
Driving Intention Recognition of Electric Wheel Loader Based on Fuzzy Control
 ,
,
Abstract
1. Introduction
2. Driving Intention Division and Recognition Parameter Selection
2.1. Driving Intention Division
- (1)
- Accelerated intention
- (2)
- Deceleration and braking intention
2.2. Identification Parameter Selection
3. Driving Intention Recognition
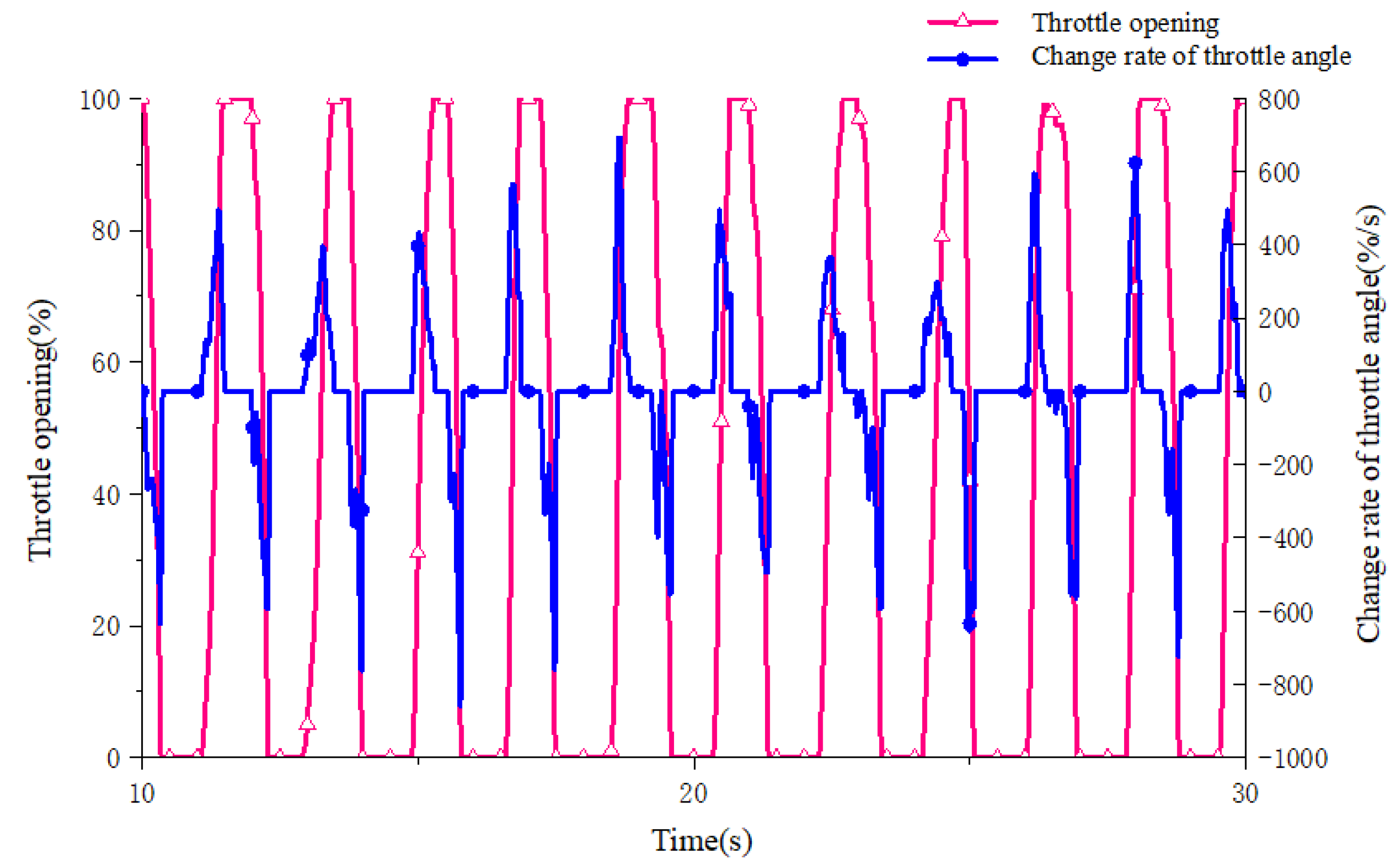
3.1. Throttle Pedal Data Acquisition
