
Optimizing Autonomous Taxi Deployment for Safety at Skewed Intersections: A Simulation Study

Abstract
1. Introduction
2. Related Work
2.1. Intersection Management Systems
2.2. Autonomous Intersection Control
2.3. Autonomous Vehicle Decision-Making at Intersections
2.4. Vehicle-to-Everything (V2X) Communication in Intersection Management
2.5. Safety Implications of Autonomous Vehicles at Intersections
3. Materials and Methods
3.1. Traffic Simulation
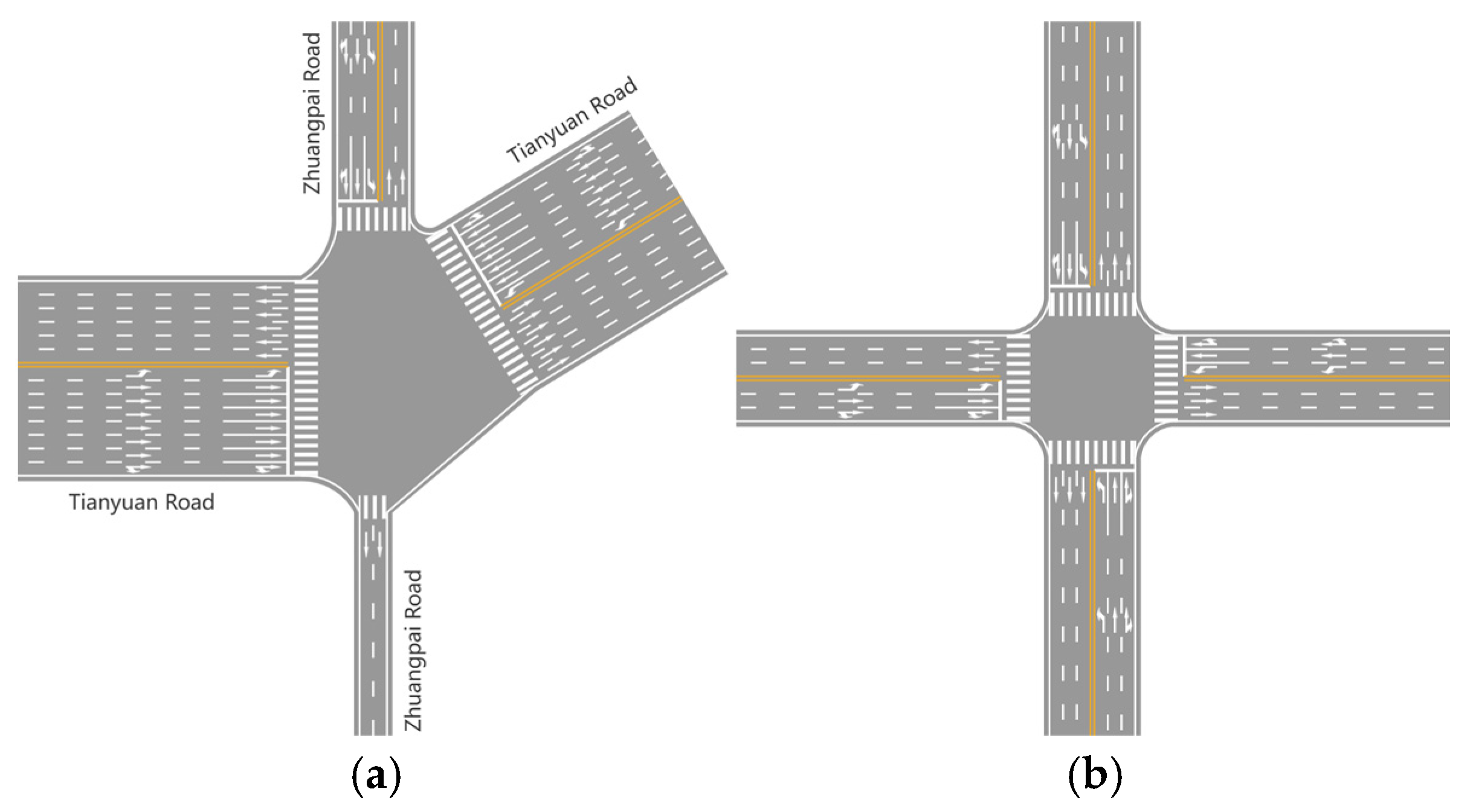
3.2. Intersection Scenarios
3.3. Safety Effect Evaluation
4. Results and Discussion
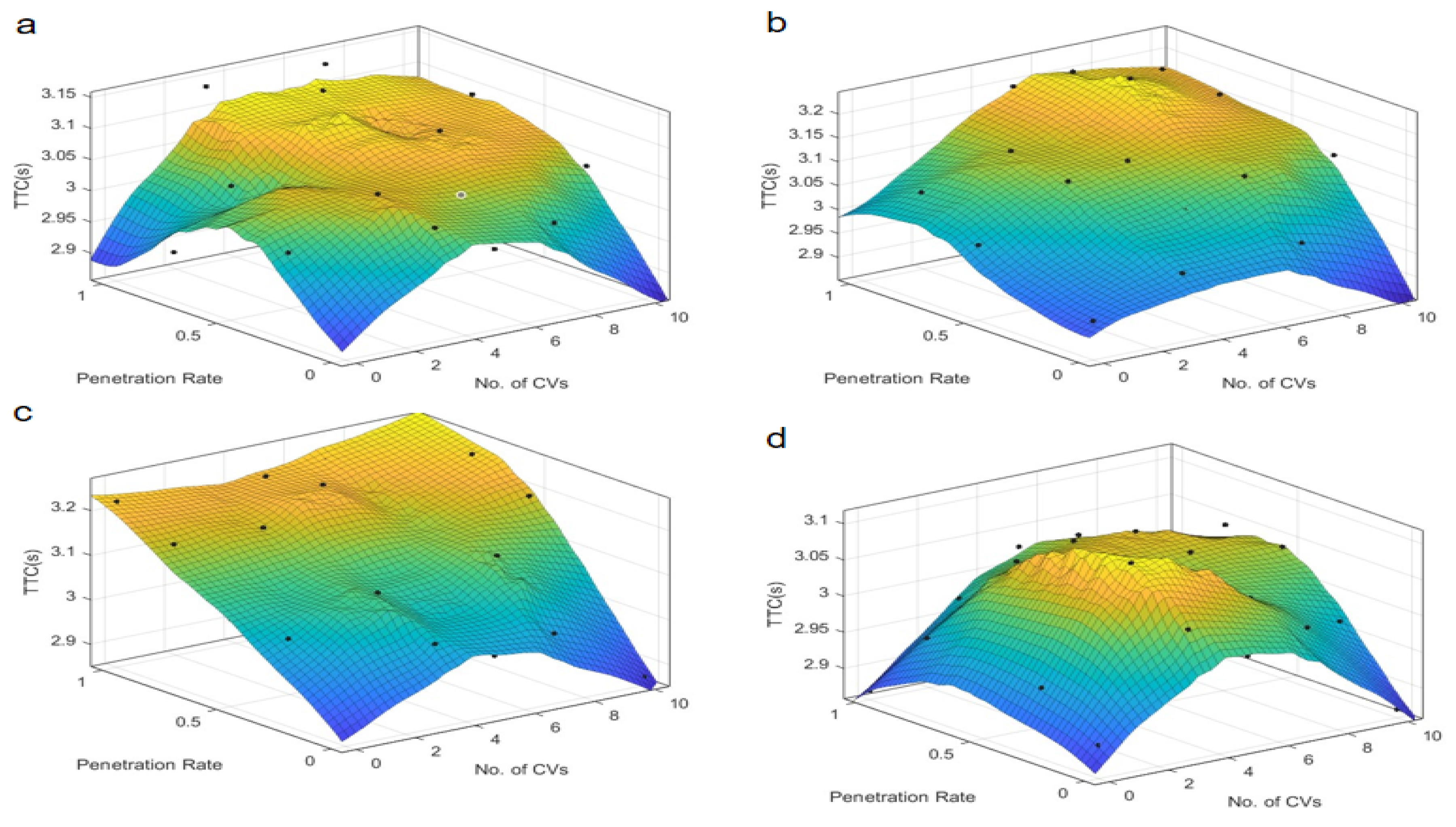
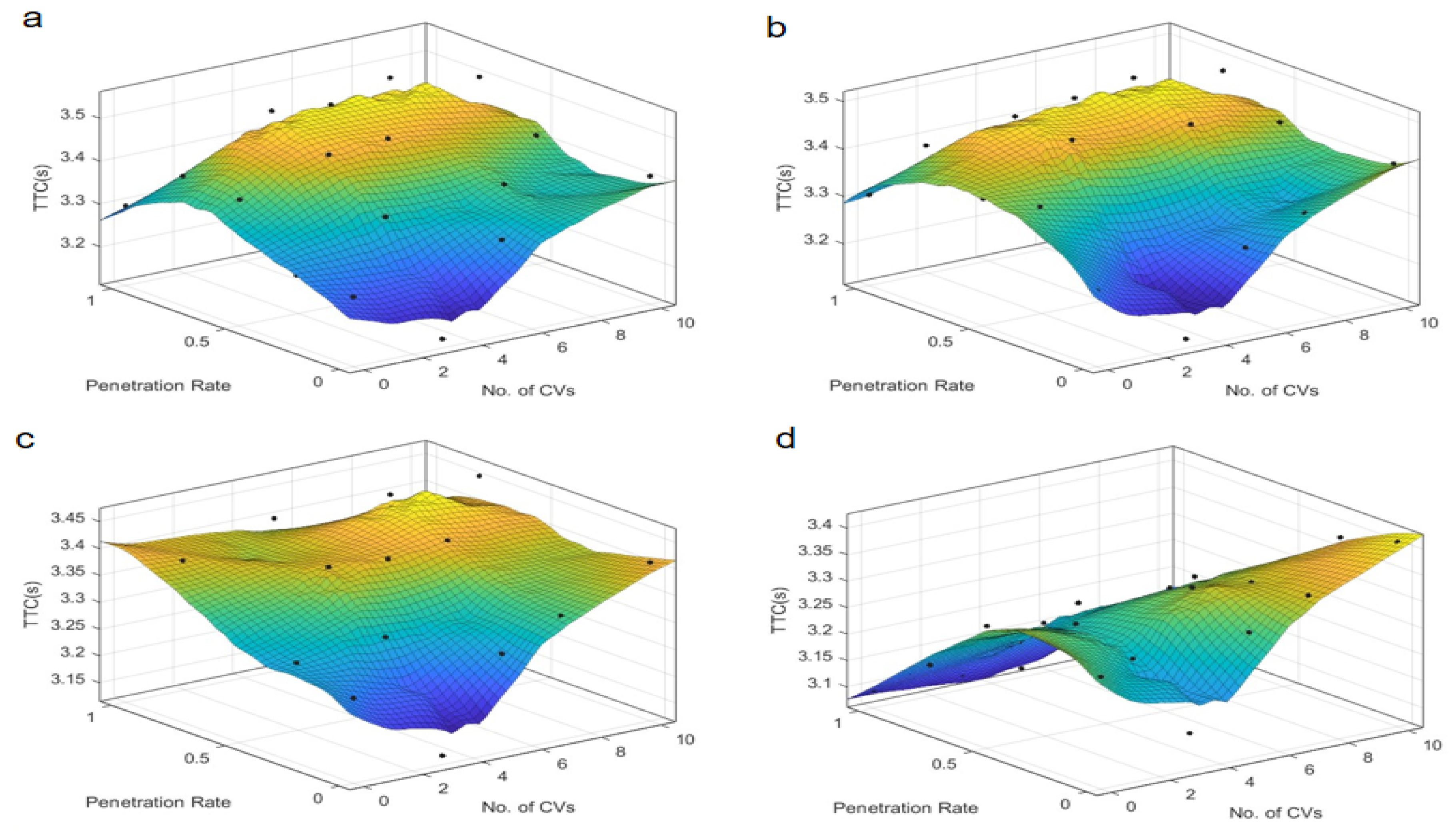
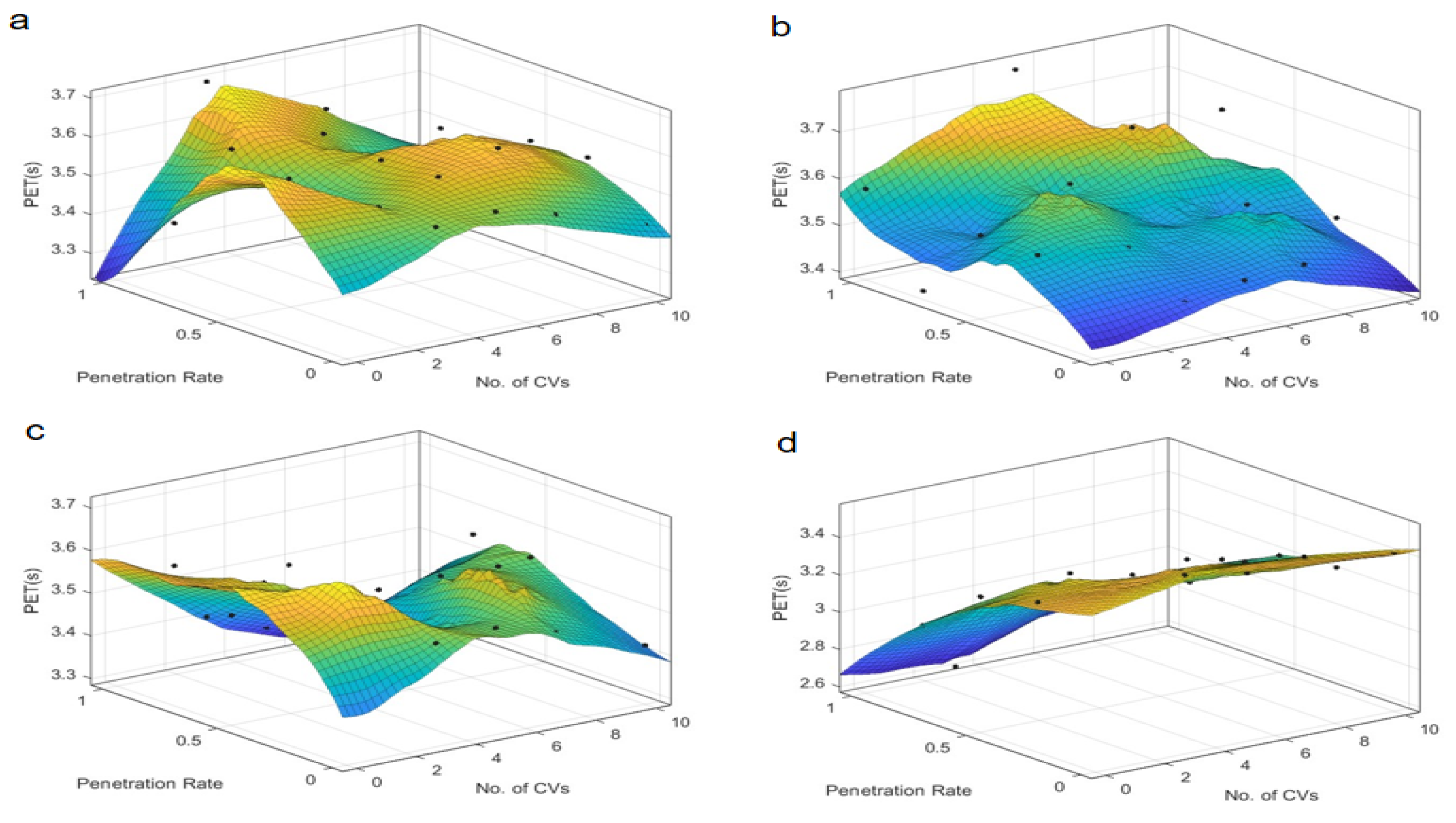
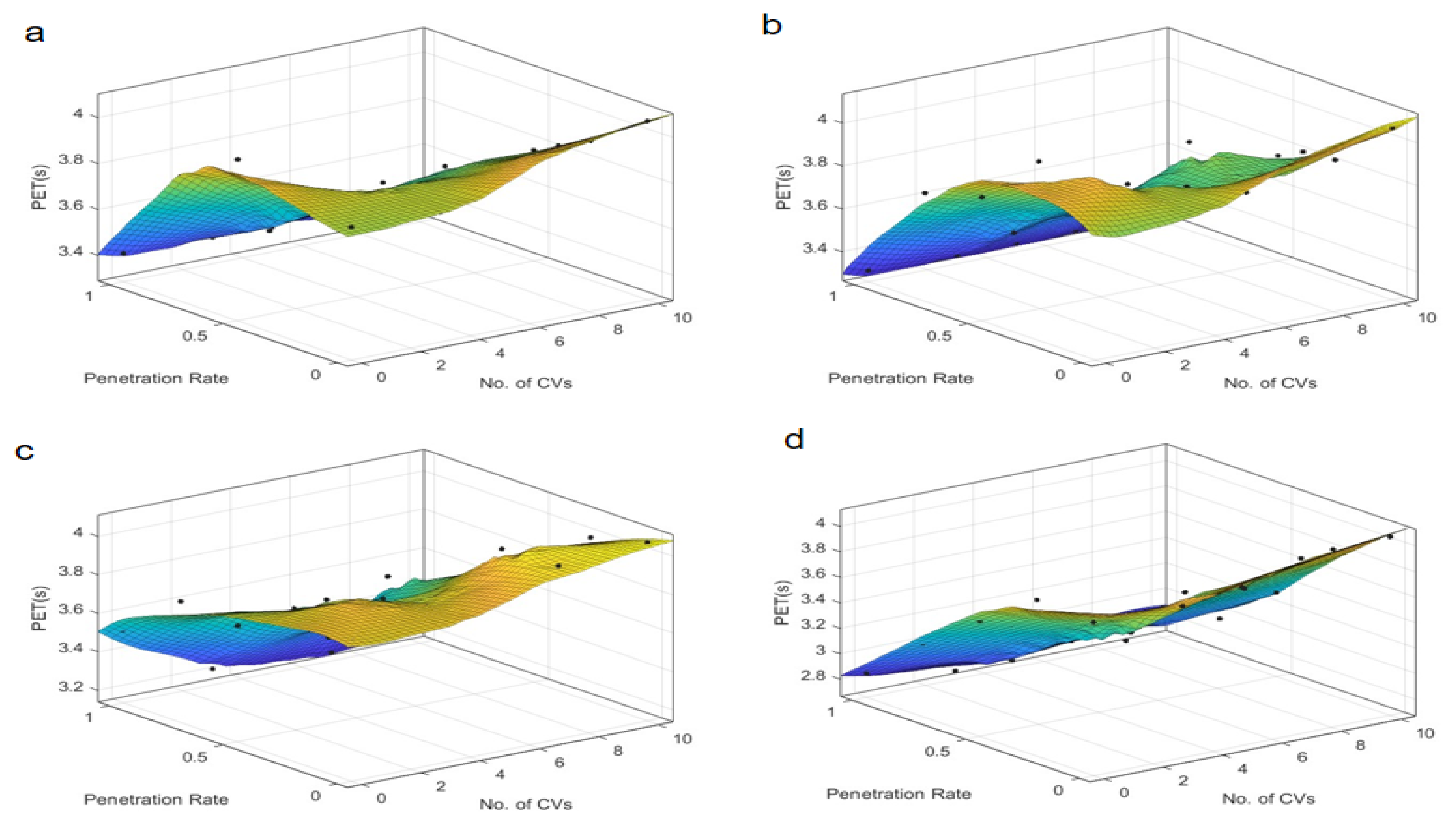
4.1. Time-Based Indicators
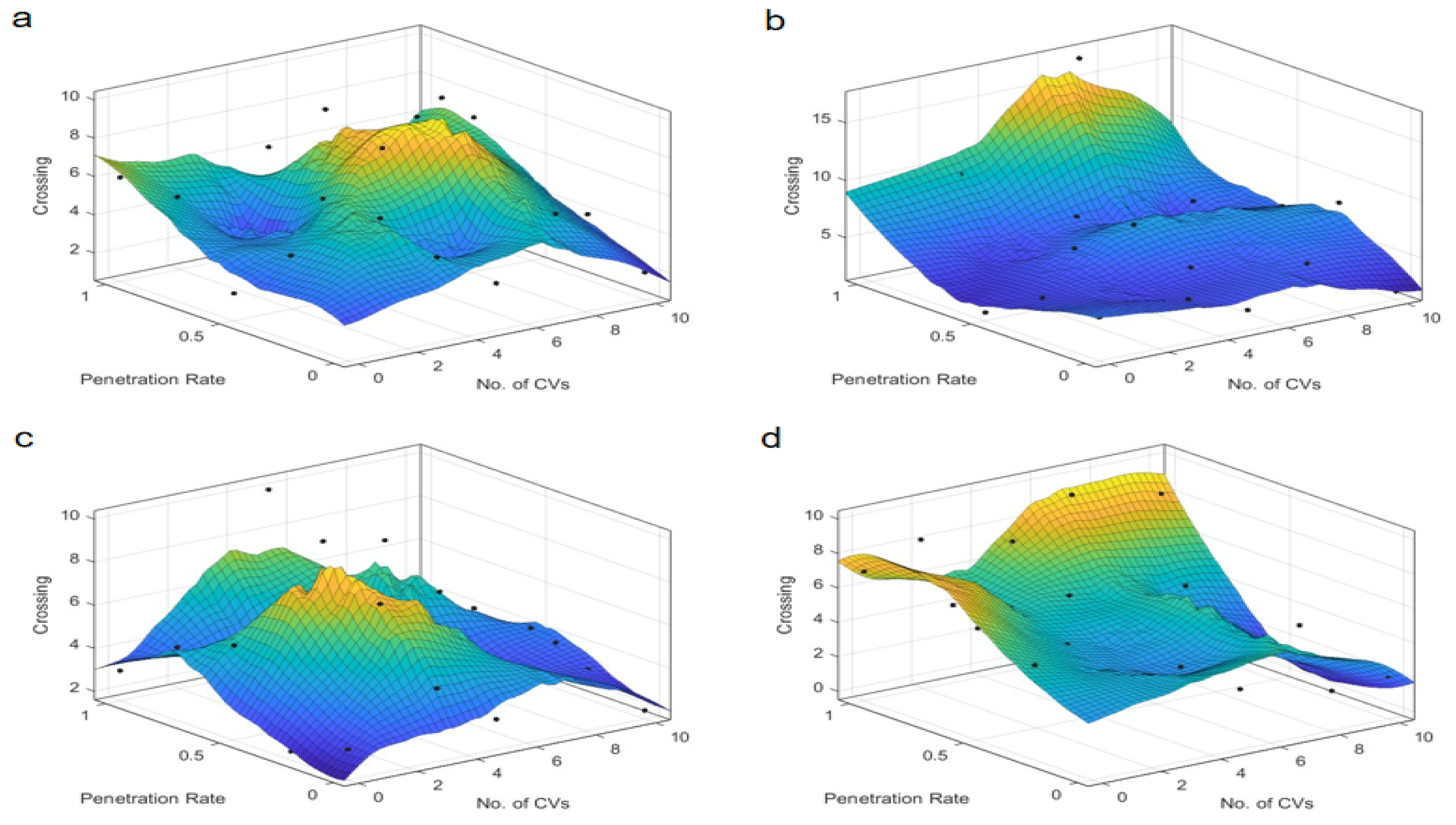
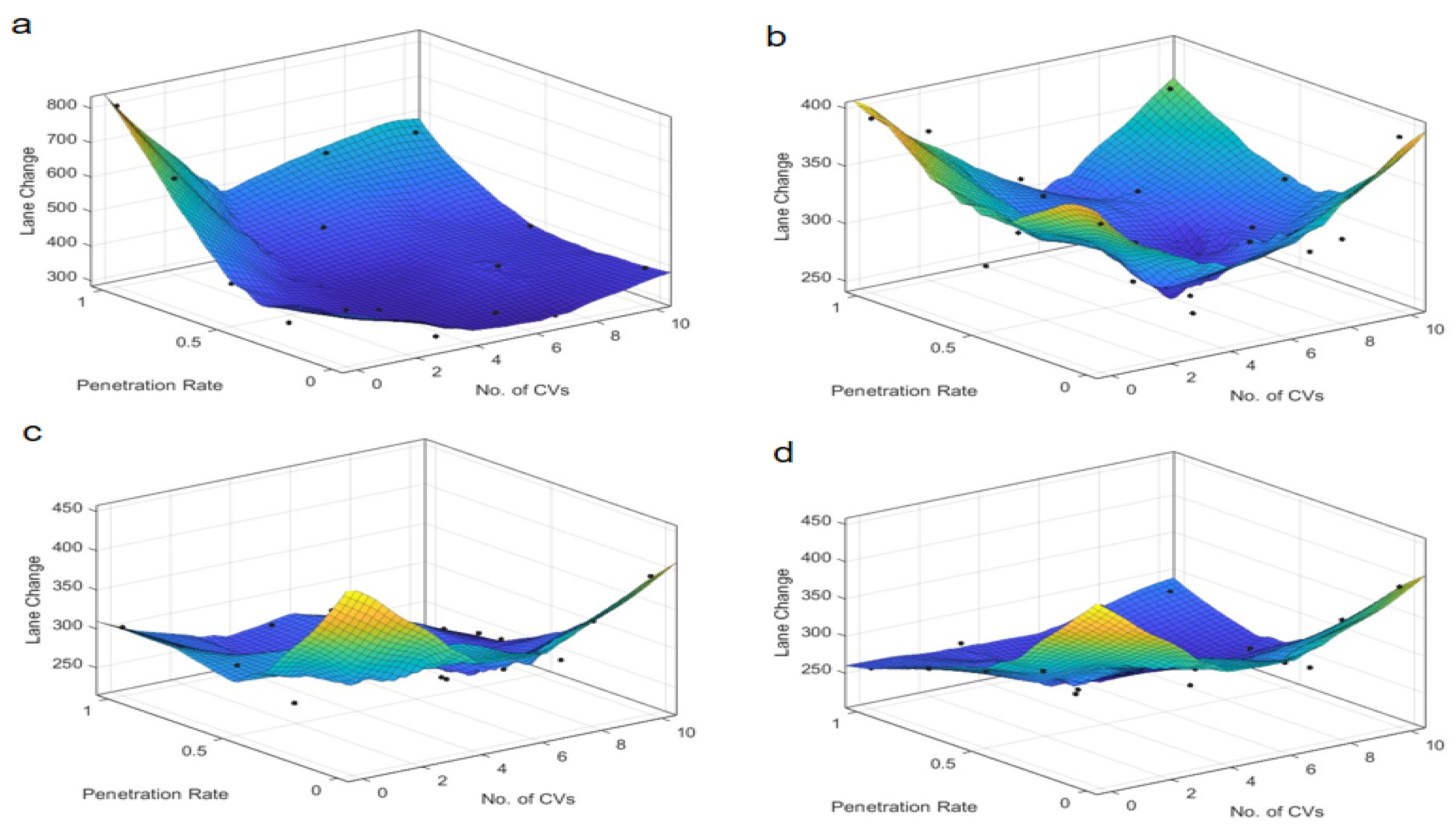
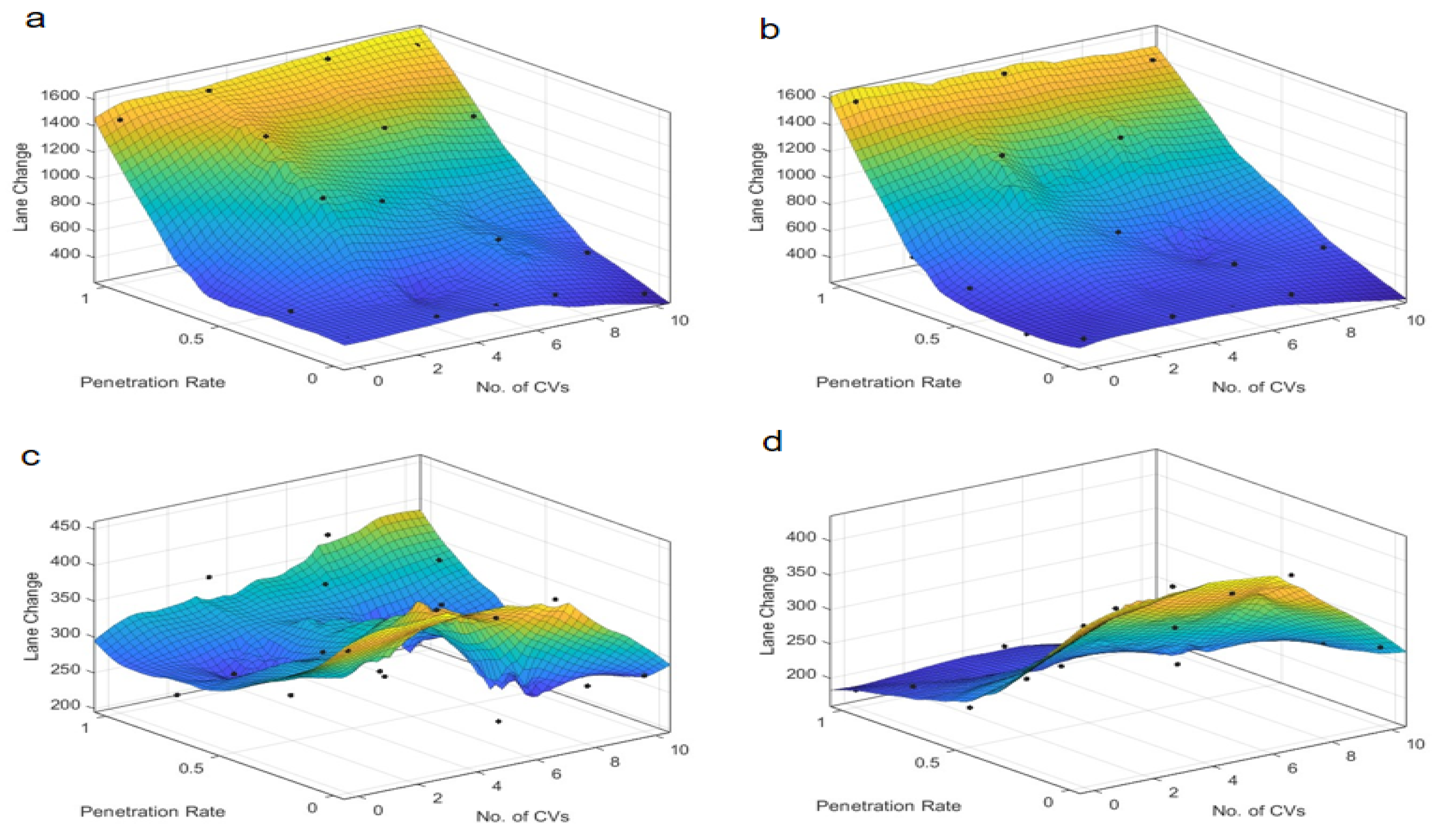
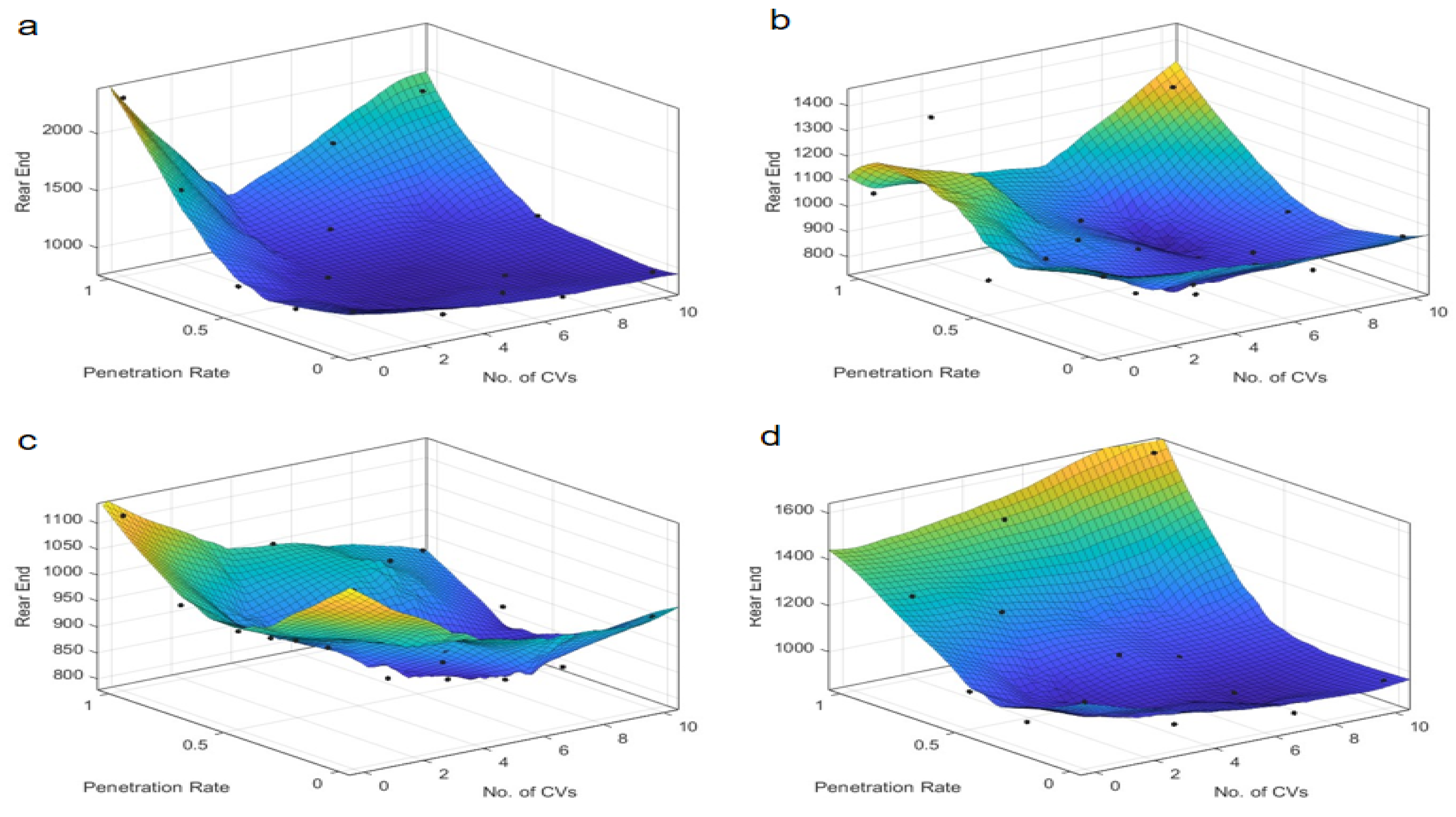
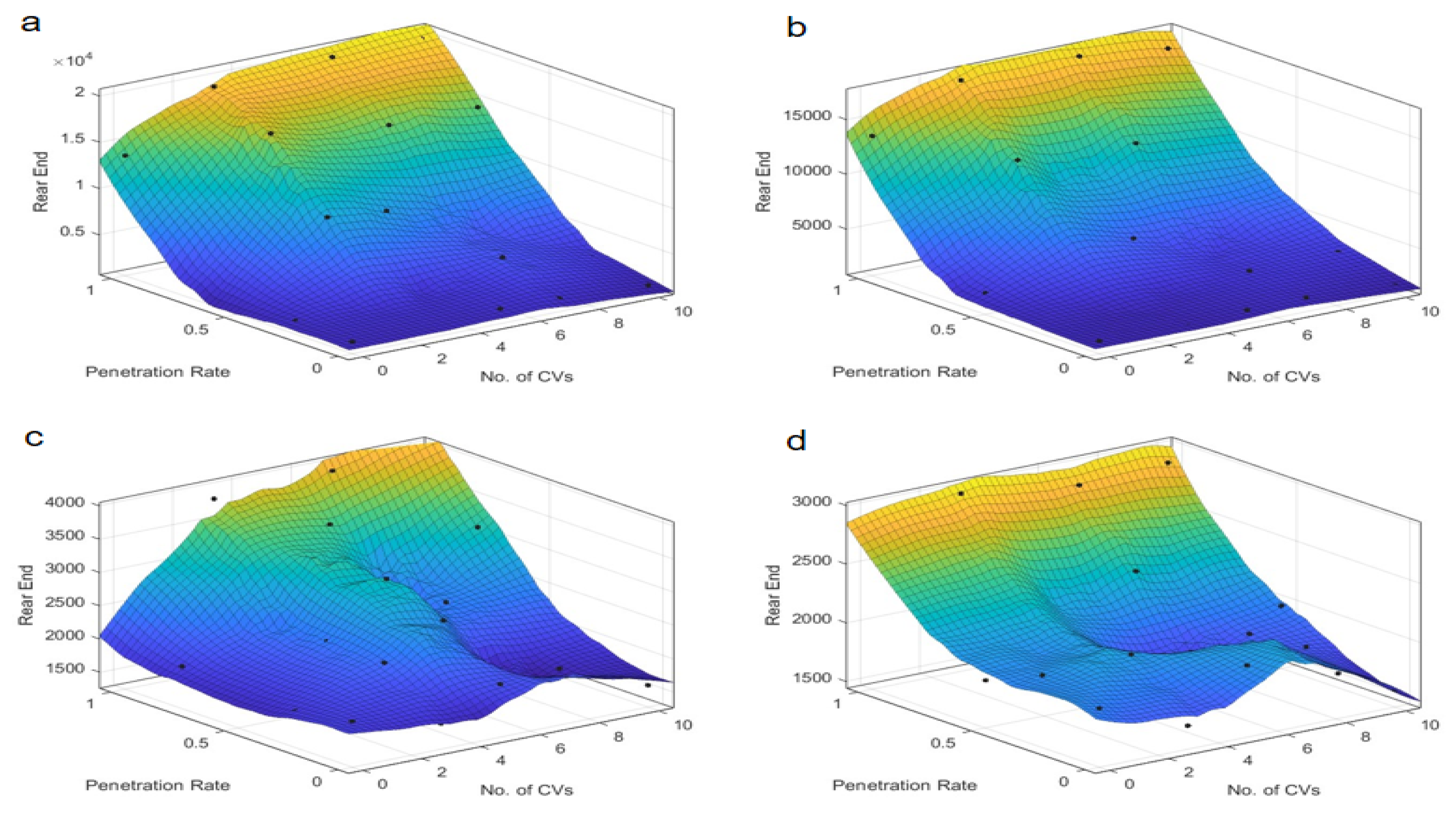
4.2. Number of Conflicts
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Unit | Description |
|---|---|---|
| CC0 | m | Standstill distance: The desired standstill distance between two vehicles. No stochastic variation. |
| CC1 | s | Gap time distribution: Time distribution from which the gap time in seconds is drawn which a driver wants to maintain in addition to the standstill distance. |
