
String Stability Analysis and Design Guidelines for PD Controllers in Adaptive Cruise Control Systems


Abstract
1. Introduction
1.1. Adaptive Cruise Control
1.2. Background and Related Work
1.3. Contributions of the Paper
1.4. Organization of the Paper
2. Problem Formulations
2.1. Adaptive Cruise Control and Constant Time-Gap Policy
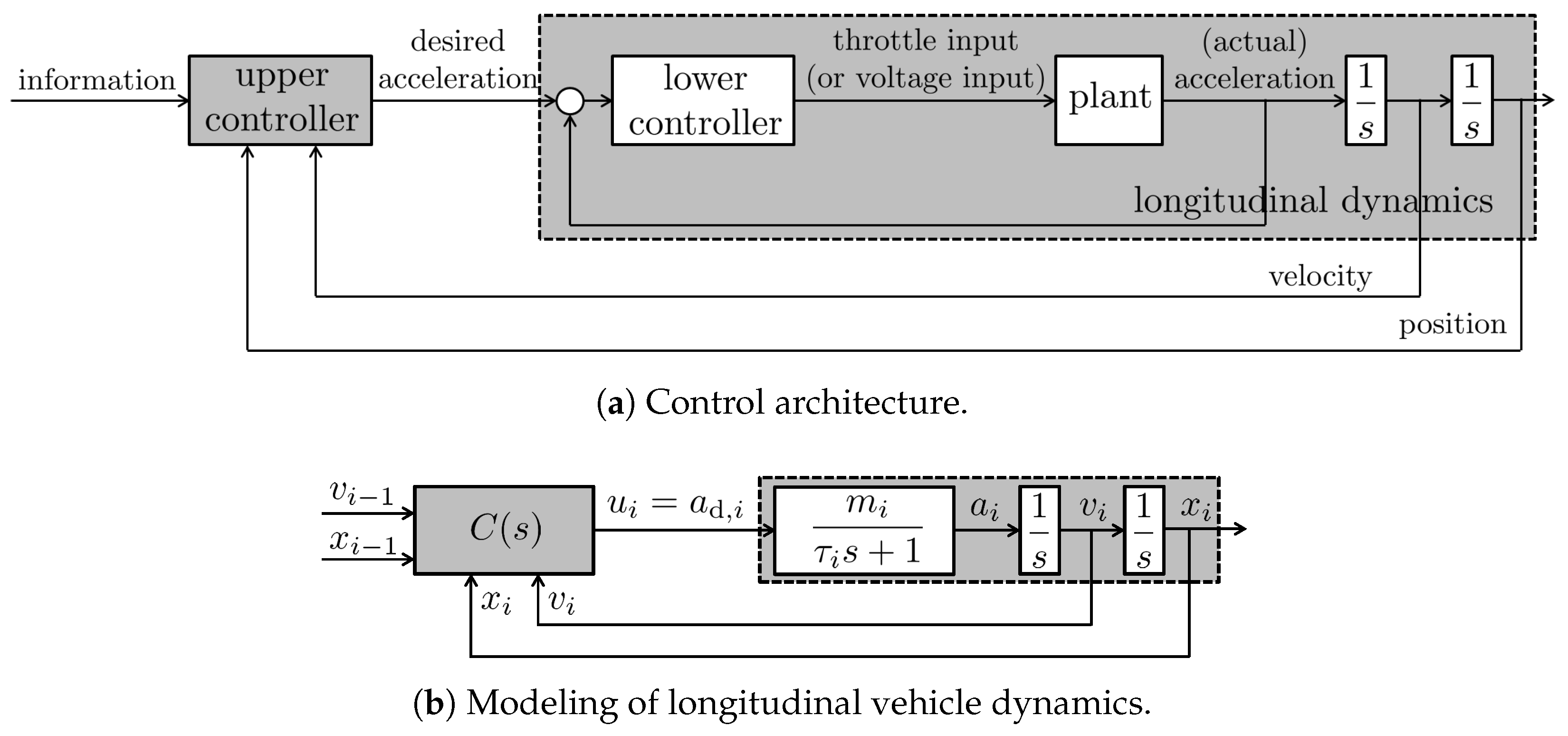
2.2. Longitudinal Vehicle Dynamics
2.3. Individual Vehicle Stability and String Stability
2.4. Control Problem Statement
- (1)
- Individual vehicle stability: Each vehicle must be capable of regulating its own spacing error so that it asymptotically converges to zero when the preceding vehicle travels at a constant velocity, as defined in Definition 1.
