
Leveraging Hybrid RF-VLP for High-Accuracy Indoor Localization with Sparse Anchors


Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
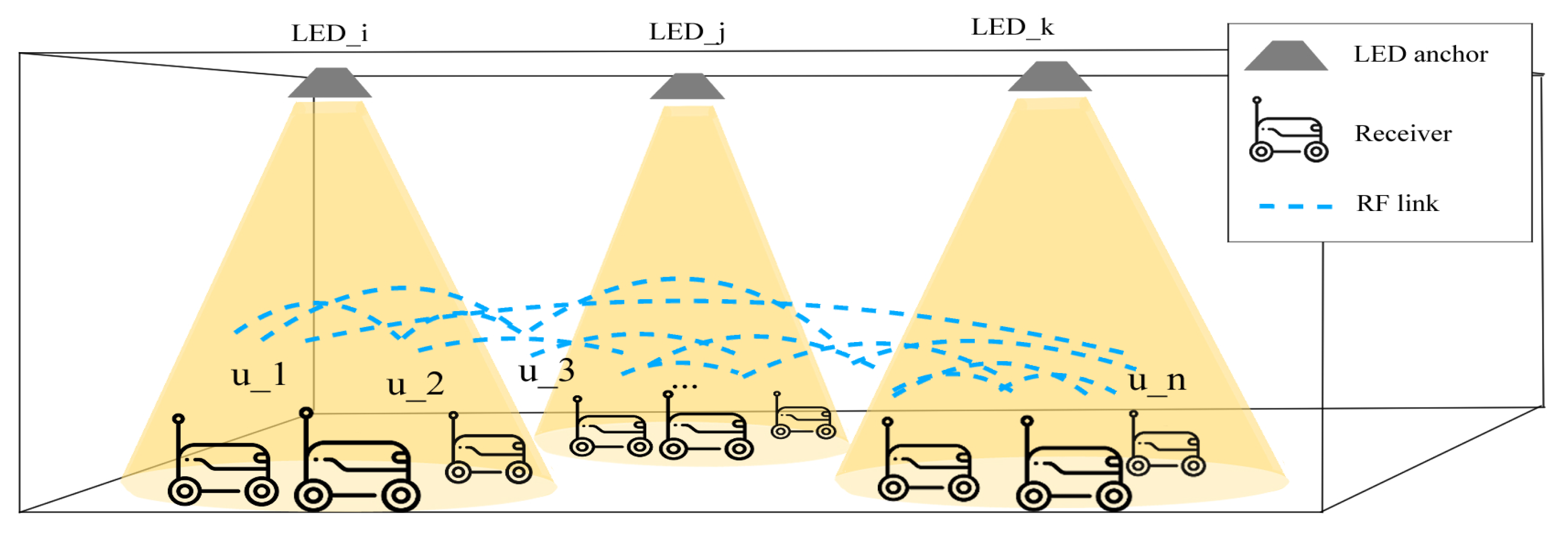
2. Hybrid RF-VLP-Enabled Positioning System
2.1. System Overview
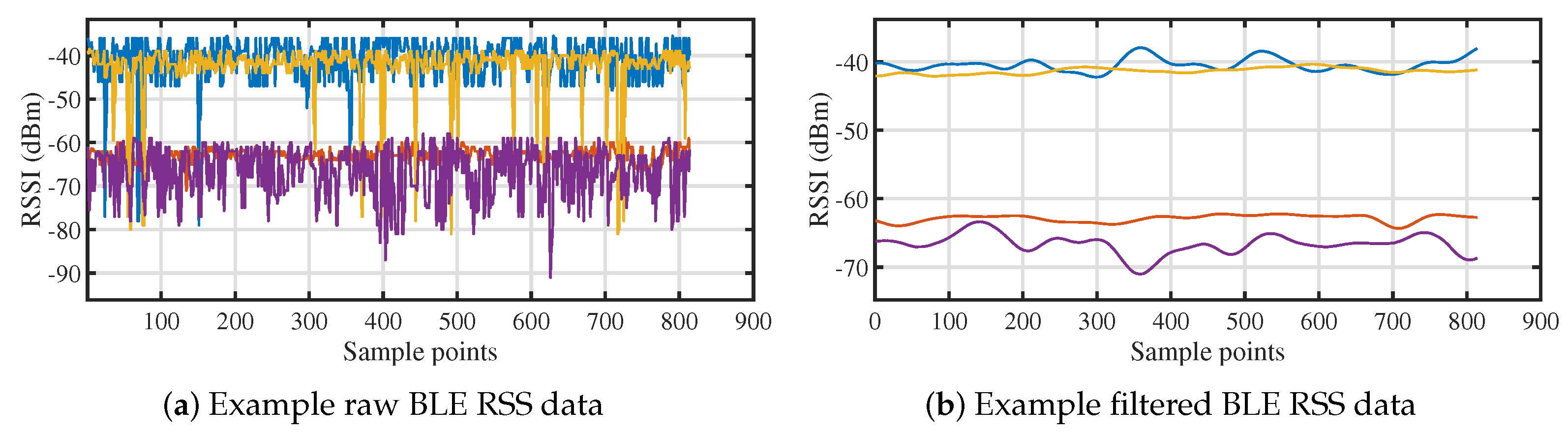
2.2. Integrated Localization Algorithm
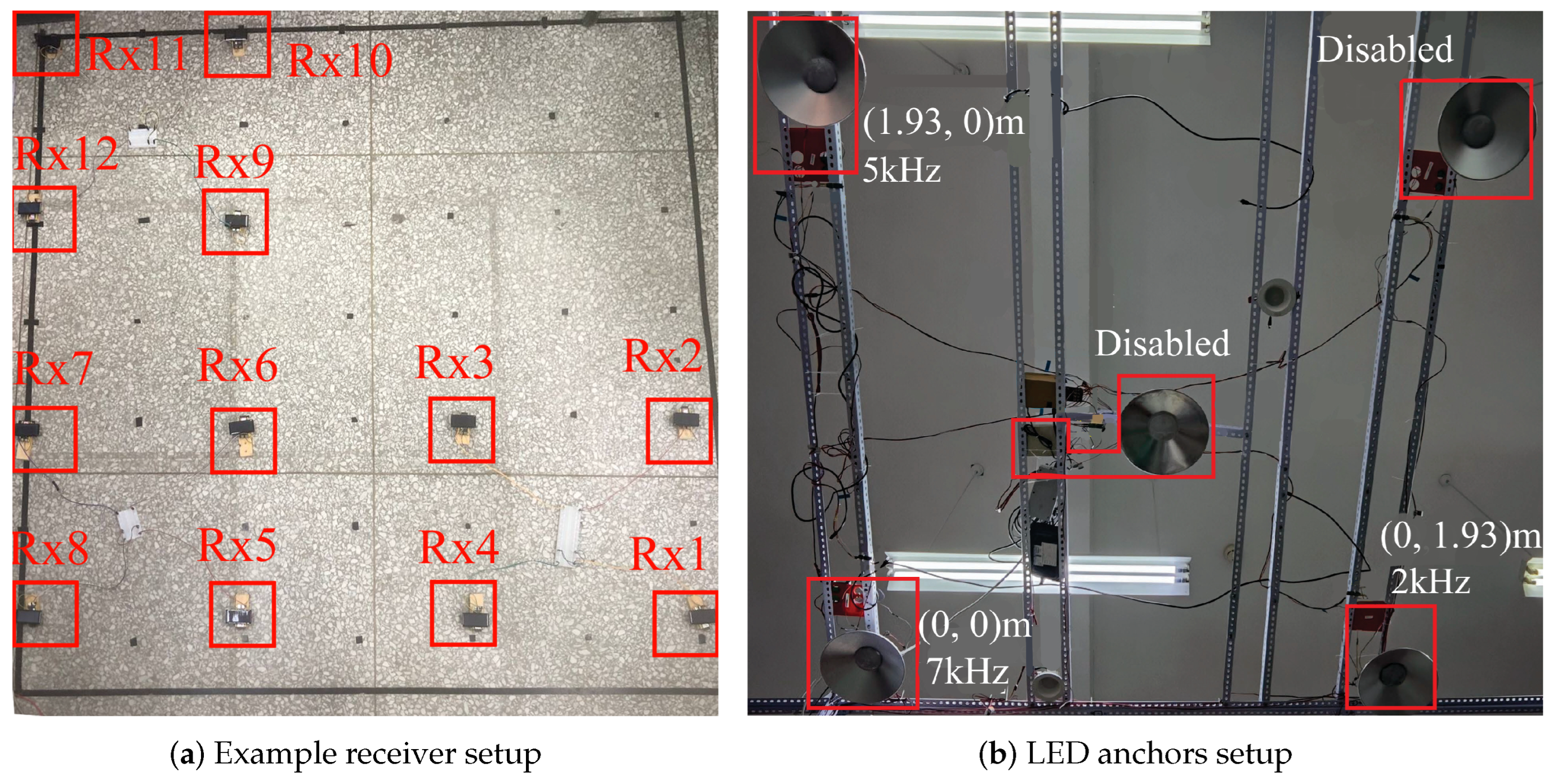
3. Prototype and Experimental Setup
4. Results and Discussions
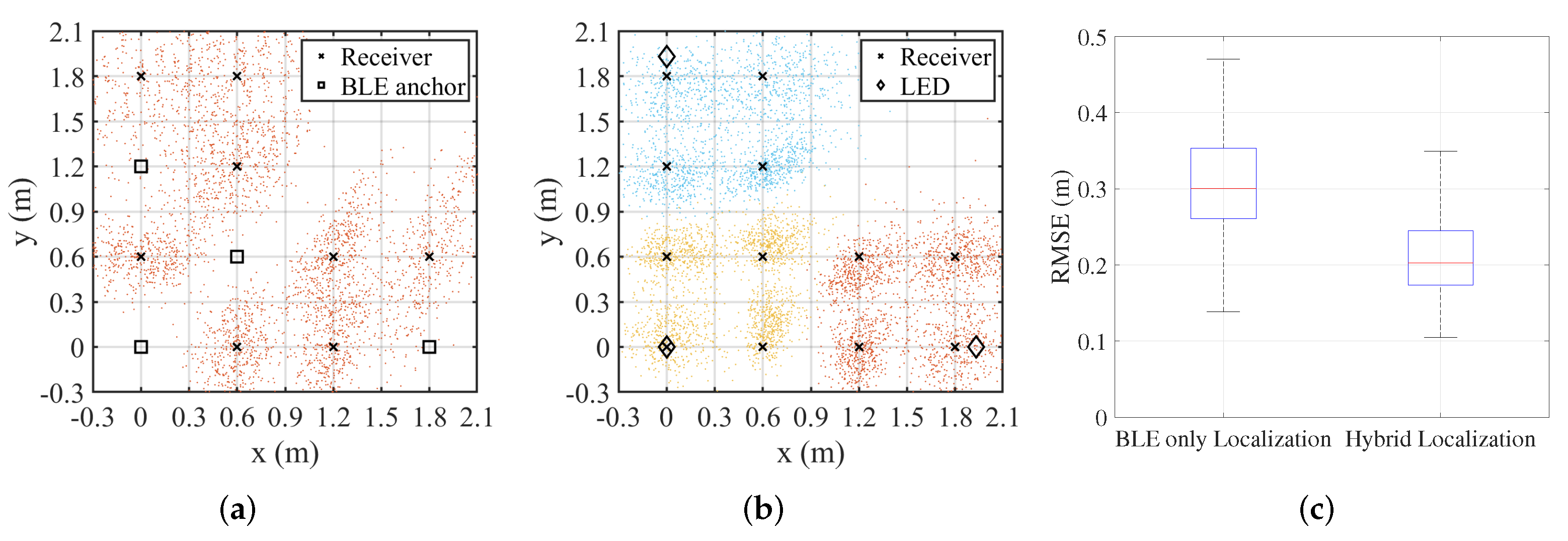
4.1. Comparison Among Different Positioning Systems
4.2. The Effect of BLE Transmission Power on Hybrid System Localization Accuracy
4.3. Impact of Receiver Arrangement on Localization Accuracy
4.4. Impact of Receiver Spacing on Localization Accuracy
4.5. Summary of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tran, H.Q.; Ha, C. Machine learning in indoor visible light positioning systems: A review. Neurocomputing 2022, 491, 117–131. [Google Scholar] [CrossRef]
- Sun, X.; Zhuang, Y.; Huai, J.; Hua, L.; Chen, D.; Li, Y.; Cao, Y.; Chen, R. RSS-Based Visible Light Positioning Using Nonlinear Optimization. IEEE Internet Things J. 2022, 9, 14137–14150. [Google Scholar] [CrossRef]
- Jiang, H.; Liu, W.; Jiang, G.; Jia, Y.; Liu, X.; Lui, Z.; Liao, X.; Xing, J.; Liu, D. Fly-Navi: A Novel Indoor Navigation System With On-the-Fly Map Generation. IEEE Trans. Mob. Comput. 2021, 20, 2820–2834. [Google Scholar] [CrossRef]
- Hong, C.Y.; Wu, Y.C.; Liu, Y.; Chow, C.W.; Yeh, C.H.; Hsu, K.L.; Lin, D.C.; Liao, X.L.; Lin, K.H.; Chen, Y.Y. Angle-of-Arrival (AOA) Visible Light Positioning (VLP) System Using Solar Cells With Third-Order Regression and Ridge Regression Algorithms. IEEE Photonics J. 2020, 12, 7902605. [Google Scholar] [CrossRef]
