
Driver Steering Intention Prediction for Human-Machine Shared Systems of Intelligent Vehicles Based on CNN-GRU Network


Abstract
1. Introduction
- The highly nonlinear and multidimensional input features (the haptic guidance torque, vehicle state, and driver near and far points) of the driver steering intention prediction model are extracted based on the CNN module.
- The CNN and GRU networks are combined to predict the steering intention of drivers accurately by considering the haptic interaction between the driver and the automation system. Moreover, the proposed driver intention prediction strategy is validated through driving simulator experiments.
2. Experimental Design
2.1. Participants
2.2. Apparatus
2.3. Experimental Conditions and Scenario
2.4. Data Analysis
3. Predictive Model of Driver Steering Intention
3.1. Feature Learning
3.2. The Hybrid CNN-GRU Model
3.3. Model Evaluation
4. Experimental Results
- LSTM Network: The LSTM network was structured with a 5-180-1 three-layer configuration, and the Adam optimization solver was employed with a learning rate of 0.005.
- BP Network: The BP network consisted of 5-6-1 three layers, and the target training accuracy was set to 0.001, which ensures model convergence and the minimum prediction error.
- CNN Network: The CNN network was made up of a 3-layer architecture, in which the convolution layers are a 1 × 10 filter size, and the fully connected layers were configured with 128 neurons for feature extraction. The learning rate of the Adam optimizer was set to 0.005 to achieve training.
- GRU Network: The GRU network was structured with three layers, arranged in a 5-180-1 configuration. The Adam optimizer was applied with a learning rate of 0.005.
- Transformer network: The Transformer network was structured with three layers, an Embedding layer, an Encoder layer, and a Decoder layer. The Adam optimizer was applied with a learning rate of 0.001.
4.1. Steering Torque Prediction of Attentive Drivers
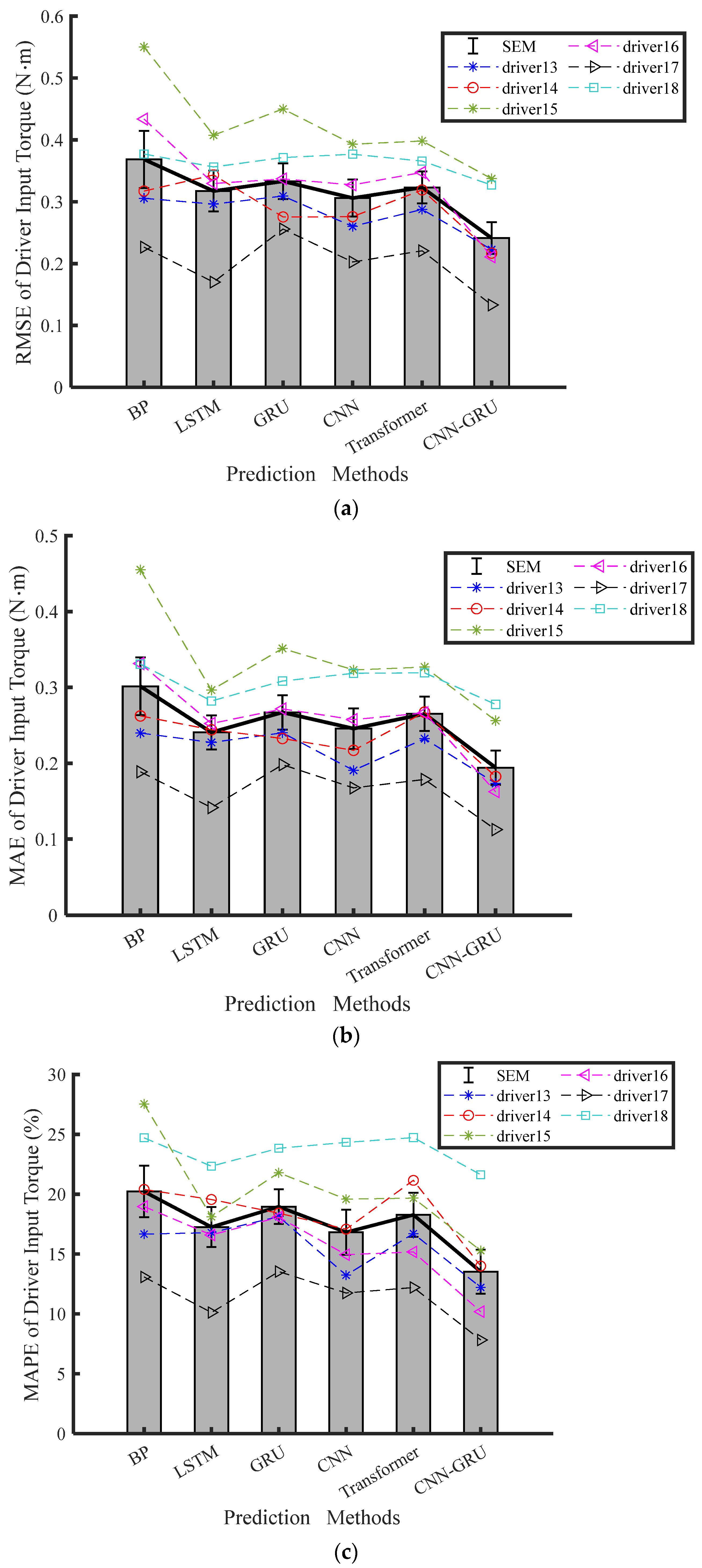
4.2. Steering Torque Prediction of Distracted Drivers
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Song, R.; Li, B. Surrounding vehicles’ lane change maneuver prediction and detection for intelligent vehicles: A comprehensive review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6046–6062. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, B.; Hou, X.; Gan, M.; Wu, W. Human-Centric Spatial Cognition Detecting System Based on Drivers’ Electroencephalogram Signals for Autonomous Driving. Sensors 2025, 25, 397. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Huang, L.; Yao, J.; Su, R. Intention Prediction-Based Control for Vehicle Platoon to Handle Driver Cut-In. IEEE Trans. Intell. Transp. Syst. 2023, 24, 5489–5501. [Google Scholar] [CrossRef]
- Teng, S.; Hu, X.; Deng, P.; Li, B.; Li, Y.; Ai, Y.; Yang, D.; Li, L.; Xuan, Y.Z.; Zhu, F.; et al. Motion planning for autonomous driving: The state of the art and future perspectives. IEEE Trans. Intell. Veh. 2023, 8, 3692–3711. [Google Scholar] [CrossRef]