| CC2 | m | “Following” distance oscillation: Maximum additional distance beyond the desired safety distance accepted by a driver following another vehicle before intentionally moving closer. |
| CC3 | s | Threshold for entering “BrakeBX”: Time in seconds before reaching the maximum safety distance (assuming constant speed) to a leading slower vehicle at the beginning of the deceleration process (negative value). |
| CC4 | m/s | Negative speed difference: Lower threshold for relative speed compared to slower leading vehicle during the following process (negative value). |
| CC5 | m/s | Positive speed difference: Relative speed limit compared to faster leading vehicle during the following process (positive value). |
| CC6 | 1/(m·s) | Distance impact on oscillation: Impact of distance on limits of relative speed during following process: Value 0: Distance has no impact on limits. Larger values: Limits increase with increasing distance. |
| CC7 | m/s2 | Oscillation acceleration: Acceleration oscillation during the following process. |
| CC8 | m/s2 | Acceleration from standstill: Acceleration when starting from standstill. Is limited by the desired and maximum acceleration functions assigned to the vehicle type. |
| CC9 | m/s2 | Acceleration at 80 km/h: Acceleration at 80 km/h is limited by the desired and maximum acceleration functions assigned to the vehicle type. |
References
- Namazi, E.; Li, J.; Lu, C. Intelligent Intersection Management Systems Considering Autonomous Vehicles: A Systematic Literature Review. IEEE Access 2019, 7, 91946–91965. [Google Scholar] [CrossRef]
