


RFID Sensor with Integrated Energy Harvesting for Wireless Measurement of dc Magnetic Fields




Abstract
1. Introduction
2. RFID System Design
3. Antenna Design and Measurement
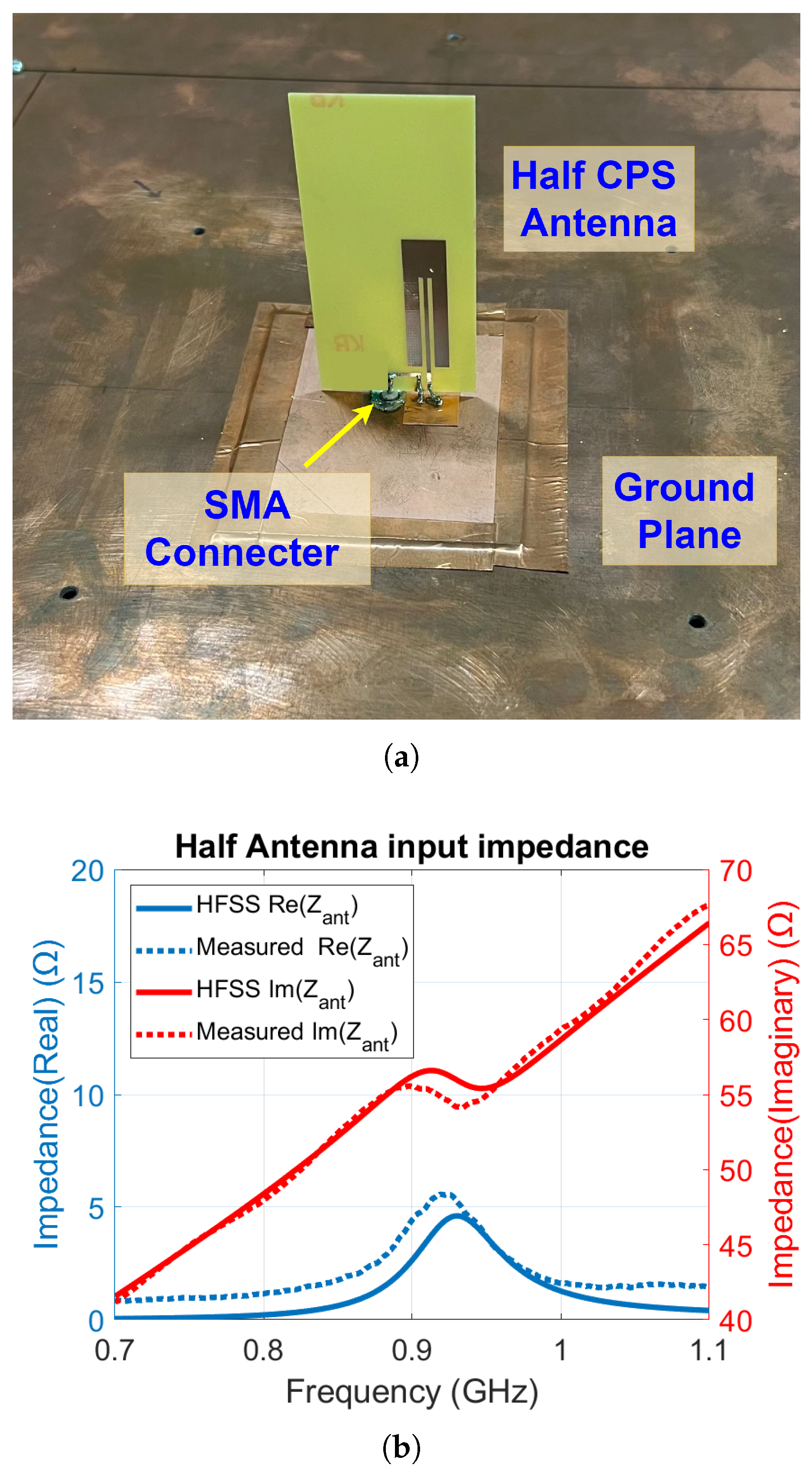
3.1. UHF RFID Tag Antenna
3.2. Power Harvester Antenna
4. Magnetic Field Measurement and Data Transmission
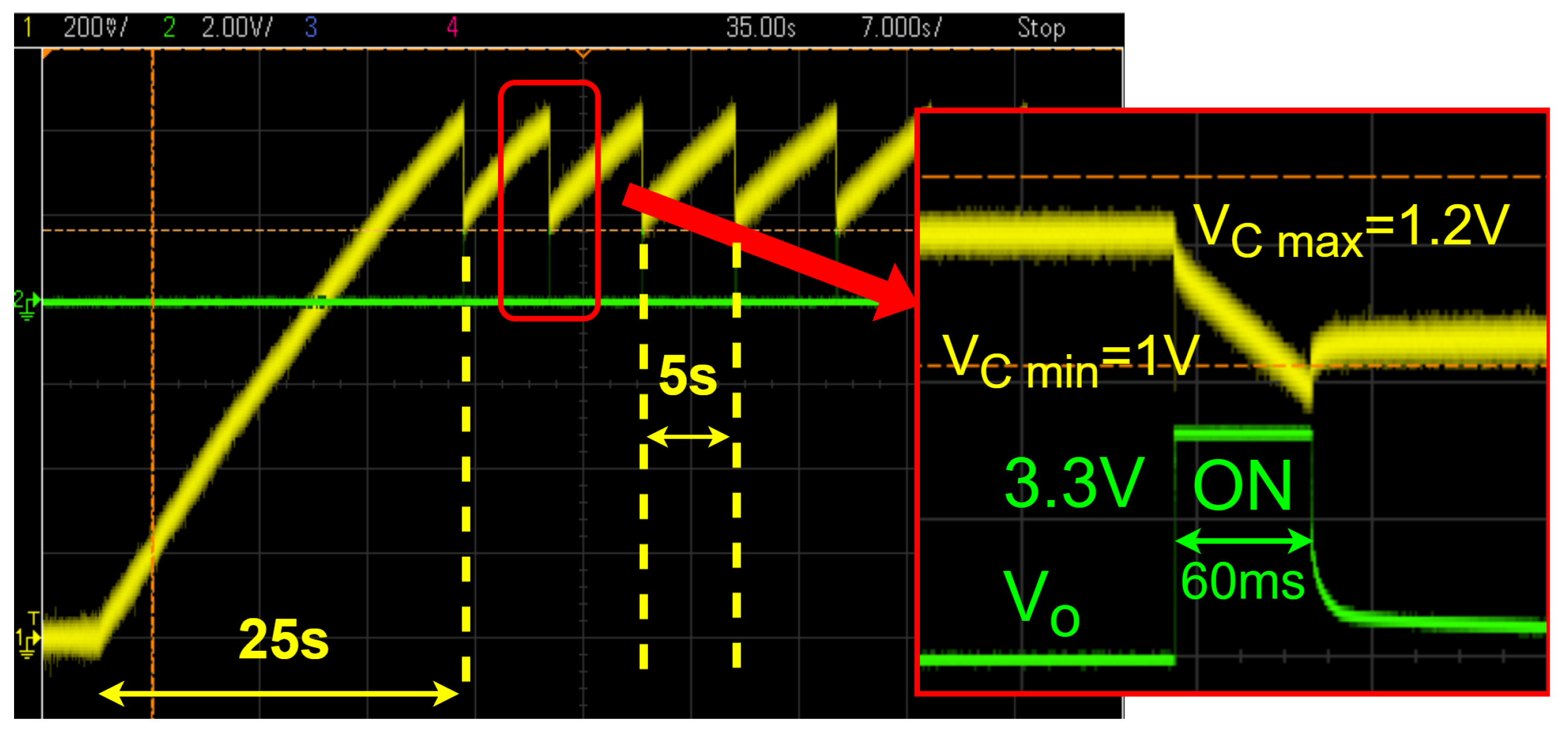
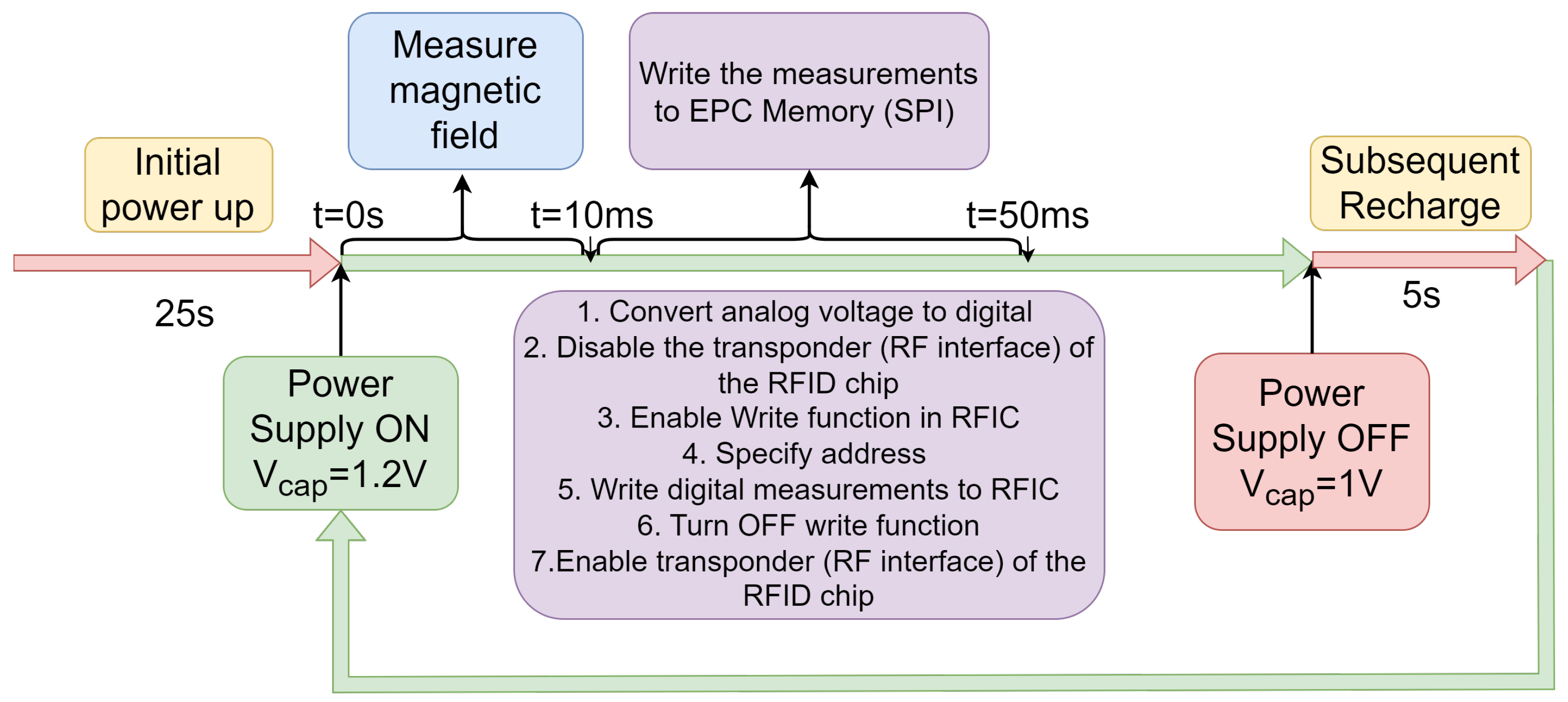
4.1. Power Management
4.2. Link Budget and Efficiency
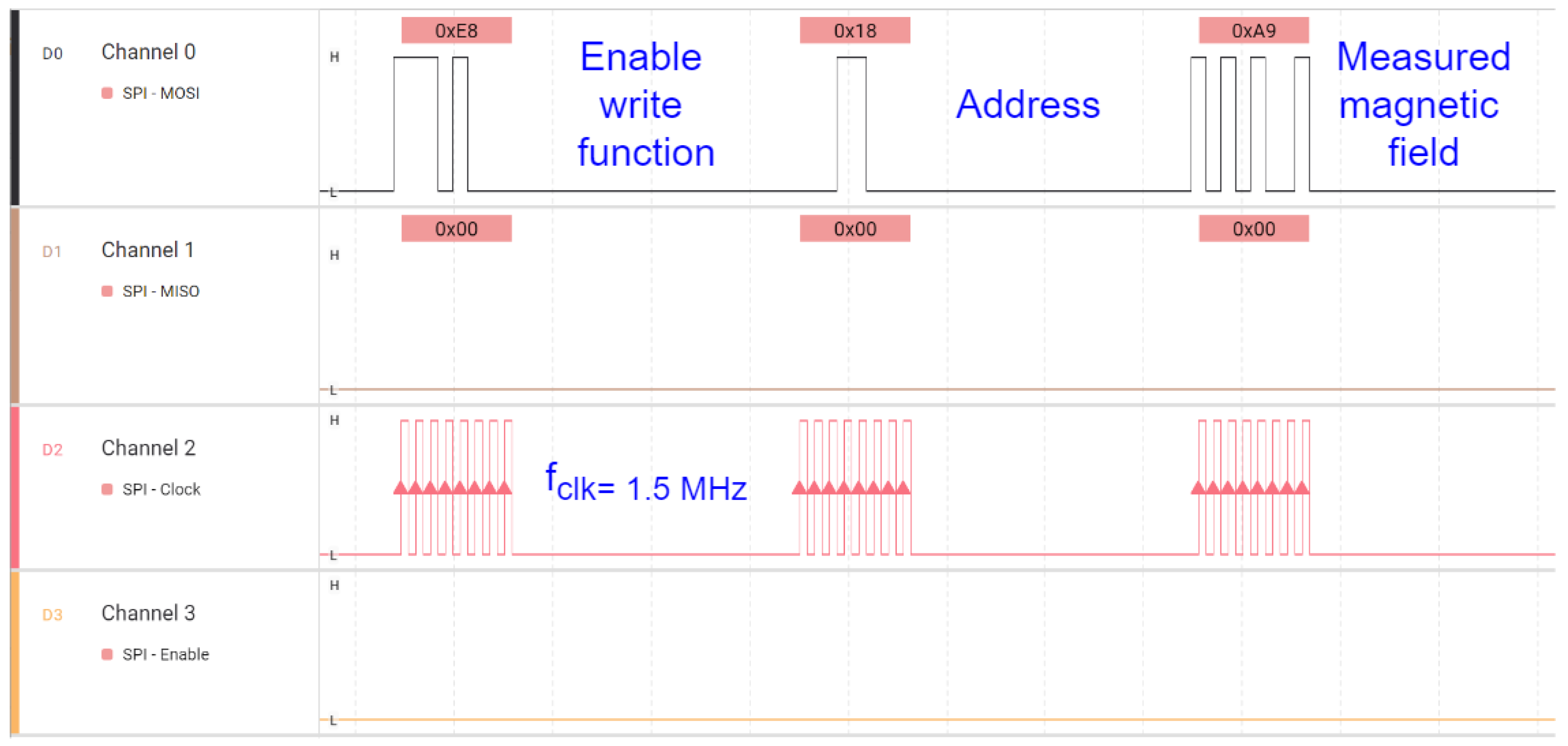
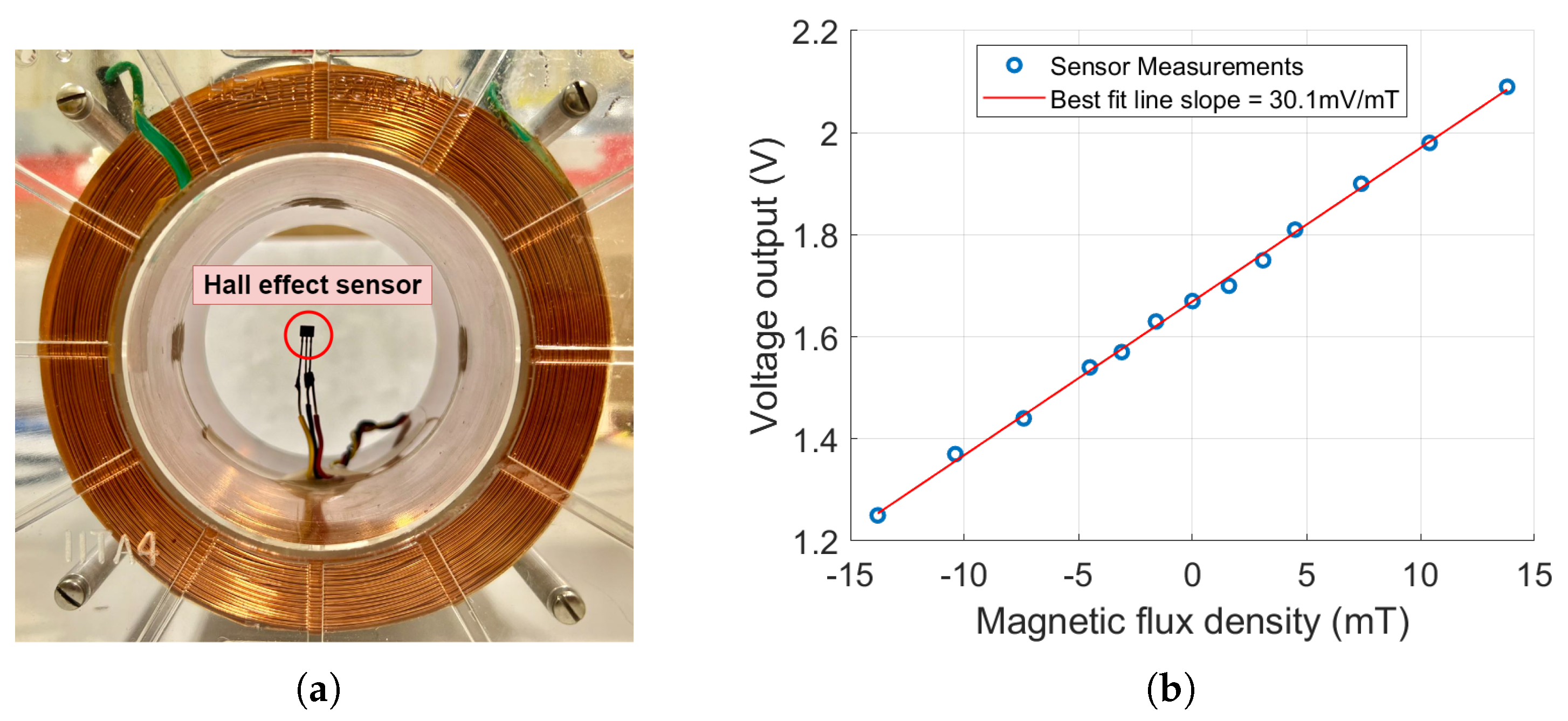
4.3. Hall Effect Sensor
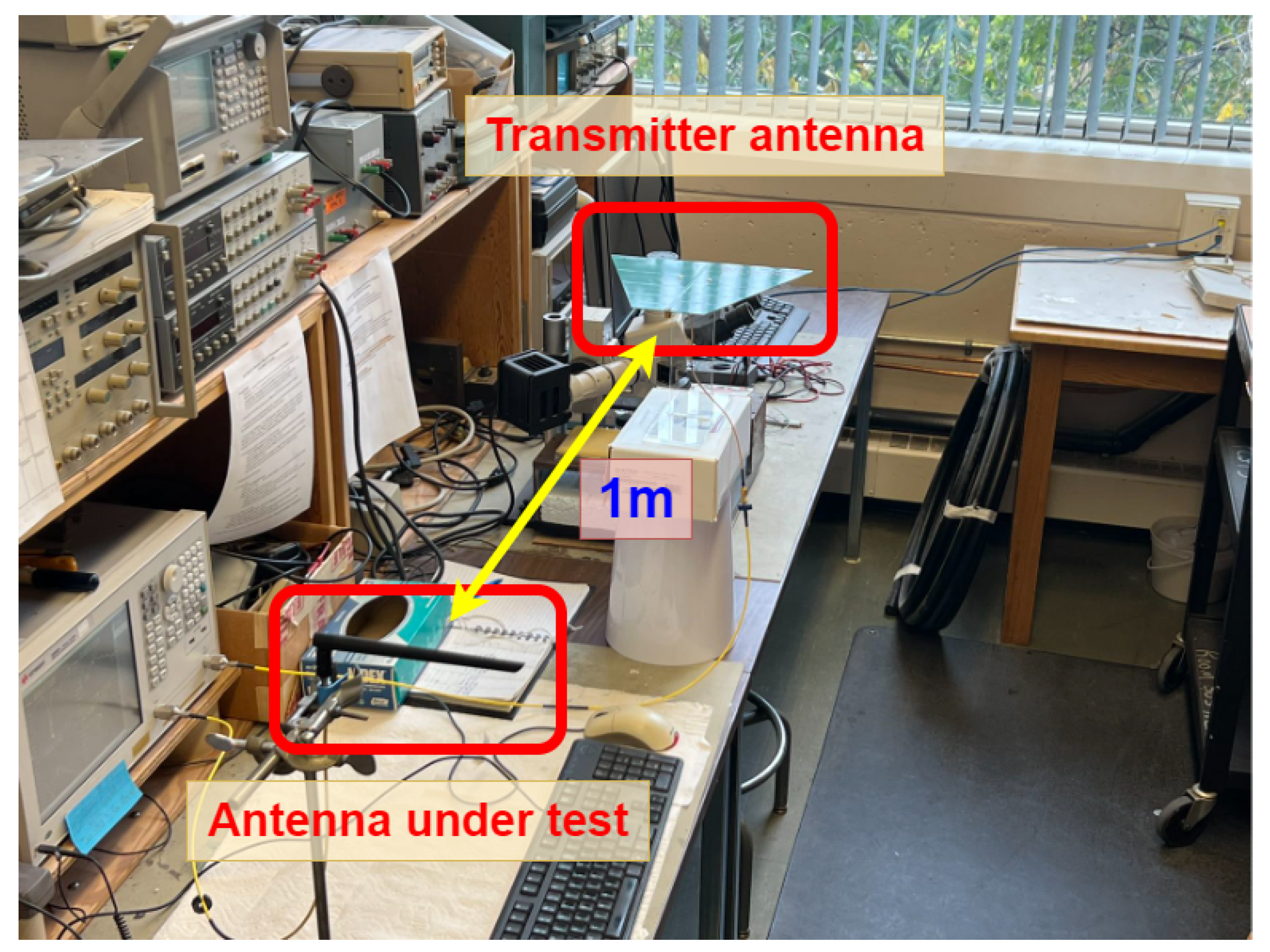
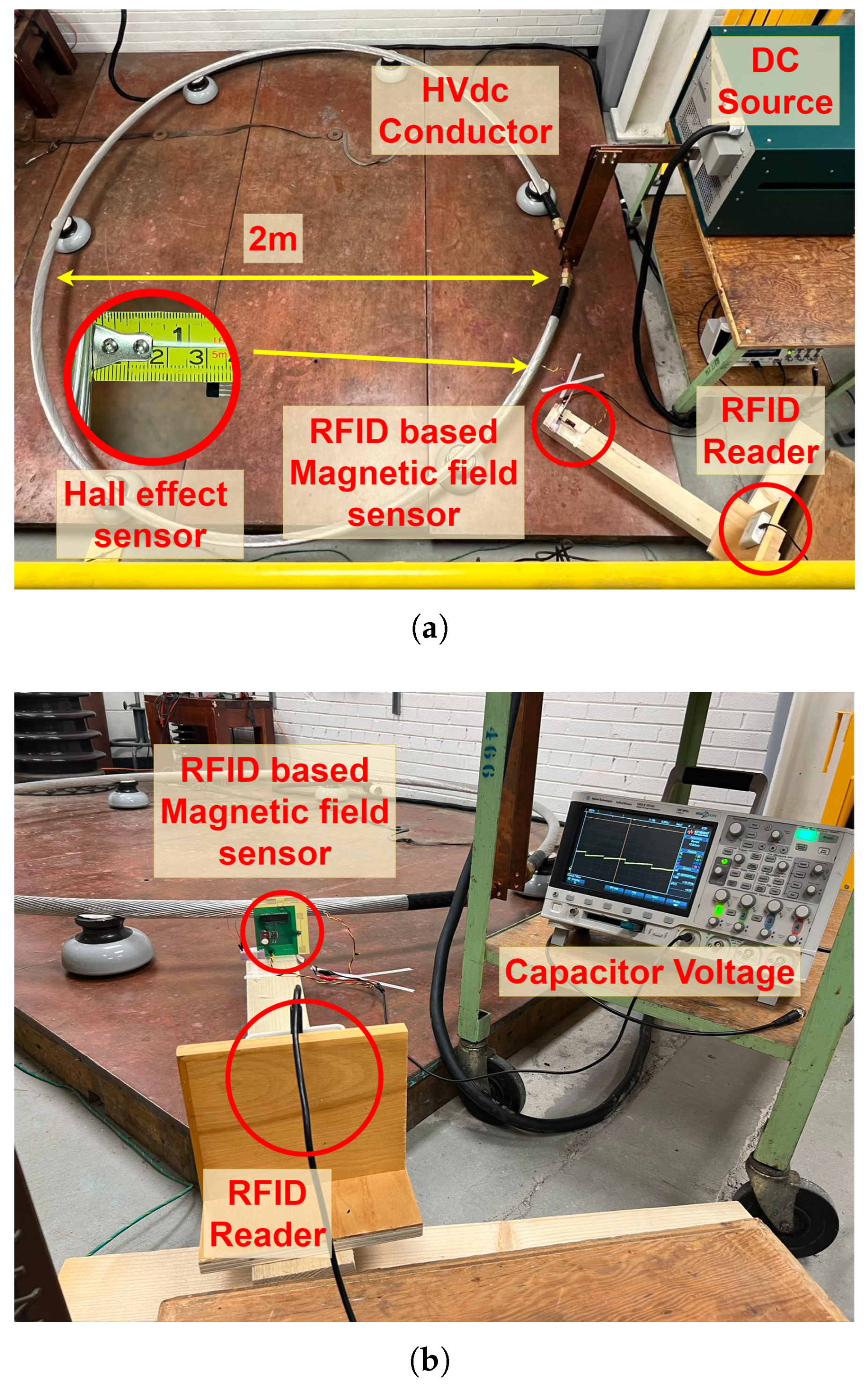
5. Experimental Setup for Testing of the RFID Magnetic Field Sensor
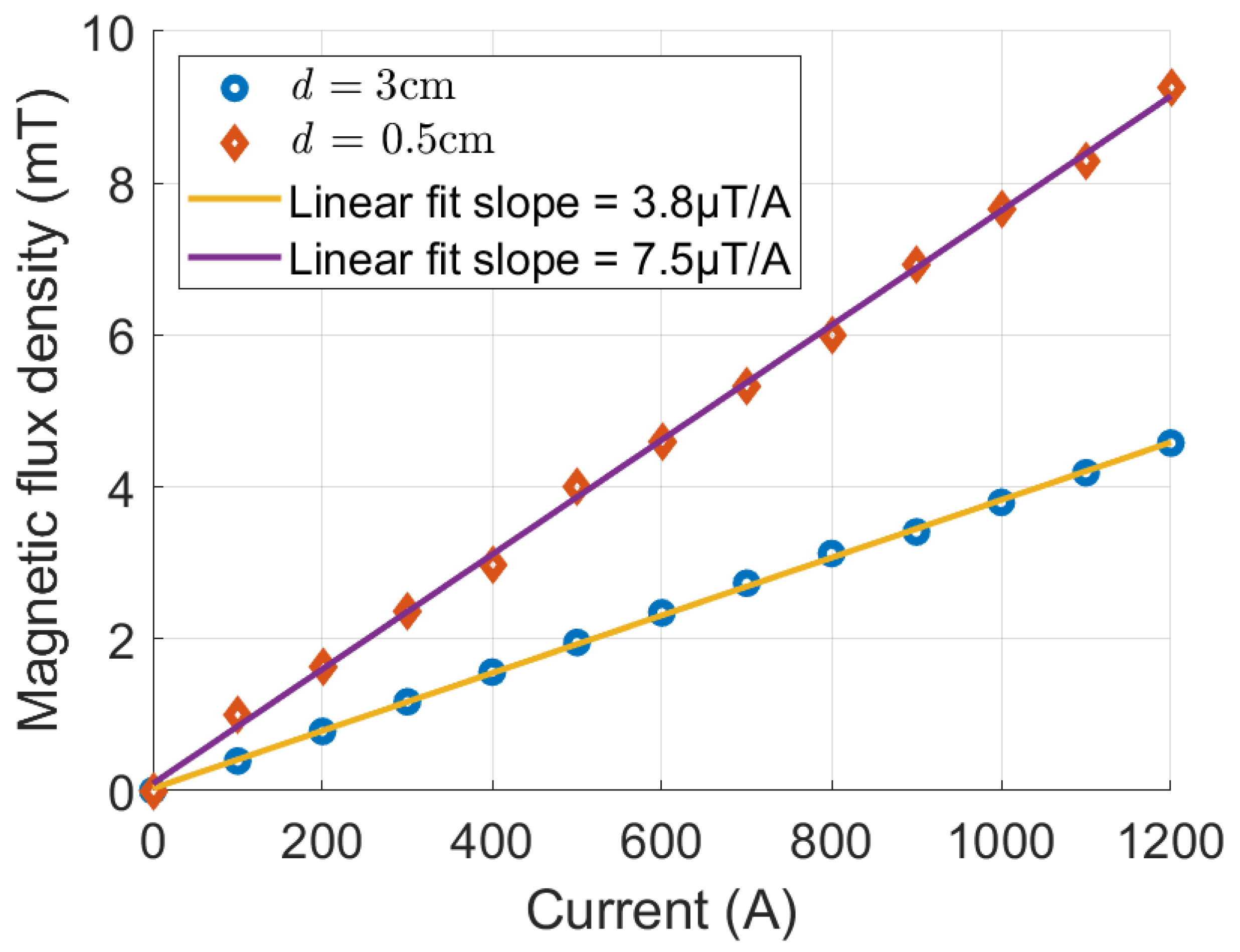
6. Results and Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Design of SPI Interface
References
- Khawaja, A.H.; Huang, Q.; Khan, Z.H. Monitoring of Overhead Transmission Lines: A Review from the Perspective of Contactless Technologies. Sens. Imaging 2017, 18, 1–18. [Google Scholar] [CrossRef]
- D’Antona, G.; Di Rienzo, L.; Ottoboni, R.; Manara, A. Processing magnetic sensor array data for AC current measurement in multiconductor systems. IEEE Trans. Instrum. Meas. 2001, 50, 1289–1295. [Google Scholar] [CrossRef]
