
Soil Porosity Detection Method Based on Ultrasound and Multi-Scale Feature Extraction

 , , and
, , and
Abstract
1. Introduction
2. Materials and Methods
2.1. Preparation of Soil Samples
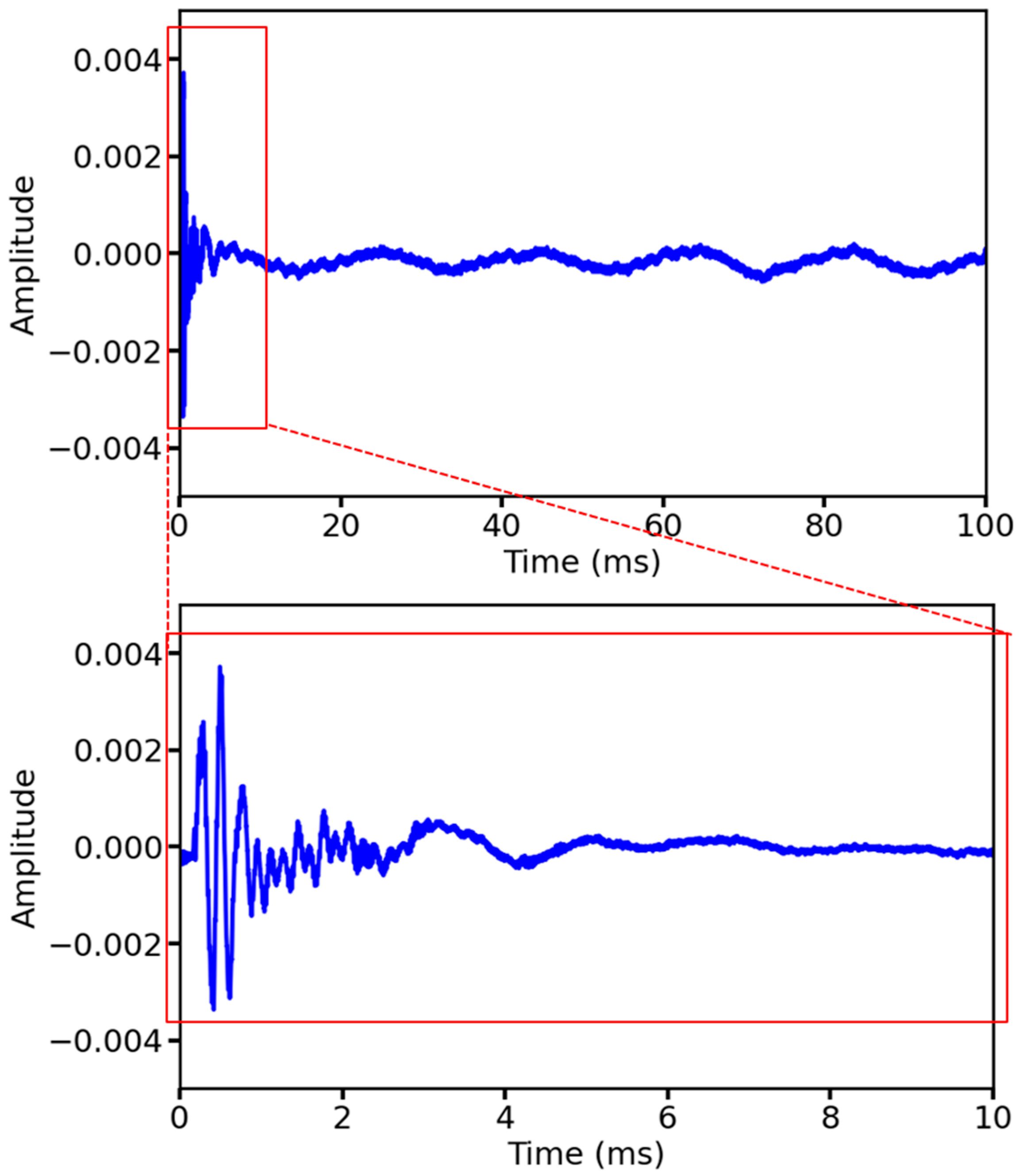
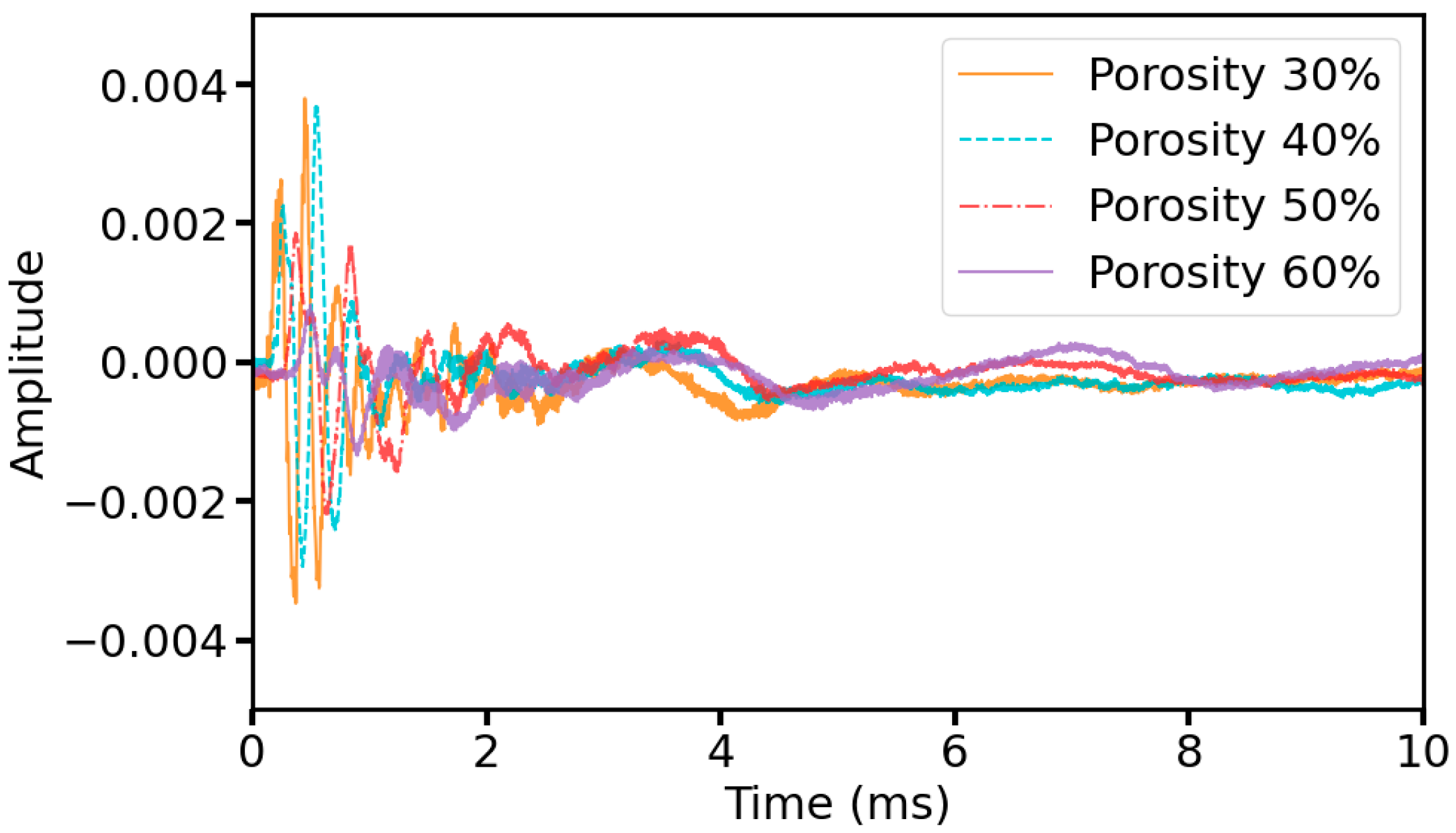
2.2. Ultrasonic Data Acquisition
2.3. Ultrasonic Data Preprocessing
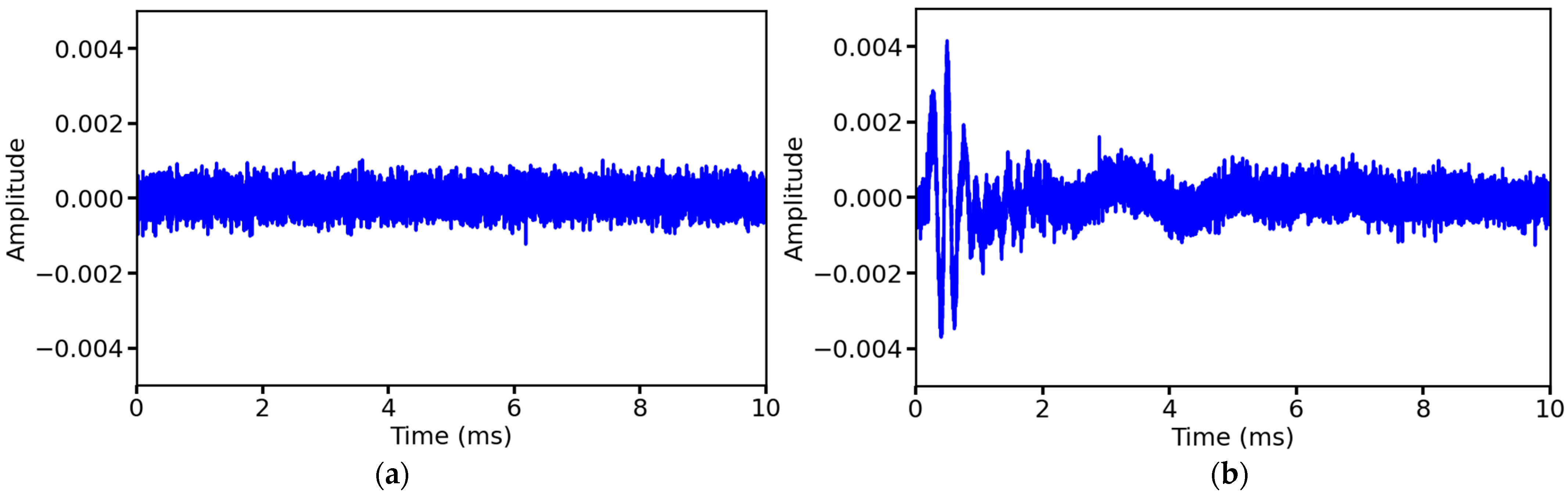
2.3.1. Add Gaussian White Noise
- Original signal power calculation:
- 2.
- Noise power calculation:
- 3.
- Generate Gaussian white noise:
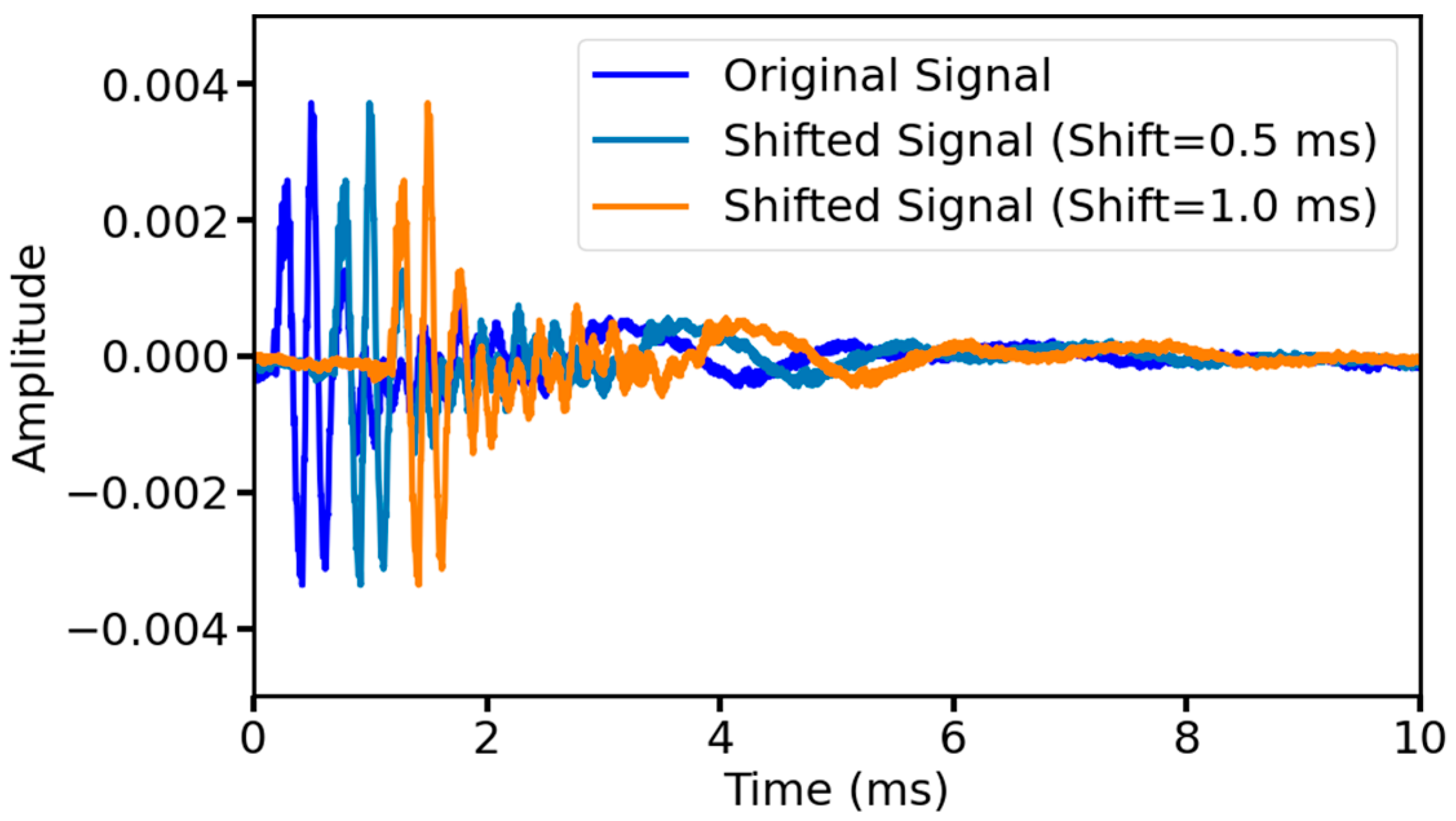
2.3.2. Time Shift
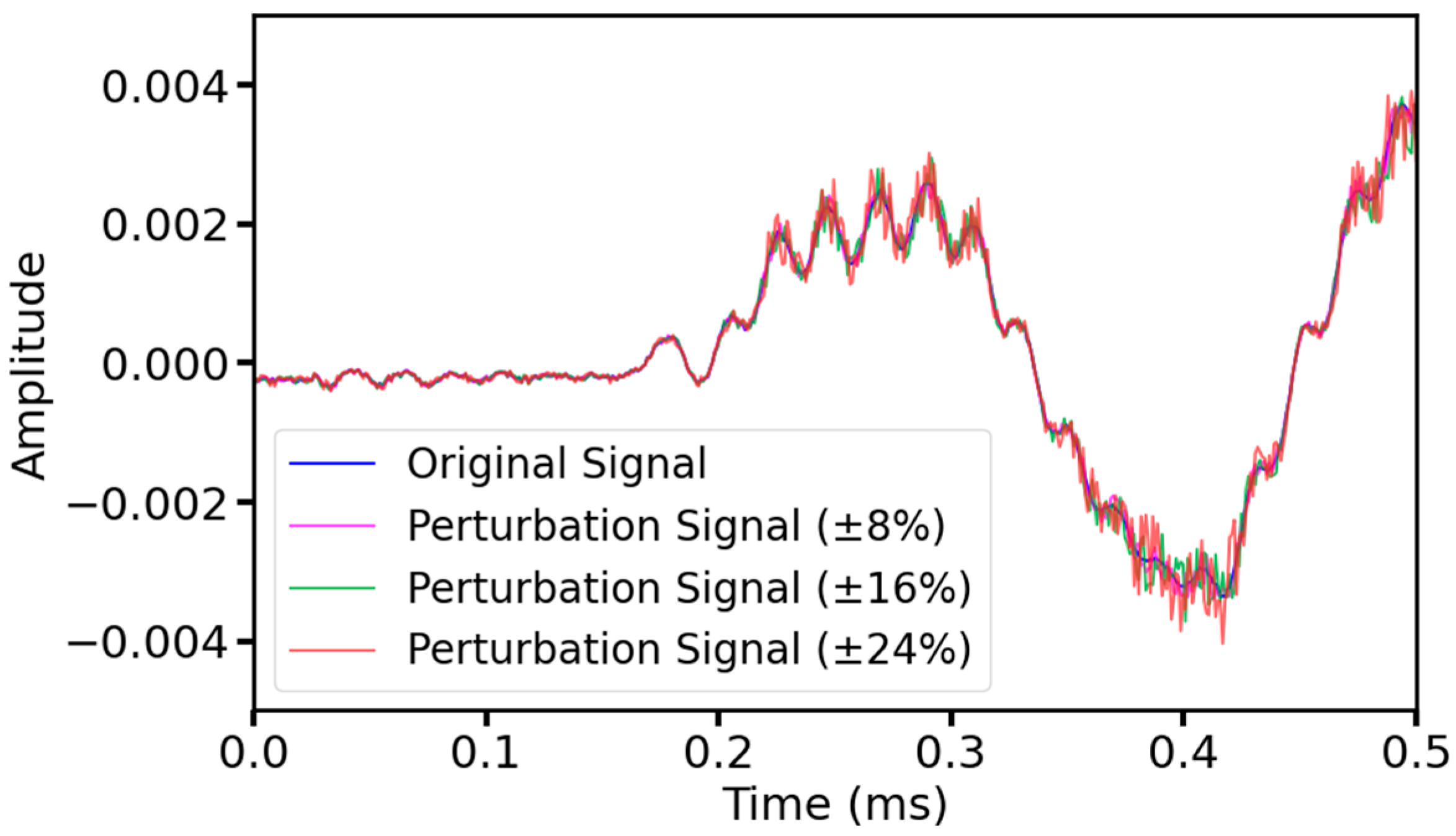
2.3.3. Random Perturbation
2.4. Introduction of Soil Porosity Testing Model
2.4.1. Multi-Scale Feature Extraction
2.4.2. MSRCNN-LSTMATT Based on Multi-Scale Feature Extraction
2.5. Performance Evaluation Metrics for the Model
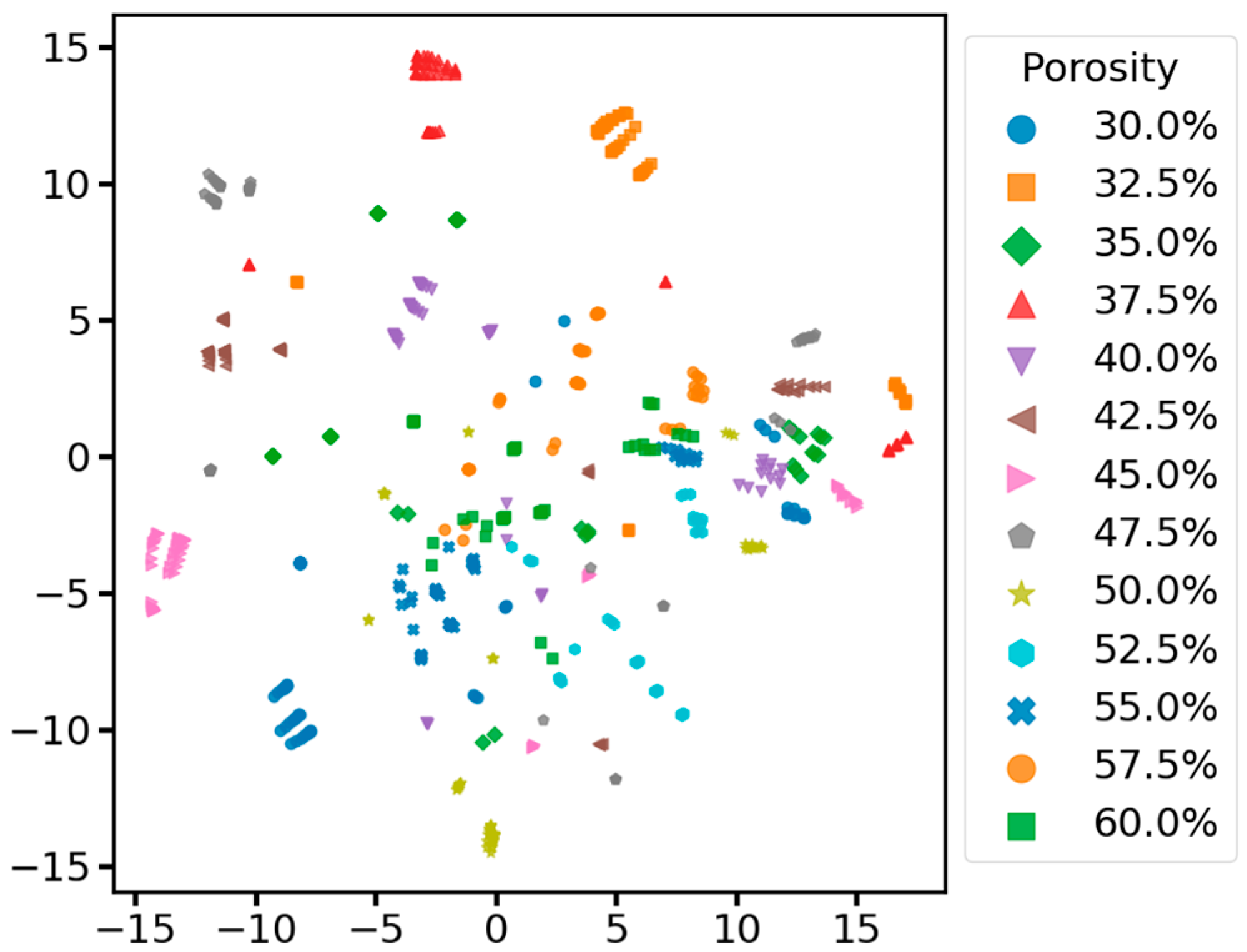
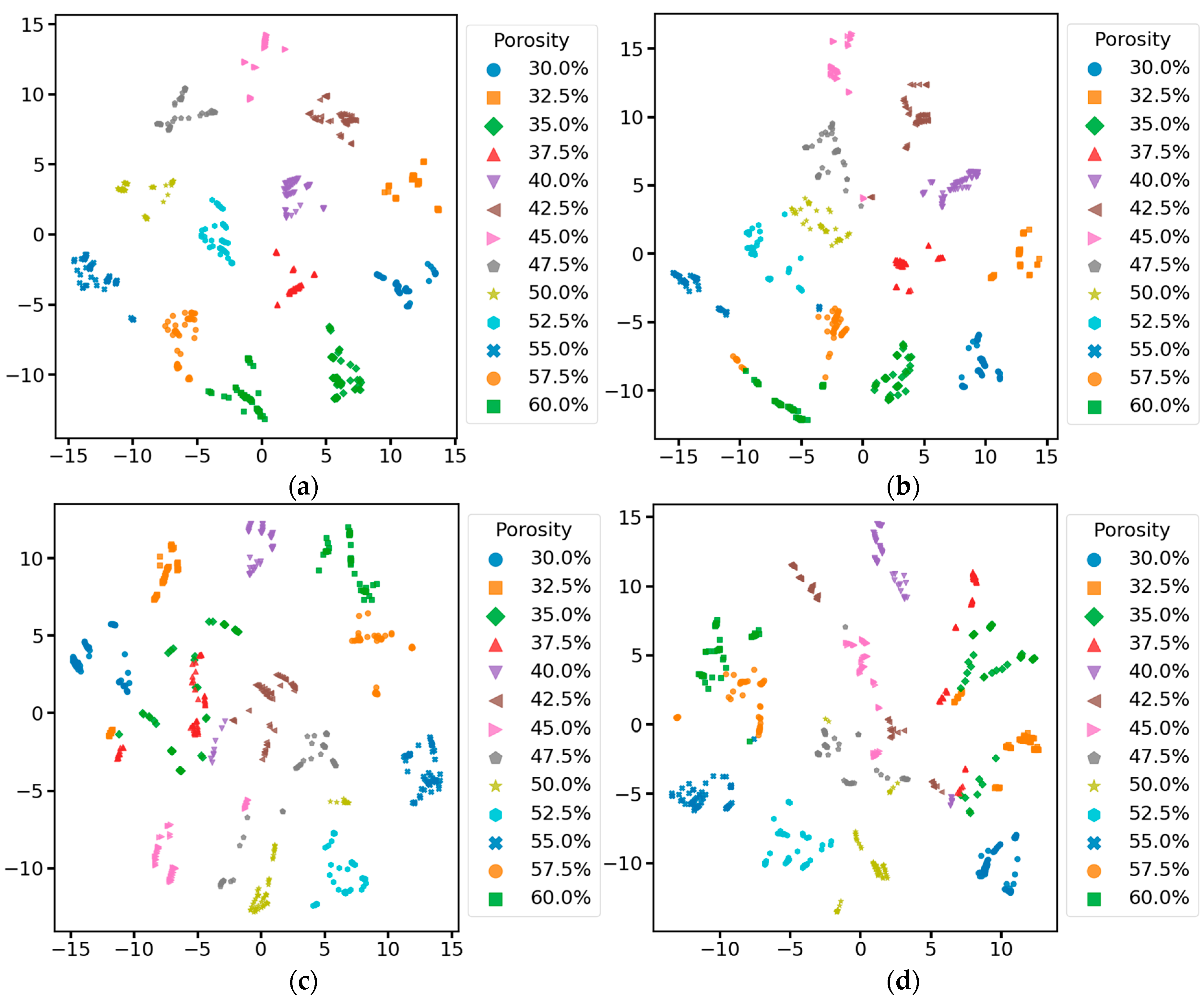
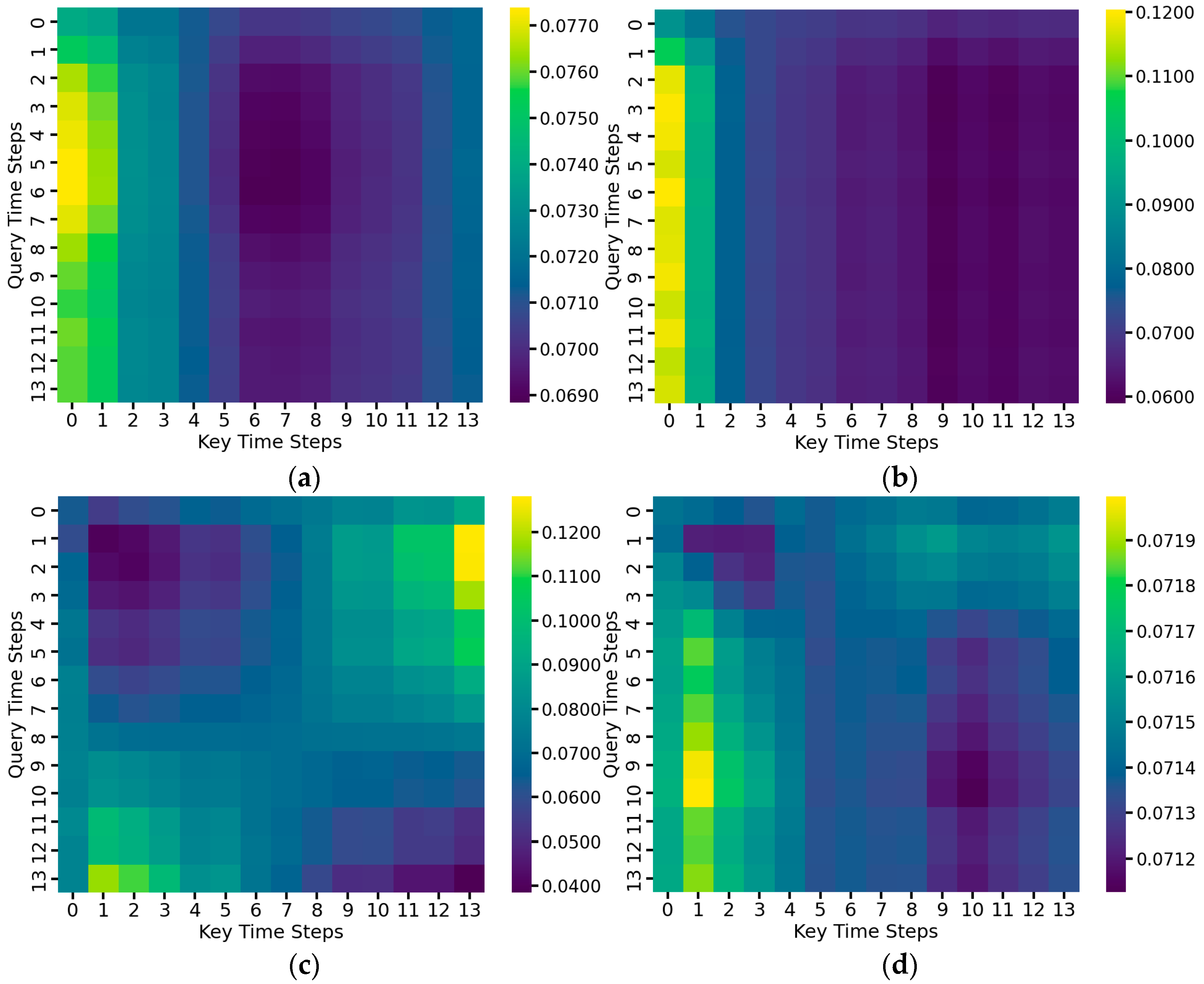
2.6. Visualization of Model Performance
3. Results and Discussion
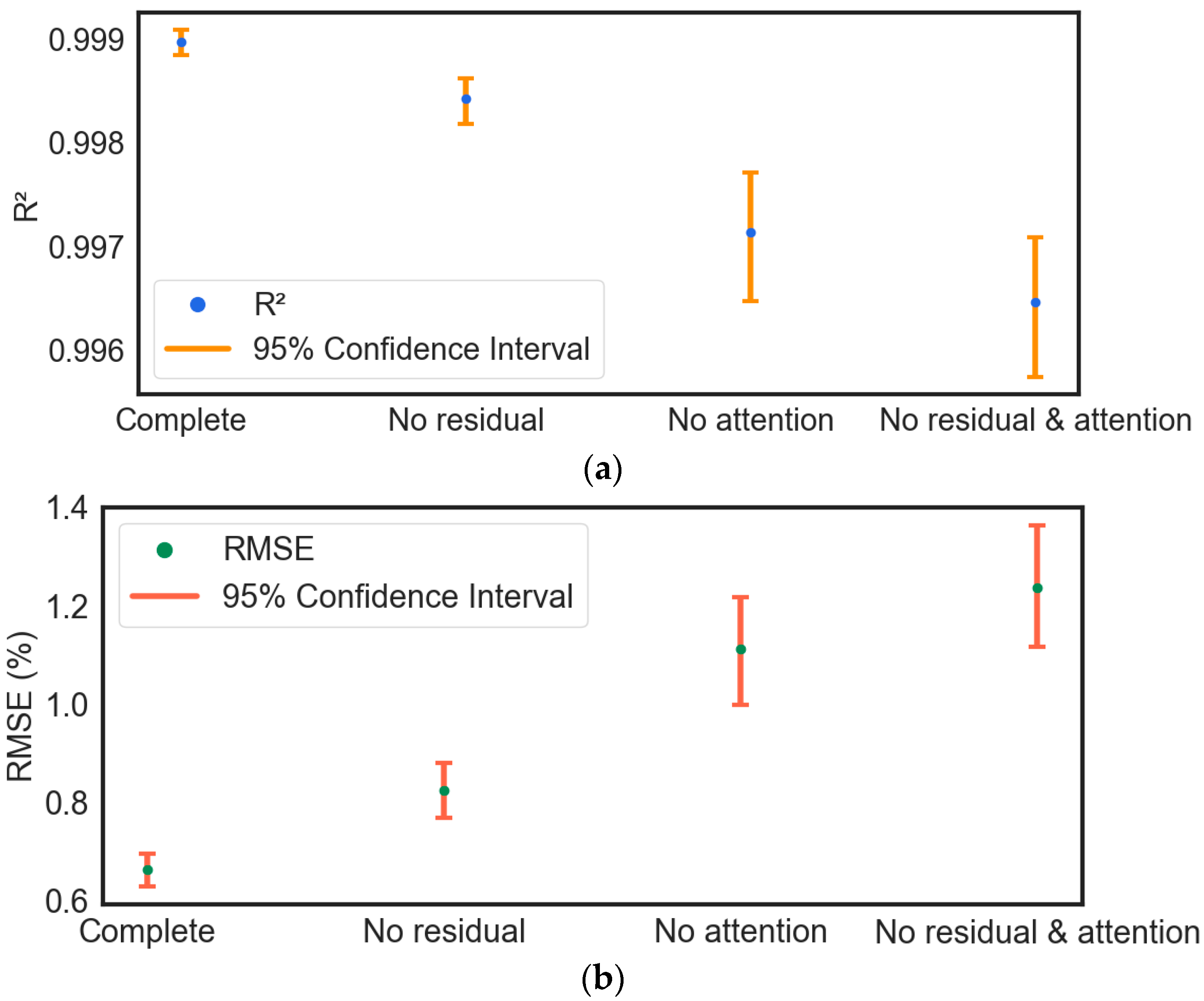
3.1. Ablation Experiment
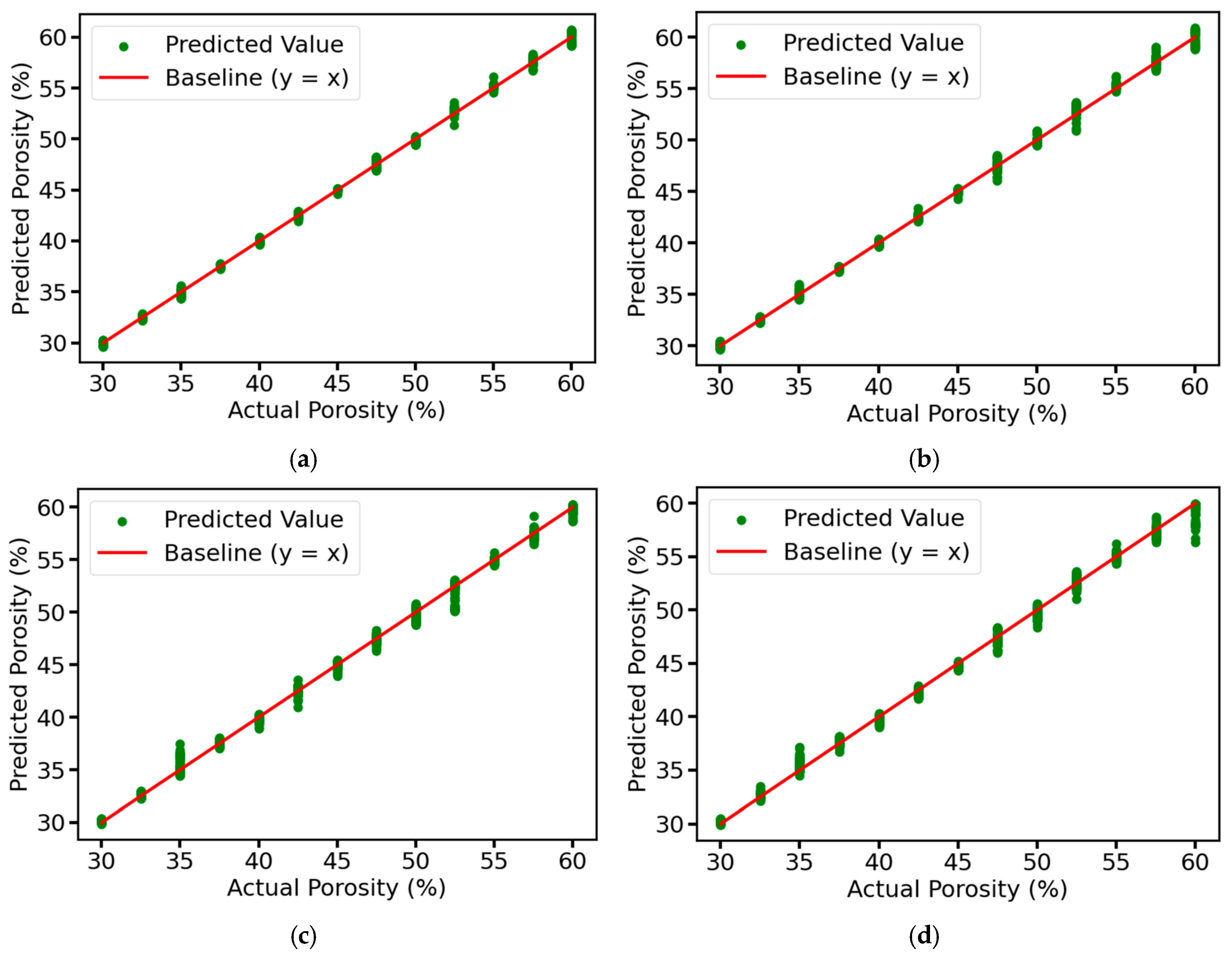
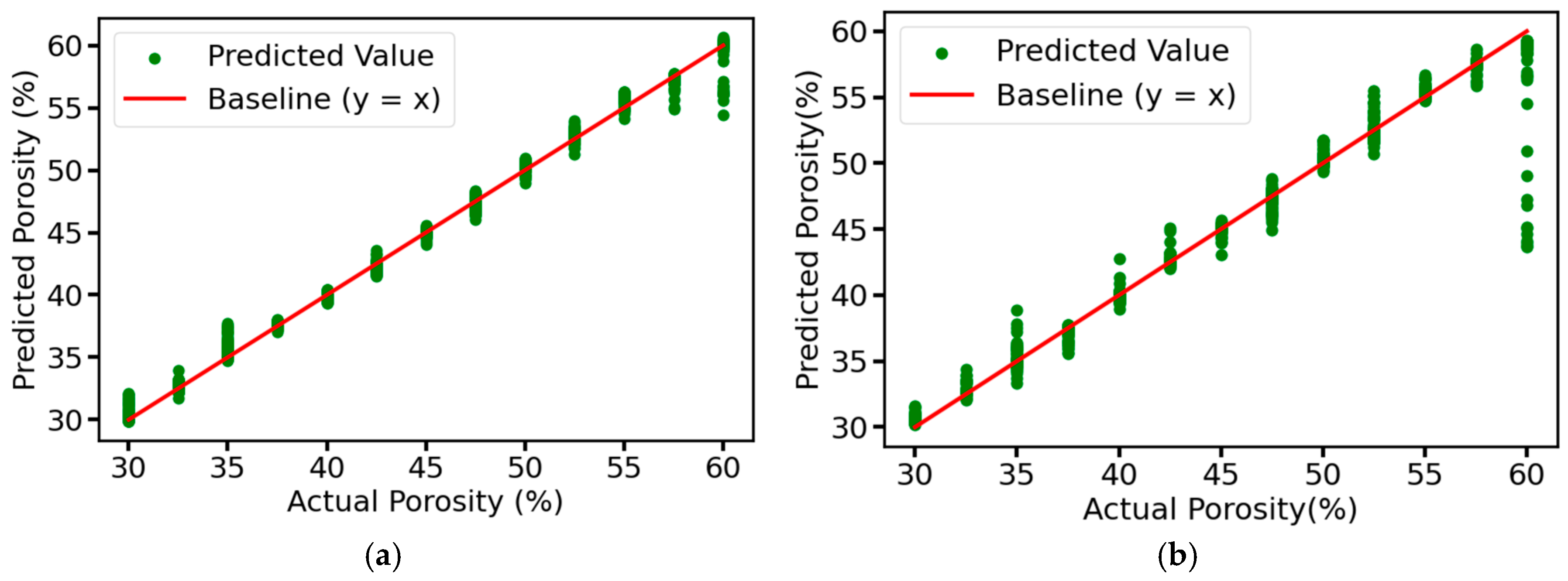
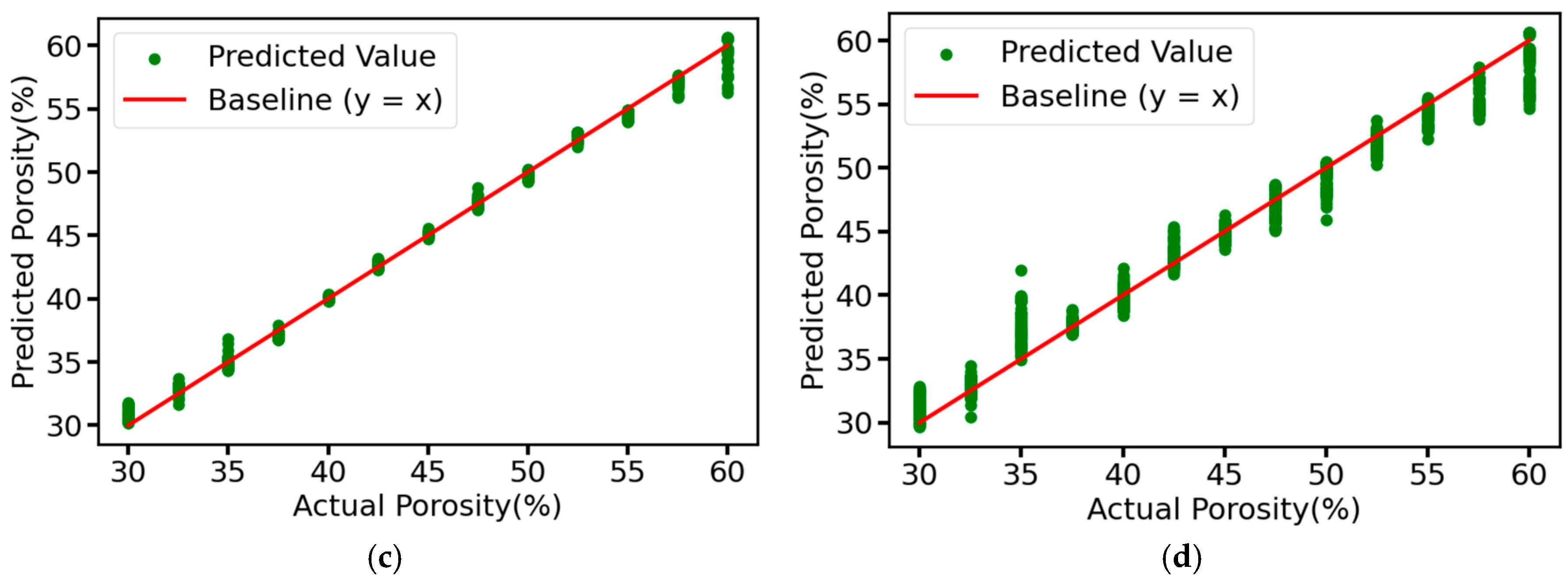
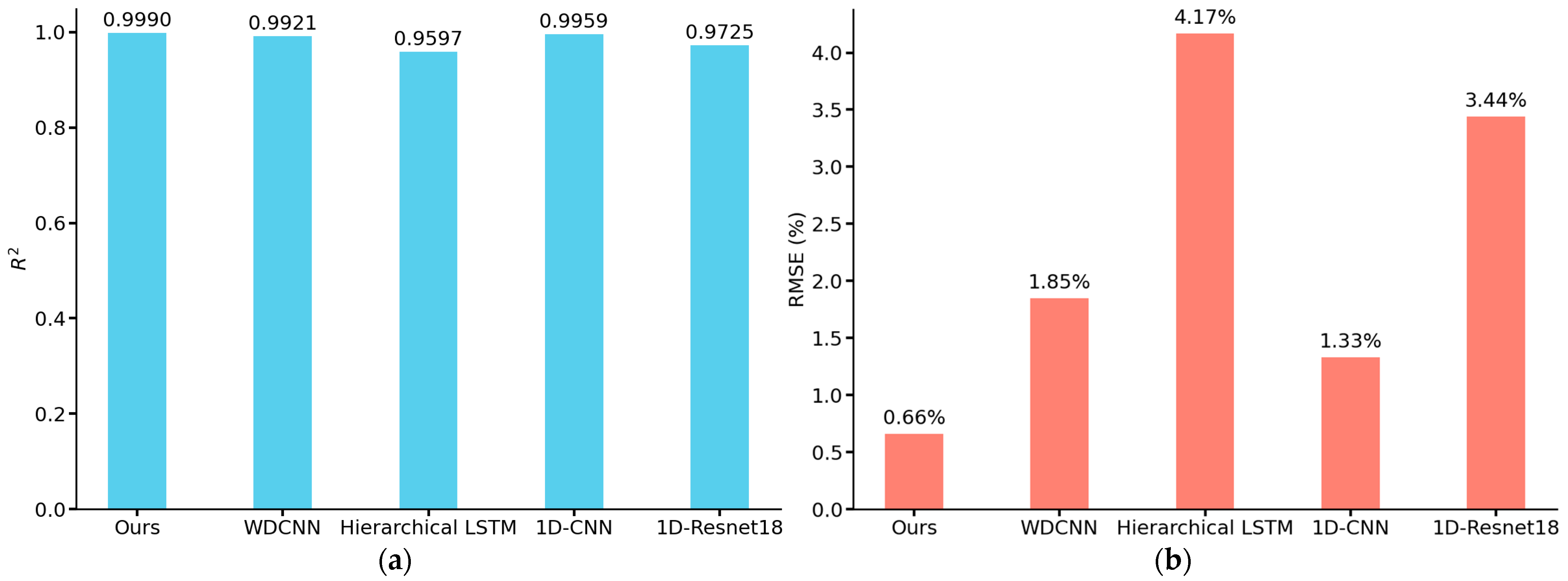
3.2. Model Comparison
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Robinson, D.; Hockley, N.; Cooper, D.; Emmett, B.; Keith, A.; Lebron, I.; Reynolds, B.; Tipping, E.; Tye, A.; Watts, C. Natural capital and ecosystem services, developing an appropriate soils framework as a basis for valuation. Soil Biol. Biochem. 2013, 57, 1023–1033. [Google Scholar] [CrossRef]