- (2)
- String stability: The spacing errors propagated along the vehicle string must not be amplified, ensuring that disturbances introduced by one vehicle do not degrade the performance of downstream vehicles, as formalized in Definition 2.
3. Necessary and Sufficient Conditions for Stability
3.1. Frequency Domain Analysis of ACC Control System
3.2. Individual Vehicle Stability for ACC
3.3. String Stability for ACC
- (c1)
- and ,
- (c2)
- and .
3.4. Summary of Stability Conditions
4. Design of PD Controller for ACC
- (1)
- The characteristic polynomial in (12) is Hurwitz, ensuring individual vehicle stability;
- (2)
4.1. Determination of Proportional (P) Gain for ACC
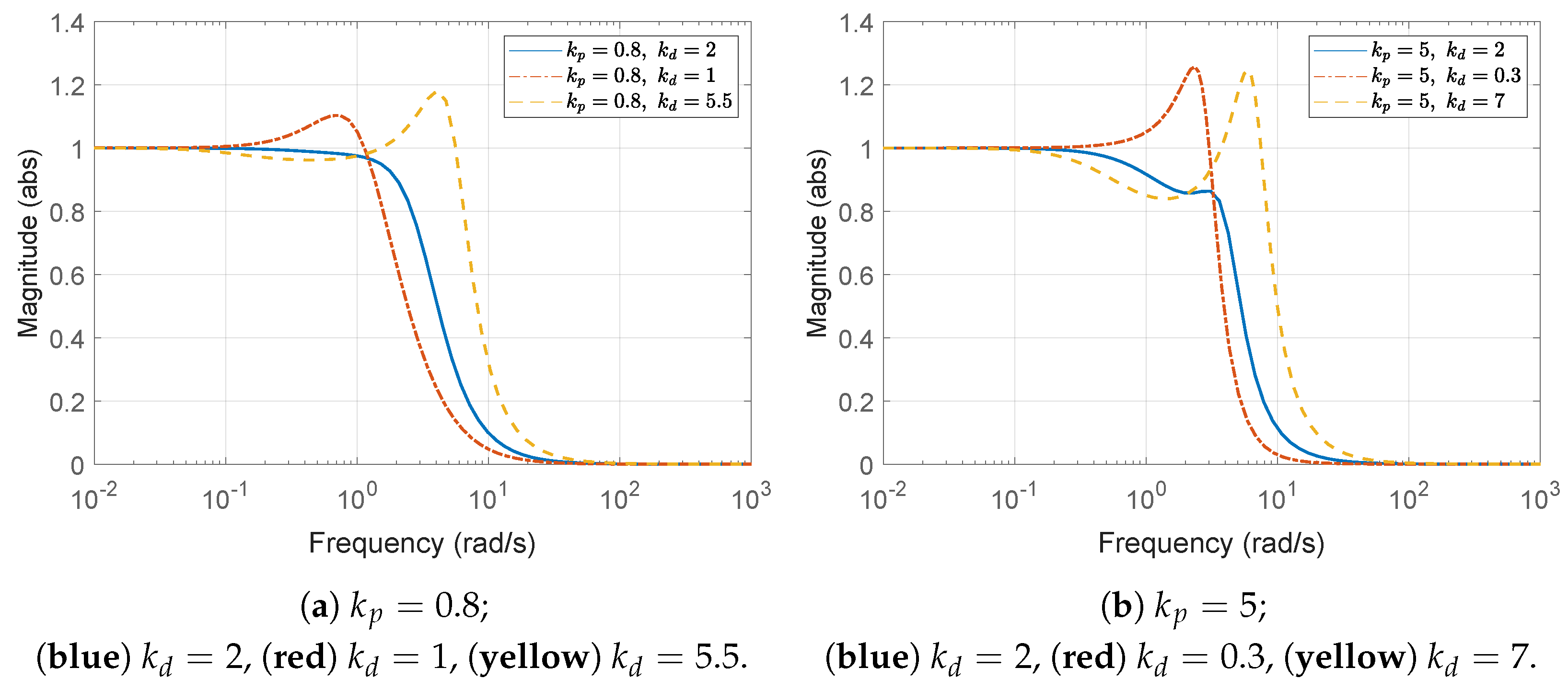
4.2. Determination of Derivative (D) Gain for ACC
4.3. Summary of Design Guideline for ACC
| Algorithm 1: Design guideline for individual vehicle stability and string stability |
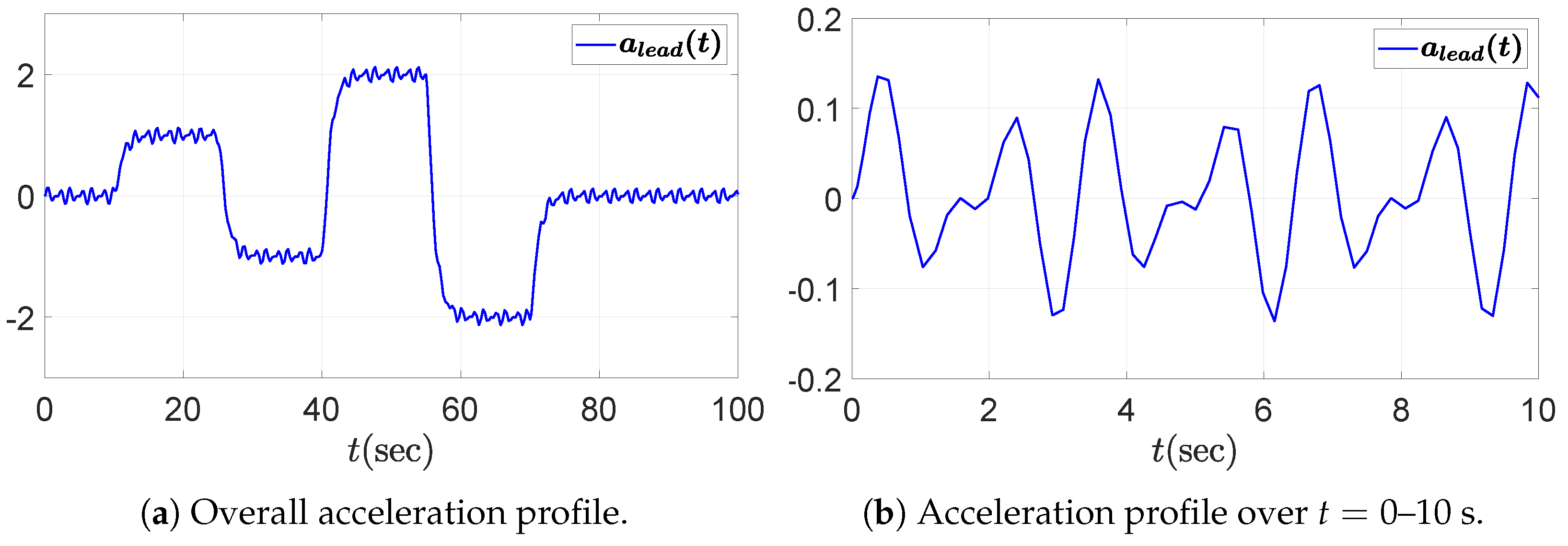
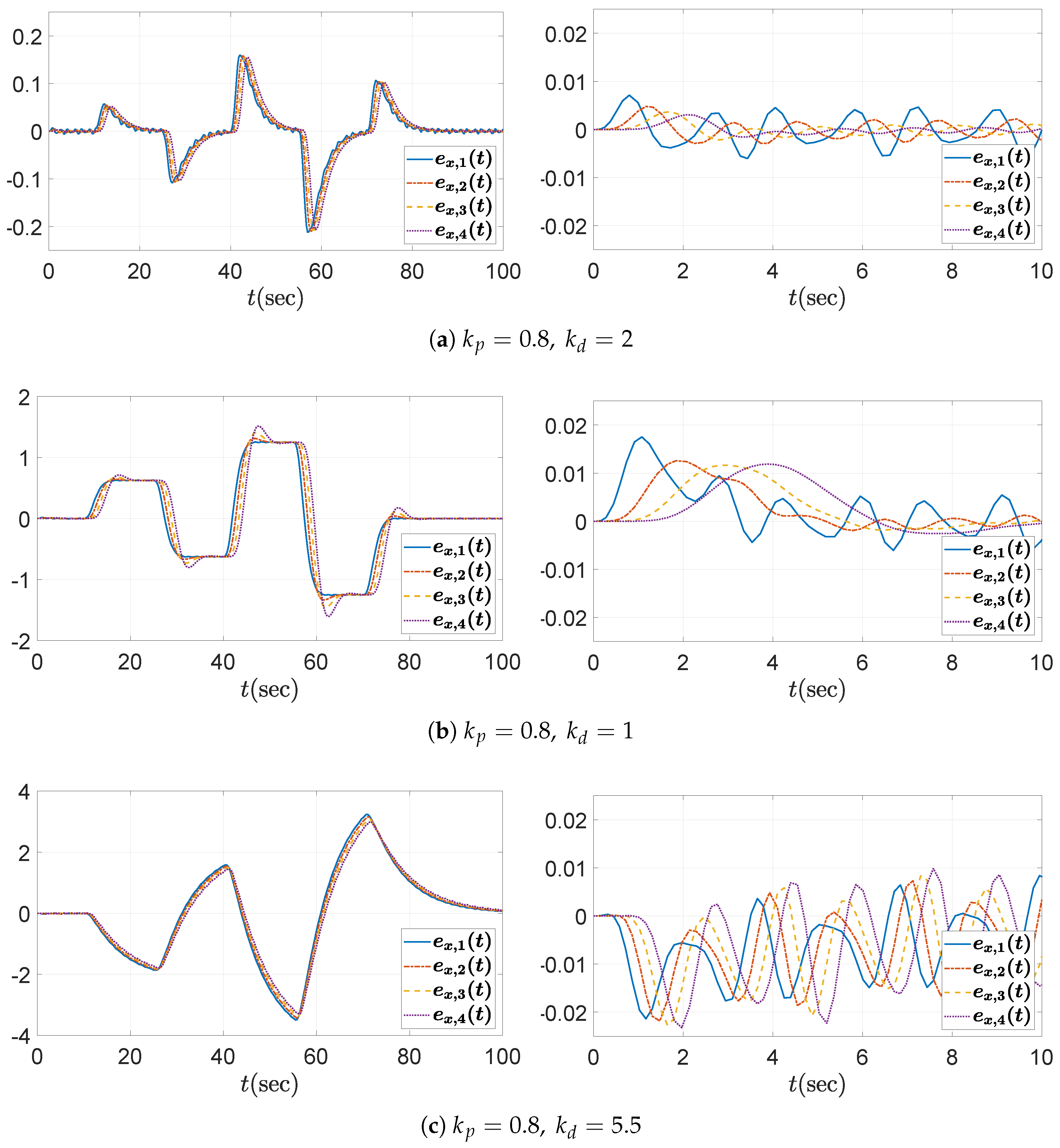
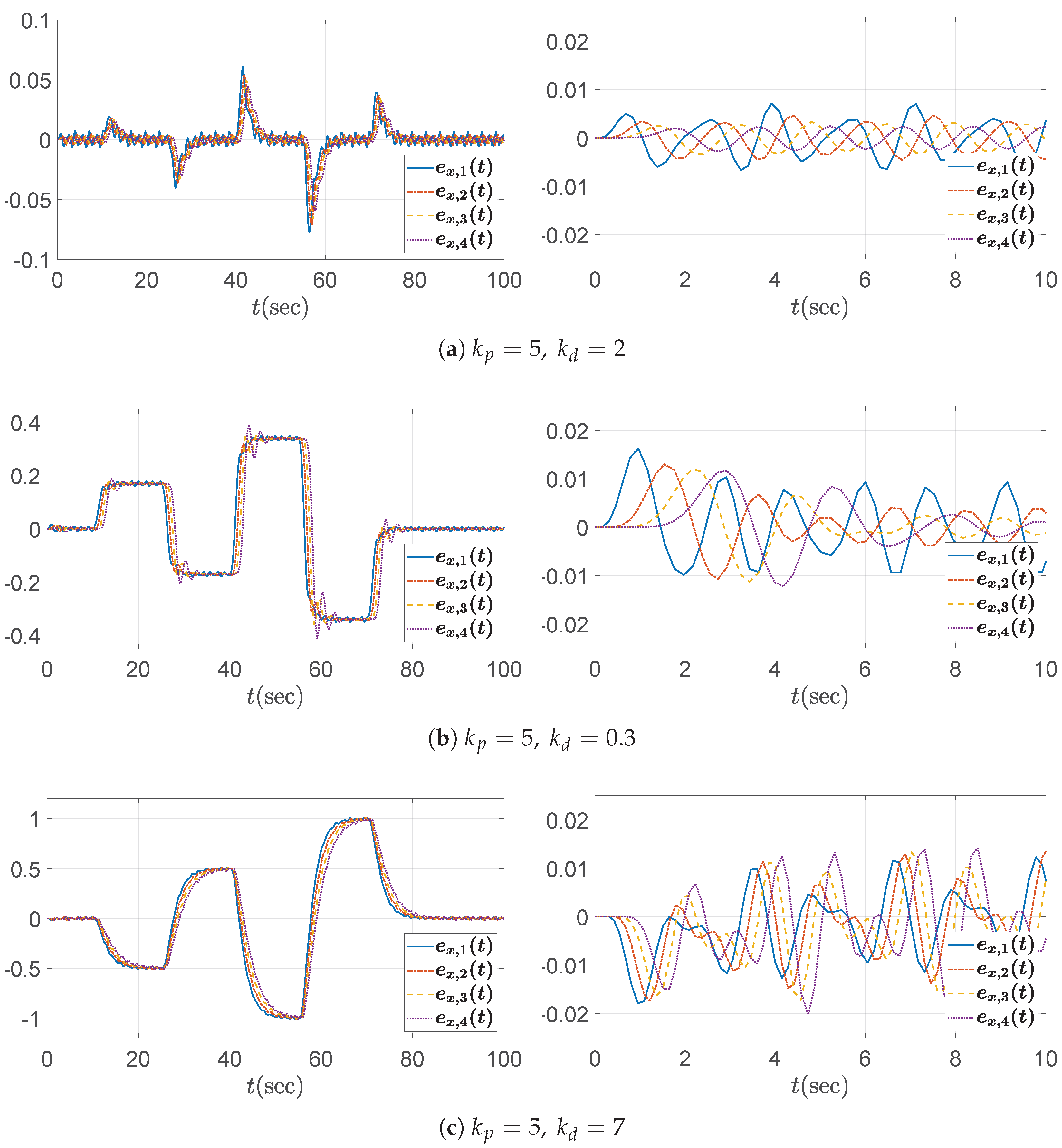
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Marsden, G.; McDonald, M.; Brackstone, M. Towards an understanding of adaptive cruise control. Transp. Res. Part C Emerg. Technol. 2001, 9, 33–51. [Google Scholar] [CrossRef]
- Pananurak, W.; Thanok, S.; Parnichkun, M. Adaptive cruise control for an intelligent vehicle. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009; pp. 1794–1799. [Google Scholar]
- Xiao, L.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Veh. Syst. Dyn. 2010, 48, 1167–1192. [Google Scholar] [CrossRef]
