
DTTF-Sim: A Digital Twin-Based Simulation System for Continuous Autonomous Driving Testing


Abstract
1. Introduction
- DTTF-Sim can faithfully reproduce traffic data in the simulation environment, providing accurate vehicle dynamics information. This ensures a realistic and reliable testing environment for autonomous driving systems.
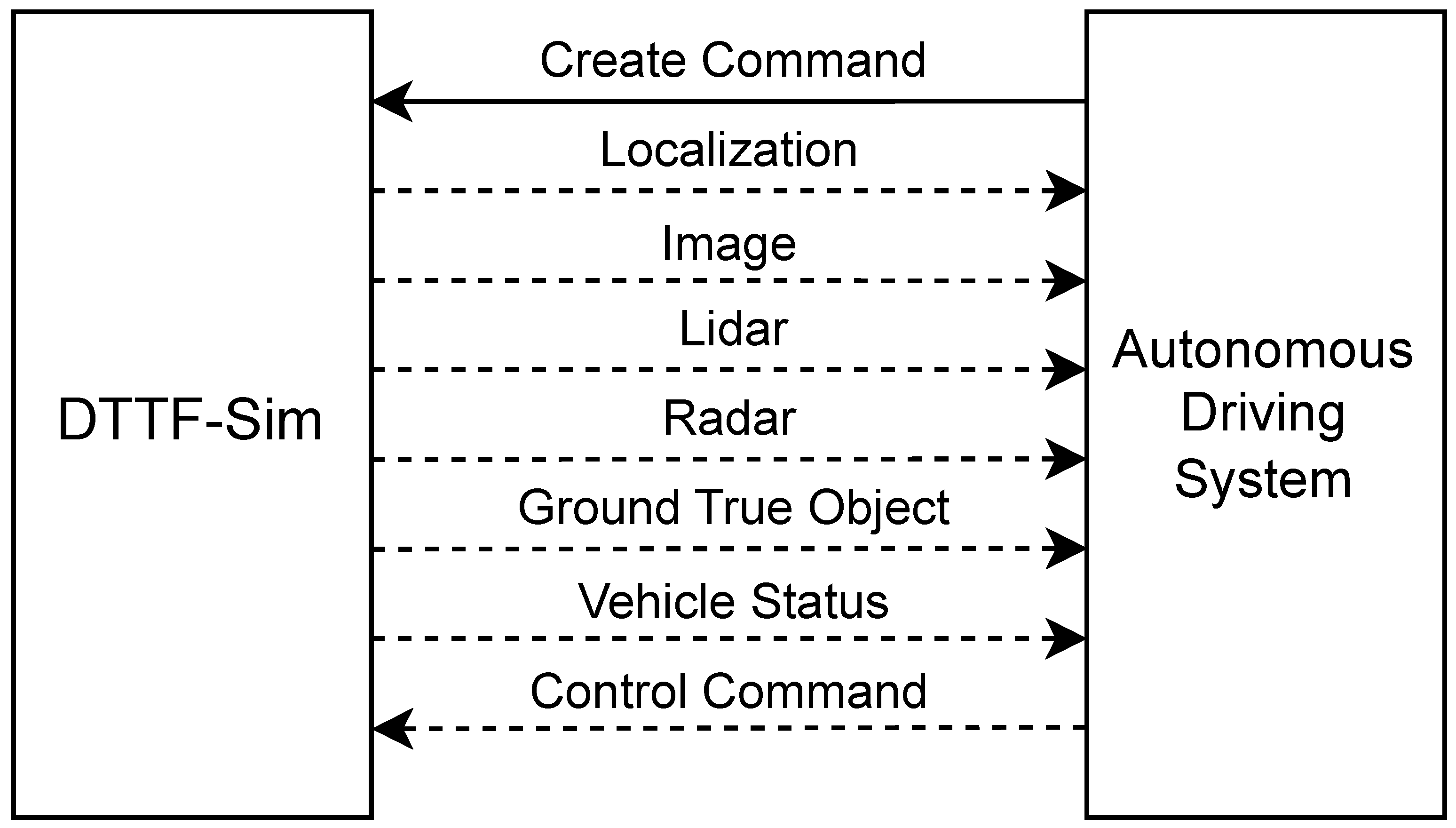
- DTTF-Sim supports participation in the entire process by autonomous driving systems, from sensor data input to control command output. It allows these systems to engage in complex interaction and strategic decision-making within the simulated traffic flow, thereby evaluating their decision-making and response capabilities in dynamic scenarios.
- DTTF-Sim provides a long-term continuous simulation environment, enabling comprehensive assessment of system stability and reliability over extended periods. Unlike other simulators that may be limited to short or fragmented test scenarios, DTTF-Sim supports sustained testing under various complex traffic conditions.
2. Related Work
2.1. Flow-Based Simulators
2.2. Scenario-Based Simulators
2.3. Vehicle Based Simulator
2.4. Data-Driven Simulators
3. Problem Description
- the should ensure the similarity between virtual and real traffic flow in several aspects, including road network, vehicle incoming, speed distribution, gap distribution, time headway distribution, lane density, lane-changing similarity, lane-center deviation and so on;
- the should accurately replicate the kinematic features of both background vehicles and autonomous vehicles, ensuring that the vehicles in the simulation exhibit dynamic behaviors that align with those in the real world, such as a complete lane-changing process;
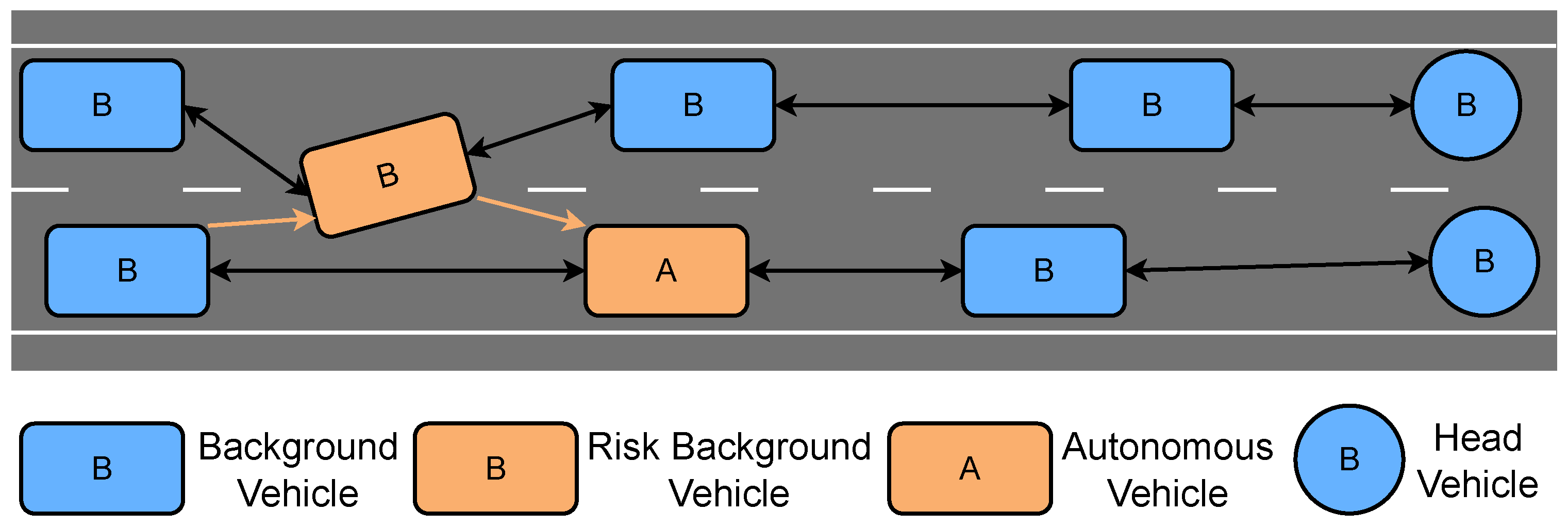
- the should incorporate autonomous interaction capabilities between background vehicles and autonomous vehicles, as well as among background vehicles themselves, covering behaviors such as car-following, lane changing, and collision avoidance, thereby ensuring the overall consistency and dynamic evolution of traffic flow in the simulation environment.