- Wang, K.; Liu, Y.; Hong, Z. RSS-based visible light positioning based on channel state information. Opt. Express 2022, 30, 5683–5699. [Google Scholar] [CrossRef] [PubMed]
- Lu, B.; Liang, S.; Sun, Y.; Chen, Q.; Yang, Y. A TDoA-based Single-LED VLP System Assisted by Circular Photodiodes Array Receiver. In Proceedings of the 2024 12th International Conference on Intelligent Computing and Wireless Optical Communications (ICWOC), Chongqing, China, 21–23 June 2024; pp. 23–28. [Google Scholar] [CrossRef]
- Xu, Y.; Hu, X.; Sun, Y.; Yang, Y.; Zhang, L.; Deng, X.; Chen, L. High-Accuracy Height-Independent 3D VLP Based on Received Signal Strength Ratio. Sensors 2022, 22, 7165. [Google Scholar] [CrossRef]
- Fite, N.B.; Wegari, G.M.; Steendam, H. Integration of Artificial Neural Network Regression and Principal Component Analysis for Indoor Visible Light Positioning. Sensors 2025, 25, 1049. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A Survey on Indoor Positioning Systems for IoT-Based Applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Huang, T.; Lin, B.; Ghassemlooy, Z.; Jiang, N.; Lai, Q. Indoor 3D NLOS VLP using a binocular camera and a single LED. Opt. Express 2022, 30, 35431–35443. [Google Scholar] [CrossRef]
- Du, X.; Zhang, Y.; Wang, C.; Li, D.; Zhu, Y. Visible light sensing based on shadow features using multi-scale region convolutional neural network. Opt. Express 2023, 31, 43323–43341. [Google Scholar] [CrossRef]