- Yu, L.; Wang, R. Researches on Adaptive Cruise Control system: A state of the art review. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 211–240. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Wang, H.; Wang, W.; Xing, L. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways. Accid. Anal. Prev. 2017, 104, 137–145. [Google Scholar] [CrossRef]
- Iden, R.; Shappell, S.A. A human error analysis of US fatal highway crashes 1990–2004. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, San Francisco, CA, USA, 16–20 October 2006; pp. 2000–2003. [Google Scholar]
- Penumaka, A.P.; Savino, G.; Baldanzini, N.; Pierini, M. In-depth investigations of PTW-car accidents caused by human errors. Saf. Sci. 2014, 68, 212–221. [Google Scholar] [CrossRef]
- Hamid, A.A.; Ishak, N.S.; Roslan, M.F.; Abdullah, K.H. Tackling human error in road crashes: An evidence-based review of causes and effective mitigation strategies. J. Metrics Stud. Soc. Sci. 2023, 2, 1–9. [Google Scholar]
- Dvorkin, W.; King, J.; Gray, M.; Jao, S. Determining the Greenhouse Gas Emissions Benefit of an Adaptive Cruise Control System Using Real-World Driving Data; SAE Technical Paper, No. 2019-01-0310; SAE International: Warrendale, PA, USA, 2019. [Google Scholar]
- Ramakers, R.; Henning, K.; Gies, S.; Abel, D.; Max, H.M. Electronically coupled truck platoons on German highways. In Proceedings of the 2009 IEEE International Conference on Systems, Man and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 2409–2414. [Google Scholar]
- Tsugawa, S. An overview on an automated truck platoon within the energy ITS project. In Proceedings of the 7th IFAC Symposium on Advances in Automotive Control, Tokyo, Japan, 4–7 September 2013; pp. 41–46. [Google Scholar]
