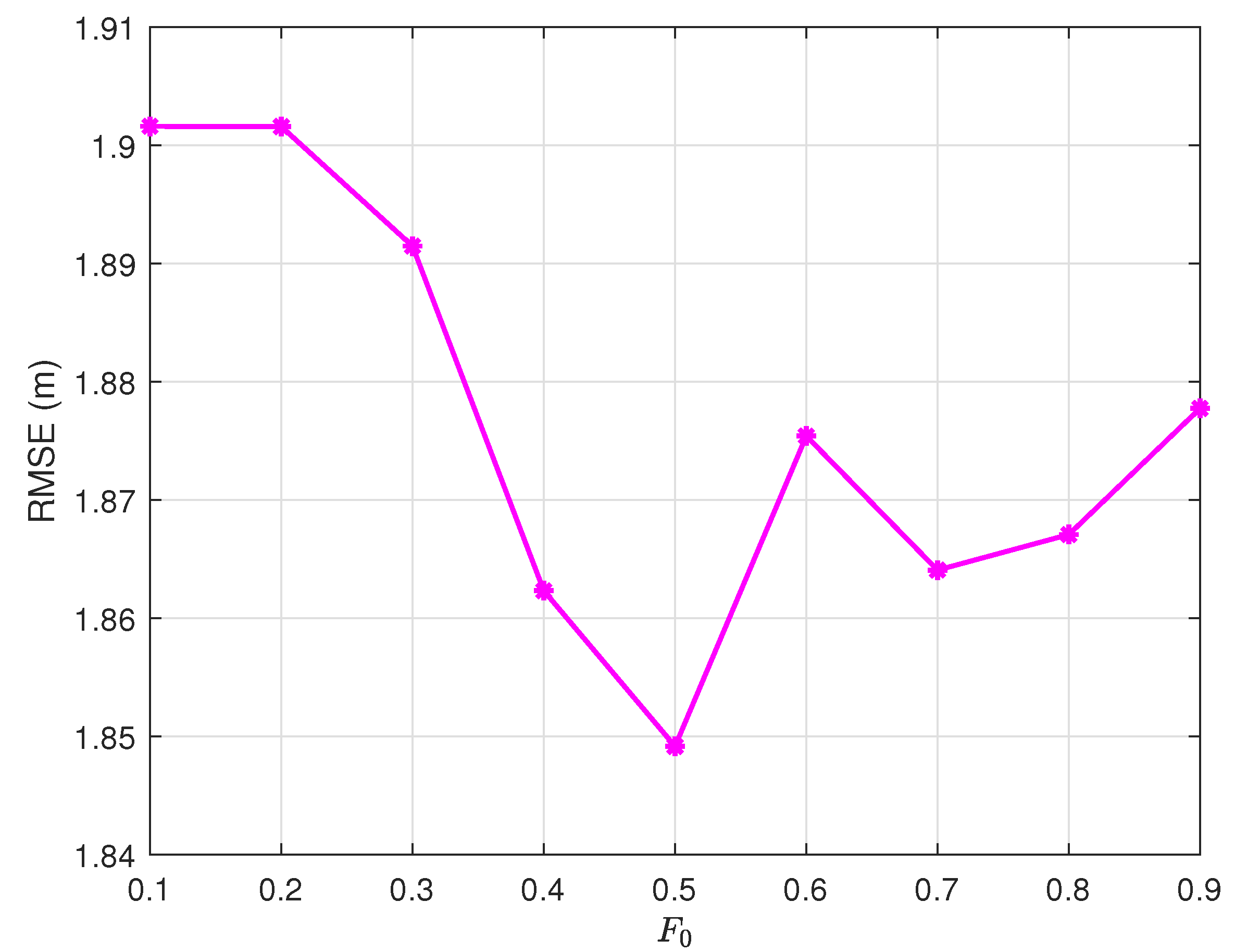
4.3. Scaling Factor Adaptation
The non-convex RMSE landscape in
Figure 4 reveals an optimal initial scaling factor
. This value enables a smooth transition from global exploration (
in early generations) to local refinement (
in final stages), as governed by the adaptive law in (
10).
