
Linear Pseudo-Measurements Filtering for Tracking a Moving Underwater Target by Observations with Random Delays


Abstract
1. Introduction
2. Linear Pseudo-Measurement Filtering (For AUVs and Not Only)
2.1. Existing Models
2.2. Pseudo-Measurements for Unknown Errors Distribution
2.3. Pseudo-Measurements with Random Time Delay
2.4. Model with Multiple Observers
3. Tracking the Approach of an AUV on Two Sets of Measurements
3.1. AUV Motion Model
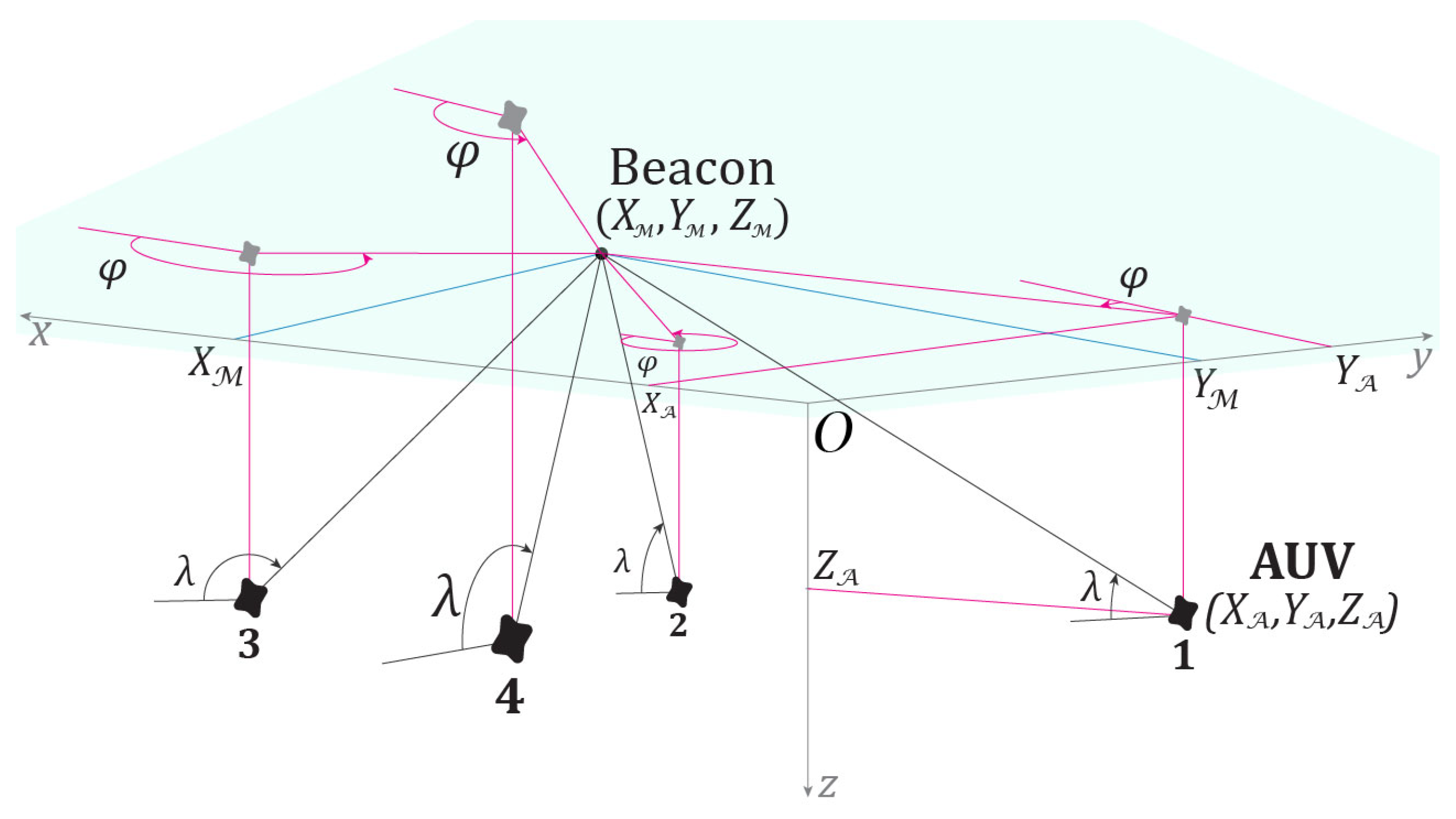
3.2. Model of Stationary Observers
- Bearings:
- Elevation angles:
- Ranges:
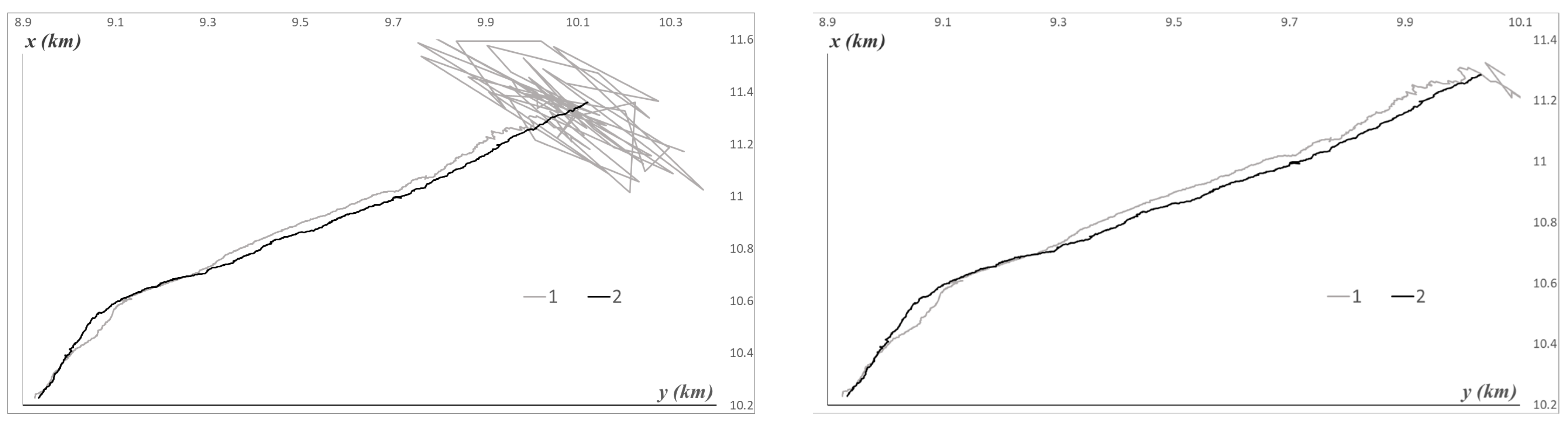
3.3. Numerical Experiments
4. Conclusions
4.1. Summary
4.2. Discussion
- rejection of the assumption of a known constant average velocity parameter and its replacement in the filter by the mathematical expectation (in which case the motion model becomes nonlinear);
- omission of the “preliminary” observation stage with the computation of a simple geometric estimate (as is typical in the pseudo-measurements filter, the initial estimates are set to the expected value of the initial position);
- movement of the trajectory closer to the coordinate planes, i.e., deterioration of the conditions for angular approximation (due to increased disturbance intensity or extended observation time).