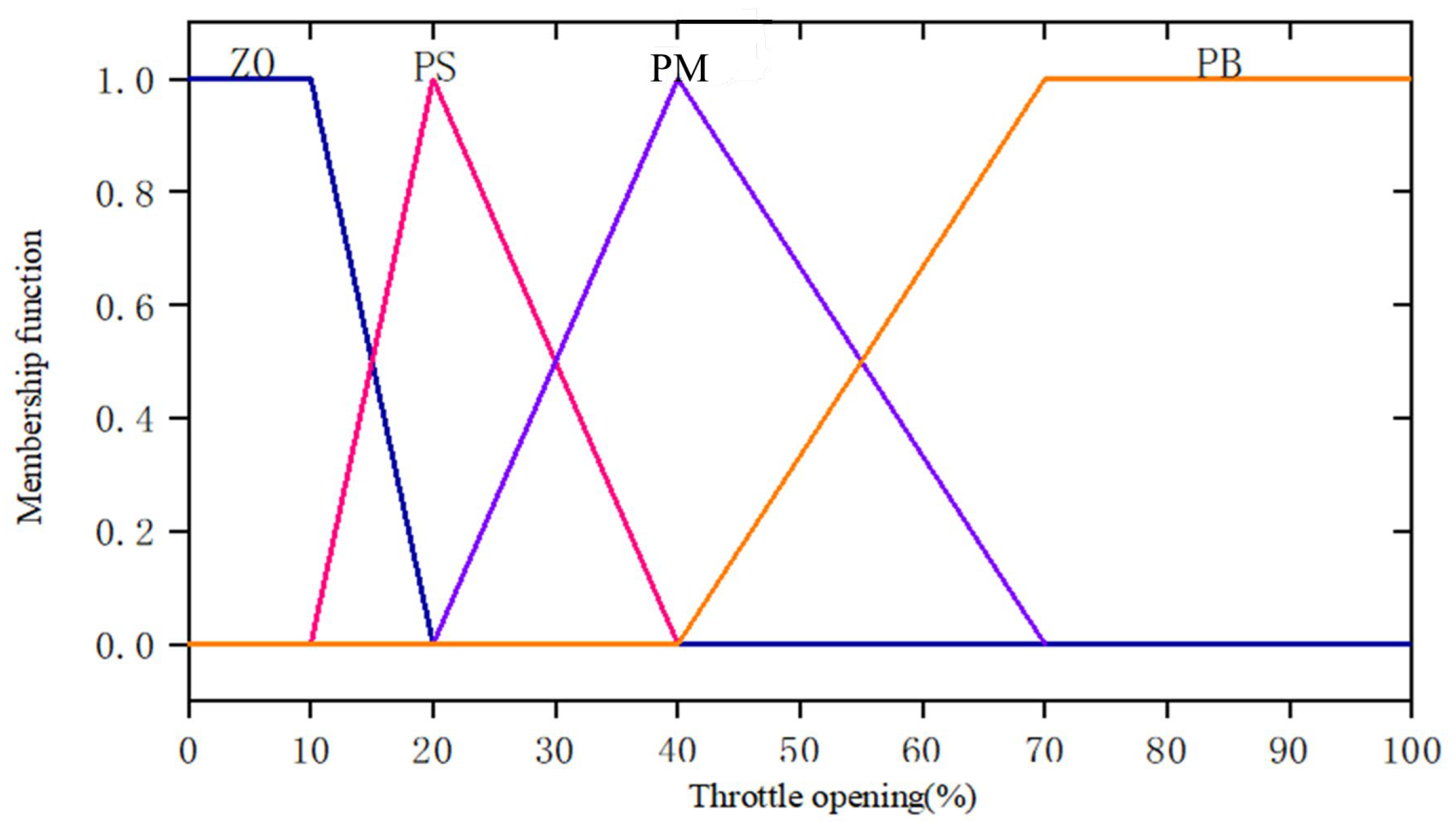
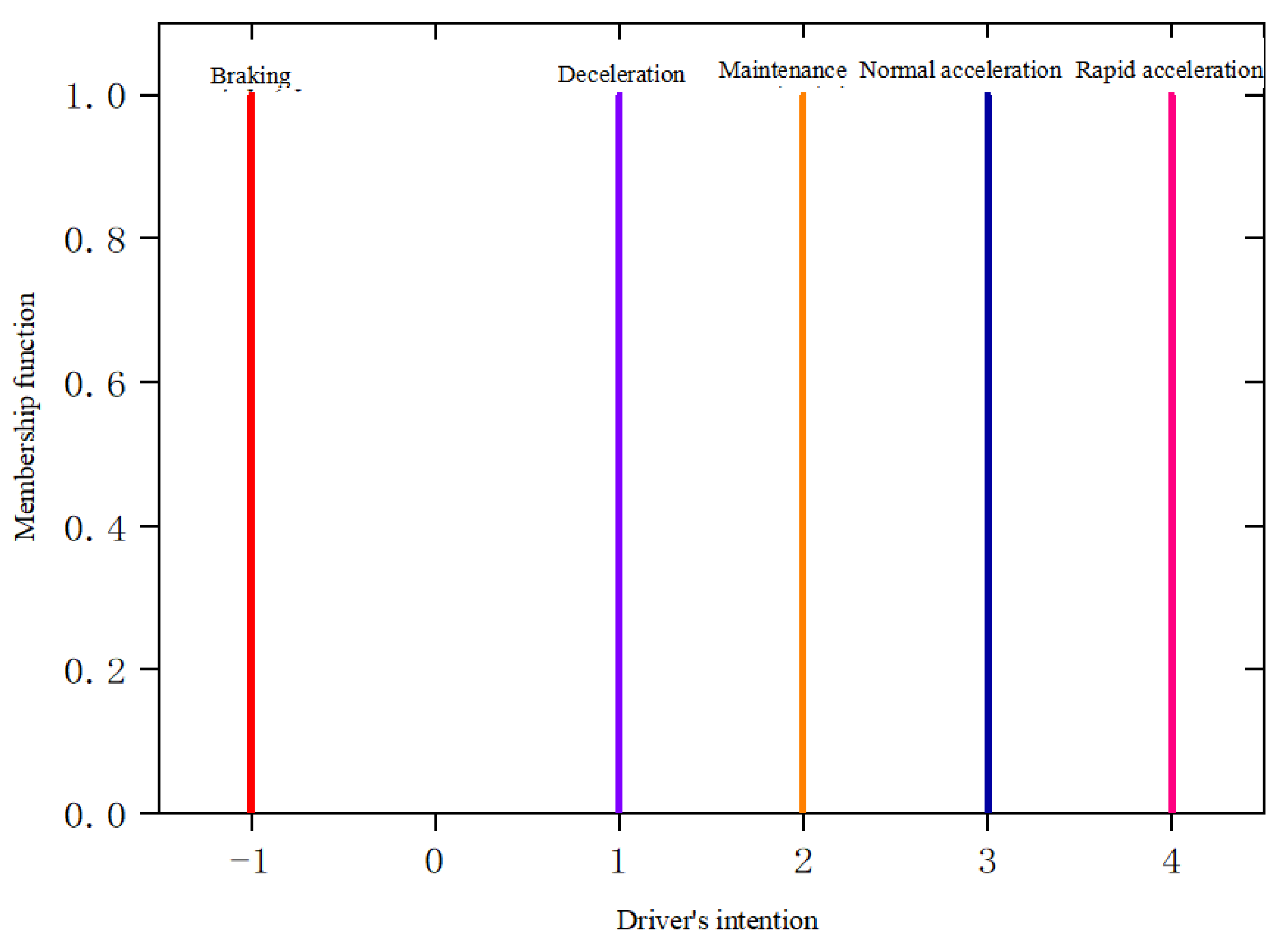
3.2. Establishment of Fuzzy Control Input and Output Membership Function
3.3. Driving Intention Recognition Process