4.4. Boundary Expansion Analysis
Figure 5 demonstrates the critical role of the expansion factor
in balancing the exploration capability and computational efficiency. The experimental results reveal an optimal boundary expansion ratio at
. This configuration achieves a minimum RMSE of
m by effectively utilizing potential solutions near constraint edges while avoiding excessive computational overhead from over-expanded search domains.
Through a systematic parameter sensitivity analysis, we establish the empirically determined optimal parameters: , , , . These are used to compare the performance of MDE with other algorithms.
5. Performance Evaluation and Comparative Analysis
5.1. Experimental Validation
The proposed MDE algorithm is rigorously evaluated in realistic indoor positioning scenarios, specifically addressing the operational challenges of intelligent food delivery robots in commercial restaurants.
In practical restaurant deployment scenarios, intelligent food delivery robots face significant positioning challenges when performing order delivery tasks. When receiving an order, the robot must first achieve real-time self-localization to determine its current position within the restaurant’s dynamic environment, while simultaneously identifying the customer’s location through a multisensor fusion system. The positioning infrastructure comprises a distributed network of strategically placed wireless anchors and beacons on the ceiling at regular intervals, forming a sensor array that ensures full coverage of the area. However, the random initial position of the robot and the constantly changing layout of the restaurant, with moving furniture, staff, and other dynamic obstacles, create complex signal propagation conditions where the number and spatial distribution of detectable sensors vary significantly. These challenges become particularly acute in large dining establishments during peak operating hours, where high customer density leads to signal interference, frequent blockages, and variable noise levels in different frequency bands. Under such demanding conditions, the robot’s positioning performance in terms of both accuracy and speed is crucial for its operational effectiveness. The system’s ability to determine its position effectively directly impacts its path planning efficiency, obstacle avoidance reliability, and ultimately the success rate of food delivery. This makes the development of robust localization algorithms essential for ensuring operation in commercial environments, where system performance affects service quality. The proposed enhanced positioning system MDE algorithm addresses these operational requirements through its adaptive processing capabilities and optimized computational efficiency.
To compare the positioning performance of MDE, we compare the LSRE method based on error estimation (WLS) [
8], SDP [
7], and localization based on simulated annealing optimization (SA) [
11], standard DEOR [
18], and improved DEOR-F [
19]. For the sake of convenience, we list all the methods that are compared in
Table 2. The algorithms of these methods were implemented in MATLAB R2021a. For the SDP method, we used the well-known CVX software package [
20].
To generate RSS measurements, we set the path loss dBm, the path-loss exponent , and the reference distance m. In all the experiments in this paper, the number of Monte Carlo runs is . The anchor nodes and target node are randomly distributed in a square area of . And the target node can communicate with all the anchor nodes. The performance criterion is the RMSE.
Figure 6 shows a comparison between the performance of our proposed method and several other methods when the number of AN nodes is fixed, with increasing noise. The results show that our proposed method is superior to the traditional methods, having a smaller RMSE. Our proposed algorithm demonstrates superior performance compared to other population-based approaches (DEOR, SA, and DEOR-F) in low-noise environments.