- Yagüe, M.R.; Domingo-Olivé, F.; Bosch-Serra, À.D.; Poch, R.M.; Boixadera, J. Dairy cattle manure effects on soil quality: Porosity, earthworms, aggregates and soil organic carbon fractions. Land Degrad. Dev. 2016, 27, 1753–1762. [Google Scholar] [CrossRef]
- Gondim, J.E.F.; Souza, T.; Portela, J.C.; Santos, D.; Nascimento, G.d.S.; Da Silva, L.J.R. Soil physical-chemical traits and soil quality index in a tropical Cambisol as influenced by land uses and soil depth at Apodi Plateau, Northeastern Brazil. Int. J. Plant Prod. 2023, 17, 491–501. [Google Scholar] [CrossRef]
- Pezarico, C.R.; Vitorino, A.; Mercante, F.; Daniel, O. Indicadores de qualidade do solo em sistemas agroflorestais. Rev. Cienc. Agrar. 2013, 56, 40–47. [Google Scholar] [CrossRef]
- Vischi Filho, O.J.; de Souz, Z.M.; de Souza, G.S.; da Silva, R.B.; Torres, J.L.R.; de Lima, M.E.; Tavares, R.L.M. Physical attributes and limiting water range as soil quality indicators after mechanical harvesting of sugarcane. Aust. J. Crop Sci. 2017, 11, 169–176. [Google Scholar] [CrossRef]
- Ng, C.W.W.; Peprah-Manu, D. Pore structure effects on the water retention behaviour of a compacted silty sand soil subjected to drying-wetting cycles. Eng. Geol. 2023, 313, 106963. [Google Scholar] [CrossRef]
- Kravchenko, A.N.; Guber, A.K. Soil pores and their contributions to soil carbon processes. Geoderma 2017, 287, 31–39. [Google Scholar] [CrossRef]
- Soares, M.D.R.; Souza, Z.M.d.; Campos, M.C.C.; Cooper, M.; Tavares, R.L.M.; Lovera, L.H.; Farhate, C.V.V.; Cunha, J.M.d. Physical quality and porosity aspects of Amazon anthropogenic soils under different management systems. Appl. Environ. Soil Sci. 2022, 2022, 6132322. [Google Scholar] [CrossRef]
- Nimmo, J.R. Porosity and pore size distribution. Encycl. Soils Environ. 2004, 3, 295–303. [Google Scholar] [CrossRef]
