

Novel Design on Knee Exoskeleton with Compliant Actuator for Post-Stroke Rehabilitation

 , ,
, ,
Abstract
1. Introduction
2. Methodology
2.1. Exoskeleton Design
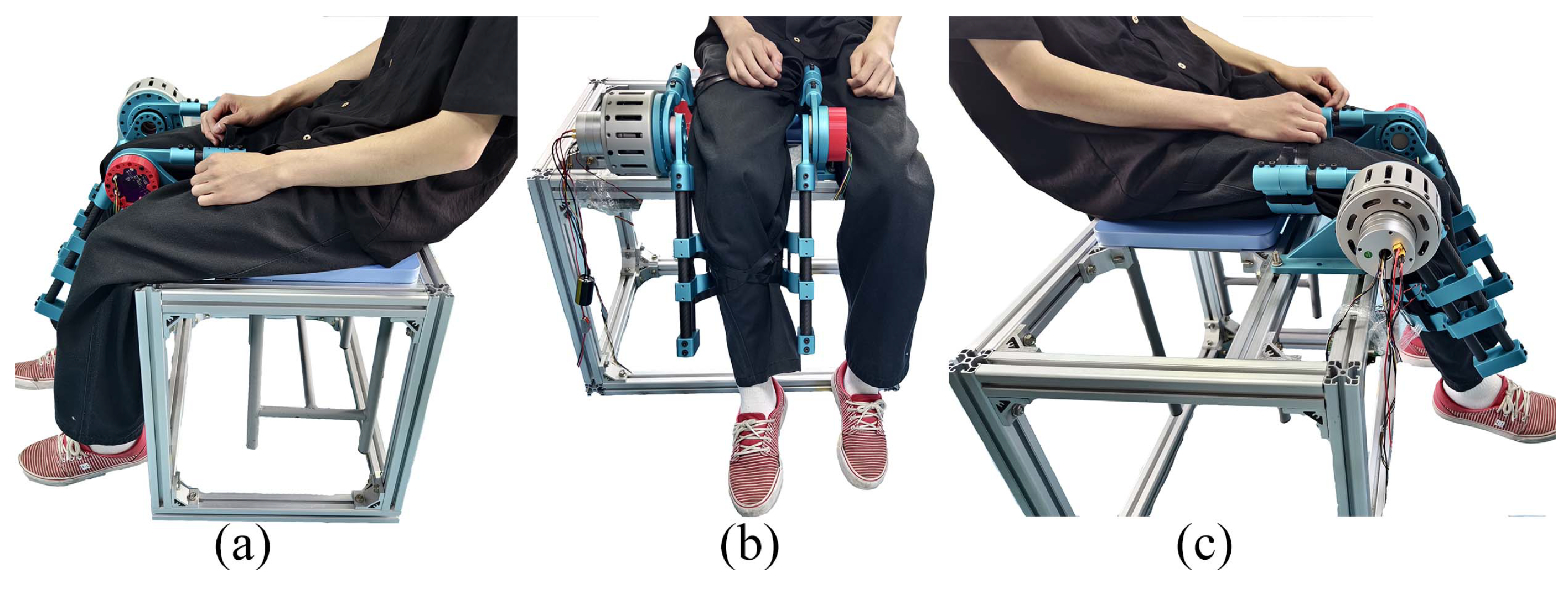
2.1.1. Structure of Exoskeleton Platform