- Zhang, Z.; Di Rienzo, L. Optimization of magnetic sensor arrays for current measurement based on swarm intelligence and D-optimality. Compel 2009, 28, 1179–1190. [Google Scholar] [CrossRef]
- Ripka, P. Electric current sensors: A review. Meas. Sci. Technol. 2010, 21, 112001. [Google Scholar] [CrossRef]
- Zhu, M.; Xu, K. A calibrating device for large direct current instruments up to 320 kiloampere-turns. IEEE Trans. Instrum. Meas. 1998, 47, 711–714. [Google Scholar] [CrossRef]
- Callegaro, L.; Cassiago, C.; Gasparotto, E. On the Calibration of Direct-Current Current Transformers (DCCT). IEEE Trans. Instrum. Meas. 2015, 64, 723–727. [Google Scholar] [CrossRef]
- Zhu, K.; Lee, W.K.; Pong, P.W.T. Non-contact electric-coupling-based and magnetic-field-sensing-assisted technique for monitoring voltage of overhead power transmission lines. In Proceedings of the 2015 IEEE SENSORS, Busan, Republic of Korea, 1–4 November 2015; pp. 1–4. [Google Scholar] [CrossRef]
- Sun, X.; Huang, Q.; Hou, Y.; Jiang, L.; Pong, P.W.T. Noncontact Operation-State Monitoring Technology Based on Magnetic-Field Sensing for Overhead High-Voltage Transmission Lines. IEEE Trans. Power Deliv. 2013, 28, 2145–2153. [Google Scholar] [CrossRef]
