
Simulation of Patch Field Effect in Space-Borne Gravitational Wave Detection Missions

Abstract
1. Introduction
2. Mathematical Modeling of Patch Field Simulation
2.1. Surface Subdivision and Electric Field Modeling
2.1.1. Potential and Charge Distribution
2.1.2. Calculation of Electric Field Force and Stiffness
2.1.3. Algorithm Complexity
2.2. Simulation of a Patch
3. Low-Complexity Calculation Method
3.1. The Theoretical Basis of Charge Equivalence
3.2. Building an Octree
3.3. The Operation Performed on the Octree
3.4. Main Body of the Algorithm
3.4.1. Calculating Equivalent Charges
| Algorithm 1. Calculating equivalent charges | |
| Input: Constructed octree, needed matrixes, triangular elements information | |
| Output: The equivalent charges on two auxiliary surfaces for each node | |
| 1 | parfor each leaf, i |
| 2 | Executing the first and second steps of equivalenting source operation for i in sequence |
| 3 | end parfor |
| 4 | for i = tree_hight : 2 |
| 5 | parfor each node, j, in layer i of the octree |
| 6 | Executing up operation for j |
| 7 | end parfor |
| 11 | end for |
| 12 | for i = 2 : tree_height |
| 13 | parfor each node, j, in layer i of the octree |
| 14 | for each interactive node of the same layer, k, of j |
| 15 | Executing horizontal operation from k to j |
| 16 | end for |
| 17 | end parfor |
| 18 | (if it exists) of the octree |
| 19 | Executing down operation for j |
| 20 | end parfor |
| 24 | end for |
| 25 | return the equivalent charges on two auxiliary surfaces for each node |
3.4.2. Updating Expressions