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Burns, L.D.; Shulgan, C. Autonomy: The Quest to Build the Driverless Car—And How It Will Reshape Our World; HarperCollins: New York, NY, USA, 2018; p. 368. [Google Scholar]
- Ehlers, F. (Ed.) Autonomous Underwater Vehicles: Design and Practice (Radar, Sonar & Navigation); SciTech Publishing: London, UK, 2020. [Google Scholar]
- Christ, R.D.; Wernli, R.L. The ROV Manual: A User Guide for Remotely Operated Vehicles, 2nd ed.; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Zhu, Z.; Hu, S.-L.J.; Li, H. Effect on Kalman based underwater tracking due to ocean current uncertainty. In Proceedings of the 2016 IEEE/OES Autonomous Underwater Vehicles (AUV), Tokyo, Japan, 6–9 November 2016; pp. 131–137. [Google Scholar]
- Kebkal, K.G.; Mashoshin, A.I. AUV acoustic positioning methods. Gyroscopy Navig. 2017, 8, 80–89. [Google Scholar] [CrossRef]
- Bosov, A.V. Observation-Based Filtering of State of a Nonlinear Dynamical System with Random Delays. Autom. Remote Control 2023, 84, 594–605. [Google Scholar] [CrossRef]
- Bosov, A. Tracking a Maneuvering Object by Indirect Observations with Random Delays. Drones 2023, 7, 468. [Google Scholar] [CrossRef]
- Bosov, A.V. AUV Positioning and Motion Parameter Identification Based on Observations with Random Delays. Autom. Remote Control 2024, 85, 1024–1040. [Google Scholar] [CrossRef]
- Bosov, A. Maneuvering Object Tracking and Movement Parameters Identification by Indirect Observations with Random Delays. Axioms 2024, 13, 668. [Google Scholar] [CrossRef]
- Bosov, A.V. Nonlinear dynamic system state optimal filtering by observations with random delays. Inform. Appl. 2023, 17, 8–17. [Google Scholar] [CrossRef]
- Bernstein, I.; Friedland, B. Estimation of the State of a Nonlinear Process in the Presence of Nongaussian Noise and Disturbances. J. Franklin Inst. 1966, 281, 455–480. [Google Scholar]
- Arulampalam, S.; Maskell, S.; Gordon, N.J.; Clapp, T. A Tutorial on Particle Filters for On-line Non-linear/Non-Gaussian Bayesian Tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A New Approach for Filtering Nonlinear Systems. In Proceedings of the IEEE American Control Conference—ACC’95, Seattle, WA, USA, 21–23 June 1995; pp. 1628–1632. [Google Scholar]
- Pugachev, V.S. Estimation of variables and parameters in discrete-time nonlinear systems. Autom. Remote Control 1979, 40, 39–50. [Google Scholar]
- Pankov, A.R.; Bosov, A.V. Conditionally minimax algorithm for nonlinear system state estimation. IEEE Trans. Autom. Control 1994, 39, 1617–1620. [Google Scholar] [CrossRef]
- Wishner, R.P.; Tabaczynski, J.A.; Athans, M. A comparison of three non-linear filters. Automatica 1969, 5, 487–496. [Google Scholar] [CrossRef]
- Bell, B.M.; Cathey, F.W. The iterated Kalman filter update as a Gauss-Newton method. IEEE Trans. Autom. Control 1993, 38, 294–297. [Google Scholar] [CrossRef]
- Hu, X.; Bao, M.; Zhang, X.-P.; Guan, L.; Hu, Y.-H. Generalized Iterated Kalman Filter and its Performance Evaluation. IEEE Trans. Signal Process. 2015, 63, 3204–3217. [Google Scholar] [CrossRef]