- Khayatian, M.; Mehrabian, M.; Andert, E.; Dedinsky, R.; Choudhary, S.; Lou, Y.; Shirvastava, A. A Survey on Intersection Management of Connected Autonomous Vehicles. ACM Trans. Cyber-Phys. Syst. 2020, 4, 48. [Google Scholar]
- Zhang, Y.; Liu, L.; Lu, Z.; Wang, L.; Wen, X. Robust Autonomous Intersection Control Approach for Connected Autonomous Vehicles. IEEE Access 2020, 8, 124486–124502. [Google Scholar] [CrossRef]
- Chen, R.; Hu, J.; Levin, M.W.; Rey, D. Stability-Based Analysis of Autonomous Intersection Management with Pedestrians. Transp. Res. Part C Emerg. Technol. 2020, 114, 463–483. [Google Scholar] [CrossRef]
- Dresner, K.; Stone, P. A Multiagent Approach to Autonomous Intersection Management. J. Artif. Intell. Res. 2008, 31, 591–656. [Google Scholar] [CrossRef]
- Aoki, S.; Rajkumar, R. Safe Intersection Management With Cooperative Perception for Mixed Traffic of Human-Driven and Autonomous Vehicles. IEEE Open J. Veh. Technol. 2022, 3, 251–265. [Google Scholar] [CrossRef]
- Li, K.; Zhou, J.; Jia, C.; Yi, F.; Zhang, C. Energy sources durability energy management for fuel cell hybrid electric bus based on deep reinforcement learning considering future terrain information. Int. J. Hydrogen Energy 2024, 52, 821–833. [Google Scholar] [CrossRef]
- Li, S.; Shu, K.; Chen, C.; Cao, D. Planning and Decision-Making for Connected Autonomous Vehicles at Road Intersections: A Review. Chin. J. Mech. Eng. 2021, 34, 133. [Google Scholar] [CrossRef]