- Huang, Q.; Zhen, W.; Pong, P.W.T. A Novel Approach for Fault Location of Overhead Transmission Line With Noncontact Magnetic-Field Measurement. IEEE Trans. Power Deliv. 2012, 27, 1186–1195. [Google Scholar] [CrossRef]
- Rahmani, H.; Shetty, D.; Wagih, M.; Ghasempour, Y.; Palazzi, V.; Carvalho, N.B.; Correia, R.; Costanzo, A.; Vital, D.; Alimenti, F.; et al. Next-Generation IoT Devices: Sustainable Eco-Friendly Manufacturing, Energy Harvesting, and Wireless Connectivity. IEEE J. Microwaves 2023, 3, 237–255. [Google Scholar] [CrossRef]
- de Almeida, J.V.; Gu, X.; Wu, K. SWIPT Base Stations for Battery-Free, Wirelessly Powered IoT Networks: A Review on Architectures, Circuits and Technologies. IEEE Microw. Mag. 2024, 25, 22–40. [Google Scholar] [CrossRef]
- Colella, R.; Tarricone, L.; Catarinucci, L. SPARTACUS: Self-Powered Augmented RFID Tag for Autonomous Computing and Ubiquitous Sensing. IEEE Trans. Antennas Propag. 2015, 63, 2272–2281. [Google Scholar] [CrossRef]
- Wei, Z.; Zhou, Z.; Yu, S.; Chen, J. Enhanced Indoor Positioning Using RSSI and Time-Distributed Auto Encoder-Gated Recurrent Unit Model. Sensors 2024, 24, 4815. [Google Scholar] [CrossRef] [PubMed]