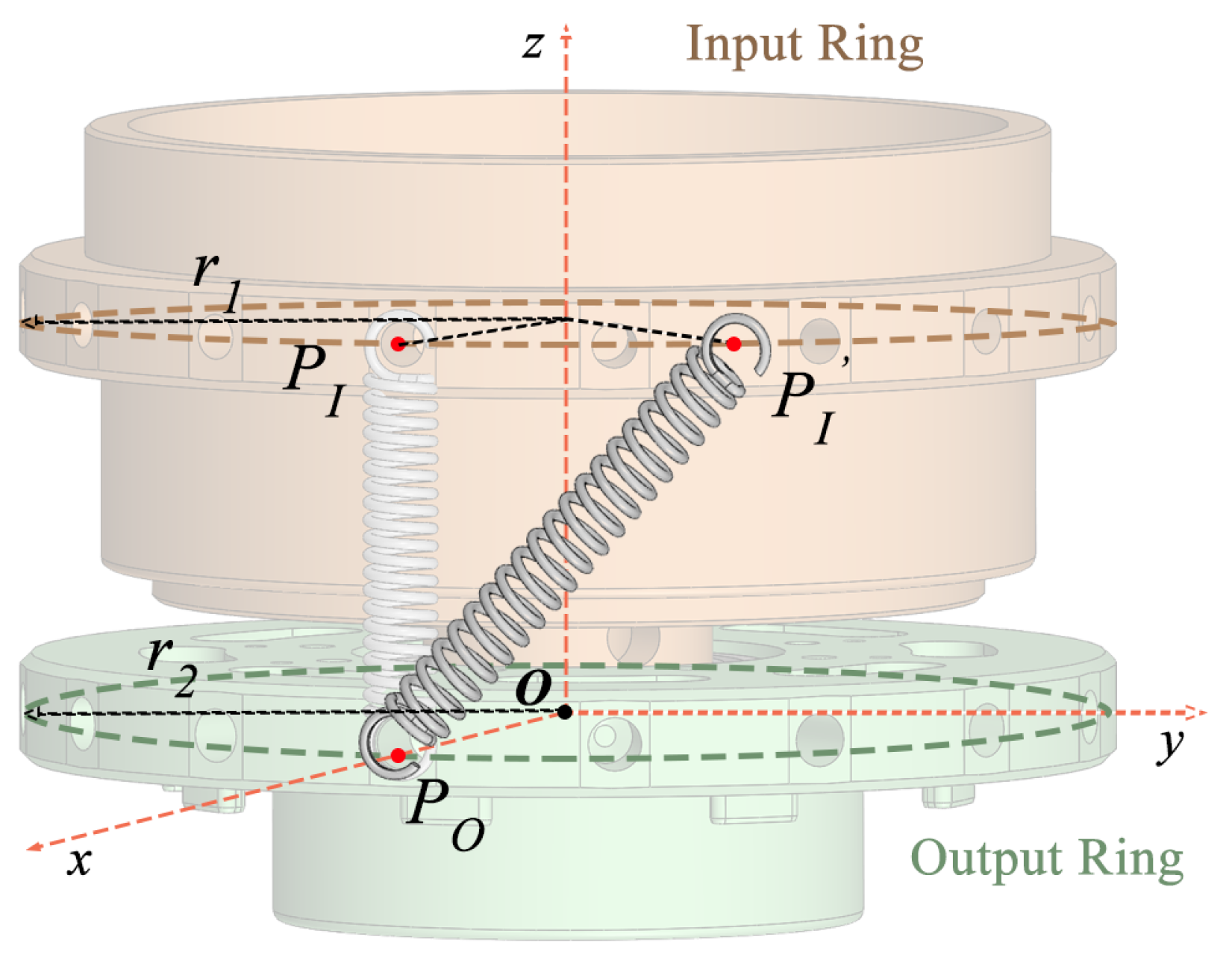
2.1.2. Kinematic Analysis
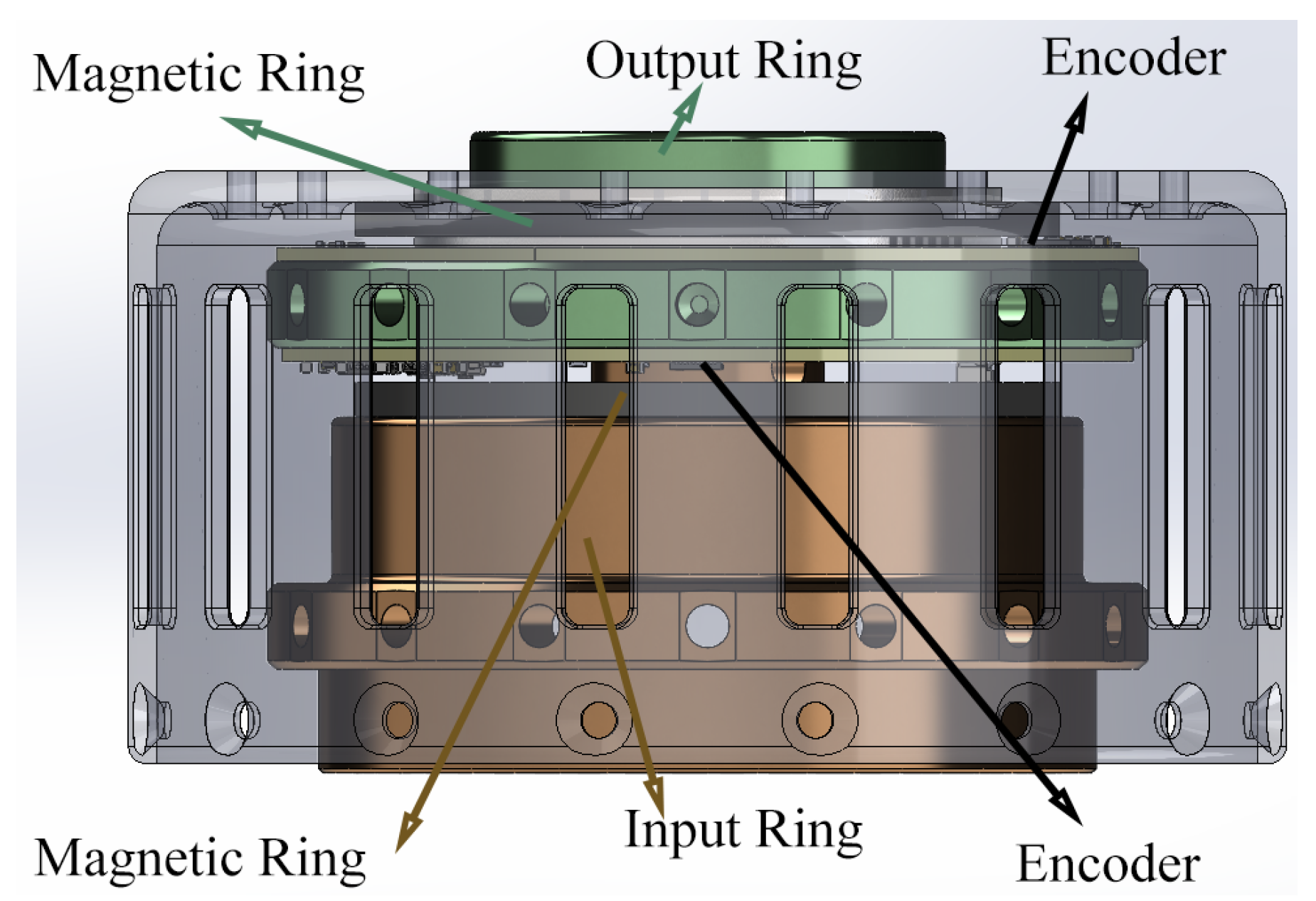
2.1.3. SEA Working Principle
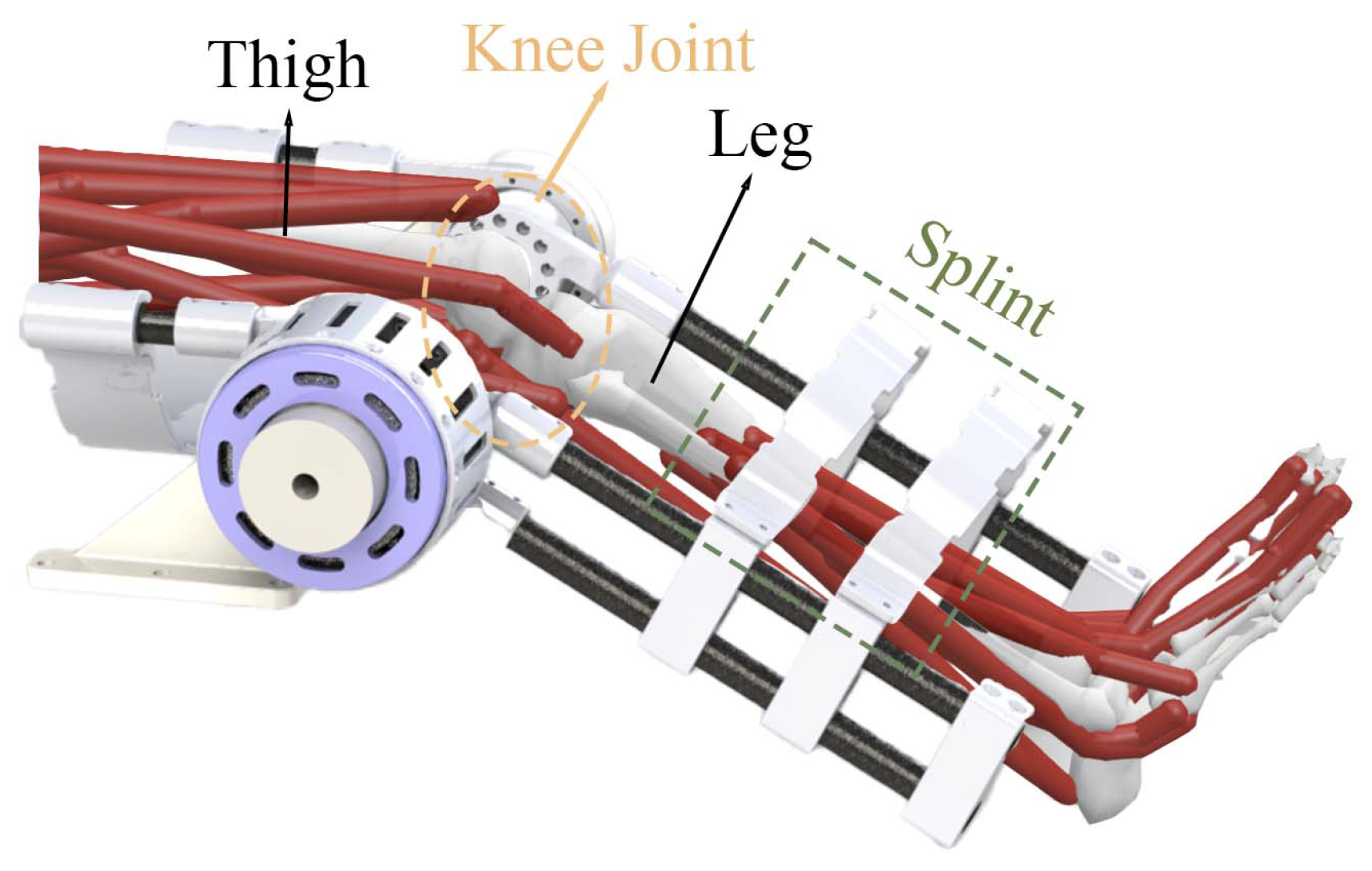
2.1.4. Setup of the Exoskeleton
2.2. Exoskeleton Control