3.5. Algorithm Complexity
3.5.1. Space Complexity
3.5.2. Time Complexity
4. Experiments, Results, and Discussion
4.1. Parameter Setting
4.2. Single Contaminant Patch Bulge Impact Analysis
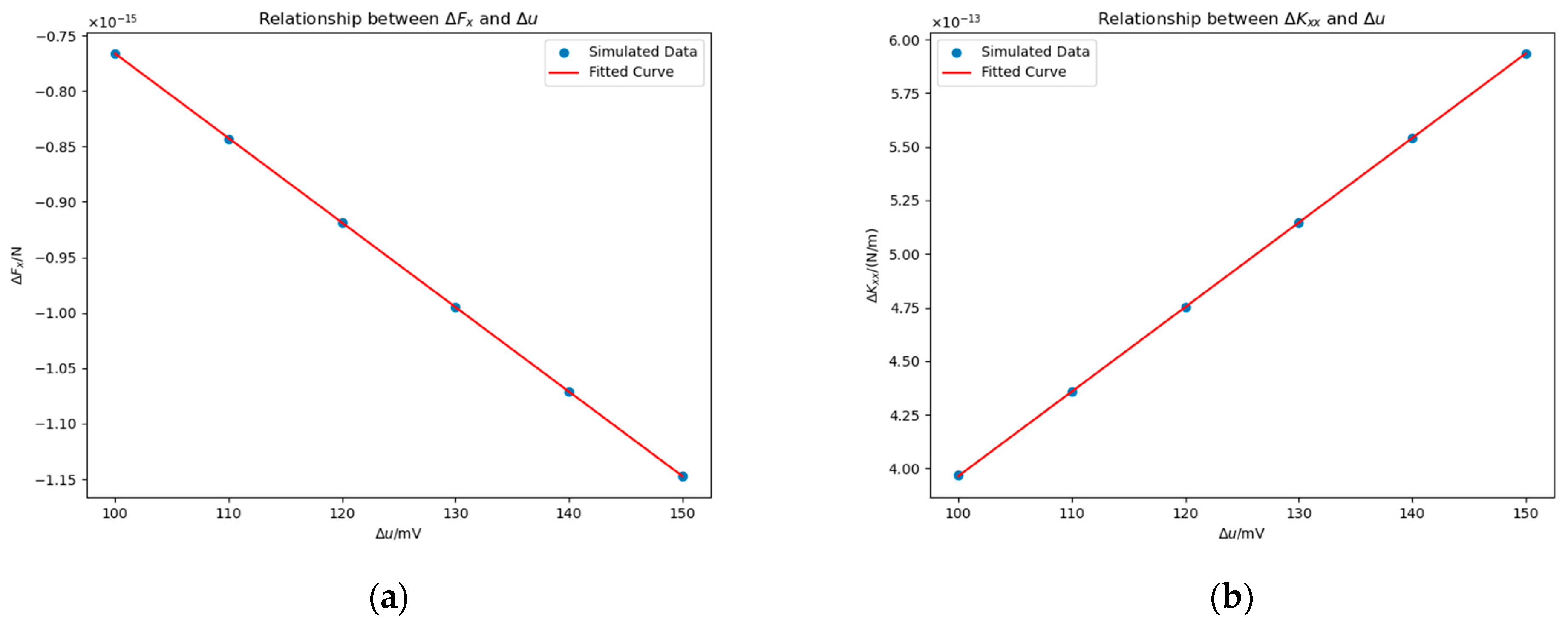
4.2.1. Impact of Potential
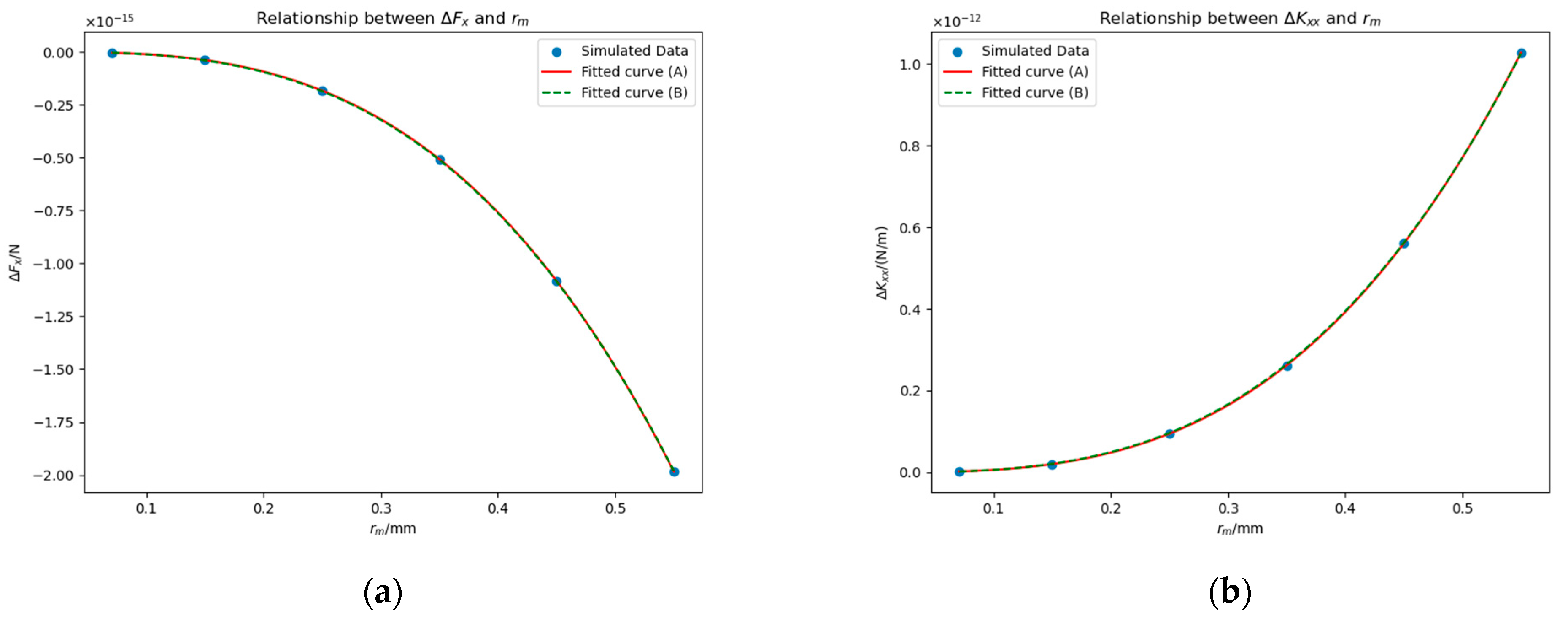
4.2.2. Impact of Base Radius
4.2.3. Impact of Location
4.3. Single Planar Patch Impact Analysis
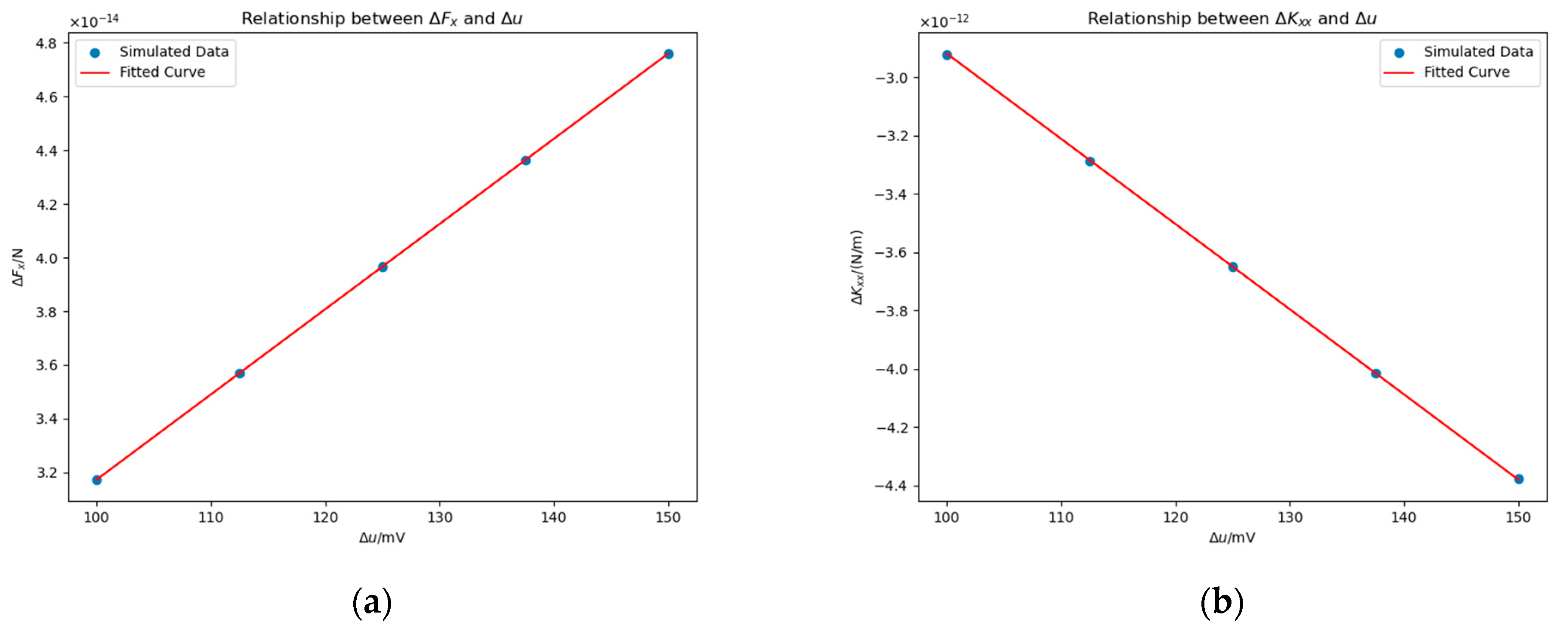
4.3.1. Impact of Potential
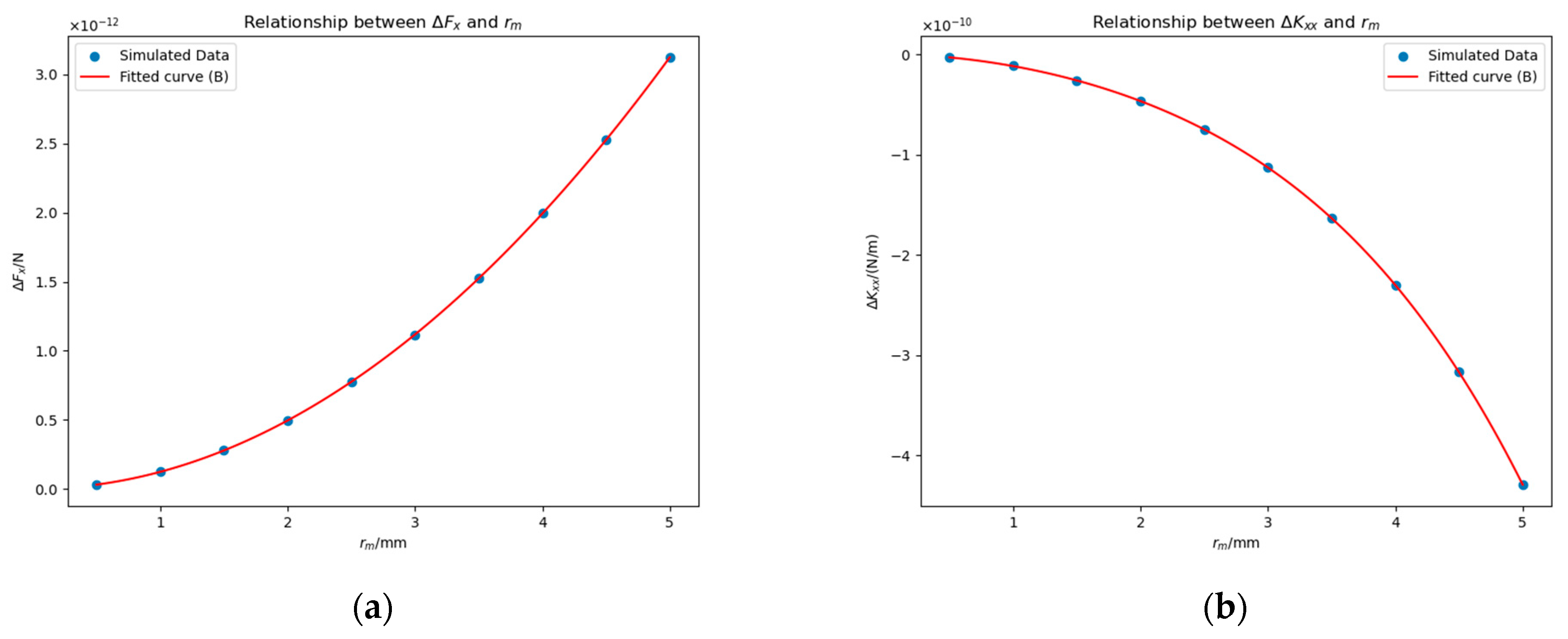
4.3.2. Impact of Patch Radius and Position
4.3.3. Explanation of the Curve of and
4.4. Analysis of the Metric Requirements in Space-Borne Gravitational Wave Detection Missions
4.4.1. Patch with Bulge
4.4.2. Single Planar Patch
5. Conclusions