- Chen, T.; Chen, Y.; Li, H.; Gao, T.; Tu, H.; Li, S. Driver Intent-Based Intersection Autonomous Driving Collision Avoidance Reinforcement Learning Algorithm. Sensors 2022, 22, 9943. [Google Scholar] [CrossRef]
- Oudainia, M.R.; Sentouh, C.; Nguyen, A.-T.; Popieul, J.-C. Adaptive cost function-based shared driving control for cooperative lane-keeping systems with user-test experiments. IEEE Trans. Intell. Veh. 2024, 9, 304–314. [Google Scholar] [CrossRef]
- Marcano, M.; Díaz, S.; Pérez, J.; Irigoyen, E. A review of shared control for automated vehicles: Theory and applications. IEEE Trans. Human-Mach. Syst. 2020, 50, 475–491. [Google Scholar] [CrossRef]
- Yang, L.; Babayi Semiromi, M.; Xing, Y.; Lv, C.; Brighton, J.; Zhao, Y. The Identification of Non-Driving Activities with Associated Implication on the Take-Over Process. Sensors 2022, 22, 42. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, X.; Fu, Z.; Liu, Y.; Ding, Y. Noncooperative-game-theory-based driver-automation shared steering control considering driver steering behavior characteristics. IEEE Internet Things J. 2024, 11, 28465–28479. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Zhao, W.; Xu, C. Decision-making and planning method for autonomous vehicles based on motivation and risk assessment. IEEE Trans. Veh. Technol. 2021, 70, 107–120. [Google Scholar] [CrossRef]
- Guo, H.; Shi, W.; Liu, J.; Guo, J.; Meng, Q.; Cao, D. Game-theoretic human-machine shared steering control strategy under extreme conditions. IEEE Trans. Intell. Veh. 2024, 9, 2766–2779. [Google Scholar] [CrossRef]
- Lazcano, A.M.R.; Niu, T.; Akutain, X.C.; Cole, D.; Shyrokau, B. Mpc-based haptic shared steering system: A driver modeling approach for symbiotic driving. IEEE/ASME Trans. Mechatron. 2021, 26, 1201–1211. [Google Scholar] [CrossRef]
- Lee, H.; Kim, H.; Choi, S. Driving skill modeling using neural networks for performance-based haptic assistance. IEEE Trans. Hum. Mach. Syst. 2021, 51, 198–210. [Google Scholar] [CrossRef]
- Noubissie Tientcheu, S.I.; Du, S.; Djouani, K.; Liu, Q. Data-Driven Controller for Drivers’ Steering-Wheel Operating Behaviour in Haptic Assistive Driving System. Electronics 2024, 13, 1157. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Liang, J.; Yan, Y.; Pi, D.; Zhang, H.; Yin, G. Authority allocation strategy for shared steering control considering human-machine mutual trust level. IEEE Trans. Intell. Veh. 2024, 9, 2002–2015. [Google Scholar] [CrossRef]
- Okada, K.; Sonoda, K.; Wada, T. Transferring from automated to manual driving when traversing a curve via haptic shared control. IEEE Trans. Intell. Veh. 2021, 6, 266–275. [Google Scholar] [CrossRef]
- Bhattacharyya, R.; Jung, S.; Kruse, L.A.; Senanayake, R.; Kochenderfer, M.J. A hybrid rule-based and data-driven approach to driver modeling through particle filtering. IEEE Trans. Intell. Transp. Syst. 2022, 23, 13055–13068. [Google Scholar] [CrossRef]
- Schubert, R.; Richter, E.; Wanielik, G. Comparison and evaluation of advanced motion models for vehicle tracking. In Proceedings of the 2008 11th International Conference on Information Fusion, Cologne, Germany, 30 June–3 July 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–6. [Google Scholar]