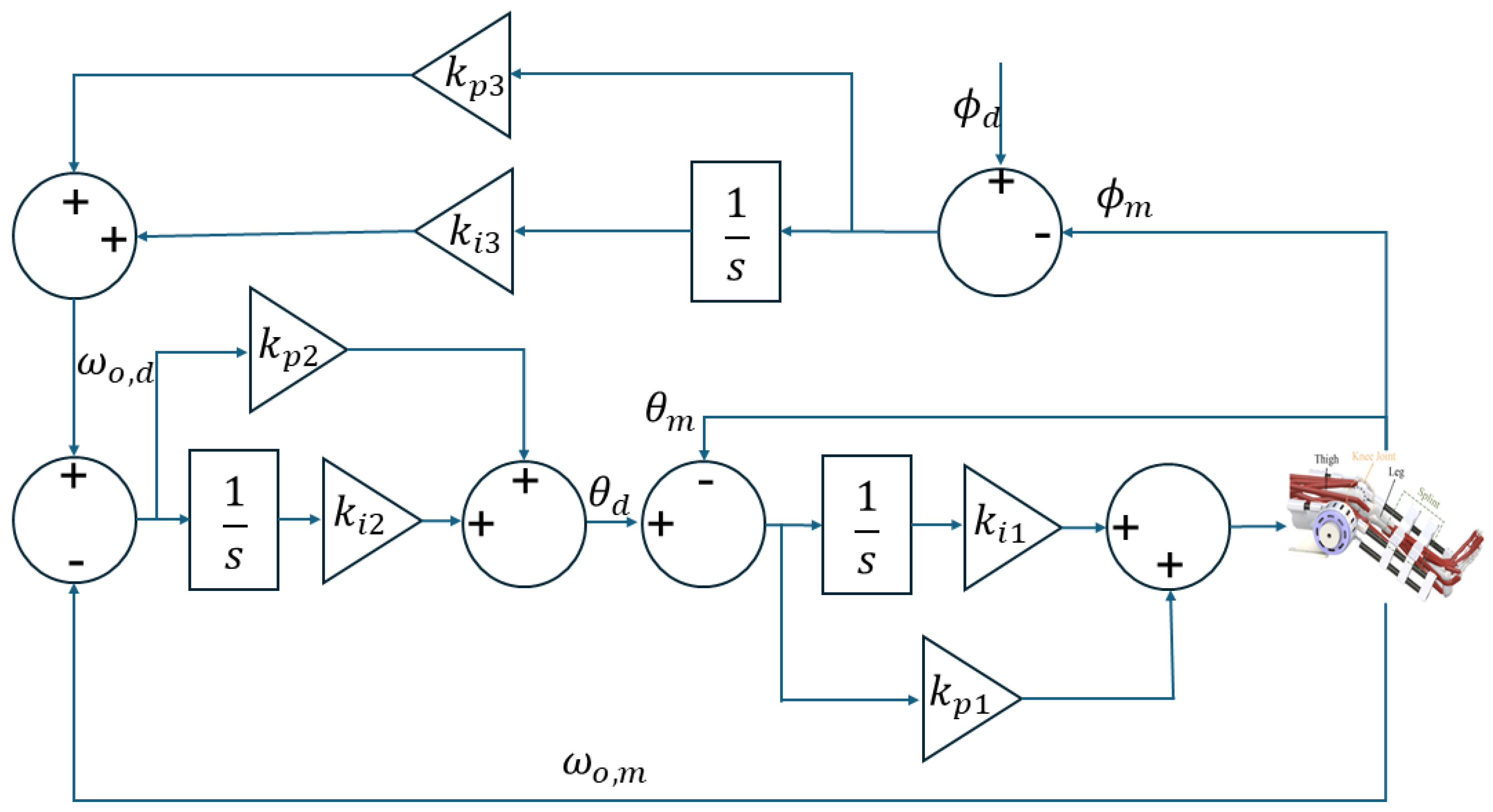
2.2.1. Cascaded PID Position Controller
2.2.2. Dynamics of the Exoskeleton
2.2.3. Position Control Loop
2.2.4. Velocity Control Loop
2.2.5. Deflection (Torque) Control Loop
2.2.6. Lyapunov Stability Analysis
2.3. Data Processing
2.3.1. Processing of Encoder Data
2.3.2. Calculation of Angular Speed
2.3.3. Parameters
- Step size (h): Sampling interval.
- Tuning parameter (r): Controls the response speed and smoothness.
2.3.4. Initialisation
2.3.5. Update Equations
- Initialise the state variables and .
- For each time step k:
- (a)
- Calculate the error .
- (b)
- Compute the intermediate variables , y, , , and a.
- (c)
- Calculate the non-linear function .
- (d)
- Update the state variables and for the next time step.