- Alam, A.; Besselink, B.; Turri, V.; Mårtensson, J.; Johansson, K.H. Heavy-duty vehicle platooning for sustainable freight transportation: A cooperative method to enhance safety and efficiency. IEEE Control Syst. Mag. 2015, 35, 34–56. [Google Scholar]
- Van de Hoef, S. Coordination of Heavy-Duty Vehicle Platooning. Ph.D. Dissertation, KTH Royal Institute of Technology, Stockholm, Sweden, 2018. [Google Scholar]
- Zhang, L.; Chen, F.; Ma, X.; Pan, X. Fuel economy in truck platooning: A literature overview and directions for future research. J. Adv. Transp. 2020, 2020, 2604012. [Google Scholar] [CrossRef]
- Spiliopoulou, A.; Perraki, G.; Papageorgiou, M.; Roncoli, C. Exploitation of ACC systems towards improved traffic flow efficiency on motorways. In Proceedings of the 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems, Naples, Italy, 26–28 June 2017; pp. 37–43. [Google Scholar]
- Tak, S.; Yeo, H. The impact of predictive cruise control on traffic flow and energy consumption. In Computing in Civil Engineering, Proceedings of the 2013 ASCE International Workshop on Computing in Civil Engineering, Los Angeles, CA, USA, 23–25 June 2013; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2013; pp. 403–410. [Google Scholar]
- Dey, K.C.; Yan, L.; Wang, X.; Wang, Y.; Shen, H.; Chowdhury, M.; Yu, L.; Qiu, C.; Soundararaj, V. A review of communication, driver characteristics, and controls aspects of cooperative adaptive cruise control (CACC). IEEE Trans. Intell. Transp. Syst. 2015, 17, 491–509. [Google Scholar] [CrossRef]
- Van Arem, B.; Van Driel, C.J.; Visser, R. The impact of cooperative adaptive cruise control on traffic-flow characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Barth, M.J. A review on cooperative adaptive cruise control (CACC) systems: Architectures, controls, and applications. In Proceedings of the 21st International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018; pp. 2884–2891. [Google Scholar]