- Su, X.; Ullah, I.; Liu, X.; Choi, D. A Review of Underwater Localization Techniques, Algorithms, and Challenges. J. Sens. 2020, 425, 2020. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng.—Trans. ASME 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Perea, L.; How, J.; Breger, L.; Elosegui, P. Nonlinearity in Sensor Fusion: Divergence Issues in EKF, Modified Truncated GSF, and UKF. In Proceedings of the AIAA Guidance, Navigation and Control Conference and Exhibit, Hilton Head, SC, USA, 20–23 August 2007. [Google Scholar] [CrossRef]
- Huang, G.P.; Mourikis, A.I.; Roumeliotis, S.I. Analysis and improvement of the consistency of extended Kalman filter based SLAM. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 473–479. [Google Scholar]
- Ljung, L. Asymptotic behavior of the extended Kalman filter as a parameter estimator for linear systems. IEEE Trans. Autom. Control 1979, 24, 36–50. [Google Scholar] [CrossRef]
- Hashemi, R.; Engell, S. Effect of Sampling Rate on the Divergence of the Extended Kalman Filter for a Continuous Polymerization Reactor in Comparison with Particle Filtering. IFAC-PapersOnLine 2016, 49, 365–370. [Google Scholar] [CrossRef]
- Borisov, A.V.; Bosov, A.V.; Miller, G.B. Conditionally-Minimax Nonlinear Filtering for Continuous-Discrete Stochastic Observation Systems: Comparative Study in Target Tracking. In Proceedings of the 2019 IEEE 58th Conference on Decision and Control (CDC), Nice, France, 11–13 December 2019. [Google Scholar] [CrossRef]
- Lingren, A.; Gong, K. Position and Velocity Estimation Via Bearing Observations. IEEE Trans. Aerosp. Electron. Syst. 1978, AES-14, 564–577. [Google Scholar]
- Kolb, R.C.; Hollister, F.H. Bearing-only target estimation. In Proceedings of the First Asilomar Conference on Circuits and Systems; Western Periodicals: Phoenix, AZ, USA, 1967; pp. 935–946. [Google Scholar]
- Aidala, V.J.; Nardone, S.C. Biased estimation properties of the pseudolinear tracking filter. IEEE Trans. Aerosp. Electron. Syst. 1982, AES-18, 432–441. [Google Scholar] [CrossRef]
- Holtsberg, A.; Holst, J.H. A nearly unbiased inherently stable bearings-only tracker. IEEE J. Ocean. Eng. 1993, 18, 138–141. [Google Scholar] [CrossRef]
- Nguyen, N.H.; Dogancay, K. Improved Pseudolinear Kalman Filter Algorithms for Bearings-Only Target Tracking. IEEE Trans. Signal Process. 2017, 65, 6119–6134. [Google Scholar] [CrossRef]
- Bu, S.; Meng, A.; Zhou, G. A New Pseudolinear Filter for Bearings-Only Tracking without Requirement of Bias Compensation. Sensors 2021, 21, 5444. [Google Scholar] [CrossRef] [PubMed]
- Lin, X.; Kirubarajan, T.; Bar-Shalom, Y.; Maskell, S. Comparison of EKF, pseudomeasurement, and particle filters for a bearing-only target tracking problem. In Signal and Data Processing of Small Targets 2002, Proceedings of the AEROSENSE 2002, Orlando, FL, USA, 1–5 April 2002; Drummond, O.E., Ed.; International Society for Optics and Photonics; SPIE: Bellingham, WA, USA, 2002; Volume 4728, pp. 240–250. [Google Scholar]
- Amelin, K.S.; Miller, A.B. Algorithm of the UAVs location verifying using Kalman filtering of DF measurements. Inform. Process. 2013, 13, 338–352. [Google Scholar]
- Miller, A.B.; Miller, B.M. Tracking of the UAV trajectory on the basis of bearing-only observations. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; p. 4178. [Google Scholar] [CrossRef]
- Miller, A.B.; Miller, B.M. Stochastic control of light UAV at landing with the aid of bearing-only observations. In Proceedings of the Eighth International Conference on Machine Vision, Barcelona, Spain, 19–21 November 2015; p. 9875. [Google Scholar] [CrossRef]