- Kurochkina, G. Study of Porosity of Soils and Soil Minerals Modified by Adsorbed Humic Acid by the Method of Mercury Porosimetry. Eurasian Soil Sci. 2022, 55, 1414–1424. [Google Scholar] [CrossRef]
- Masís-Meléndez, F.; de Jonge, L.W.; Chamindu Deepagoda, T.; Tuller, M.; Moldrup, P. Effects of soil bulk density on gas transport parameters and pore-network properties across a sandy field site. Vadose Zone J. 2015, 14, 1–12. [Google Scholar] [CrossRef]
- Warner, G.; Nieber, J.; Moore, I.; Geise, R.A. Characterizing macropores in soil by computed tomography. Soil Sci. Soc. Am. J. 1989, 53, 653–660. [Google Scholar] [CrossRef]
- Fu, Y.; Tian, Z.; Amoozegar, A.; Heitman, J. Measuring dynamic changes of soil porosity during compaction. Soil Tillage Res. 2019, 193, 114–121. [Google Scholar] [CrossRef]
- Paz da Silva, F.; Matos, R.S.; da Fonseca Filho, H.D.; da Silva, M.R.P.; Ţălu, Ş.; dos Santos, Y.T.B.; da Silva, I.C.; Martins, C.O.D. Non-destructive ultrasonic testing and machine learning-assisted early detection of carburizing damage in HP steel pyrolysis furnace tubes. Measurement 2023, 218, 113221. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, M.; Dong, B.; Ma, H. Quantitative evaluation of steel corrosion induced deterioration in rubber concrete by integrating ultrasonic testing, machine learning and mesoscale simulation. Cem. Concr. Compos. 2022, 128, 104426. [Google Scholar] [CrossRef]
- Prakash, N.; Nieberl, D.; Mayer, M.; Schuster, A. Learning defects from aircraft NDT data. NDT E Int. 2023, 138, 102885. [Google Scholar] [CrossRef]
- Bradley, S.G.; Ghimire, C.; Taylor, A. Estimation of the porosity of agricultural soils using non-contact ultrasound sensing. Soil Adv. 2024, 1, 100003. [Google Scholar] [CrossRef]