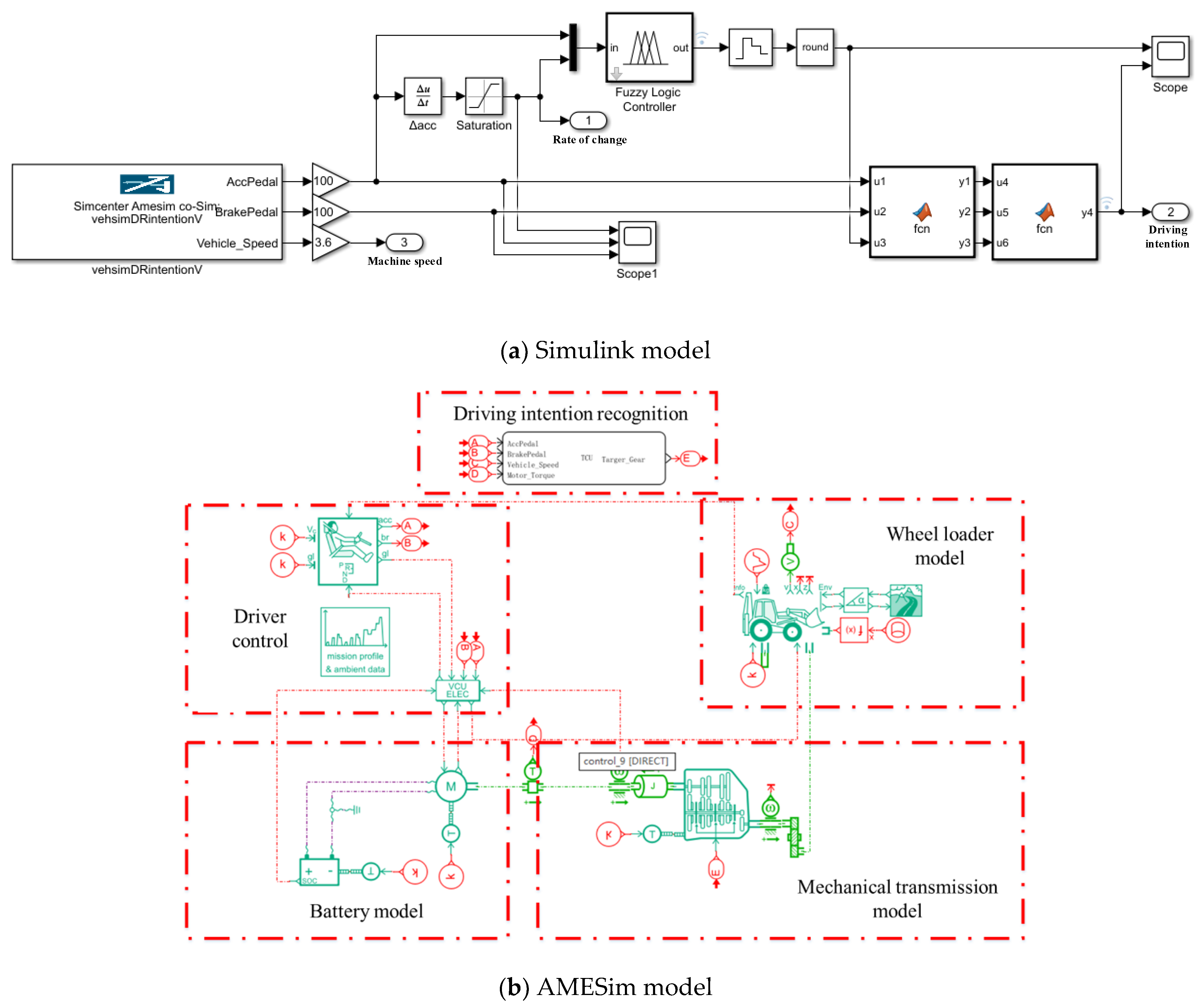
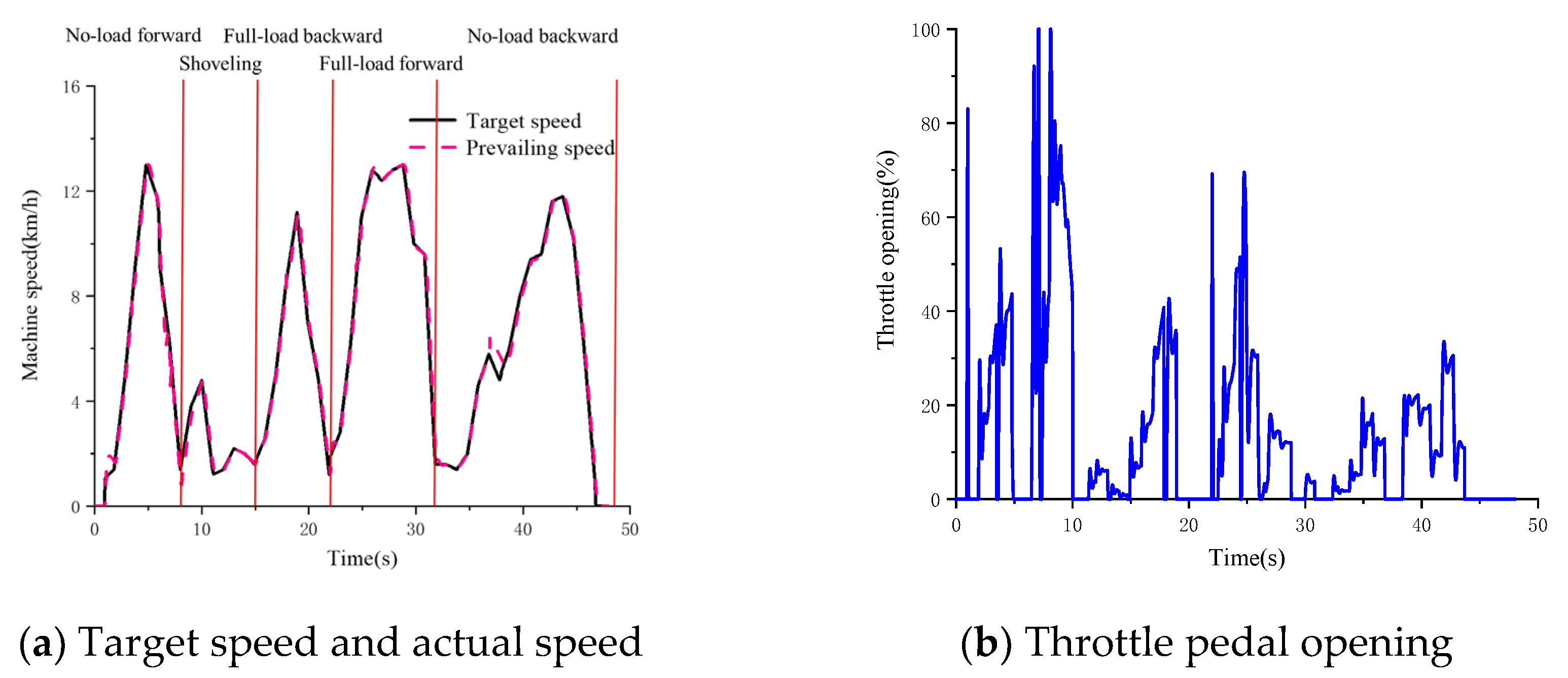
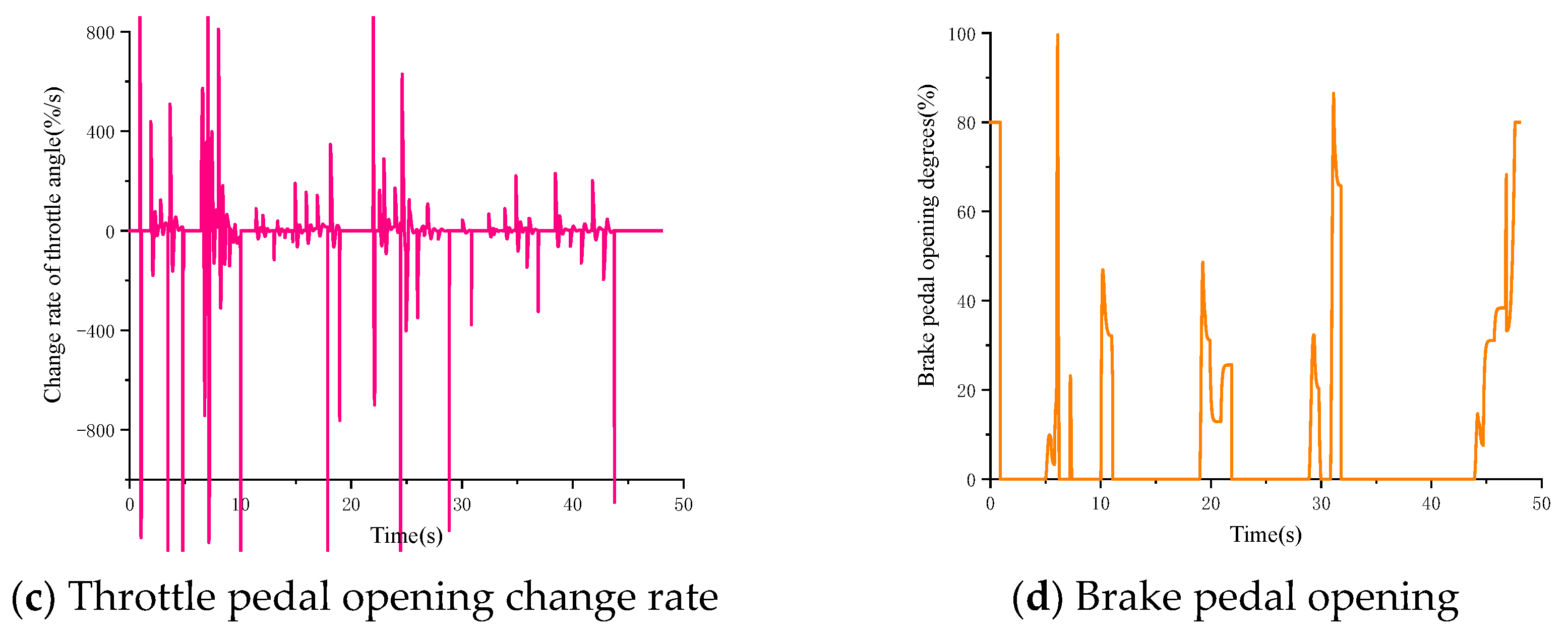
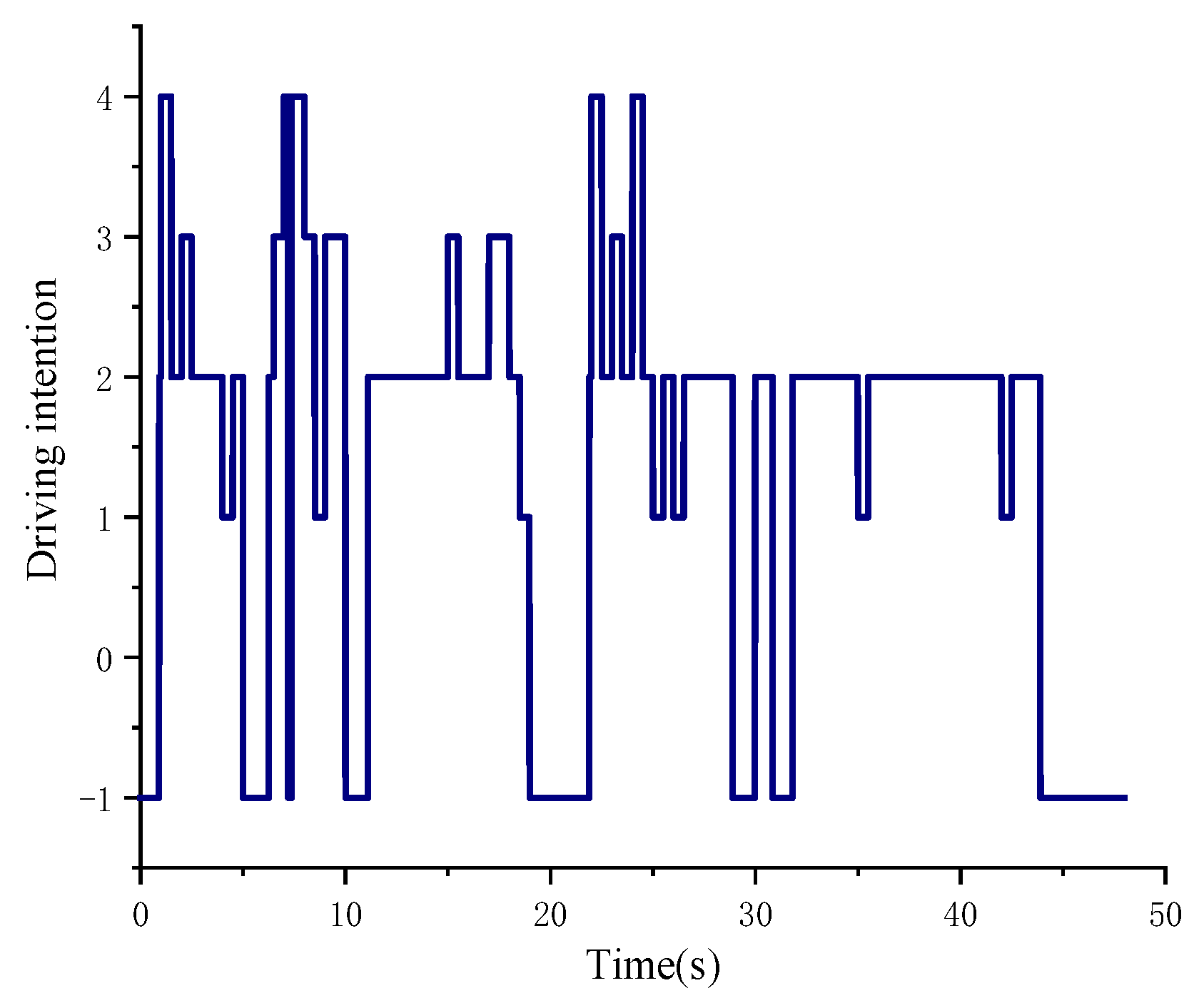
4. Simulation Research
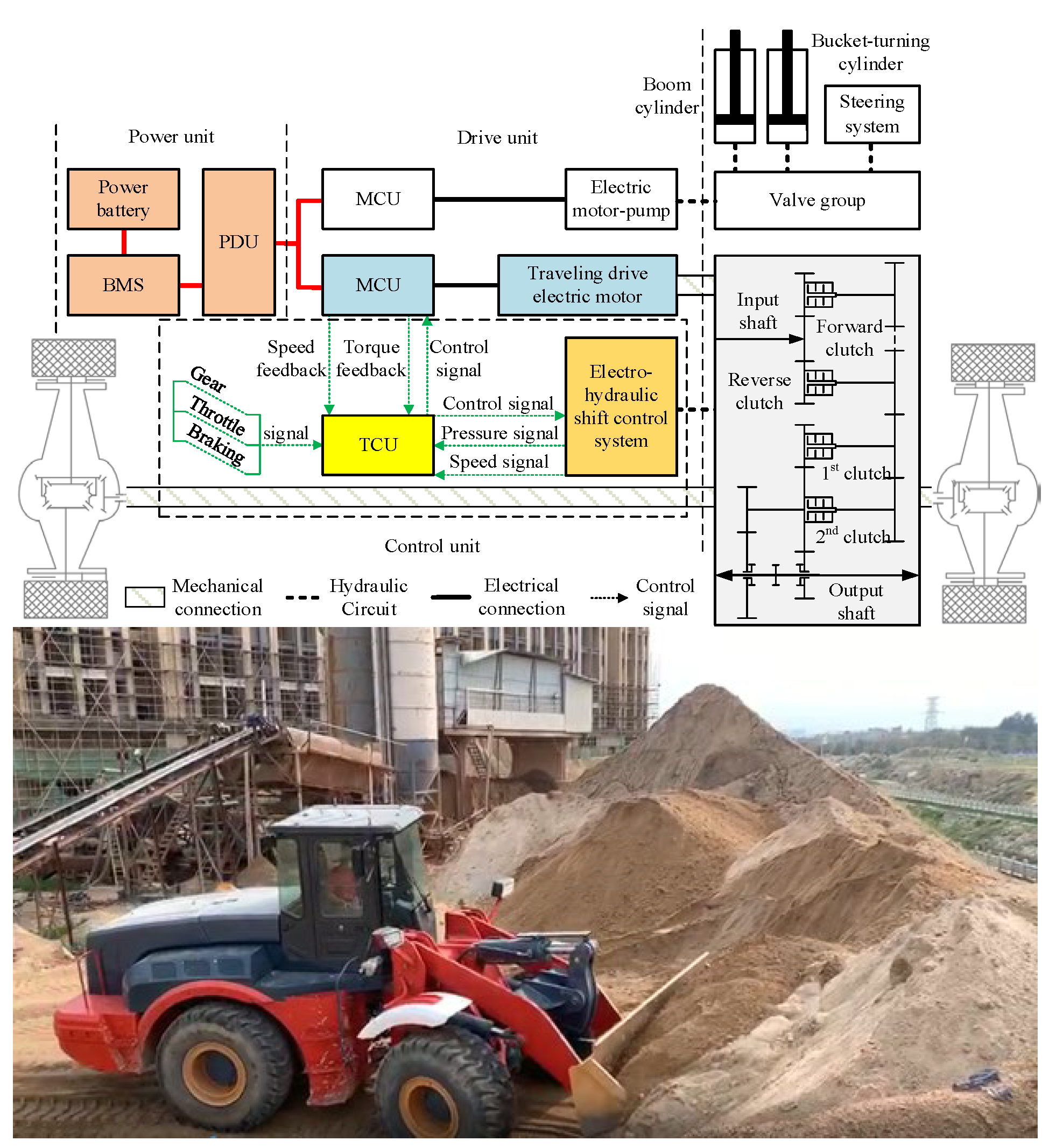