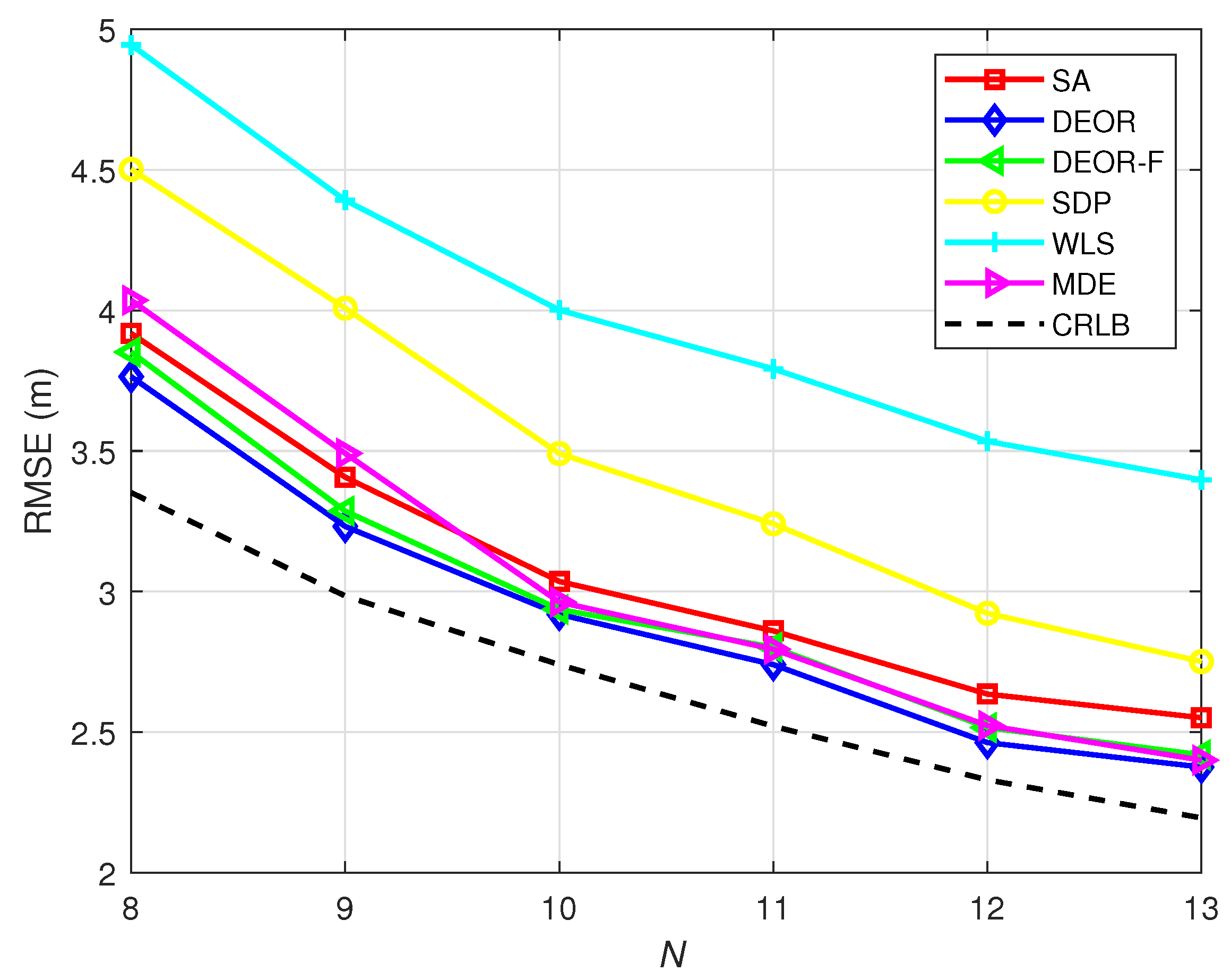
In
Figure 7, we show that when the noise is constant, the RMSE changes with an increase in the number of anchor nodes ANs. The MDE algorithm yields lower RMSE values with increasing numbers of anchor nodes. It should be noted that these suggested parameter values (namely, of
,
,
, and
G) are not absolute or universally valid, as their appropriate settings fundamentally depend on the characteristics of each particular problem.
5.2. Comparative Analysis
The proposed MDE algorithm demonstrates superior performance compared to traditional positioning methods due to its inherent population-based heuristic characteristics and strong global optimization capabilities, making it particularly effective for addressing complex positioning problems. Our improved DE strategy achieves a faster convergence speed than conventional DE implementations through several key enhancements. The incorporation of an adaptive scaling factor F significantly improves the algorithm’s flexibility by dynamically adjusting the mutation step sizes during the evolutionary process, enabling more efficient search range adaptation that accelerates convergence toward the global optimum. Furthermore, we introduce a novel cost function that serves a dual purpose: it not only eliminates the need for separate boundary processing but also actively utilizes boundary information to guide the global search toward optimal solutions.