4. Framework Overview
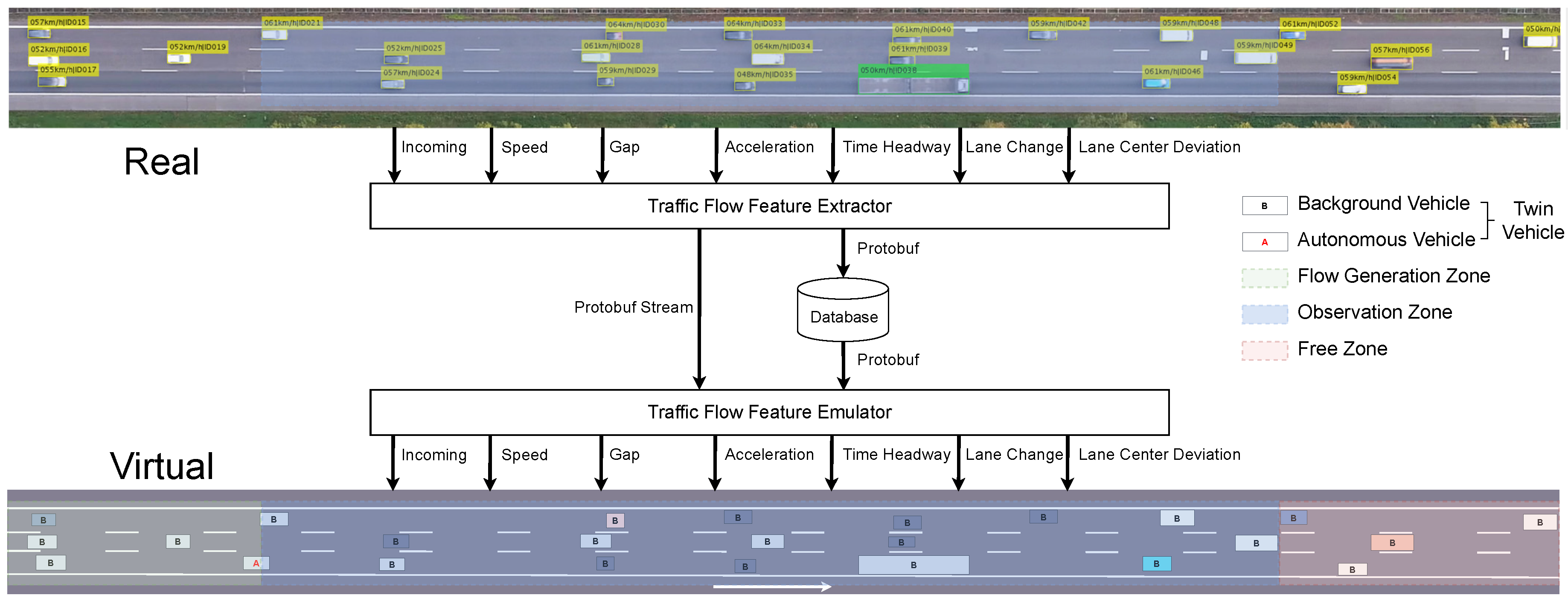
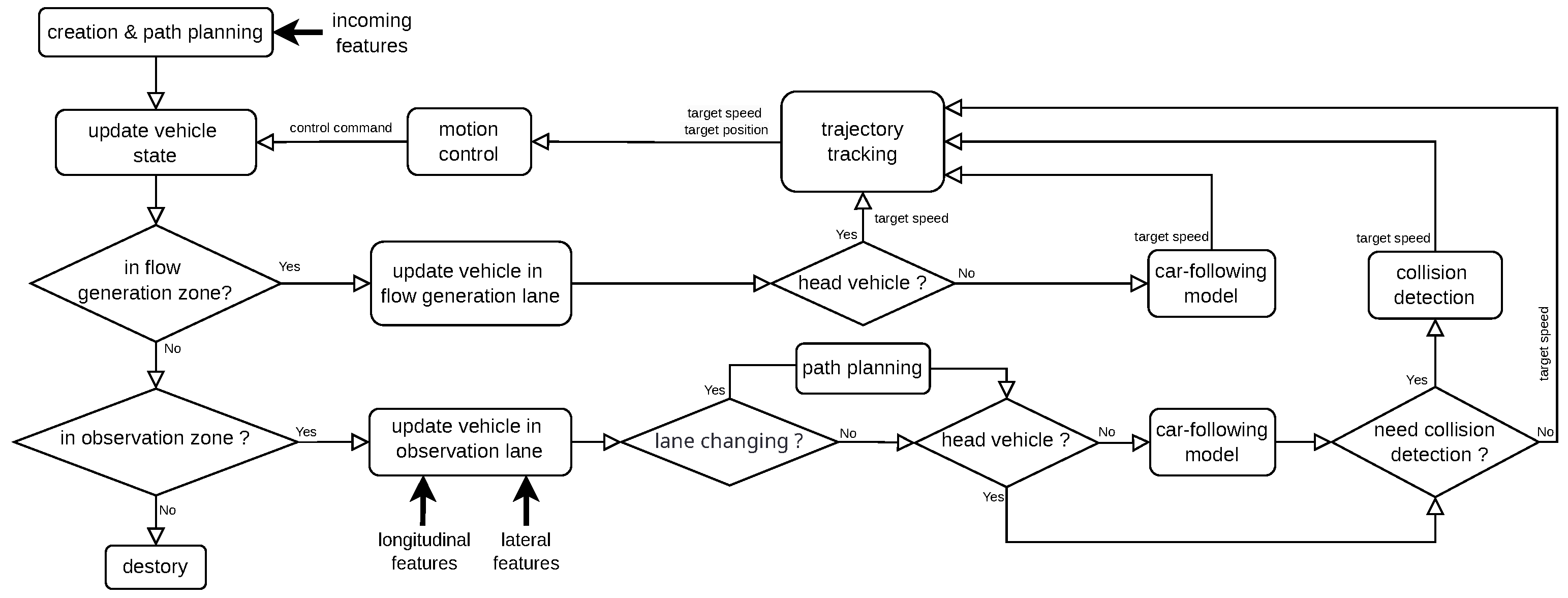
- Flow Generation Zone: This is the entry region of the simulation where new background vehicles are dynamically created based on the extracted incoming traffic features, such as entry speed, size, and lateral offset. The emulator initializes vehicle states and assigns their paths according to lane-specific traffic flow parameters, ensuring alignment with real-world inflow conditions.