- Mulloni, V.; Marchi, G.; Gaiardo, A.; Valt, M.; Donelli, M.; Lorenzelli, L. Applications of Chipless RFID Humidity Sensors to Smart Packaging Solutions. Sensors 2024, 24, 2879. [Google Scholar] [CrossRef]
- Song, C.; Wu, Z. Artificial Intelligence-Assisted RFID Tag-Integrated Multi-Sensor for Quality Assessment and Sensing. Sensors 2024, 24, 1813. [Google Scholar] [CrossRef] [PubMed]
- Occhiuzzi, C.; D’Uva, N.; Nappi, S.; Amendola, S.; Giallucca, C.; Chiabrando, V.; Garavaglia, L.; Giacalone, G.; Marrocco, G. Radio-Frequency-Identification-Based Intelligent Packaging: Electromagnetic Classification of Tropical Fruit Ripening. IEEE Antennas Propag. Mag. 2020, 62, 64–75. [Google Scholar] [CrossRef]
- Alves, L.N.; da Costa, E.G.; Serres, A.J.; Xavier, G.V.; Oliveira Neto, A.B. Design and application of a UHF RFID tag for monitoring pollution in high voltage towers. Electr. Power Syst. Res. 2023, 224, 109775. [Google Scholar] [CrossRef]
- Wang, T.; He, Y.; Luo, Q.; Deng, F.; Zhang, C. Self-Powered RFID Sensor Tag for Fault Diagnosis and Prognosis of Transformer Winding. IEEE Sens. J. 2017, 17, 6418–6430. [Google Scholar] [CrossRef]