- Wang, S.; Li, Z.; Gao, Z.; Zhou, Y.; Hu, R. Ultrasonic properties and damage expression of frozen soil-rock mixture with various block conditions. Environ. Earth Sci. 2024, 83, 376. [Google Scholar] [CrossRef]
- Orhan, U.; Kilinc, E.; Albayrak, F.; Aydin, A.; Torun, A. Ultrasound penetration-based digital soil texture analyzer. Arab. J. Sci. Eng. 2022, 47, 10751–10767. [Google Scholar] [CrossRef]
- Woo, D.K.; Do, W.; Hong, J.; Choi, H. A novel and non-invasive approach to evaluating soil moisture without soil disturbances: Contactless ultrasonic system. Sensors 2022, 22, 7450. [Google Scholar] [CrossRef]
- Guo, Y.; Xiao, Z.; Geng, L.; Wu, J.; Zhang, F.; Liu, Y.; Wang, W. Fully convolutional neural network with GRU for 3D braided composite material flaw detection. IEEE Access 2019, 7, 151180–151188. [Google Scholar] [CrossRef]
- Ranjbar, I.; Toufigh, V. Deep long short-term memory (LSTM) networks for ultrasonic-based distributed damage assessment in concrete. Cem. Concr. Res. 2022, 162, 107003. [Google Scholar] [CrossRef]
- Park, S.-H.; Hong, J.-Y.; Ha, T.; Choi, S.; Jhang, K.-Y. Deep learning-based ultrasonic testing to evaluate the porosity of additively manufactured parts with rough surfaces. Metals 2021, 11, 290. [Google Scholar] [CrossRef]
- Shang, L.; Zhang, Z.; Tang, F.; Cao, Q.; Pan, H.; Lin, Z. Signal Process of Ultrasonic Guided Wave for Damage Detection of Localized Defects in Plates: From Shallow Learning to Deep Learning. J. Data Sci. Intell. Syst. 2023, 3, 149–164. [Google Scholar] [CrossRef]
- Wang, J.; Qu, J. Numerical investigations of deep learning-assisted delamination characterization using ultrasonic guided waves. Wave Motion 2025, 134, 103514. [Google Scholar] [CrossRef]