- Ploeg, J.; Scheepers, B.T.; Van Nunen, E.; Van de Wouw, N.; Nijmeijer, H. Design and experimental evaluation of cooperative adaptive cruise control. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems, Washington, DC, USA, 5–7 October 2011; pp. 260–265. [Google Scholar]
- Milanes, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative adaptive cruise control in real traffic situations. IEEE Trans. Intell. Transp. Syst. 2013, 15, 296–305. [Google Scholar] [CrossRef]
- Ioannou, P.A.; Chien, C.-C. Autonomous intelligent cruise control. IEEE Trans. Veh. Technol. 1993, 42, 657–672. [Google Scholar] [CrossRef]
- Vahidi, A.; Eskandarian, A. Research advances in intelligent collision avoidance and adaptive cruise control. IEEE Trans. Intell. Transp. Syst. 2004, 4, 143–153. [Google Scholar] [CrossRef]
- Swaroop, D. String Stability of Interconnected Systems: An Application to Platooning in Automated Highway Systems. Ph.D. Dissertation, University of California, Berkeley, Richmond, CA, USA, 1994. [Google Scholar]
- Swaroop, D.; Hedrick, J.K. String stability of interconnected systems. IEEE Trans. Autom. Control 1996, 41, 349–357. [Google Scholar] [CrossRef]
- Eyre, J.; Yanakiev, D.; Kanellakopoulos, I. A simplified framework for string stability analysis of automated vehicles. Veh. Syst. Dyn. 1998, 30, 375–405. [Google Scholar] [CrossRef]
- Liang, C.-Y.; Peng, H. Optimal adaptive cruise control with guaranteed string stability. Veh. Syst. Dyn. 1999, 32, 313–330. [Google Scholar] [CrossRef]