- Zhong, Z.; Nejad, M.; Lee, E.E. Autonomous and Semiautonomous Intersection Management: A Survey. IEEE Intell. Transp. Syst. Mag. 2021, 13, 53–70. [Google Scholar] [CrossRef]
- Al-Turki, M.; Ratrout, N.T.; Rahman, S.M.; Assi, K.J. Signalized Intersection Control in Mixed Autonomous and Regular Vehicles Traffic Environment—A Critical Review Focusing on Future Control. IEEE Access 2022, 10, 16942–16951. [Google Scholar] [CrossRef]
- Gholamhosseinian, A.; Seitz, J. A Comprehensive Survey on Cooperative Intersection Management for Heterogeneous Connected Vehicles. IEEE Access 2022, 10, 7937–7972. [Google Scholar] [CrossRef]
- Lu, G.; Shen, Z.; Liu, X.; Nie, Y.M.; Xiong, Z. Are Autonomous Vehicles Better off without Signals at Intersections? A Comparative Computational Study. Transp. Res. Part B Methodol. 2022, 155, 26–46. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, P.; Lu, G. Cooperative Autonomous Traffic Organization Method for Connected Automated Vehicles in Multi-Intersection Road Networks. Transp. Res. Part C Emerg. Technol. 2020, 111, 458–476. [Google Scholar] [CrossRef]
- Wang, M.I.; Wen, C.H.; Chao, H.J. Roadrunner+: An Autonomous Intersection Management Cooperating with Connected Autonomous Vehicles and Pedestrians with Spillback Considered. ACM Trans. Cyber-Phys. Syst. 2021, 6, 5. [Google Scholar] [CrossRef]