- Shao, W.; Sun, H.; Wang, Y.; Qing, X. Damage Quantification Method for Aircraft Structures Based on Multitask CNN-LSTM and Transfer Learning. IEEE Sens. J. 2024, 24, 9217–9228. [Google Scholar] [CrossRef]
- Ouoba, S.; Cousin, B.; Cherblanc, F.; Koulidiati, J.; Bénet, J.-C. Une méthode mécanique pour déterminer la porosité totale d’un sol. C. R. Mécanique 2014, 342, 732–738. [Google Scholar] [CrossRef]
- Legay, M.; Gondrexon, N.; Le Person, S.; Boldo, P.; Bontemps, A. Enhancement of heat transfer by ultrasound: Review and recent advances. Int. J. Chem. Eng. 2011, 2011, 670108. [Google Scholar] [CrossRef]
- Duan, Y.; Shao, T.; Tao, Y.; Hu, H.; Han, B.; Cui, J.; Yang, K.; Sfarra, S.; Sarasini, F.; Santulli, C. Automatic air-coupled ultrasound detection of impact damages in fiber-reinforced composites based on one-dimension deep learning models. J. Nondestruct. Eval. 2023, 42, 79. [Google Scholar] [CrossRef]
- Wang, L.; Nie, W.; Xie, M.; Wang, Z.; Lu, W.; Chen, D.; Lin, W. Study on Ultrasonic Characteristics and Prediction of Rock with Different Pore Sizes. Shock Vib. 2024, 2024, 5060571. [Google Scholar] [CrossRef]
- Munir, N.; Kim, H.-J.; Park, J.; Song, S.-J.; Kang, S.-S. Convolutional neural network for ultrasonic weldment flaw classification in noisy conditions. Ultrasonics 2019, 94, 74–81. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef] [PubMed]
- Mirza, A.H.; Kerpicci, M.; Kozat, S.S. Efficient online learning with improved LSTM neural networks. Digit. Signal Process. 2020, 102, 102742. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. arXiv 2017, arXiv:1706.03762. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9. [Google Scholar] [CrossRef]