- Xing, Y.; Lv, C. Dynamic state estimation for the advanced brake system of electric vehicles by using deep recurrent neural networks. IEEE Trans. Ind. Electron. 2020, 67, 9536–9547. [Google Scholar] [CrossRef]
- Mozaffari, S.; Al-Jarrah, O.Y.; Dianati, M.; Jennings, P.; Mouzakitis, A. Deep learning-based vehicle behavior prediction for autonomous driving applications: A review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 33–47. [Google Scholar] [CrossRef]
- Dong, H.; Shi, J.; Zhuang, W.; Li, Z.; Song, Z. Analyzing the impact of mixed vehicle platoon formations on vehicle energy and traffic efficiencies. Appl. Energy 2024, 377, 124448. [Google Scholar] [CrossRef]
- Koochaki, F.; Najafizadeh, L. A data-driven framework for intention prediction via eye movement with applications to assistive systems. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 974–984. [Google Scholar] [CrossRef] [PubMed]
- Deng, Q.; Soffker, D. A review of HMM-based approaches of driving behaviors recognition and prediction. IEEE Trans. Intell. Veh. 2022, 7, 21–31. [Google Scholar] [CrossRef]
- Xie, G.; Gao, H.; Qian, L.; Huang, B.; Li, K.; Wang, J. Vehicle Trajectory Prediction by Integrating Physics- and Maneuver-Based Approaches Using Interactive Multiple Models. IEEE Trans. Ind. Electron. 2018, 65, 5999–6008. [Google Scholar] [CrossRef]
- Lee, S.; Khan, M.Q.; Husen, M.N. Continuous Car Driving Intent Detection Using Structural Pattern Recognition. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1001–1013. [Google Scholar] [CrossRef]
- Ou, C.; Karray, F. Deep learning-based driving maneuver prediction system. IEEE Trans. Veh. Technol. 2022, 69, 1328–1340. [Google Scholar] [CrossRef]
- Lupberger, S.; Degel, W.; Odenthal, D.; Bajcinca, N. Nonlinear control design for regenerative and hybrid antilock braking in electric vehicles. IEEE Trans. Control Syst. Technol. 2022, 30, 1375–1389. [Google Scholar] [CrossRef]
- Okamoto, K.; Tsiotras, P. Data-driven human driver lateral control models for developing haptic-shared control advanced driver assist systems. Robot. Auton. Syst. 2019, 114, 155–171. [Google Scholar] [CrossRef]
- Cheng, K.; Sun, D.; Qin, D.; Cai, J.; Chen, C. Deep learning approach for unified recognition of driver speed and lateral intentions using naturalistic driving data. Neural Netw. 2024, 179, 106569. [Google Scholar] [CrossRef]
- Jahan, I.A.; Huq, A.S.; Mahadi, M.K.; Jamil, I.A.; Shahriar, M.Z. RoadSense: A Framework for Road Condition Monitoring using Sensors and Machine Learning. IEEE Trans. Intell. Veh. 2024; early access. [Google Scholar] [CrossRef]
- Dey, R.; Salem, F.M. Gate-variants of Gated Recurrent Unit (GRU) neural networks. In Proceedings of the 2017 IEEE 60th International Midwest Symposium on Circuits and Systems (MWSCAS), Boston, MA, USA, 6–9 August 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1597–1600. [Google Scholar]