- Observation Zone: Positioned at the center of the simulation environment, this zone serves as the primary area for evaluating traffic interactions. Within this region, background vehicles execute car-following, lane-changing, and collision avoidance behaviors under the guidance of the feature emulator. The observation zone is designed to preserve fidelity to real-world traffic distributions and is typically the target area for testing autonomous vehicle performance and interaction.
- Free Zone: This terminal region marks the exit of vehicles from the simulation. Once vehicles cross into the free zone, they are safely destroyed by the emulator to release computational resources. This mechanism ensures efficient simulation management while preserving behavioral continuity up to the point of vehicle removal.
5. System Design
5.1. Traffic Flow Feature Extractor Module
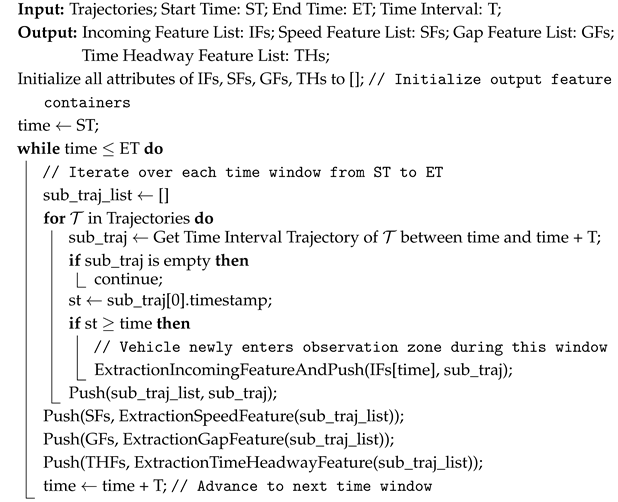
- Incoming features: describe the entry of vehicles into the observation zone during a fixed time interval T. Formally, for each interval , the extractor identifies all vehicles i with entry times and records their initial speed , geometric size , and lateral deviation from the lane centerline. These features determine the inflow characteristics of vehicles into the simulation environment.
- Longitudinal features: characterize lane-wise car-following behavior and include speed, gap, time headway, and acceleration. For all vehicles i in a given lane L during interval T, the extractor computes statistical moments (mean, standard deviation, max, min) of: speed , gap , time headway , acceleration . These features are used to directly parameterize a modified Krauss car-following model.
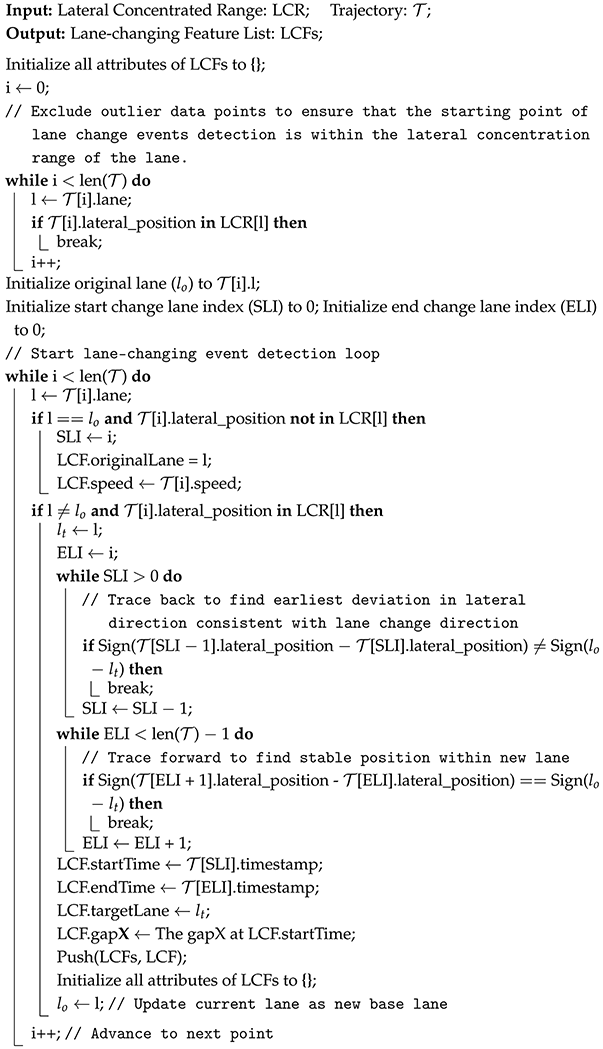
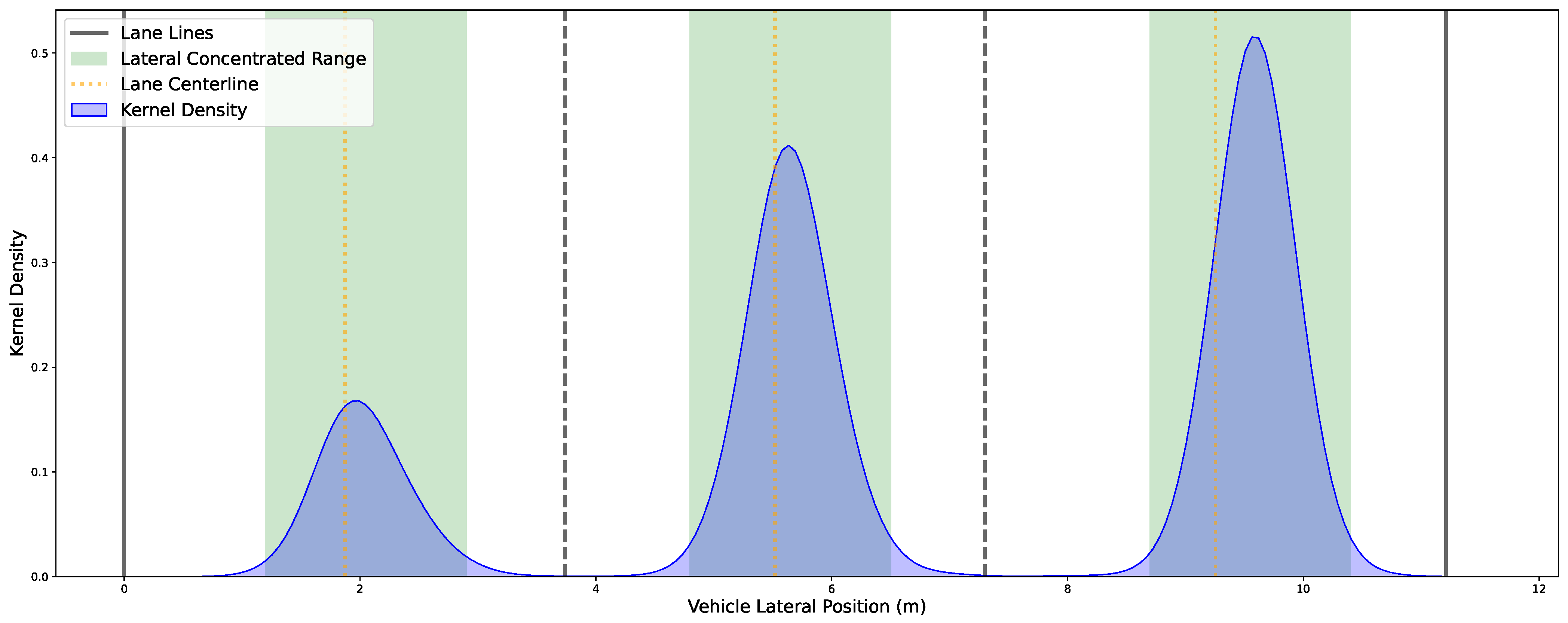
- Lateral Features: capture lane positioning and lane-changing behaviors. Lane-center deviation is defined as the vehicle’s lateral offset relative to the centerline of its current lane, as is shown in Figure 2. The extractor constructs a lateral kernel density map to determine the stable driving region for each lane, denoted . A lane-changing event is detected when a vehicle exits its current lane’s concentrated range and enters the target lane’s range. A complete lane-change trajectory is annotated with the following attributes: start and end times of the lane-change ; original and target lanes ; vehicle speed at the lane-change start ; and gaps to surrounding vehicles. These lateral features provide the foundation for modeling realistic lane-changing decisions and interactions among vehicles in adjacent lanes.