- Wang, J.; Zhu, M.; Zhu, W.; Gu, Z.; Wang, X.; Zhu, Q. The Self-powered RFID Sensor System for Power Transformer Condition Monitoring. In Proceedings of the 2021 IEEE 4th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 18–20 June 2021; Volume 4, pp. 613–617. [Google Scholar] [CrossRef]
- Yang, Z.; See, K.Y.; Karim, M.F.; Weerasinghe, A. Chipless RFID-Based Sensing System for Partial Discharge Detection and Identification. IEEE Sens. J. 2021, 21, 2277–2285. [Google Scholar] [CrossRef]
- Karmakar, N.C. Chipless RFID Sensor for High Voltage Condition Monitoring. In Advanced RFID Systems, Security, and Applications; IGI Global: Hershey, PA, USA, 2012; pp. 304–333. [Google Scholar]
- Amirkabiri, A.; Idoko, D.; Kordi, B.; Bridges, G.E. Chipless RFID Sensor for Measuring Time-Varying Electric Fields Using a Contactless Air-Filled Substrate-Integrated Waveguide Resonator. Sensors 2024, 24, 4928. [Google Scholar] [CrossRef]
- Ren, Z.; Wang, Y. Multi Parameter Integrated Measurement Method and Experimental Verification for Overhead Transmission Lines. In Proceedings of the 2024 8th International Conference on Green Energy and Applications (ICGEA), Singapore, 14–16 March 2024; pp. 17–22. [Google Scholar] [CrossRef]