- Yu, L.; Qu, J.; Gao, F.; Tian, Y. A novel hierarchical algorithm for bearing fault diagnosis based on stacked LSTM. Shock Vib. 2019, 2019, 2756284. [Google Scholar] [CrossRef]
- Du, C.; Zhang, X.; Zhong, R.; Li, F.; Yu, F.; Rong, Y.; Gong, Y. Unmanned aerial vehicle rotor fault diagnosis based on interval sampling reconstruction of vibration signals and a one-dimensional convolutional neural network deep learning method. Meas. Sci. Technol. 2022, 33, 065003. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ultrasonic Testing Task | Input Data | Model | Model Performance | |
|---|---|---|---|---|
| Furnace tube carburization damage detection [14] | The features grouped in a 40 × 22 matrix are extracted using a set of 22 FFT coefficients | Gaussian Naive Bayes | Accuracy: 99.2% | |
| Kernel Naive Bayes | Accuracy: 97.5% | |||
| Subspace Discriminant | Accuracy: 90.8% | |||
| Quantitative evaluation of corrosion deterioration of rubberized concrete steel [15] | Ultrasonic amplitude, ultrasonic velocity, and rubber content | Bayesian ridge regression | R2: 0.867 | |
| MAE (g): 2.893 | ||||
| MSE (g2): 12.735 | ||||
| K-nearest neighbor | R2: 0.970 | |||
| MAE (g): 1.256 | ||||
| MSE (g2): 2.880 | ||||
| Random forest | R2: 0.971 | |||
| MAE (g): 1.221 | ||||
| MSE (g2): 2.820 | ||||
| Voting | R2: 0.974 | |||
| MAE (g): 1.176 | ||||
| MSE (g2): 2.431 | ||||
| Bagging | R2: 0.972 | |||
| MAE (g): 1.221 | ||||
| MSE (g2): 2.706 | ||||
| Stacking | R2: 0.973 | |||
| MAE (g): 1.220 | ||||
| MSE (g2): 2.781 | ||||
| Classification of defects from ultrasonic scanning of A380 aircraft components [16] | C-scan images storing Region of Interest labels (rectangle-position, pixel area) and scene labels (defective and good) | HoG-Linear SVM | Accuracy: 99.0% | |