| Algorithm 1: Traffic Flow Longitudinal Feature Extraction Algorithm |
 |
| Algorithm 2: Traffic Flow Lane-Changing Feature Extraction Algorithm |
 |
5.2. Traffic Flow Feature Emulator Module
5.2.1. Creation
5.2.2. Path Planning
5.2.3. Trajectory Tracking
5.2.4. Car-Following Behavior
5.2.5. Lane-Changing
- startTime and endTime: The duration of the lane change event, from the start of the lane change to its completion.
- targetLane: The target lane direction, indicating which lane the vehicle will change to.
- speed and gapX: The aggressiveness of the lane change. speed represents the speed during the lane change, while gapX indicates the distance to the around vehicle. These two parameters together determine the urgency and safety of the lane change.
5.2.6. Collision Detection
5.2.7. Motion Control
5.2.8. Destruction
5.3. Twin-Vehicle Module
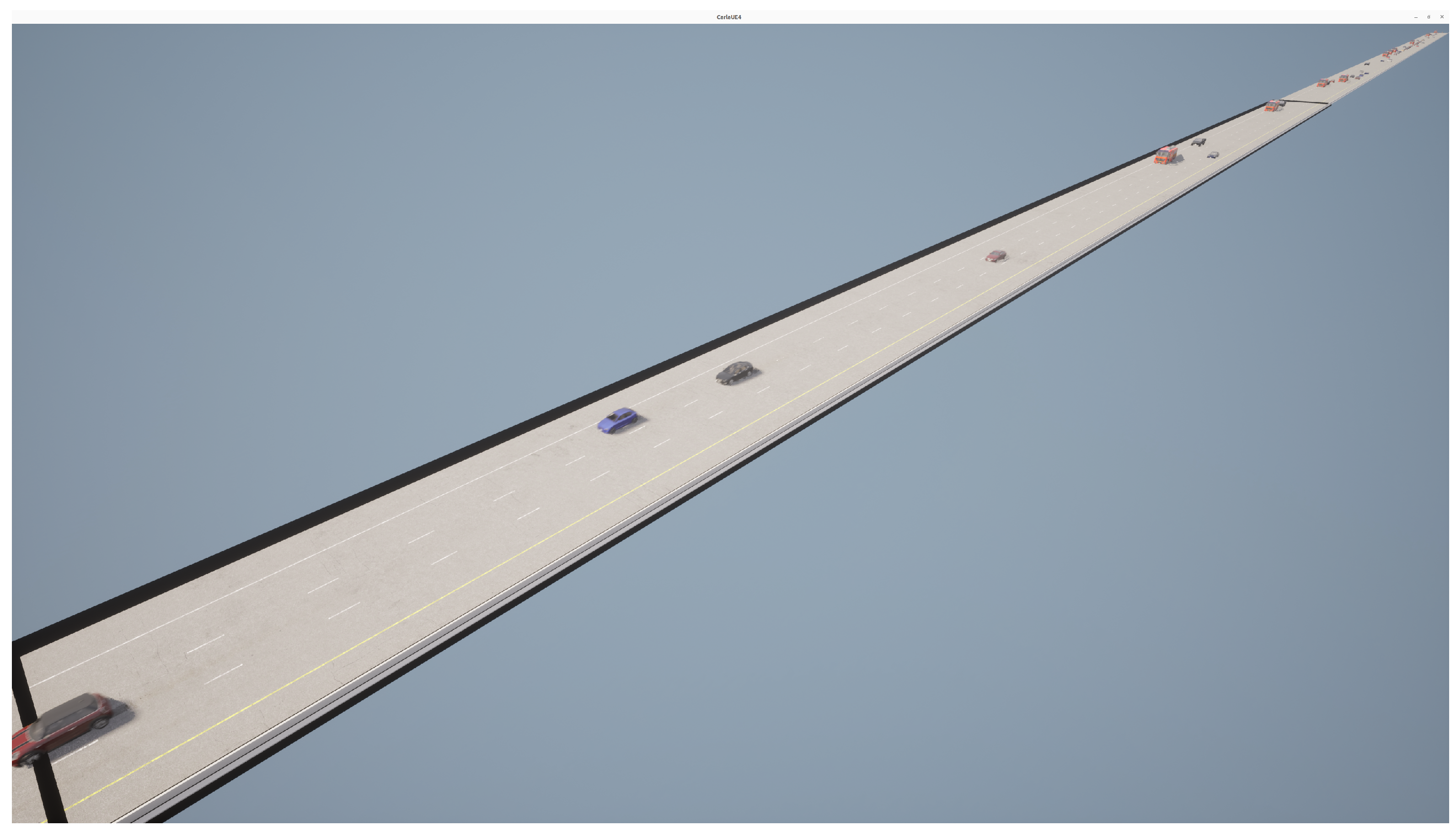
6. Implementation and Evaluations
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- speed [double]: The speed of the vehicle as it enters the observation zone.
- size [double, double]: The size of the vehicle, including length and width.
- offset [double]: The average offset of the vehicle from the lane center line within the observation zone.
- max [double]: The maximum speed of vehicles traveling on lane L within the time interval T.
- min [double]: The minimum speed of vehicles traveling on lane L within the time interval T.
- mean [double]: The mean speed of vehicles traveling on lane L within the time interval T.
- std [double]: The standard deviation of vehicle speeds on lane L within the time interval T.
- max [double]: The maximum gap of vehicles traveling on lane L within the time interval T.
- min [double]: The minimum gap of vehicles traveling on lane L within the time interval T.
- mean [double]: The mean gap of vehicles traveling on lane L within the time interval T.
- std [double]: The standard deviation of gap on lane L within the time interval T.
- max [double]: The maximum time headway of vehicles traveling on lane L within the time interval T.
- min [double]: The minimum time headway of vehicles traveling on lane L within the time interval T.
- mean [double]: The mean time headway of vehicles traveling on lane L within the time interval T.
- std [double]: The standard deviation of time headway on lane L within the time interval T.
- max [double]: The maximum accelerattion of vehicles traveling on lane L within the time interval T.
- min [double]: The minimum accelerattion of vehicles traveling on lane L within the time interval T.
- mean [double]: The mean accelerattion of vehicles traveling on lane L within the time interval T.
- std [double]: The standard deviation of accelerattion on lane L within the time interval T.
- startTime [int]: The start time of the lane change event.
- endTime [int]: The end time of the lane change event.
- originalLane [int]: The original lane time of the lane change event.
- targetLane [int]: The target lane time of the lane change event.