- Feng, S.; Zhang, Y.; Li, S.E.; Cao, Z.; Liu, H.X.; Li, L. String stability for vehicular platoon control: Definitions and analysis methods. Annu. Rev. Control 2019, 47, 81–97. [Google Scholar] [CrossRef]
- Gunter, G.; Gloudemans, D.; Stern, R.E.; McQuade, S.; Bhadani, R.; Bunting, M.; Delle Monache, M.L.; Lysecky, R.; Seibold, B.; Sprinkle, J. Are commercially implemented adaptive cruise control systems string stable? IEEE Trans. Intell. Transp. Syst. 2020, 22, 6992–7003. [Google Scholar] [CrossRef]
- Corona, D.; De Schutter, B. Adaptive cruise control for a SMART car: A comparison benchmark for MPC-PWA control methods. IEEE Trans. Control Syst. Technol. 2008, 16, 365–372. [Google Scholar] [CrossRef]
- Luo, L.-H.; Liu, H.; Li, P.; Wang, H. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. J. Zhejiang Univ. Sci. A 2010, 11, 191–201. [Google Scholar] [CrossRef]
- Zhao, R.; Wong, P.K.; Xie, Z.; Zhao, J. Real-time weighted multi-objective model predictive controller for adaptive cruise control systems. Int. J. Automot. Technol. 2017, 18, 279–292. [Google Scholar] [CrossRef]
- Liu, C.-Z.; Li, L.; Chen, X.; Yong, J.-W.; Cheng, S.; Dong, H.-L. An innovative adaptive cruise control method based on mixed H2/H∞ out-of-sequence measurement observer. IEEE Trans. Intell. Transp. Syst. 2021, 23, 5602–5614. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control, 2nd ed.; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Xiao, L.; Gao, F. Practical string stability of platoon of adaptive cruise control vehicles. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1184–1194. [Google Scholar] [CrossRef]