| Recall: 0.9919 | ||||
| Precision: 0.9880 | ||||
| F1-score: 0.984 | ||||
| ROC-AUC: 1.00 | ||||
| SURF-Decision Fine Tree | Accuracy: 97.9% | |||
| Recall: 0.9839 | ||||
| Precision: 0.9700 | ||||
| F1-score: 0.970 | ||||
| ROC-AUC: 0.92 | ||||
| Predicting the content of sand, silt, and clay fractions in soils [19] | Ten characteristic points representative of the curve extracted from the signals obtained from the regression experiments on all soils, and the particle ratios corresponding to the regression experiments on different particles | Support Vector Regression | Sand | R2: 0.52 |
| MAE: 12.42 | ||||
| MSE: 299.68 | ||||
| Silt | R2: 0.10 | |||
| MAE: 13.51 | ||||
| MSE: 310.29 | ||||
| Clay | R2: 0.38 | |||
| MAE: 11.69 | ||||
| MSE: 221.22 | ||||
| Developed a non-destructive method of evaluating soil moisture using a contactless ultrasonic system [20] | Normalized amplitude, energy of Rayleigh leakage waves | Random forest | R2 ≥ 0.98 | |
| RMSE ≤ 0.0089 | ||||
| Layer Name | Kernel/Window Size | Stride | Padding | Output Channels | Neuron | Heads | Activation Function |
|---|---|---|---|---|---|---|---|
| 1DConv_1 | 128 | 15 | NO | 64 | / | / | ReLU |
| Maxpool | 7 | 7 | NO | 64 | / | / | / |
| 1DConv_2 | 64 | 7 | YES | 32 | / | / | ReLU |
| 1DConv_3 | 32 | 7 | YES | 32 | / | / | ReLU |
| 1DConv_4 | 16 | 7 | YES | 32 | / | / | ReLU |
| 1DConv_5 | 8 | 7 | YES | 32 | / | / | ReLU |
| Res Conv | 1 | 7 | NO | 32 | / | / | / |
| LSTM | / | / | / | / | 64 | / | ReLU |
| Mul-ATT(ALL) | / | / | / | / | / | 4 | / |
| Model | R2 | RMSE |
|---|---|---|