- speed [double]: The speed when vehicle start lane-changing.
- gapOFollowing [double]: The gap between the lane-changing vehicle and the following vehicle in the original lane.
- gapOPreceding [double]: The gap between the lane-changing vehicle and the preceding vehicle in the original lane.
- gapTFollowing [double]: The gap between the lane-changing vehicle and the following vehicle in the target lane.
- gapTPreceding [double]: The gap between the lane-changing vehicle and the preceding vehicle in the target lane.
- left [double]: The left boundary of the Lateral Concentrated Range.
- right [double]: The right boundary of the Lateral Concentrated Range
References
- Kalra, N.; Paddock, S.M. Driving to Safety: How Many Miles of Driving Would It Take to Demonstrate Autonomous Vehicle Reliability? Transp. Res. Part A Policy Pract. 2016, 94, 182–193. [Google Scholar] [CrossRef]
- Alvarez Lopez, P.; Banse, A.; Barthauer, M.; Behrisch, M.; Couéraud, B.; Erdmann, J.; Flötteröd, Y.-P.; Hilbrich, R.; Nippold, R.; Wagner, P. Simulation of Urban Mobility (SUMO); Zenodo: Geneva, Switzerland, 2024. [Google Scholar] [CrossRef]
- Fellendorf, M.; Vortisch, P. Microscopic Traffic Flow Simulator VISSIM. In Fundamentals of Traffic Simulation; Barceló, J., Ed.; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2010; Volume 145, pp. 63–93. [Google Scholar]
- Casas, J.; Ferrer, J.L.; Garcia, D.; Perarnau, J.; Torday, A. Traffic Simulation with Aimsun. In Fundamentals of Traffic Simulation; Barceló, J., Ed.; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2010; Volume 145, pp. 173–232. [Google Scholar] [CrossRef]
- Cameron, G.D.B.; Duncan, G.I.D. PARAMICS—Parallel Microscopic Simulation of Road Traffic. J. Supercomput. 1996, 10, 25–53. [Google Scholar] [CrossRef]
- von Neumann-Cosel, K.; Dupuis, M.; Weiss, C. Virtual Test Drive—Provision of a Consistent Tool-Set for [D,H,S,V]-in-the-Loop. In Proceedings of the DSC 2009 Europe, Monte Carlo, Monaco, 4–6 February 2009. [Google Scholar]
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. In Proceedings of the 1st Annual Conference on Robot Learning, Mountain View, CA, USA, 13–15 November 2017; pp. 1–16. [Google Scholar]
- Chen, H.; Ren, H.; Li, R.; Yang, G.; Ma, S. Generating Autonomous Driving Test Scenarios Based on OpenSCENARIO. In Proceedings of the 2022 9th International Conference on Dependable Systems and Their Applications (DSA), Wulumuqi, China, 4–5 August 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 650–658. [Google Scholar] [CrossRef]
- Bergamini, L.; Ye, Y.; Scheel, O.; Chen, L.; Hu, C.; Del Pero, L.; Osinski, B.; Grimmett, H.; Ondruska, P. SimNet: Learning Reactive Self-Driving Simulations from Real-World Observations. arXiv 2021. [Google Scholar] [CrossRef]
- Feng, L.; Li, Q.; Peng, Z.; Tan, S.; Zhou, B. TrafficGen: Learning to Generate Diverse and Realistic Traffic Scenarios. arXiv 2022. [Google Scholar] [CrossRef]
- Nuli, S.; Mathew, T.V. Online Coordination of Signals for Heterogeneous Traffic Using Stop Line Detection. Procedia—Soc. Behav. Sci. 2013, 104, 765–774. [Google Scholar] [CrossRef]
- Wang, J.; Chai, R.; Wu, Q. Changing Lane Probability Estimating Model Based on Neural Network. In Proceedings of the 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, 31 May–2 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 3915–3920. [Google Scholar] [CrossRef]
- Chen, C.; Cao, Y.; Tang, K.; Li, K. Dynamic Path Flow Estimation Using Automatic Vehicle Identification and Probe Vehicle Trajectory Data: A 3D Convolutional Neural Network Model. J. Adv. Transp. 2021, 2021, 1–15. [Google Scholar] [CrossRef]
- Li, D.; Hou, Z. Perimeter Control of Urban Traffic Networks Based on Model-Free Adaptive Control. IEEE Trans. Intell. Transport. Syst. 2021, 22, 6460–6472. [Google Scholar] [CrossRef]