Regarding computational complexity, the computational complexity analyses of all the algorithms are summarized in
Table 3. Specifically, SDP exhibits the highest complexity with substantial computational resource consumption. While WLS demonstrates the lowest complexity, its positioning accuracy is insufficient. Similarly, SA also features relatively low complexity, though its stochastic search nature may imply a larger constant factor. The proposed method shows comparable complexity to both DEOR and DEOR-F, with all three methods primarily depending on the number of iterations (
G), population size (
), and anchor node count (
N). This clearly indicates that the introduced adaptive mechanism does not significantly increase computational overhead. The synergistic combination of these enhancements results in a more robust and efficient positioning solution that effectively balances exploration and exploitation throughout the optimization process.
Finally, in
Table 4, we present the average computation times of all the algorithms. While our proposed method, which incorporates OBL and employs an adaptive scaling factor, along with the innovative introduction of a novel penalty function in the cost function, results in slightly higher computation times compared to DEOR and DEOR-F, its superior localization accuracy sufficiently compensates for this marginal increase in runtime.
5.3. Convergence Analysis
Table 5 presents the convergence performance of MDE in comparison with DEOR and DEOR-F under the fixed conditions of
anchor nodes and a population size of
. All the algorithms were executed under identical settings to ensure fair benchmarking. From the results, it is observed that DEOR-F achieves the fastest convergence (8 generations), followed by DEOR (10 generations) and MDE (12 generations). However, despite requiring slightly more iterations to converge, MDE yields the lowest RMSE, demonstrating better positioning accuracy. This trade-off in convergence speed is primarily attributed to the adaptive scaling factor employed by MDE. In the early stages of the evolutionary process, MDE maintains a relatively large scaling factor
F, promoting broad exploration of the search space and enhancing global search capabilities. As iterations progress,
F gradually decreases, shifting the search behavior toward local refinement. This dynamic adjustment helps avoid premature convergence but slightly delays reaching the termination criterion.
It is worth noting that the added complexity introduced by the adaptive mechanism does not increase computational overhead. As shown in the runtime column, the execution time of MDE remains comparable to DEOR and DEOR-F, validating the efficiency of the proposed strategy.
6. Conclusions
This paper presents a systematic advancement in RSS-based localization through a modified differential evolution framework that addresses two fundamental challenges in evolutionary optimization: the exploration–exploitation dilemma and constraint boundary utilization. By integrating an adaptive scaling factor with opposition-based learning principles, the proposed algorithm dynamically adjusts its search strategy during the optimization process, enabling robust performance across diverse operational environments. The novel penalty-augmented cost function further enhances positioning accuracy by strategically incorporating spatial constraints without imposing restrictive boundary conditions.
Experimental validation confirms significant improvements in both accuracy and efficiency: (1) Superior robustness under challenging noise conditions compared to state-of-the-art evolutionary methods (DEOR, DEOR-F), particularly where traditional approaches deteriorate; (2) accelerated convergence relative to convex optimization and stochastic search techniques (SDP, SA), achieving real-time capability critical for dynamic applications; (3) computational efficiency on par with advanced DE variants despite enhanced mechanisms, maintaining scalability for large-scale networks. The numerical results substantiate these improvements: Under high noise ( dB), MDE achieves an RMSE of m, outperforming DEOR-F ( m) and SA ( m). With anchors, MDE reduces the RMSE to m, exceeding SDP ( m) and WLS ( m). Computationally, MDE maintains complexity with an average runtime of s—100× faster than SDP (). Although requiring 12 generations for convergence (vs. DEOR-F’s 8), MDE achieves the lowest RMSE ( m) under identical settings.
The synergistic combination of population diversity preservation and adaptive parameter control enables efficient navigation of multimodal solution spaces. Looking forward, this work establishes a foundation for several promising research directions. Extending the framework to three-dimensional environments could address multi-floor localization challenges in smart infrastructure applications. The integration of real-time parameter adaptation mechanisms may further improve mobile target tracking capabilities in dynamic scenarios. Additionally, exploring hybrid architectures that combine evolutionary optimization with deep learning techniques could unlock new possibilities for autonomous navigation systems. The methodology’s inherent flexibility suggests broader applicability beyond wireless sensor networks, potentially benefiting emerging domains such as swarm robotics and industrial IoT deployments. While this study focuses on algorithmic innovation under standardized models, future work will incorporate public RSS datasets to quantify NLOS mitigation gains.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}