- Wu, W.; Liu, Y.; Liu, W.; Zhang, F.; Dixit, V.; Waller, S.T. Autonomous Intersection Management for Connected and Automated Vehicles: A Lane-Based Method. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15091–15106. [Google Scholar] [CrossRef]
- Vitale, C.; Kolios, P.; Ellinas, G. Autonomous Intersection Crossing with Vehicle Location Uncertainty. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17546–17561. [Google Scholar] [CrossRef]
- Noh, S. Decision-Making Framework for Autonomous Driving at Road Intersections: Safeguarding Against Collision, Overly Conservative Behavior, and Violation Vehicles. IEEE Trans. Ind. Electron. 2019, 66, 3275–3286. [Google Scholar] [CrossRef]
- Karthikeyan, P.; Chen, W.L.; Hsiung, P.A. Autonomous Intersection Management by Using Reinforcement Learning. Algorithms 2022, 15, 326. [Google Scholar] [CrossRef]
- Xia, C.; Xing, M.; He, S. Interactive Planning for Autonomous Driving in Intersection Scenarios Without Traffic Signs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 24818–24828. [Google Scholar] [CrossRef]
- Aoki, S.; Rajkumar, R. Cyber Traffic Light: Safe Cooperation for Autonomous Vehicles at Dynamic Intersections. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22519–22534. [Google Scholar] [CrossRef]
- Jia, C.; Zhou, J.; He, H.; Li, J.; Wei, Z.; Li, K. Health-conscious deep reinforcement learning energy management for fuel cell buses integrating environmental and look-ahead road information. Energy 2023, 260, 130146. [Google Scholar] [CrossRef]