- Farah, H.; Postigo, I.; Reddy, N.; Dong, Y.; Rydergren, C.; Raju, N.; Olstam, J. Modeling Automated Driving in Microscopic Traffic Simulations for Traffic Performance Evaluations: Aspects to Consider and State of the Practice. IEEE Trans. Intell. Transport. Syst. 2023, 24, 6558–6574. [Google Scholar] [CrossRef]
- Abbaszadeh Shahri, A.; Pashamohammadi, F.; Asheghi, R.; Abbaszadeh Shahri, H. Automated Intelligent Hybrid Computing Schemes to Predict Blasting Induced Ground Vibration. Eng. Comput. 2022, 38, 3335–3349. [Google Scholar] [CrossRef]
- Gao, L.; Bai, W.; Leary, R.; Varadarajan, K.; Brennan, S. ROS Integration of External Vehicle Motion Simulations with an AIMSUN Traffic Simulator as a Tool to Assess CAV Impacts on Traffic. IFAC-PapersOnLine 2021, 54, 870–875. [Google Scholar] [CrossRef]
- Sykes, P. Traffic Simulation with Paramics. In Fundamentals of Traffic Simulation; Barceló, J., Ed.; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2010; Volume 145, pp. 131–171. [Google Scholar] [CrossRef]
- Cortés, C.E.; Stefoni, B. Trajectory Simulation of Emergency Vehicles and Interactions with Surrounding Traffic. J. Adv. Transp. 2023, 2023, 5995950. [Google Scholar] [CrossRef]
- Luo, G.; Shao, C.; Cheng, N.; Zhou, H.; Zhang, H.; Yuan, Q.; Li, J. EdgeCooper: Network-Aware Cooperative LiDAR Perception for Enhanced Vehicular Awareness. IEEE J. Select. Areas Commun. 2024, 42, 207–222. [Google Scholar] [CrossRef]
- Tang, X.; Zhong, G.; Li, S.; Yang, K.; Shu, K.; Cao, D.; Lin, X. Uncertainty-Aware Decision-Making for Autonomous Driving at Uncontrolled Intersections. IEEE Trans. Intell. Transport. Syst. 2023, 24, 9725–9735. [Google Scholar] [CrossRef]
- Hou, N.; Ding, N.; Zhang, H.; Ran, C.; Wu, H. Comparative Safety and Stability Assessment of Autonomous Vehicle Lane-Changing Strategies in Mixed Traffic at Urban Expressway Weaving Section. In Proceedings of the 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC), Bilbao, Spain, 24–28 September 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 6175–6180. [Google Scholar] [CrossRef]
- Xiao, T.; Chen, S.; Zhu, K.; Huang, R.; Li, A.; Zheng, N.; Xin, J. Injection Simulation: An Efficient Validation Framework for Autonomous Driving System. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 472–478. [Google Scholar] [CrossRef]
- Masi, S.; Xu, P.; Bonnifait, P. Roundabout Crossing With Interval Occupancy and Virtual Instances of Road Users. IEEE Trans. Intell. Transport. Syst. 2022, 23, 4212–4224. [Google Scholar] [CrossRef]
- Kirchengast, M.; Watzenig, D. A Depth-Buffer-Based Lidar Model With Surface Normal Estimation. IEEE Trans. Intell. Transport. Syst. 2024, 25, 9375–9386. [Google Scholar] [CrossRef]
- Muckenhuber, S.; Holzer, H.; Rubsam, J.; Stettinger, G. Object-Based Sensor Model for Virtual Testing of ADAS/AD Functions. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zhu, Y.; Wang, J.; Guo, X.; Meng, F.; Liu, T. Functional Testing Scenario Library Generation Framework for Connected and Automated Vehicles. IEEE Trans. Intell. Transport. Syst. 2023, 24, 9712–9724. [Google Scholar] [CrossRef]
- Kaljavesi, G.; Kerbl, T.; Betz, T.; Mitkovskii, K.; Diermeyer, F. CARLA-Autoware-Bridge: Facilitating Autonomous Driving Research with a Unified Framework for Simulation and Module Development. In Proceedings of the 2024 IEEE Intelligent Vehicles Symposium (IV), Jeju, Republic of Korea, 2–5 June 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 224–229. [Google Scholar] [CrossRef]