- Huang, Q.; Yao, R.; Li, F.; Zhen, W. Design and implementation of a non-contact magnetic field measurement based fault location system for overhead transmission line. In Proceedings of the 2013 IEEE International Conference on Smart Instrumentation, Measurement and Applications (ICSIMA), Kuala Lumpur, Malaysia, 25–27 November 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Abasian, A.; Tabesh, A.; Nezhad, A.Z.; Rezaei-Hosseinabadi, N. Design Optimization of an Energy Harvesting Platform for Self-Powered Wireless Devices in Monitoring of AC Power Lines. IEEE Trans. Power Electron. 2018, 33, 10308–10316. [Google Scholar] [CrossRef]
- Deng, F.; Wen, K.; Xie, Z.; Liu, H.; Tong, J. External Breaking Vibration Identification Method of Transmission Line Tower Based on Solar-Powered RFID Sensor and CNN. Electronics 2020, 9, 519. [Google Scholar] [CrossRef]
- Yuan, S.; Wu, H.; An, Z.; Chen, Y.; Sun, A. Design of Power Transmission Line Condition Monitoring and Analysis System Based on Improved Particle Swarm Optimization. In Proceedings of the 2023 2nd International Conference on Artificial Intelligence and Autonomous Robot Systems (AIARS), Bristol, UK, 29–31 July 2023; pp. 67–71. [Google Scholar] [CrossRef]
- Fu, S.; Bridges, G.; Kordi, B. Magnetic Field Monitoring on HVdc Transmission Lines Using a UHF-RFID Tag. In Proceedings of the 2024 Photonics & Electromagnetics Research Symposium (PIERS), Chengdu, China, 21–25 April 2024; pp. 1–5. [Google Scholar] [CrossRef]