- We established a mathematical model based on a partition of boundary elements and the GMRES method to simulate the patch field. This model can solve the charge distribution according to the potential distribution and use the charge distribution to calculate the force and stiffness on the TM. The bulges and the nonuniform distribution of the potential led by patches can also be simulated with the model.
- To overcome the difficulty of excessive computational complexity, based on existing algorithms, we made improvements according to needs, and designed an algorithm with spatiotemporal complexity for calculating potential distribution, force, and stiffness.
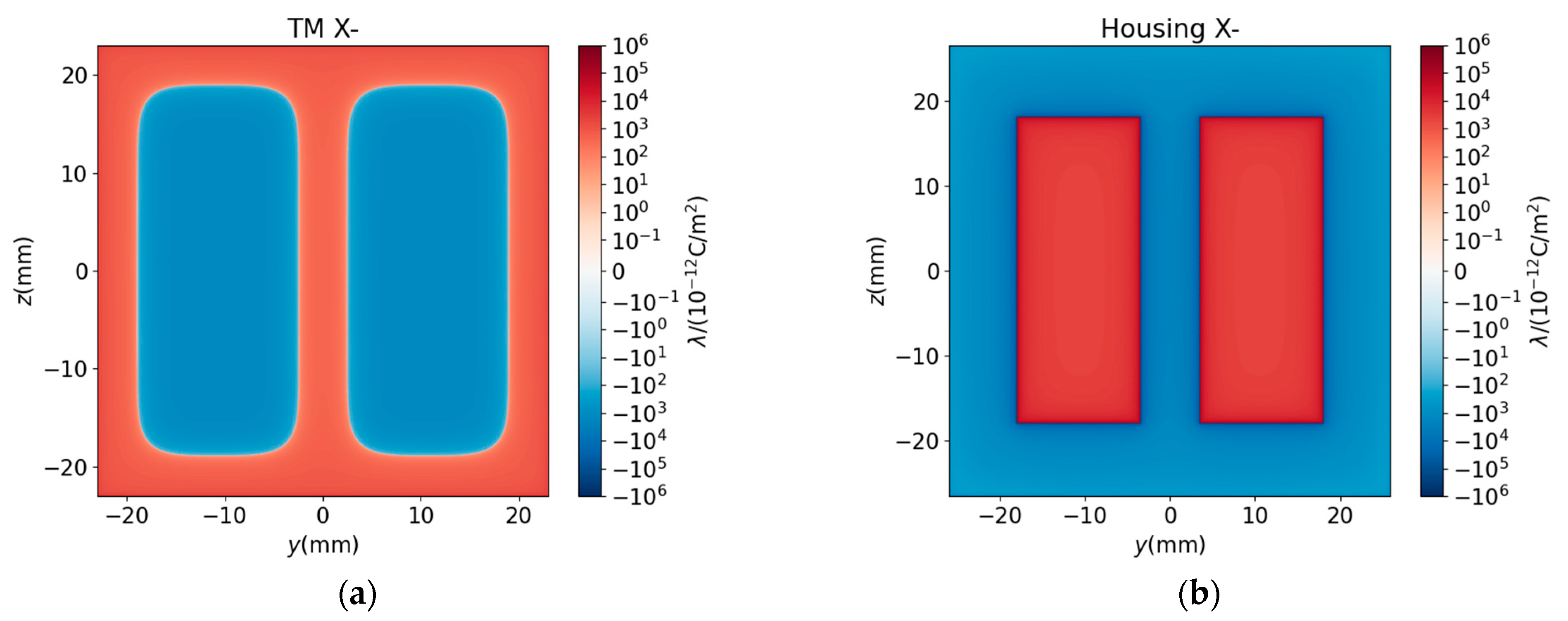