- Eben Li, S.; Li, K.; Wang, J. Economy-oriented vehicle adaptive cruise control with coordinating multiple objectives function. Veh. Syst. Dyn. 2013, 51, 1–17. [Google Scholar] [CrossRef]
- Li, S.; Li, K.; Rajamani, R.; Wang, J. Model predictive multi-objective vehicular adaptive cruise control. IEEE Trans. Control Syst. Technol. 2010, 19, 556–566. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, S.E.; Wang, J.; Wang, L.Y.; Li, K. Influence of information flow topology on closed-loop stability of vehicle platoon with rigid formation. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems, Qingdao, China, 8–11 October 2014; pp. 2094–2100. [Google Scholar]
- Rajamani, R.; Choi, S.B.; Law, B.; Hedrick, J.; Prohaska, R.; Kretz, P. Design and experimental implementation of longitudinal control for a platoon of automated vehicles. J. Dyn. Syst. Meas. Control 2000, 122, 470–476. [Google Scholar] [CrossRef]
- Dolk, V.S.; Ploeg, J.; Heemels, W.P.M.H. Event-triggered control for string-stable vehicle platooning. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3486–3500. [Google Scholar] [CrossRef]
- Franklin, G.F.; Powell, J.D.; Emami-Naeini, A.; Powell, J.D. Feedback Control of Dynamic Systems, 8th ed.; Pearson: Upper Saddle River, NJ, USA, 2020. [Google Scholar]
- Ohnishi, K. A new servo method in mechatronics. Trans. Jpn. Soc. Electr. Eng. D 1987, 177, 83–86. (In Japanese) [Google Scholar]
- Umeno, T.; Kaneko, T.; Hori, Y. Robust servosystem design with two degrees of freedom and its application to novel motion control of robot manipulators. IEEE Trans. Ind. Electron. 1993, 40, 473–485. [Google Scholar] [CrossRef]
- Shim, H.; Joo, Y.-J. State space analysis of disturbance observer and a robust stability condition. In Proceedings of the 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 2193–2198. [Google Scholar]