- Luan, W.; Ding, Q.; Wu, Y. Research on Integrated Environment of Autonomous Vehicle Simulation Based on Apollo. In Proceedings of the 2023 5th International Conference on Robotics, Intelligent Control and Artificial Intelligence (RICAI), Hangzhou, China, 1–3 December 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 397–401. [Google Scholar] [CrossRef]
- Zhou, Z.; Rother, C.; Chen, J. Event-Triggered Model Predictive Control for Autonomous Vehicle Path Tracking: Validation Using CARLA Simulator. IEEE Trans. Intell. Veh. 2023, 8, 3547–3555. [Google Scholar] [CrossRef]
- Li, D.; Okhrin, O. Modified DDPG Car-Following Model with a Real-World Human Driving Experience with CARLA Simulator. Transp. Res. Part C Emerg. Technol. 2023, 147, 103987. [Google Scholar] [CrossRef]
- Ramakrishna, S.; Luo, B.; Kuhn, C.B.; Karsai, G.; Dubey, A. ANTI-CARLA: An Adversarial Testing Framework for Autonomous Vehicles in CARLA. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 2620–2627. [Google Scholar] [CrossRef]
- Bu, T.; Zhang, X.; Mertz, C.; Dolan, J.M. CARLA Simulated Data for Rare Road Object Detection. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 2794–2801. [Google Scholar] [CrossRef]
- Wen, L.; Fu, D.; Mao, S.; Cai, P.; Dou, M.; Li, Y.; Qiao, Y. LimSim: A Long-Term Interactive Multi-Scenario Traffic Simulator. arXiv 2023. [Google Scholar] [CrossRef]
- Jansen, W.; Verreycken, E.; Schenck, A.; Blanquart, J.-E.; Verhulst, C.; Huebel, N.; Steckel, J. Cosys-AirSim: A Real-Time Simulation Framework Expanded for Complex Industrial Applications. arXiv 2023. [Google Scholar] [CrossRef]
- Duan, J.; Wang, Y.; Ding, J.; Deng, W. Digital Twin Test Method for Autonomous Vehicles Based on PanoSim; SAE International: Nanchang, China, 2023. [Google Scholar] [CrossRef]
- Ying, L.; Long, J.; Shang, M.; Wang, X.; Wang, F.-Y. ACP-Incorporated Perturbation-Resistant Neural Dynamics Controller for Autonomous Vehicles. IEEE Trans. Intell. Veh. 2024, 9, 4675–4686. [Google Scholar] [CrossRef]
- Liang, J.; Tian, Q.; Feng, J.; Pi, D.; Yin, G. A Polytopic Model-Based Robust Predictive Control Scheme for Path Tracking of Autonomous Vehicles. IEEE Trans. Intell. Veh. 2024, 9, 3928–3939. [Google Scholar] [CrossRef]
- Huang, Y.; Ding, H.; Zhang, Y.; Wang, H.; Cao, D.; Xu, N.; Hu, C. A Motion Planning and Tracking Framework for Autonomous Vehicles Based on Artificial Potential Field Elaborated Resistance Network Approach. IEEE Trans. Ind. Electron. 2020, 67, 1376–1386. [Google Scholar] [CrossRef]
- Quirynen, R.; Safaoui, S.; Di Cairano, S. Real-Time Mixed-Integer Quadratic Programming for Vehicle Decision-Making and Motion Planning. IEEE Trans. Contr. Syst. Technol. 2025, 33, 77–91. [Google Scholar] [CrossRef]
- Dutta, T.; Reddy, D.S.; Rajalakshmi, P. Real-Time Deep Learning Based Safe Autonomous Navigation. In Proceedings of the 2024 8th International Conference on Robotics, Control and Automation (ICRCA), Shanghai, China, 12–14 January 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 400–406. [Google Scholar] [CrossRef]
- Caesar, H.; Kabzan, J.; Tan, K.S.; Fong, W.K.; Wolff, E.; Lang, A.; Fletcher, L.; Beijbom, O.; Omari, S. NuPlan: A Closed-Loop ML-Based Planning Benchmark for Autonomous Vehicles. arXiv 2022. [Google Scholar] [CrossRef]
- Montali, N.; Lambert, J.; Mougin, P.; Kuefler, A.; Rhinehart, N.; Li, M.; Gulino, C.; Emrich, T.; Yang, Z.; Whiteson, S.; et al. The Waymo Open Sim Agents Challenge. arXiv 2023. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.; Luo, Y. Five-Dimension Digital Twin Model and Its Ten Applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. [Google Scholar]
- Krauss, S. Microscopic Modeling of Traffic Flow: Investigation of Collision Free Vehicle Dynamics. Ph.D. Thesis, University of Cologne, Cologne, Germany, 1998. [Google Scholar]
- Krauss, S.; Wagner, P.; Gawron, C. Metastable States in a Microscopic Model of Traffic Flow. Phys. Rev. E 1997, 55, 5597–5602. [Google Scholar] [CrossRef]