- With the method mentioned above, we researched what impacts single bulge forms from contaminant attachment have on force, , and stiffness, . The control variable method is adopted, and , , and location are taken as variables, respectively. The results show that both and are linear functions of , approximately proportional to to the third power. The patch which is opposite one electrode or is at one electrode has a bigger impact on than the patch in the other area. The patch at the surface of the housing has a bigger influence on than the patch at the surface of the TM.
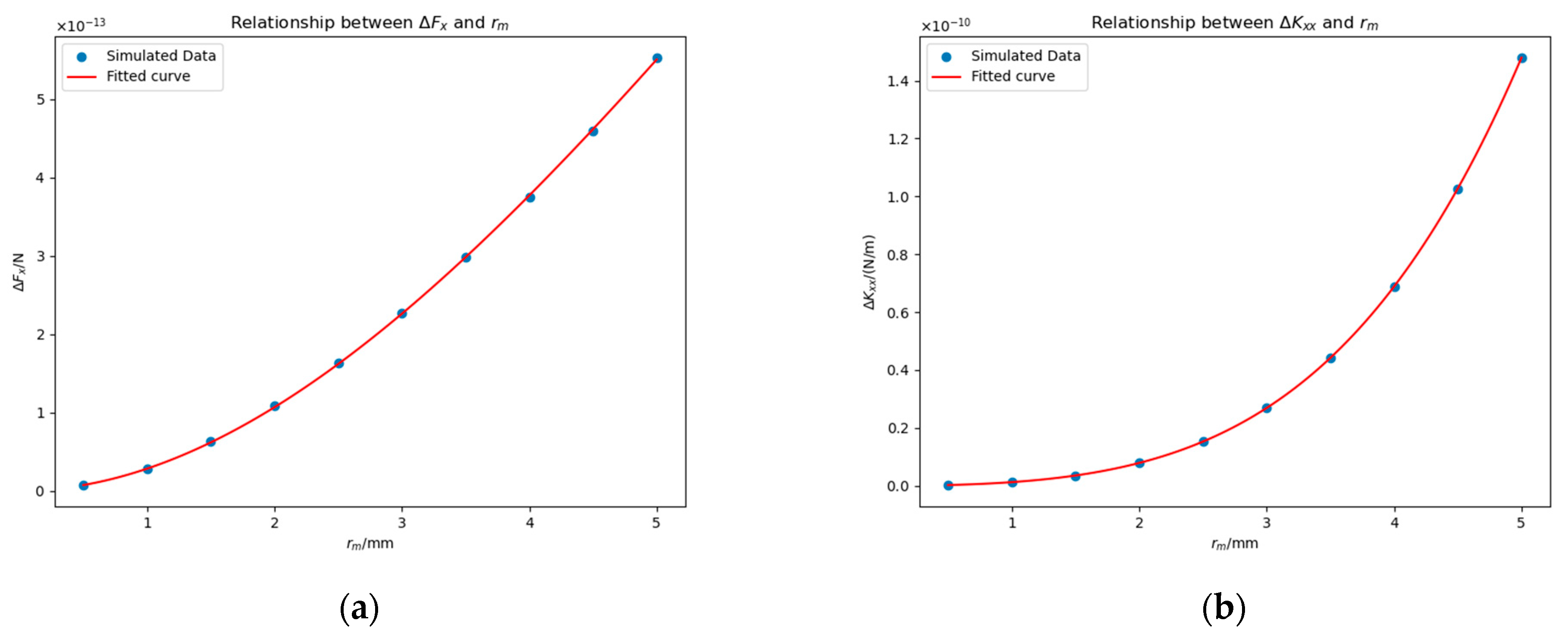
- In addition, we also studied a single patch without a bulge and found that the relation of and to can be approximated to a quartic curve passing through the origin, which can be simplified in some cases, and both and are approximately proportional to .