- Xu, F.-X.; Feng, S.-Y.; Nacpil, E.J.C.; Wang, Z.; Wang, G.-Q.; Zhou, C. Modeling lateral control behaviors of distracted drivers for haptic-shared steering system. IEEE Trans. Intell. Transp. Syst. 2023, 24, 14772–14782. [Google Scholar] [CrossRef]
- Choi, G.; Lim, K.; Pan, S.B. Driver Identification System Using 2D ECG and EMG Based on Multistream CNN for Intelligent Vehicle. IEEE Sens. Lett. 2022, 6, 6001904. [Google Scholar] [CrossRef]
- Nguyen, D.-L.; Putro, M.D.; Jo, K.-H. Lightweight CNN-Based Driver Eye Status Surveillance for Smart Vehicles. IEEE Trans. Ind. Inf. 2024, 20, 3154–3162. [Google Scholar] [CrossRef]
- Cura, A.; Küçük, H.; Ergen, E.; Öksüzoğlu, İ.B. Driver profiling using long short term memory (LSTM) and convolutional neural network (CNN) methods. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6572–6582. [Google Scholar] [CrossRef]
- Uddin, M.Z.; Hassan, M.M. Activity Recognition for Cognitive Assistance Using Body Sensors Data and Deep Convolutional Neural Network. IEEE Sens. J. 2019, 19, 8413–8419. [Google Scholar] [CrossRef]
- Krasniuk, S.; Toxopeus, R.; Knott, M.; McKeown, M.; Crizzle, A.M. The effectiveness of driving simulator training on driving skills and safety in young novice drivers: A systematic review of interventions. J. Saf. Res. 2024, 91, 20–37. [Google Scholar] [CrossRef]
- Wang, Z.; Suga, S.; Nacpil, E.J.C.; Yang, B.; Nakano, K. Effect of Fixed and sEMG-Based Adaptive Shared Steering Control on Distracted Driver Behavior. Sensors 2021, 21, 7691. [Google Scholar] [CrossRef]
- Xu, F.-X.; Zhou, C.; Liu, X.-H.; Wang, J. GRNN inverse system based decoupling control strategy for active front steering and hydro-pneumatic suspension systems of emergency rescue vehicle. Mech. Syst. Signal Process. 2022, 167, 108595. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition | Driver State | Haptic Guidance |
|---|---|---|
| 1 | Attentive | HG-Fixed |
| 2 | Attentive | HG-Adaptive |
| 3 | Distracted | HG-Fixed |
| 4 | Distracted | HG-Adaptive |
| Data | Variable | Description |
|---|---|---|
| Input | Lateral error at the near point (m) | |
| Yaw error at the far point (deg) | ||
| Angle between the vehicle’s longitudinal axis and the current lane (deg) | ||
| SWA | Steering wheel angle (deg) | |
| Haptic guidance torque (N⋅m) | ||
| Output | Driver input torque (N⋅m) |
| Variable | CNN-GRU (Ours) (1) M(SD) | GRU (2) M(SD) | LSTM (3) M(SD) | BP (4) M(SD) | CNN (5) M(SD) | Transformer (6) M(SD) | 1–2 | 1–3 | 1–4 | 1–5 | 1–6 | 2–3 | 2–4 | 3–4 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Condition 1 | RMSE (N·m) | 0.2172 (0.0257) | 0.3184 (0.0261) | 0.2754 (0.034) | 0.3191 (0.0587) | 0.2894 (0.0461) | 0.3132 (0.0258) | 0.000 | ** | ** | ** | ** | ** | 0.651 | 1.000 | 0.421 |
| MAE (N·m) | 0.1724 (0.0194) | 0.2446 (0.0059) | 0.2192 (0.032) | 0.2436 (0.062) | 0.2366 (0.0512) | 0.2460 (0.0674) | 0.000 | ** | ** | * | * | * | 0.845 | 1.000 | 1.000 | |
| MAPE (%) | 11.26 (0.544) | 16.09 (0.341) | 14.63 (0.96) | 15.44 (1.631) | 15.61 (3.265) | 13.14 (7.747) | 0.000 | ** | ** | * | * | * | 1.000 | 1.000 | 1.000 | |