- Gipps, P.G. A Model for the Structure of Lane-Changing Decisions. Transp. Res. Part B Methodol. 1986, 20, 403–414. [Google Scholar] [CrossRef]
- Krajewski, R.; Bock, J.; Kloeker, L.; Eckstein, L. The highD Dataset: A Drone Dataset of Naturalistic Vehicle Trajectories on German Highways for Validation of Highly Automated Driving Systems. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 2118–2125. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulator Type | Advantages | Limitations | Typical Simulators |
|---|---|---|---|
| Flow-based | Support large-scale traffic modeling and traffic management evaluation; Good scalability and efficiency. | Simplified vehicle models as point-mass; Cannot simulate realistic vehicle dynamics and interaction. | SUMO, VISSIM, Aimsun, Paramics |
| Scenario-based | Support dynamic scene rendering and vehicle kinematics; Suitable for perception, planning, and control testing. | Depend on predefined scripts and behavior trees; Limited diversity and spontaneity in interaction. | CARLA, VTD, LGSVL, NVIDIA Drive |
| Vehicle Dynamics | Accurate modeling of vehicle control systems and dynamics; Ideal for component- level validation. | Lack multi-vehicle interaction modeling and real-world traffic scenes; Not suitable for system- level evaluation. | CarSim, Simulink, dSPACE, CarMaker |
| Data-driven | Leverage real-world data to learn complex driving behaviors and generate diverse scenarios. Capable of producing traffic scenarios with high realism. | Vehicles modeled as point masses, lacking kinematic fidelity; Weak support for sensor-level simulation; limited to planning- level evaluation. | SimNet, TrafficGen, nuPlan, Waymo |
| DTTF-Sim | Supports long-term simulation with digital twin mapping; Preserves vehicle dynamics; enables closed-loop integration with ADS. | Currently lacks complex road network support (e.g., ramps, intersections); Behavior models are rule-based. | - |
| Simulator | Long Term | Vehicle Dynamic | Diverse Interaction | End-to-End | Real |
|---|---|---|---|---|---|
| Flow-based | + | - | ∘ | - | ∘ |
| Scenario-based | ∘ | + | ∘ | ∘ | ∘ |
| Vehicle-based | ∘ | + | - | - | ∘ |
| Data-based | ∘ | ∘ | + | - | + |
| DTTF-Sim | + | + | ∘ | + | + |
| Parameter | Value |
|---|---|
| CPU | i7-12700KF |
| GPU | NVIDIA RTX 3080 Ti |
| Time Interval | 1 s |
| Total Time | 20-min |
| Vehicle Count | 1211 |
| Lane-changing Count | 99 |
| Lane Number | 3 |
| The Length of Flow Generation Zone | 1000 m |
| The Length of Observation Zone | 400 m |
| Lane | 0 | 1 | 2 |
|---|---|---|---|
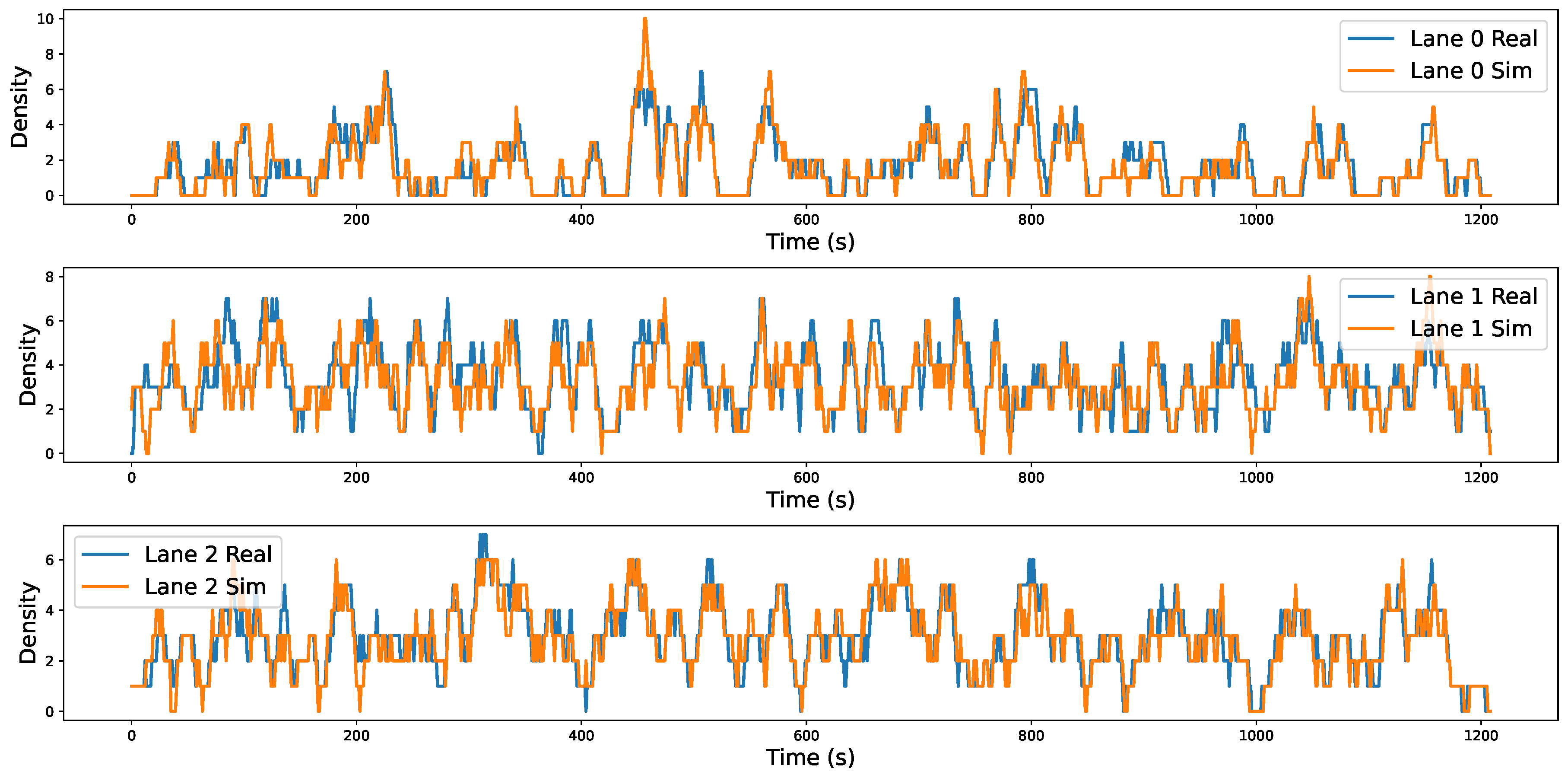
| MAE | 0.531 | 0.758 | 0.509 |
| Lane | 0 | 1 | 2 |
|---|---|---|---|
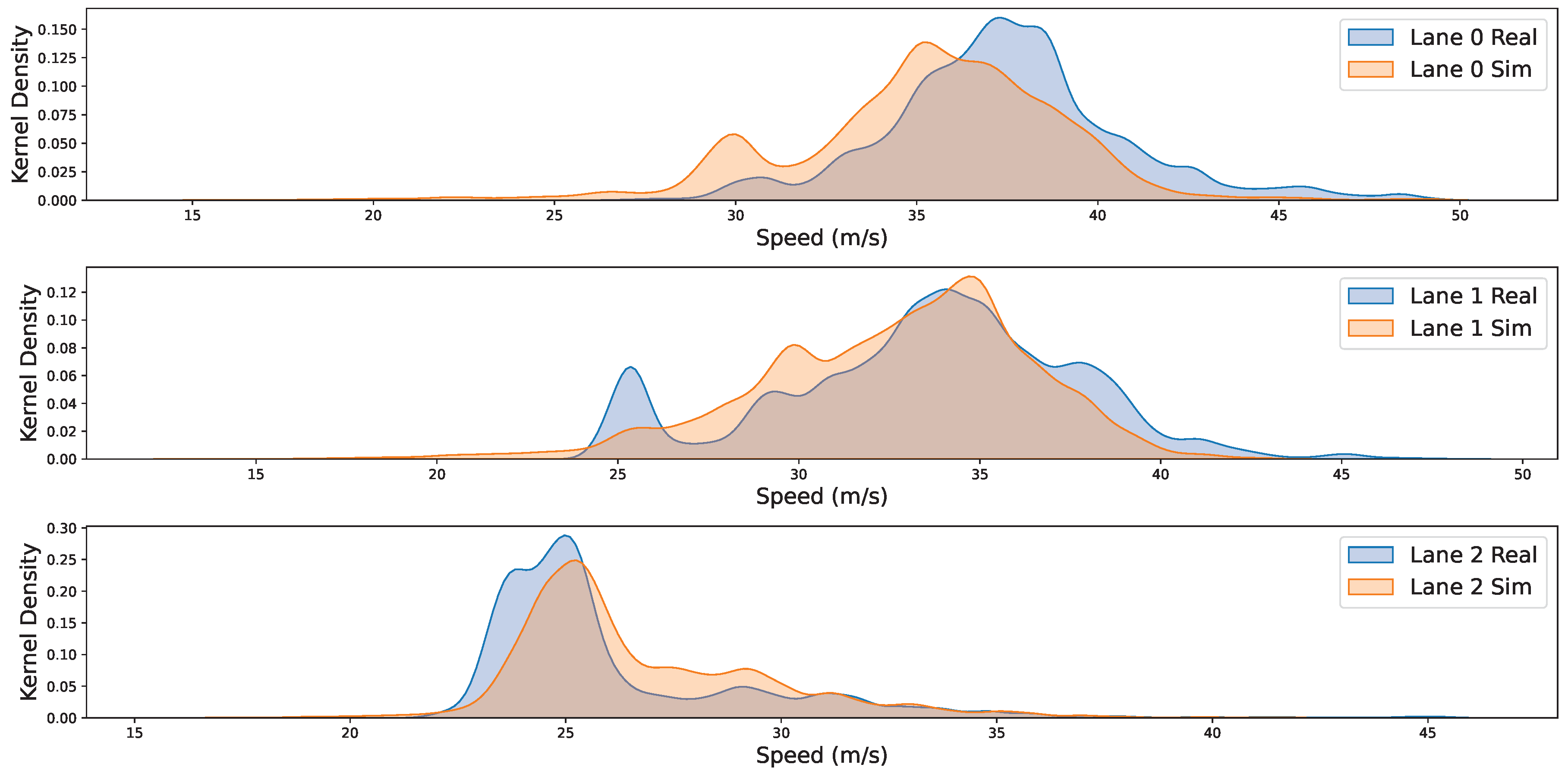
| Speed | 0.252 | 0.312 | 0.266 |
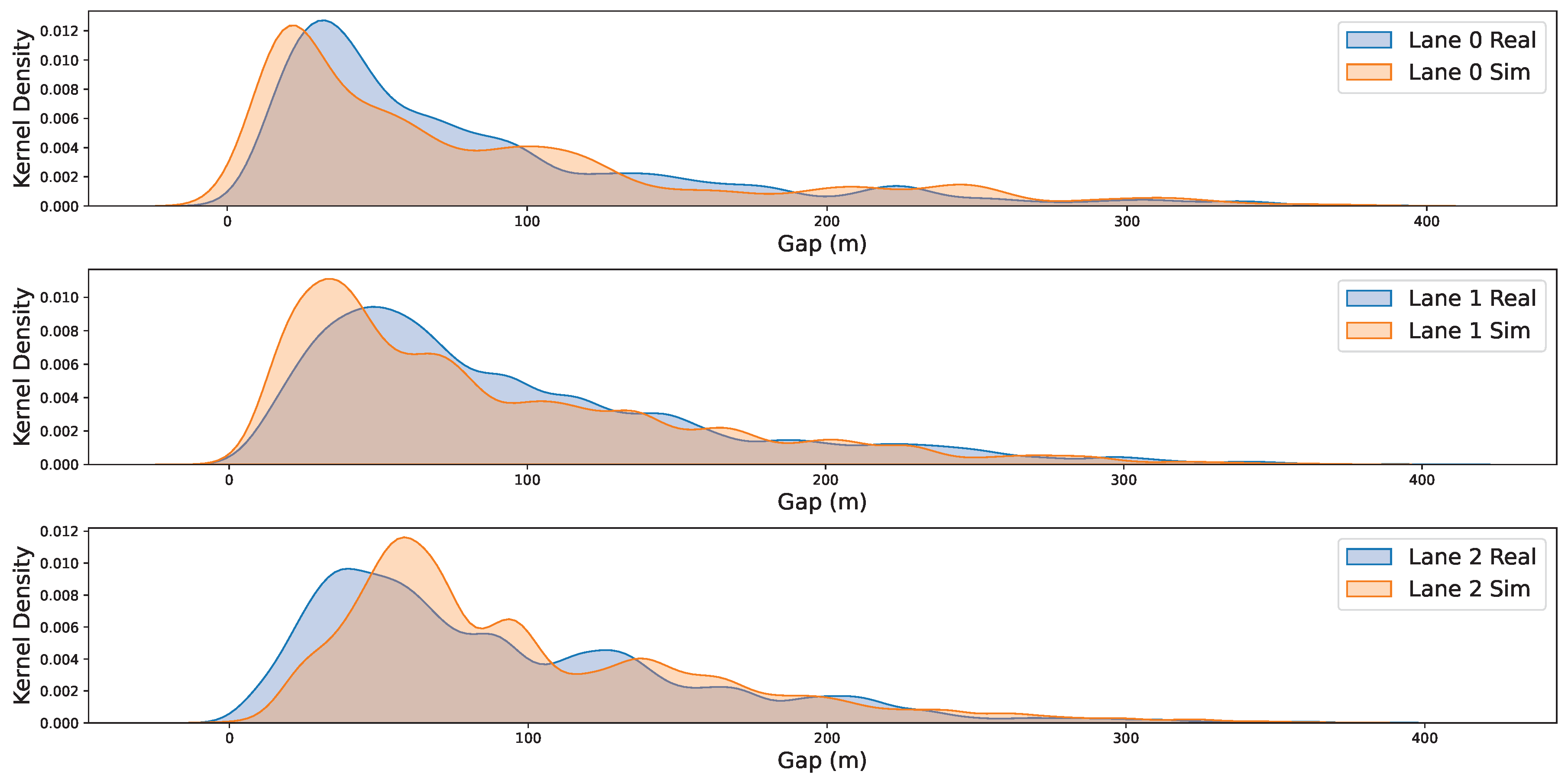
| Gap | 0.225 | 0.139 | 0.268 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, Z.; Wang, J.; Zhang, T.; Yong, X. DTTF-Sim: A Digital Twin-Based Simulation System for Continuous Autonomous Driving Testing. Sensors 2025, 25, 3447. https://doi.org/10.3390/s25113447
Liang Z, Wang J, Zhang T, Yong X. DTTF-Sim: A Digital Twin-Based Simulation System for Continuous Autonomous Driving Testing. Sensors. 2025; 25(11):3447. https://doi.org/10.3390/s25113447
Chicago/Turabian StyleLiang, Zhigang, Jian Wang, Tingyu Zhang, and Xinyu Yong. 2025. "DTTF-Sim: A Digital Twin-Based Simulation System for Continuous Autonomous Driving Testing" Sensors 25, no. 11: 3447. https://doi.org/10.3390/s25113447
APA StyleLiang, Z., Wang, J., Zhang, T., & Yong, X. (2025). DTTF-Sim: A Digital Twin-Based Simulation System for Continuous Autonomous Driving Testing. Sensors, 25(11), 3447. https://doi.org/10.3390/s25113447