3. Experiments and Results
3.1. Exoskeleton Comparison
3.2. Trajectory Tracking Test
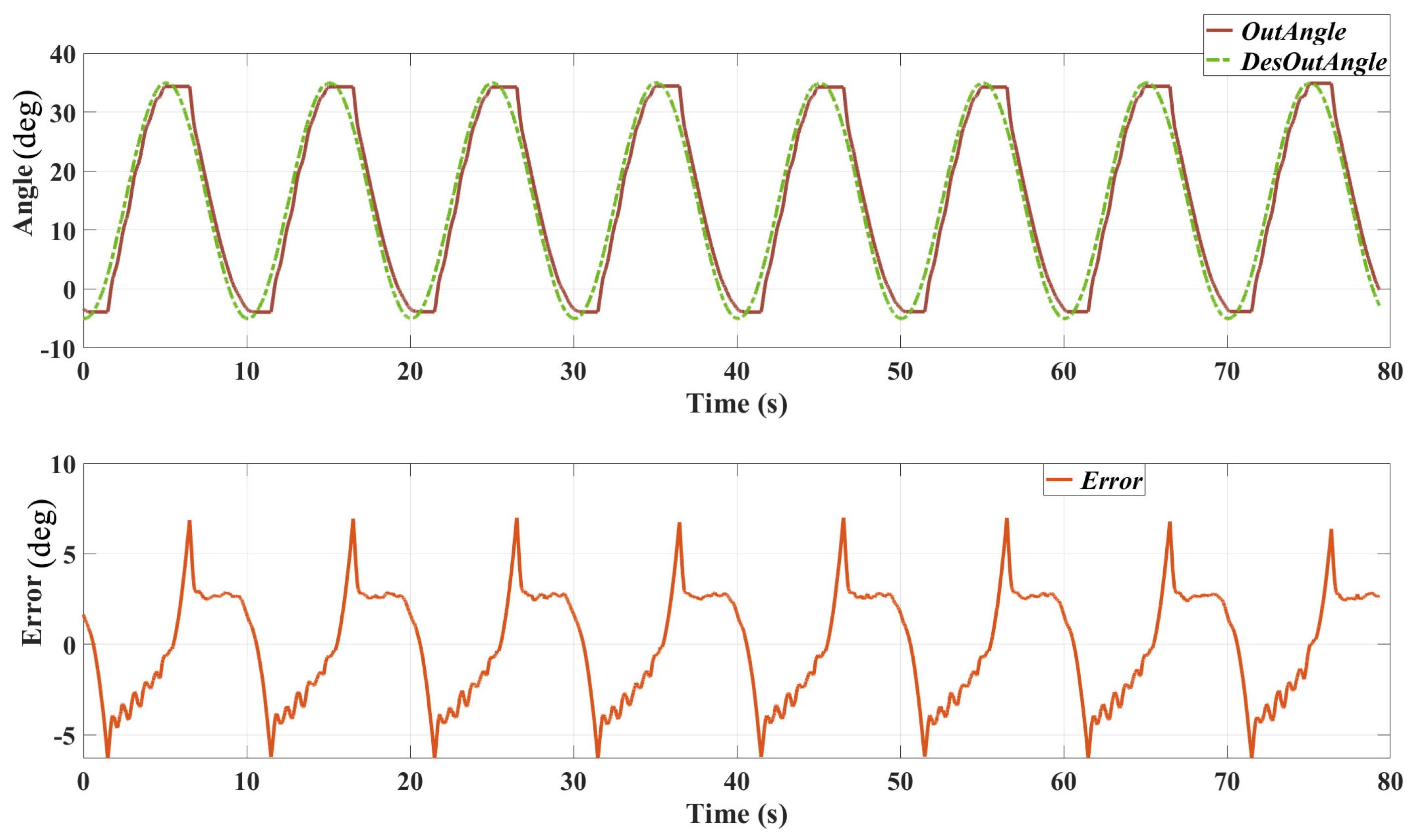
3.2.1. 0.1 Hz Sinusoidal Trajectory
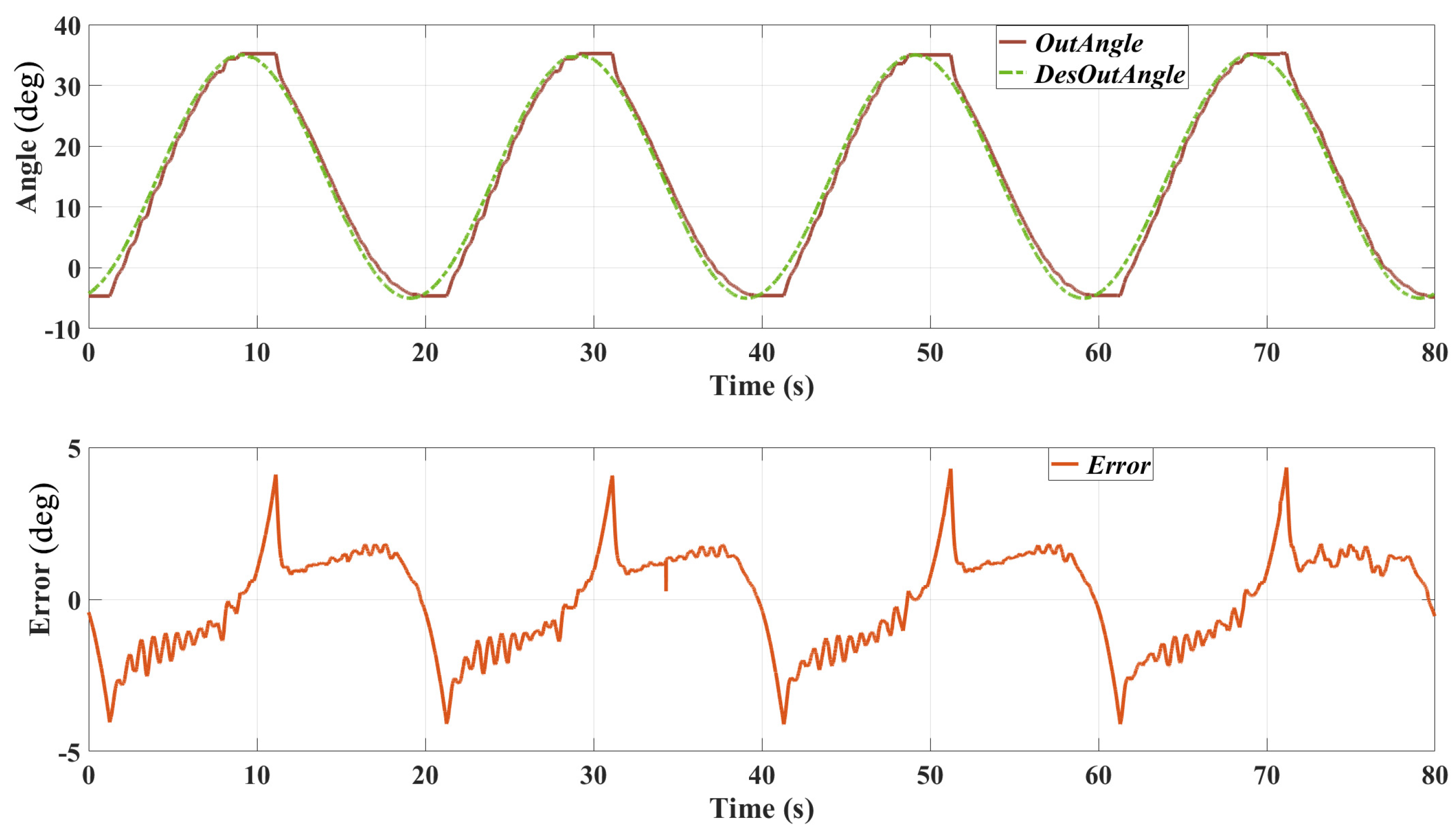