- EM Microelectronics. EM4325 18000-63 Type C (Gen2) and 18000-63 Type C/18000-64 Type D (Gen2/TOTAL) RFID IC, Version 9.2; EM Microelectronic-Marin SA: Marin-Epagnier, Switzerland, 2023.
- Popovic, N. UHF RFID Antenna: Printed Dipole Antenna with a CPS Matching Circuit and Inductively Coupled Feed. Int. J. Eng. Bus. Manag. 2012, 4, 20. [Google Scholar] [CrossRef]
- Powercast. P2110B 915 MHz RF Powerharvester Receiver; Powercast Corporation: Pittsburgh, PA, USA, 2016. [Google Scholar]
- Balanis, C.A. Antenna Theory: Analysis and Design, 4th ed.; New York Academy of Sciences, Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- Ramsden, E. Hall-Effect Physics. In Hall-Effect Sensors, 2nd ed.; Elsevier: New York, NY, USA, 2006; pp. 1–10. [Google Scholar]
- Texas Instruments. DRV5055 Ratiometric Linear Hall Effect Sensor; Texas Instruments Incorporated: Dallas, TX, USA, 2021. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Type of Line | Type of Sensor | Power Source | Ref. |
|---|---|---|---|---|
| Magnetic field | AC and DC | MEMS | Solar energy | [23] |
| Current and sag | AC | Hall effect sensor | Rogowski coil | [24] |