- Miller, A.B.; Miller, B.M. Underwater Target Tracking Using Bearing-Only Measurements. J. Commun. Technol. Electron. 2018, 63, 643. [Google Scholar] [CrossRef]
- Miller, A.; Miller, B.; Miller, G. On AUV Control with the Aid of Position Estimation Algorithms Based on Acoustic Seabed Sensing and DOA Measurements. Sensors 2019, 19, 5520. [Google Scholar] [CrossRef]
- Karpenko, S.; Konovalenko, I.; Miller, A.; Miller, B.; Nikolaev, D. UAV Control on the Basis of 3D Landmark Bearing-Only Observations. Sensors 2015, 15, 29802–29820. [Google Scholar] [CrossRef]
- Konovalenko, I.; Kuznetsova, E.; Miller, A.; Miller, B.; Popov, A.; Shepelev, D.; Stepanyan, K. New Approaches to the Integration of Navigation Systems for Autonomous Unmanned Vehicles (UAV). Sensors 2018, 18, 3010. [Google Scholar] [CrossRef]
- Hodges, R. Underwater Acoustics: Analysis, Design and Performance of Sonar; Wiley: New York, NY, USA, 2011. [Google Scholar]
- Holler, R.A. The evolution of the sonobuoy from World War II to the Cold War. US Navy J. Underw. Acoust. 2014, 25, 322–346. [Google Scholar]
- Miller, A.; Miller, B. Pseudomeasurement Kalman filter in underwater target motion analysis & Integration of bearing-only and active-range measurement. IFAC-PapersOnLine 2017, 50, 3817. [Google Scholar] [CrossRef]
- Liptser, R.S.; Shiryaev, A.N. Statistics of Random Processes II: Applications; Stochastic Modelling and Applied Probability; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Morris, J. The Kalman filter: A robust estimator for some classes of linear quadratic problems. IEEE Trans. Inf. Theory 1976, 22, 526–534. [Google Scholar] [CrossRef]
- Wong, G.S.K.; Zhu, S.-m. Speed of sound in seawater as a function of salinity, temperature, and pressure. J. Acoust. Soc. Am. 1995, 97, 1732–1736. [Google Scholar] [CrossRef]
- Dushaw, B.D.; Worcester, P.F.; Cornuelle, B.D.; Howe, B.M. On Equations for the Speed of Sound in Seawater. J. Acoust. Soc. Am. 1993, 93, 255–275. [Google Scholar] [CrossRef]
- Serway, R.A.; Jewett, J.W. Physics for Scientists and Engineers, 6th ed.; Brooks/Cole: Boston, MA, USA, 2004; ISBN 978-0-534-40842-8. [Google Scholar]
- Bosov, A.V. Doppler measurements application analysis to identify motion parameters from observations with random delays. Inform. Appl. 2025, 19, 34–44. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | ||||||
|---|---|---|---|---|---|---|
| 24.81 | 23.34 | 26.22 | 193.79 | 199.29 | 267.02 | |
| 23.79 | 22.33 | 24.76 | ||||
| 39.50 | 38.04 | 45.47 | 194.72 | 200.20 | 268.05 | |
| 49.06 | 46.63 | 45.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bosov, A. Linear Pseudo-Measurements Filtering for Tracking a Moving Underwater Target by Observations with Random Delays. Sensors 2025, 25, 3757. https://doi.org/10.3390/s25123757
Bosov A. Linear Pseudo-Measurements Filtering for Tracking a Moving Underwater Target by Observations with Random Delays. Sensors. 2025; 25(12):3757. https://doi.org/10.3390/s25123757
Chicago/Turabian StyleBosov, Alexey. 2025. "Linear Pseudo-Measurements Filtering for Tracking a Moving Underwater Target by Observations with Random Delays" Sensors 25, no. 12: 3757. https://doi.org/10.3390/s25123757
APA StyleBosov, A. (2025). Linear Pseudo-Measurements Filtering for Tracking a Moving Underwater Target by Observations with Random Delays. Sensors, 25(12), 3757. https://doi.org/10.3390/s25123757