| Condition 2 | RMSE (N·m) | 0.2287 (0.0174) | 0.3119 (0.0212) | 0.3552 (0.023) | 0.3810 (0.020) | 0.2942 (0.032) | 0.3278 (0.0437) | 0.000 | ** | ** | ** | * | * | 1.000 | * | 1.000 |
| MAE (N·m) | 0.1860 (0.0142) | 0.2559 (0.0177) | 0.2785 (0.017) | 0.3003 (0.016) | 0.2291 (0.039) | 0.2665 (0.045) | 0.000 | *** | ** | ** | 0.293 | * | 1.000 | ** | 1.000 | |
| MAPE (%) | 12.83 (1.173) | 17.47 (1.303) | 18.38 (1.428) | 19.62 (1.324) | 15.21 (3.563) | 17.67 (3.742) | 0.000 | ** | 0.1897 | ** | 0.061 | * | 1.000 | 0.197 | 1.000 | |
| Variable | CNN-GRU (Ours) (1) M(SD) | GRU (2) M(SD) | LSTM (3) M(SD) | BP (4) M(SD) | CNN (5) M(SD) | Transformer (6) M(SD) | p | 1–2 | 1–3 | 1–4 | 1–5 | 1–6 | 2–3 | 2–4 | 3–4 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Condition 3 | RMSE (N·m) | 0.2054 (0.0158) | 0.3076 (0.0095) | 0.3170 (0.0338) | 0.2892 (0.0139) | 0.2624 (0.0387) | 0.2839 (0.0354) | 0.000 | * | * | * | * | ** | 1.000 | 1.000 | 1.000 |
| MAE (N·m) | 0.1595 (0.0139) | 0.2357 (0.0122) | 0.2294 (0.0163) | 0.2242 (0.0101) | 0.2037 (0.0296) | 0.2286 (0.0338) | 0.000 | * | ** | * | 0.113 | 0.16 | 1.000 | 1.000 | 1.000 | |
| MAPE (%) | 10.82 (2.44) | 16.87 (1.75) | 16.17 (3.38) | 14.66 (1.93) | 13.70 (2.41) | 15.12 (2.15) | 0.000 | * | * | ** | * | 0.095 | 1.000 | 0.526 | 1.000 | |
| Condition 4 | RMSE (N·m) | 0.2413 (0.0316) | 0.3331 (0.0288) | 0.3171 (0.0329) | 0.3684 (0.0461) | 0.3159 (0.0731) | 0.3231 (0.0629) | 0.000 | ** | * | * | * | * | 1.000 | 1.000 | 0.6147 |
| MAE (N·m) | 0.1941 (0.0251) | 0.2670 (0.0227) | 0.2423 (0.0230) | 0.3013 (0.0380) | 0.2457 (0.0654) | 0.2651 (0.0553) | 0.000 | * | * | * | 0.057 | ** | 0.4218 | 0.6023 | 0.2667 | |
| MAPE (%) | 13.52 (1.95) | 18.97 (1.45) | 17.26 (1.67) | 20.23 (2.15) | 16.82 (4.61) | 18.27 (4.49) | 0.000 | ** | * | * | * | ** | 0.3647 | 1.000 | 0.4931 | |
| Variable | RMSE (N·m) | MAE (N·m) | |
|---|---|---|---|
| Windows size of input data | 5 | 0.1802 | 0.0997 |
| 10 | 0.2172 | 0.1205 | |
| 20 | 0.3327 | 0.2017 | |
| Number of GRU hidden units | 60 | 0.2872 | 0.1665 |
| 180 | 0.2172 | 0.1205 | |
| 240 | 0.3534 | 0.2413 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, C.; Zhang, F.; Nacpil, E.J.C.; Wang, Z.; Xu, F.-X. Driver Steering Intention Prediction for Human-Machine Shared Systems of Intelligent Vehicles Based on CNN-GRU Network. Sensors 2025, 25, 3224. https://doi.org/10.3390/s25103224
Zhou C, Zhang F, Nacpil EJC, Wang Z, Xu F-X. Driver Steering Intention Prediction for Human-Machine Shared Systems of Intelligent Vehicles Based on CNN-GRU Network. Sensors. 2025; 25(10):3224. https://doi.org/10.3390/s25103224
Chicago/Turabian StyleZhou, Chen, Fan Zhang, Edric John Cruz Nacpil, Zheng Wang, and Fei-Xiang Xu. 2025. "Driver Steering Intention Prediction for Human-Machine Shared Systems of Intelligent Vehicles Based on CNN-GRU Network" Sensors 25, no. 10: 3224. https://doi.org/10.3390/s25103224
APA StyleZhou, C., Zhang, F., Nacpil, E. J. C., Wang, Z., & Xu, F.-X. (2025). Driver Steering Intention Prediction for Human-Machine Shared Systems of Intelligent Vehicles Based on CNN-GRU Network. Sensors, 25(10), 3224. https://doi.org/10.3390/s25103224