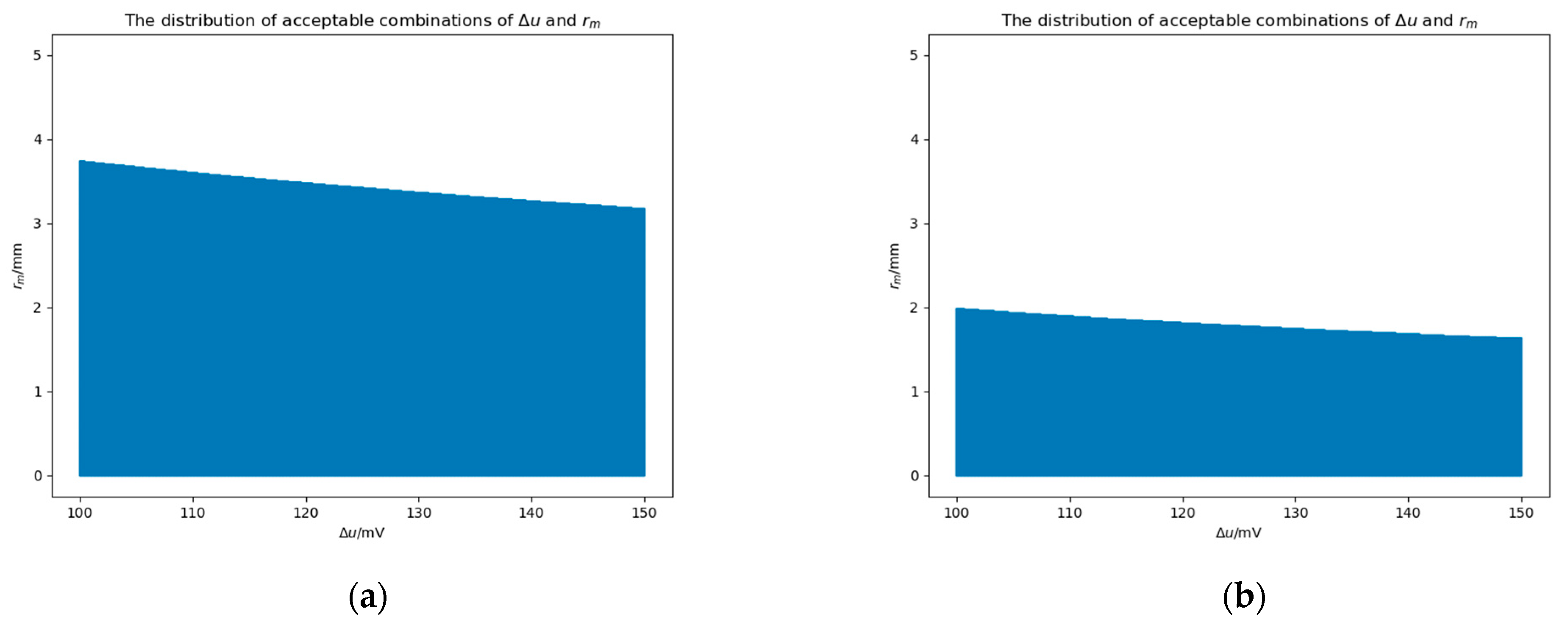
- With the help of Conclusion 3~4, we respectively studied the bulges and single planar patch for space-borne gravitational wave detection missions. If we limit the stiffness caused by the patch not to exceed , we found that, under normal circumstances, the impact of a bulge can be ignored. When , the value of of a single patch should be less than 1.62 mm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Verifying the Correctness of the Simulation Algorithm with a Parallel-Plate Capacitor

References
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Abernathy, M.R.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; et al. Observation of Gravitational Waves from a Binary Black Hole Merger. Phys. Rev. Lett. 2016, 116, 061102. [Google Scholar] [CrossRef]
- Lin, J.; Gao, Q.; Gong, Y.; Lu, Y.; Zhang, C.; Zhang, F. Primordial black holes and secondary gravitational waves from k and G inflation. Phys. Rev. D 2020, 101, 103515. [Google Scholar] [CrossRef]
- Lu, Y.; Gong, Y.; Yi, Z.; Zhang, F. Constraints on primordial curvature perturbations from primordial black hole dark matter and secondary gravitational waves. J. Cosmol. Astropart. Phys. 2019, 2019, 031. [Google Scholar] [CrossRef]
- Di, H.; Gong, Y. Primordial black holes and second order gravitational waves from ultra-slow-roll inflation. J. Cosmol. Astropart. Phys. 2018, 2018, 007. [Google Scholar] [CrossRef]
- Sesana, A. Prospects for multiband gravitational-wave astronomy after GW150914. Phys. Rev. Lett. 2016, 116, 231102. [Google Scholar] [CrossRef]
- Barack, L.; Cutler, C. Using LISA extreme-mass-ratio inspiral sources to test off- Kerr deviations in the geometry of massive black holes. Phys. Rev. D 2007, 75, 042003. [Google Scholar] [CrossRef]
- Danzmann, K.; LISA Study Team. LISA: An ESA cornerstone mission for a gravitational wave observatory. Class. Quantum Gravity 1997, 14, 1399–1404. [Google Scholar]
- Hu, W.R.; Wu, Y.L. The Taiji Program in Space for gravitational wave physics and the nature of gravity. Natl. Sci. Rev. 2017, 4, 685–686. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.; Duan, H.-Z.; Gong, Y.-G.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A space-borne gravitational wave detector. Class. Quantum Gravity 2016, 33, 035010. [Google Scholar] [CrossRef]
- Weber, W.J.; Bortoluzzi, D.; Cavalleri, A.; Carbone, L.; Da Lio, M.; Dolesi, R.; Fontana, G.; Hoyle, C.D.; Hueller, M.; Vitale, S. Position sensors for flight testing of LISA drag-free control. Proc. SPIE 2003, 4856, 31–42. [Google Scholar]