- Cappelli, I.; Carli, F.; Fort, A.; Micheletti, F.; Vignoli, V.; Bruzzi, M. Self-Sufficient Sensor Node Embedding 2D Visible Light Positioning through a Solar Cell Module. Sensors 2022, 22, 5869. [Google Scholar] [CrossRef]
- Liang, Z.; Lu, H.; Chen, D.; Wang, Q.; Kong, H.; Liu, X.; Jin, J.; Chen, H.; Wang, J. Optimal design of integrated visible light communication and positioning system with energy harvesting. Appl. Opt. 2023, 62, 7985–7993. [Google Scholar] [CrossRef] [PubMed]
- Wang, K.; Song, T.; Kandeepan, S.; Li, H.; Alameh, K. Indoor optical wireless communication system with continuous and simultaneous positioning. Opt. Express 2021, 29, 4582–4595. [Google Scholar] [CrossRef]
- Lin, P.; Hu, X.; Ruan, Y.; Li, H.; Fang, J.; Zhong, Y.; Zheng, H.; Fang, J.; Jiang, Z.L.; Chen, Z. Real-time visible light positioning supporting fast moving speed. Opt. Express 2020, 28, 14503–14510. [Google Scholar] [CrossRef]
- Du, P.; Zhang, S.; Chen, C.; Yang, H.; Zhong, W.D.; Zhang, R.; Alphones, A.; Yang, Y. Experimental Demonstration of 3D Visible Light Positioning Using Received Signal Strength With Low-Complexity Trilateration Assisted by Deep Learning Technique. IEEE Access 2019, 7, 93986–93997. [Google Scholar] [CrossRef]
- Lin, B.; Yang, J.; Nie, K.; Pan, Y.; Chao, J.; Luo, J.; Yu, H.; Huang, Y.; Yan, S.; Ghassemlooy, Z. NLOS visible light positioning and communication based on LoRa modulation. Opt. Express 2024, 32, 24128–24143. [Google Scholar] [CrossRef]
- Hua, L.; Zhuang, Y.; Li, Y.; Wang, Q.; Zhou, B.; Qi, L.; Yang, J.; Cao, Y.; Haas, H. FusionVLP: The Fusion of Photodiode and Camera for Visible Light Positioning. IEEE Trans. Veh. Technol. 2021, 70, 11796–11811. [Google Scholar] [CrossRef]