| Complete | 0.9990, CI: (0.9989–0.9991) | 0.66%, CI: (0.63–0.70%) |
| No residual | 0.9984, CI: (0.9982–0.9986) | 0.82%, CI: (0.77–0.88%) |
| No attention | 0.9971, CI: (0.9965–0.9977) | 1.11%, CI: (1.00–1.22%) |
| No residual & attention | 0.9965, CI: (0.9957–0.9971) | 1.24%, CI: (1.12–1.36%) |
| Contrast Models | Structure |
|---|---|
| WDCNN | Conv64--Maxpool2--Conv3--Maxpool2--Conv3--Maxpool2--Conv3--Maxpool2--Conv3--Maxpool2--FC100--FC1 |
| Hierarchical LSTM | LSTM64--Dropout--LSTM32--Dropout--LSTM32--Dropout--FC1 |
| 1D-CNN | Conv64--AveragePool8--Conv128--Conv128--AveragePool2--Dropout--FC1024--Dropout--FC1 |
| 1D-Resnet18 | The model is too large to be displayed, please refer to paper [35] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xing, H.; Zhong, Z.; Zhang, W.; Jiang, Y.; Jiang, X.; Yang, X.; Cai, W.; Wu, S.; Qi, L. Soil Porosity Detection Method Based on Ultrasound and Multi-Scale Feature Extraction. Sensors 2025, 25, 3223. https://doi.org/10.3390/s25103223
Xing H, Zhong Z, Zhang W, Jiang Y, Jiang X, Yang X, Cai W, Wu S, Qi L. Soil Porosity Detection Method Based on Ultrasound and Multi-Scale Feature Extraction. Sensors. 2025; 25(10):3223. https://doi.org/10.3390/s25103223
Chicago/Turabian StyleXing, Hang, Zeyang Zhong, Wenhao Zhang, Yu Jiang, Xinyu Jiang, Xiuli Yang, Weizi Cai, Shuanglong Wu, and Long Qi. 2025. "Soil Porosity Detection Method Based on Ultrasound and Multi-Scale Feature Extraction" Sensors 25, no. 10: 3223. https://doi.org/10.3390/s25103223
APA StyleXing, H., Zhong, Z., Zhang, W., Jiang, Y., Jiang, X., Yang, X., Cai, W., Wu, S., & Qi, L. (2025). Soil Porosity Detection Method Based on Ultrasound and Multi-Scale Feature Extraction. Sensors, 25(10), 3223. https://doi.org/10.3390/s25103223