- Vitale, S.; Bender, P.; Brillet, A.; Buchman, S.; Cavalleri, A.; Cerdonio, M.; Cruise, M.; Cutler, C.; Danzmann, K.; Dolesi, R.; et al. LISA and its in-flight test precursor SMART-2. Nucl. Phys. B Proc. Suppl. 2002, 110, 209–216. [Google Scholar] [CrossRef]
- Schumaker, B.L. Disturbance reduction requirements for LISA. Class. Quantum Gravity 2003, 20, S239. [Google Scholar] [CrossRef]
- Ke, J.; Dong, W.C.; Huang, S.-H.; Tan, Y.-J.; Tan, W.-H.; Yang, S.-Q.; Shao, C.-G.; Luo, J. Electrostatic effect due to patch potentials between closely spaced surfaces. Phys. Rev. D 2023, 107, 065009. [Google Scholar] [CrossRef]
- Li, K.; Yin, H.; Song, C.; Hu, M.; Wang, S.; Luo, P.; Zhou, Z. Precision improvement of patch potential measurement in a scanning probe equipped torsion pendulum. Rev. Sci. Instrum. 2022, 93, 065110. [Google Scholar] [CrossRef]
- Robertson, N.A.; Blackwood, J.R.; Buchman, S.; Byer, R.L.; Camp, J.; Gill, D.; Hanson, J.; Williams, S.; Zhou, P. Kelvin probe measurements: Investigations of the patch effect with applications to ST-7 and LISA. Class. Quantum Gravity 2006, 23, 2665. [Google Scholar] [CrossRef]
- Gaillard, N.; Gros-Jean, M.; Mariolle, D.; Bertin, F.; Bsiesy, A. Method to assess the grain crystallographic orientation with a submicronic spatial resolution using Kelvin probe force microscope. Appl. Phys. Lett. 2006, 89, 154101. [Google Scholar] [CrossRef]
- Rossi, F.; Opat, G.I. Observations of the effects of adsorbates on patch potentials. J. Phys. D Appl. Phys. 1992, 25, 1349. [Google Scholar] [CrossRef]
- Herring, C.; Nichols, M.H. Thermionic emission. Rev. Mod. Phys. 1949, 21, 185. [Google Scholar] [CrossRef]
- Speake, C.C. Forces and force gradients due to patch fields and contact-potential differences. Class. Quantum Gravity 1996, 13, A291. [Google Scholar] [CrossRef]
- Speake, C.C.; Trenkel, C. Forces between Conducting Surfaces due to Spatial Variations of Surface Potential. Phys. Rev. Lett. 2003, 90, 160403. [Google Scholar] [CrossRef]
- Dubessy, R.; Coudreau, T.; Guidoni, L. Electric field noise above surfaces: A model for heating-rate scaling law in ion traps. Phys. Rev. A 2009, 80, 031402. [Google Scholar] [CrossRef]
- Behunin, R.O.; Intravaia, F.; Dalvit, D.A.R.; Neto, P.A.M.; Reynaud, S. Modeling electrostatic patch effects in Casimir force measurements. Phys. Rev. A 2012, 85, 012504. [Google Scholar] [CrossRef]