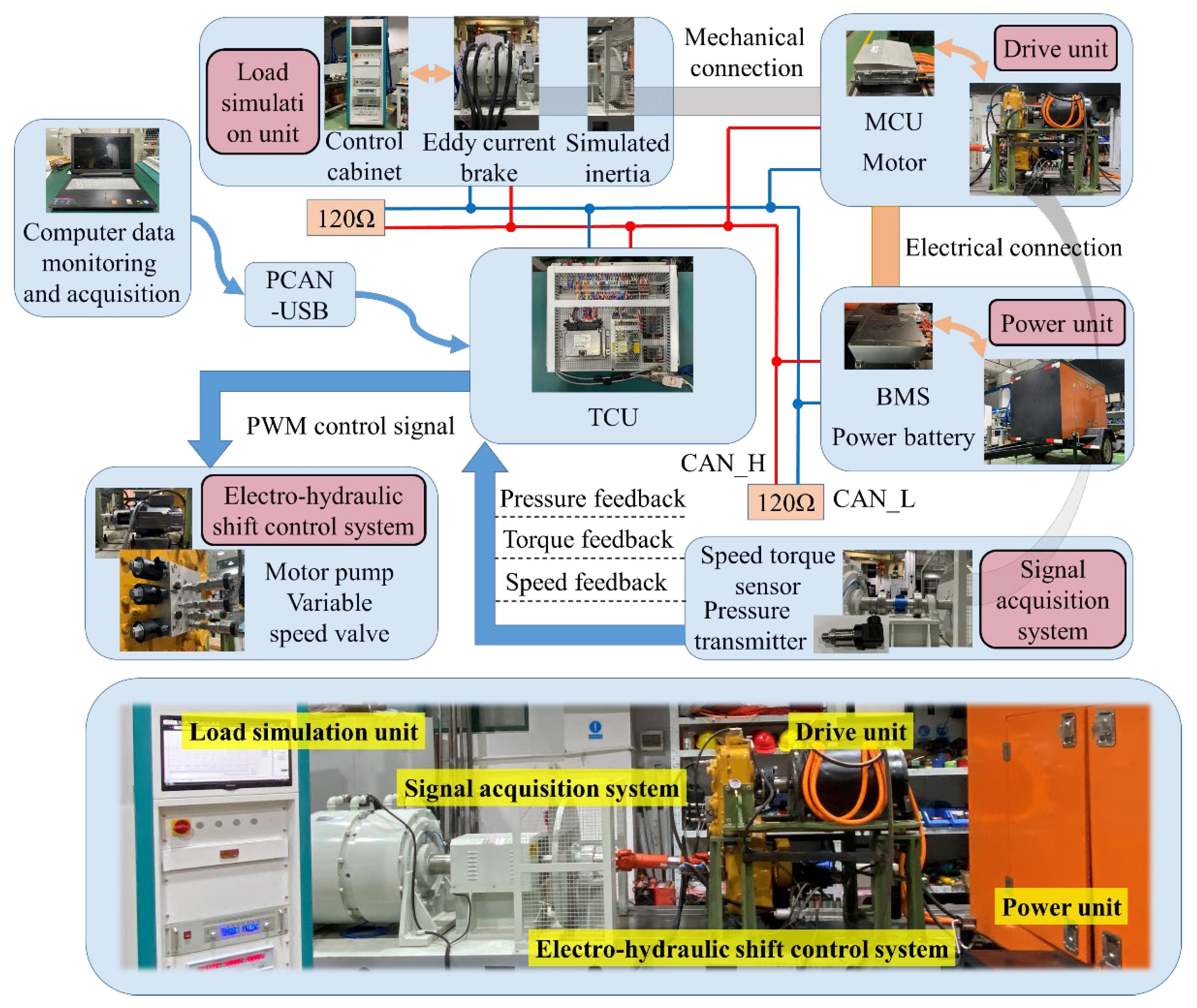
5. Experimental Research
- (1)
- Operator Input Signals: These include signals from the electronic accelerator pedal, electronic brake pedal, automatic shift switch, gear selection switch, drive mode selection switch, cruise mode switch, brake switch, regenerative brake switch, safety lock switch, power-on/off switch, cooling system switch, emergency switch, and others.