| Current | AC | Multiple sensor | Electromechanical harvester | [25] |
| Vibration | AC and DC | Accelerometer | Solar energy | [26] |
| Vibration | AC and DC | Accelerometer | Battery | [27] |
| Magnetic field | DC | Hall effect sensor | RFID reader | This work |
| Component | Supply Voltage | Required Power |
|---|---|---|
| Microcontroller | V | mW |
| Hall effect sensor | V | mW |
| RFID chip | V | mW |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, S.; Bridges, G.E.; Kordi, B. RFID Sensor with Integrated Energy Harvesting for Wireless Measurement of dc Magnetic Fields. Sensors 2025, 25, 3024. https://doi.org/10.3390/s25103024
Fu S, Bridges GE, Kordi B. RFID Sensor with Integrated Energy Harvesting for Wireless Measurement of dc Magnetic Fields. Sensors. 2025; 25(10):3024. https://doi.org/10.3390/s25103024
Chicago/Turabian StyleFu, Shijie, Greg E. Bridges, and Behzad Kordi. 2025. "RFID Sensor with Integrated Energy Harvesting for Wireless Measurement of dc Magnetic Fields" Sensors 25, no. 10: 3024. https://doi.org/10.3390/s25103024
APA StyleFu, S., Bridges, G. E., & Kordi, B. (2025). RFID Sensor with Integrated Energy Harvesting for Wireless Measurement of dc Magnetic Fields. Sensors, 25(10), 3024. https://doi.org/10.3390/s25103024