- Vitale, S.; Ferroni, V.; Sala, L.; Weber, W.J. Estimate of force noise from electrostatic patch potentials in LISA Pathfinder. Class. Quantum Gravity 2024, 41, 195009. [Google Scholar] [CrossRef]
- Zhang, W.; Lei, J.; Wang, Z.; Li, C.; Yang, S.; Min, J.; Wen, X. Finite Element Analysis of Electrostatic Coupling in LISA Pathfinder Inertial Sensors. Sensors 2024, 24, 6189. [Google Scholar] [CrossRef]
- Weber, W.; Carbone, L.; Cavalleri, A.; Dolesi, R.; Hoyle, C.; Hueller, M.; Vitale, S. Possibilities for measurement and compensation of stray DC electric fields acting on drag-free test masses. Adv. Space Res. 2006, 39, 213–218. [Google Scholar] [CrossRef]
- Sumner, J.T.; Mueller, G.; Conklin, J.W.; Wass, P.J.; Hollington, D. Charge induced acceleration noise in the LISA gravitational reference sensor. Class. Quantum Gravity 2020, 37, 045010. [Google Scholar] [CrossRef]
- Ying, L.; Biros, G.; Zorin, D. A kernel-independent adaptive fast multipole algorithm in two and three dimensions. J. Comput. Phys. 2003, 196, 591–626. [Google Scholar] [CrossRef]
- Ying, L. A kernel independent fast multipole algorithm for radial basis functions. J. Comput. Phys. 2006, 213, 451–457. [Google Scholar] [CrossRef]
- William, F.; Eric, D. The black-box fast multipole method. J. Comput. Phys. 2009, 228, 8712–8725. [Google Scholar]
- Cao, Y.C.; Wen, L.H.; Rong, J. A SVD accelerated kernel independent fast multipole method and its application to BEM. WIT Trans. Model. Simul. 2013, 56, 431–443. [Google Scholar]
- Riley, K.F.; Hobson, M.P.; Bence, S.J. Mathematical Methodsfor Physics and Engineering, 3rd ed.; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Area | ID | Area |
|---|---|---|---|
| 1 | 5 | ||
| 2 | 6 | ||
| 3 | 7 | ||
| 4 | 8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
She, M.; Peng, X.; Qiang, L.-E. Simulation of Patch Field Effect in Space-Borne Gravitational Wave Detection Missions. Sensors 2025, 25, 3107. https://doi.org/10.3390/s25103107
She M, Peng X, Qiang L-E. Simulation of Patch Field Effect in Space-Borne Gravitational Wave Detection Missions. Sensors. 2025; 25(10):3107. https://doi.org/10.3390/s25103107
Chicago/Turabian StyleShe, Mingchao, Xiaodong Peng, and Li-E Qiang. 2025. "Simulation of Patch Field Effect in Space-Borne Gravitational Wave Detection Missions" Sensors 25, no. 10: 3107. https://doi.org/10.3390/s25103107
APA StyleShe, M., Peng, X., & Qiang, L.-E. (2025). Simulation of Patch Field Effect in Space-Borne Gravitational Wave Detection Missions. Sensors, 25(10), 3107. https://doi.org/10.3390/s25103107