- Jia, C.; Liu, W.; He, H.; Chau, K. Deep reinforcement learning-based energy management strategy for fuel cell buses integrating future road information and cabin comfort control. Energy Convers. Manag. 2024, 321, 119032. [Google Scholar] [CrossRef]
- Maryam Mousavi, S.; Lord, D.; Dadashova, B.; Reza Mousavi, S. Can Autonomous Vehicles Enhance Traffic Safety at Unsignalized Intersections? In Proceedings of the International Conference on Transportation and Development, Seattle, WA, USA, 26–29 May 2020; pp. 194–206. [Google Scholar]
- Pourjafari, N.; Ghafari, A.; Ghaffari, A. Navigating Unsignalized Intersections: A Predictive Approach for Safe and Cautious Autonomous Driving. IEEE Trans. Intell. Veh. 2024, 9, 269–278. [Google Scholar] [CrossRef]
- Virdi, N.; Grzybowska, H.; Waller, S.T.; Dixit, V. A Safety Assessment of Mixed Fleets with Connected and Autonomous Vehicles Using the Surrogate Safety Assessment Module. Accid. Anal. Prev. 2019, 131, 95–111. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, X.; Wang, X.; Zheng, N. Safety Validation for Connected Autonomous Vehicles Using Large-Scale Testing Tracks in High-Fidelity Simulation Environment. Accid. Anal. Prev. 2025, 215, 108011. [Google Scholar] [CrossRef]
- Sukennik, P.; Kautzsch, L. Deliverable 2.3 Default Behavioural Parameter Sets for Automated Vehicles (AVs). PTV Group. 2018. Available online: https://www.rupprecht-consult.eu/fileadmin/user_upload/D2.3-default-behavioural-parameter-sets_final.pdf (accessed on 25 November 2024).