- (2)
- Detection Input Signals: These include analog signals such as the transmission output shaft speed, output shaft torque, oil pressure, and oil temperature.
- (3)
- Control Output Signals: These include solenoid valve control signals for shifting and safety locking.
- (4)
- Status Monitoring Signals: These include information on speed, torque, oil pressure, oil temperature, gear position, and faults.
- (5)
- Communication Interfaces: These include an RS232 serial communication interface for controller development and debugging, a CAN communication interface, and CAN communication interfaces for various components on the platform that simulate the CAN communication of a complete vehicle.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, X.; Yan, W.; Cao, H.; Chen, S.; Tao, G.; Zhang, J. Prospects for purely electric construction machinery: Mechanical components, control strategies and typical machines. Autom. Constr. 2024, 164, 105477. [Google Scholar] [CrossRef]
- Lin, T.; Lin, Y.; Ren, H.; Chen, H.; Chen, Q.; Li, Z. Development and key technologies of pure electric construction machinery. Renew. Sustain. Energy Rev. 2020, 132, 110080. [Google Scholar] [CrossRef]
- You, Y.; Sun, D.; Qin, D. Shift strategy of a new continuously variable transmission based wheel loader. Mech. Mach. Theory 2018, 130, 313–329. [Google Scholar] [CrossRef]
- Wang, H.; Ge, S.; Guo, D.; Jiang, Y. Fuel consumption of a wheel loader with power reflux hydraulic transmission system. J. Vibroengineering 2023, 25, 1327–1341. [Google Scholar] [CrossRef]
- Wang, Y.; Hu, Y.; Ming, Q. Torque Distribution Control Strategy of Electric Wheel Loader with Multiple Drive Motors Based on Optimal Motor Efficiency. SAE Int. J. Commer. Veh. 2023, 16, 257–269. [Google Scholar] [CrossRef]
- Wang, F.; Hong, J.; Ding, R.; Xu, B.; Fiebig, W.J. A Torque Conversion Solution to the Powertrain of Mobile Machine and Its Control Strategy. IEEE Trans. Veh. Technol. 2022, 71, 10361–10373. [Google Scholar] [CrossRef]
- Wang, X.; Wang, Z.; Wang, S.; Cai, W.; Wu, Q.; Ma, W. Design and Control Performance Optimization of Variable Structure Hydrostatic Drive Systems for Wheel Loaders. Machines 2024, 12, 238. [Google Scholar] [CrossRef]
- Cai, S.; Chen, Q.; Lin, T.; Xu, M.; Ren, H. Automatic Shift Control of an Electric Motor Direct Drive for an Electric Wheel loader. Machines 2022, 10, 403. [Google Scholar] [CrossRef]
- Qayamuddin, M.; Sarwar, M.; Siddiqui, A.S.; Haque, A.; Warsi, N.A. A novel control strategy for dual active bridge bidirectional converter for electric vehicle application. Energy Storage 2023, 5, e463. [Google Scholar] [CrossRef]
- Lv, D.; Yuan, L.; Zhu, B.; Liu, Z.; Bai, X. Research on multi objective intelligent shifting schedule of electric vehicle AMT considering ride comfort and economy. Int. J. Veh. Des. 2023, 92, 278–299. [Google Scholar] [CrossRef]
- Wu, G.; Jin, T.; Wang, J. Research on Multi-Mode Variable Parameter Intelligent Shift Control Method of Loader Based on RBF Network. Actuators 2024, 13, 234. [Google Scholar] [CrossRef]
- Li, C.; Chen, R.; Li, Y.; Yao, Z. Comprehensive shifting pattern of two speed transmission system for low-energy pure electric vehicles. China Mech. Eng. 2018, 29, 1818–1825, 1839. [Google Scholar]
- He, L.; Zong, C.; Wang, C. Driving Intention Recognition and Behaviour Prediction Based on a Double-layer Hidden Markov Model. J. Zhejiang Univ.-Sci. C (Comput. Electron.) 2012, 13, 208–217. [Google Scholar] [CrossRef]
- Gebert, P.; Roitberg, A.; Haurilet, M.; Stiefelhagen, R. End-to-end Prediction of Driver Intention Using 3d Convolutional Neural Networks. In Proceedings of the 2019 30th IEEE Intelligent Vehicles Symposium (iv19), Paris, France, 9–12 June 2019; IEEE: New York, NY, USA, 2019; pp. 969–974. [Google Scholar]
- Gilman, E.; Keskinarkaus, A.; Tamminen, S.; Pirttikangas, S.; Röning, J.; Riekki, J. Personalised Assistance for Fuel-efficient Driving. Transp. Res. Part C-Emerg. Technol. 2015, 58, 681–705. [Google Scholar] [CrossRef]
- Wang, Q.; Zhang, R.; Wang, Y.; Lv, S. Machine Learning-based Driving Style Identification of Truck Drivers in Open-pit Mines. Electronics 2020, 9, 19. [Google Scholar] [CrossRef]
- Halim, Z.; Kalsoom, R.; Baig, A.R. Profiling Drivers Based on Driver Dependent Vehicle Driving Features. Appl. Intell. 2016, 44, 645–664. [Google Scholar] [CrossRef]
- Wang, Y. A study of regenerative braking force distribution strategy for battery electric vehicle based on ECE R13. Mech. Eng. Autom. 2019, 1, 21–23. [Google Scholar]
- Yang, S.; Shi, Z.; Peng, Z.; Li, X.; Chu, J. Speed ratio control strategy of wheel loader with HMT based on PTO torque estimation. J. Mech. Eng. 2024, 60, 362–373. [Google Scholar]