- Shim, H.; Jo, N.H. An almost necessary and sufficient condition for robust stability of closed-loop systems with disturbance observer. Automatica 2009, 45, 296–299. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Transfer Function | Original Condition | Condition on Parameter |
|---|---|---|---|
| Individual stability | in (11) | (12) is Hurwitz | (15) |
| String stability | in (10) | (14) | (21) (equivalently, (36) or (40)) |
| Model Parameters | Control Gains | Individual Stability | String Stability | |||||
|---|---|---|---|---|---|---|---|---|
| (15a) | >(15b) | (c1) in (21) | (c2) in (21) | |||||
| 1 | 0.2 | 0.5 | 0.8 | 2 | ◯ | ◯ | ◯ | × |
| 1 | ◯ | ◯ | × | × | ||||
| 5.5 | ◯ | ◯ | × | × | ||||
| 5 | 2 | ◯ | ◯ | × | ◯ | |||
| 0.3 | ◯ | ◯ | × | × | ||||
| 7 | ◯ | ◯ | × | × | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, K.; Lee, C. String Stability Analysis and Design Guidelines for PD Controllers in Adaptive Cruise Control Systems. Sensors 2025, 25, 3518. https://doi.org/10.3390/s25113518
Lee K, Lee C. String Stability Analysis and Design Guidelines for PD Controllers in Adaptive Cruise Control Systems. Sensors. 2025; 25(11):3518. https://doi.org/10.3390/s25113518
Chicago/Turabian StyleLee, Kangjun, and Chanhwa Lee. 2025. "String Stability Analysis and Design Guidelines for PD Controllers in Adaptive Cruise Control Systems" Sensors 25, no. 11: 3518. https://doi.org/10.3390/s25113518
APA StyleLee, K., & Lee, C. (2025). String Stability Analysis and Design Guidelines for PD Controllers in Adaptive Cruise Control Systems. Sensors, 25(11), 3518. https://doi.org/10.3390/s25113518