- Bai, L.; Yang, Y.; Chen, M.; Feng, C.; Guo, C.; Saad, W.; Cui, S. Computer Vision-Based Localization With Visible Light Communications. IEEE Trans. Wirel. Commun. 2022, 21, 2051–2065. [Google Scholar] [CrossRef]
- Cao, X.; Zhuang, Y.; Wang, X.; Yu, T.; Zhou, J.; Jiang, J. Deep Learning Enhanced Visible Light Positioning System Based on the LED Array. IEEE Internet Things J. 2024, 11, 21985–21995. [Google Scholar] [CrossRef]
- Chen, H.; Han, W.; Wang, J.; Lu, H.; Chen, D.; Jin, J.; Feng, L. High accuracy indoor visible light positioning using a long short term memory-fully connected network based algorithm. Opt. Express 2021, 29, 41109–41120. [Google Scholar] [CrossRef]
- Hsu, L.S.; Chow, C.W.; Liu, Y.; Chang, Y.H.; Tsai, T.T.; Hung, T.Y.; Lin, Y.Z.; Jian, Y.H.; Yeh, C.H. Utilizing single light-emitting-diode (LED) lamp and silicon solar-cells visible light positioning (VLP) based on angle-of-arrival (AOA) and long-short-term-memory-neural-network (LSTMNN). Opt. Commun. 2022, 524, 128761. [Google Scholar] [CrossRef]
- Albraheem, L.; Alawad, S. A Hybrid Indoor Positioning System Based on Visible Light Communication and Bluetooth RSS Trilateration. Sensors 2023, 23, 7199. [Google Scholar] [CrossRef] [PubMed]
- Singh, J.; Farnham, T.; Wang, Q. When BLE Meets Light: Multi-modal Fusion for Enhanced Indoor Localization. In Proceedings of the 29th Annual International Conference on Mobile Computing and Networking, Tampa, FL, USA, 16–18 November 2004; Association for Computing Machinery: New York, NY, USA, 2023. [Google Scholar]