- Li, X.; Zhang, X. Recognition method of braking intention of electric vehicles based on ABC-SVM algorithm. China Mech. Eng. 2023, 32, 2125–2135. [Google Scholar]
- Liu, Z.; Wu, X.; Ni, J. Driving intention recognition based on HMM and SVM cascade algorithm. Automot. Eng. 2018, 40, 858–864. [Google Scholar]
- Ji, X.; Fei, C.; He, X.; Liu, Y.; Liu, Y. Intention recognition and trajectory prediction for vehicles using LSTM network. China J. Highw. Transp. 2019, 32, 34–42. [Google Scholar]
- Jia, S.; Hui, F.; Wei, C.; Zhao, X.; Liu, J. Lane-Changing Behavior Prediction Based on Game Theory and Deep Learning. J. Adv. Transp. 2021, 2021, 6634960. [Google Scholar] [CrossRef]
- Jia, S.; Hui, F.; Li, S.; Zhao, X.; Khattak, A.J. Long term memory and convolutional neural network for abnormal driving behavior recognition. IET Intell. Transp. Syst. 2020, 14, 306–312. [Google Scholar] [CrossRef]
- Chen, S.; Wang, J.; Zhang, X.; Lv, L.; Zheng, L.Y. Overview of braking intention recognition for longitudinal dynamic control of vehicls. J. Hebei Univ. Sci. Technol. 2019, 40, 105–111. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Driving Intention | Classification | Feature |
|---|---|---|
| Accelerated intention | Rapid acceleration | The throttle pedal opening and the rate of change is very large. |
| Normal acceleration | The throttle opening change rate is moderate. | |
| Maintenance | The change rate of throttle opening is small or constant. |
| Driving Intention | Classification | Feature |
|---|---|---|
| Deceleration, braking intention | Deceleration | The throttle pedal opening decreases and the throttle opening change rate is negative. |
| Braking | The throttle pedal opening decreases rapidly and the brake pedal opening is positive. |
| Fuzzy Variable | Universe of Discourse | Linguistic Value | Membership Function |
|---|---|---|---|
| Throttle pedal opening | 0~20% | Zero ZO | Trapezium |
| 10~40% | Positive small PS | Triangle | |
| 20~70% | Positive medium PM | Triangle | |
| 40~100% | Positive big PB | Trapezium | |
| Change rate of throttle angle | −1000~−75%/s | Negative big NB | Trapezium |
| −125~−25%/s | Negative medium NM | Triangle | |
| −75~0%/s | Negative small NS | Triangle | |
| −10~10%/s | Zero ZO | Triangle | |
| 0~75%/s | Positive small PS | Triangle | |
| 25~125%/s | Positive medium PM | Triangle | |
| 75~800%/s | Positive big PB | Trapezium |
| Fuzzy Variable | Linguistic Value | Numbering | Membership Function |
|---|---|---|---|
| Driver’s intention | Braking | −1 | Single value |
| Deceleration | 1 | Single value | |
| Maintenance | 2 | Single value | |
| Normal acceleration | 3 | Single value | |
| Rapid acceleration | 4 | Single value |
| Driver’s Intention | Throttle Pedal Opening | ||||
|---|---|---|---|---|---|
| Zero | Small | Medium | Big | ||
| Throttle pedal opening rate of change | Positive big PB | Acceleration | Acceleration | Rapid acceleration | Rapid acceleration |
| Positive medium PM | Acceleration | Acceleration | Acceleration | Rapid acceleration | |
| Positive small PS | Maintenance | Maintenance | Acceleration | Acceleration | |
| Zero ZO | Maintenance | Maintenance | Maintenance | Acceleration | |
| Negative small NS | Maintenance | Maintenance | Deceleration | Deceleration | |
| Negative medium NM | Deceleration | Deceleration | Deceleration | Deceleration | |
| Negative big NB | Deceleration | Deceleration | Deceleration | Deceleration | |
| Parameters | Unit | Value |
|---|---|---|
| Size (length × width × height) | mm | 8130 × 2880 × 3450 |
| Mass | kg | 17,400 |
| Rated load | kg | 5000 |
| Maximum speed | km/h | 40 |
| Maximum traction torque | kN | 155 ± 5 |
| Maximum breakout force | kN | 167 |
| Type of drive axle | - | Four-wheel drive |
| Drive axle ratio | - | 4.375 |
| Wheel-end ratio | - | 5.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Lin, Y.; Xu, M.; Ren, H.; Li, G.; Lin, T. Driving Intention Recognition of Electric Wheel Loader Based on Fuzzy Control. Sensors 2025, 25, 32. https://doi.org/10.3390/s25010032
Chen Q, Lin Y, Xu M, Ren H, Li G, Lin T. Driving Intention Recognition of Electric Wheel Loader Based on Fuzzy Control. Sensors. 2025; 25(1):32. https://doi.org/10.3390/s25010032
Chicago/Turabian StyleChen, Qihuai, Yuanzheng Lin, Mingkai Xu, Haoling Ren, Guanjie Li, and Tianliang Lin. 2025. "Driving Intention Recognition of Electric Wheel Loader Based on Fuzzy Control" Sensors 25, no. 1: 32. https://doi.org/10.3390/s25010032
APA StyleChen, Q., Lin, Y., Xu, M., Ren, H., Li, G., & Lin, T. (2025). Driving Intention Recognition of Electric Wheel Loader Based on Fuzzy Control. Sensors, 25(1), 32. https://doi.org/10.3390/s25010032