- PTVVISSIM. Defining the Wiedemann 99 Model Parameters. Available online: https://cgi.ptvgroup.com/vision-help/VISSIM_2023_ENG/Content/4_BasisdatenSim/FahrverhaltensparameterFolgeverh_Wied99.htm (accessed on 25 November 2024).


| Parameter | Rail Safe | Cautious | Normal | All-Knowing | HV |
|---|---|---|---|---|---|
| CC0 | 1.5 | 1.5 | 1.5 | 1 | 1.5 |
| CC1 | 1.5 | 1.5 | 0.9 | 0.6 | 0.9 |
| CC2 | 0 | 0 | 0 | 0 | 4 |
| CC3 | −10 | −10 | −8 | −6 | −8 |
| CC4 | −0.1 | −0.1 | −0.1 | −0.1 | −0.35 |
| CC5 | 0.1 | 0.1 | 0.1 | 0.1 | 0.35 |
| CC6 | 0 | 0 | 0 | 0 | 11.44 |
| CC7 | 0.1 | 0.1 | 0.1 | 0.1 | 0.25 |
| CC8 | 2 | 3 | 3.5 | 4 | 3.50 |
| CC9 | 1.2 | 1.2 | 1.5 | 2 | 1.50 |
| Maximum deceleration | −4/−3 | −3.5/−2.5 | −4/−3 | −4/−4 | −4/−3 |
| −1 m/s per distance | 100/100 | 80/80 | 100/100 | 100/100 | 100/100 |
| Accepted deceleration | −1/−1 | −1/−1 | −1/−1 | −1/−1.5 | −1/−1 |
| Min. headway (front/rear) | 1 | 0.5 | 0.5 | 0.5 | 0.5 |
| Max. deceleration for cooperative braking | −2.5 | −3 | −6 | −3 | −3 |
| Behavior at amber signal | continuous check | continuous check | one decision | one decision | continuous check |
| Reduced safety distance factor | 1 | 1 | 1 | 1 | 0.6 |
| Reduced safety start upstream of stop line | 100 | 100 | 100 | 100 | 100 |
| Reduced safety end upstream of stop line | 100 | 100 | 100 | 100 | 100 |
| Parameter Name | Description | Units | |