- Li, Z.; Zhao, X.; Zhao, Z.; Braun, T. CrowdFusion: Multisignal Fusion SLAM Positioning Leveraging Visible Light. IEEE Internet Things J. 2023, 10, 13065–13076. [Google Scholar] [CrossRef]
- Jornet, J.M.; Knightly, E.W.; Mittleman, D.M. Wireless communications sensing and security above 100 GHz. Nat. Commun. 2023, 14, 841. [Google Scholar] [CrossRef] [PubMed]
- Vegni, A.M.; Biagi, M. Threefold layered optical wireless network: Illumination, communication, and positioning. Opt. Express 2023, 31, 19189–19214. [Google Scholar] [CrossRef]
- Wei, H.W.; Lu, P. On Optimality of Weighted Multidimensional Scaling for Range-Based Localization. IEEE Trans. Signal Process. 2020, 68, 2105–2113. [Google Scholar] [CrossRef]
- Dudek, G.; Jenkin, M. Computational Principles of Mobile Robotics; Cambridge University Press: Cambridge, UK, 2024. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, B.; Li, Y.; Sun, Y.; Yang, Y. Leveraging Hybrid RF-VLP for High-Accuracy Indoor Localization with Sparse Anchors. Sensors 2025, 25, 3074. https://doi.org/10.3390/s25103074
Lu B, Li Y, Sun Y, Yang Y. Leveraging Hybrid RF-VLP for High-Accuracy Indoor Localization with Sparse Anchors. Sensors. 2025; 25(10):3074. https://doi.org/10.3390/s25103074
Chicago/Turabian StyleLu, Bangyan, Yongyun Li, Yimao Sun, and Yanbing Yang. 2025. "Leveraging Hybrid RF-VLP for High-Accuracy Indoor Localization with Sparse Anchors" Sensors 25, no. 10: 3074. https://doi.org/10.3390/s25103074
APA StyleLu, B., Li, Y., Sun, Y., & Yang, Y. (2025). Leveraging Hybrid RF-VLP for High-Accuracy Indoor Localization with Sparse Anchors. Sensors, 25(10), 3074. https://doi.org/10.3390/s25103074