|---|---|---|---|
| Time-based Indicators | TTC | Time-to-Collision: The minimum time before a potential collision occurs. | Seconds |
| PET | Post-Encroachment Time: The minimum time after an encroachment on the traffic space before a potential collision. | Seconds | |
| Number of Conflicts | NoLC | Number of Lane-Change Conflicts: The count of conflicts arising from lane-changing maneuvers. | Counts |
| NoRE | Number of Rear-End Conflicts: The count of conflicts involving potential rear-end collisions. | Counts | |
| NoPC | Number of Path-Crossing Conflicts: The count of conflicts involving path crossings. | Counts |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Yao, Y.; Zhang, L. Optimizing Autonomous Taxi Deployment for Safety at Skewed Intersections: A Simulation Study. Sensors 2025, 25, 3544. https://doi.org/10.3390/s25113544
Yang Z, Yao Y, Zhang L. Optimizing Autonomous Taxi Deployment for Safety at Skewed Intersections: A Simulation Study. Sensors. 2025; 25(11):3544. https://doi.org/10.3390/s25113544
Chicago/Turabian StyleYang, Zi, Yaojie Yao, and Liyan Zhang. 2025. "Optimizing Autonomous Taxi Deployment for Safety at Skewed Intersections: A Simulation Study" Sensors 25, no. 11: 3544. https://doi.org/10.3390/s25113544
APA StyleYang, Z., Yao, Y., & Zhang, L. (2025). Optimizing Autonomous Taxi Deployment for Safety at Skewed Intersections: A Simulation Study. Sensors, 25(11), 3544. https://doi.org/10.3390/s25113544