3.2.2. 0.05 Hz Sinusoidal Trajectory
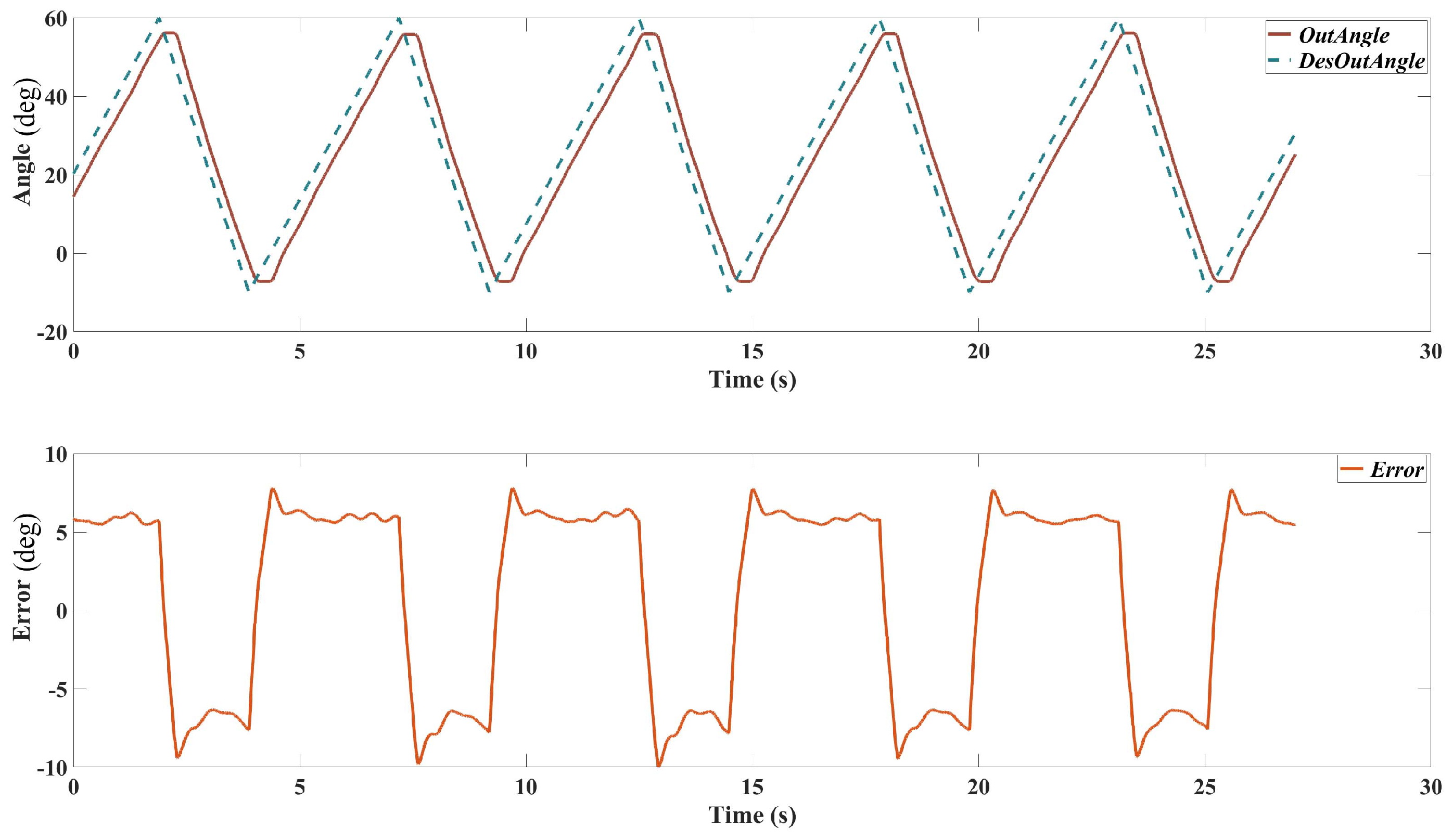
3.2.3. Patients Passive Training
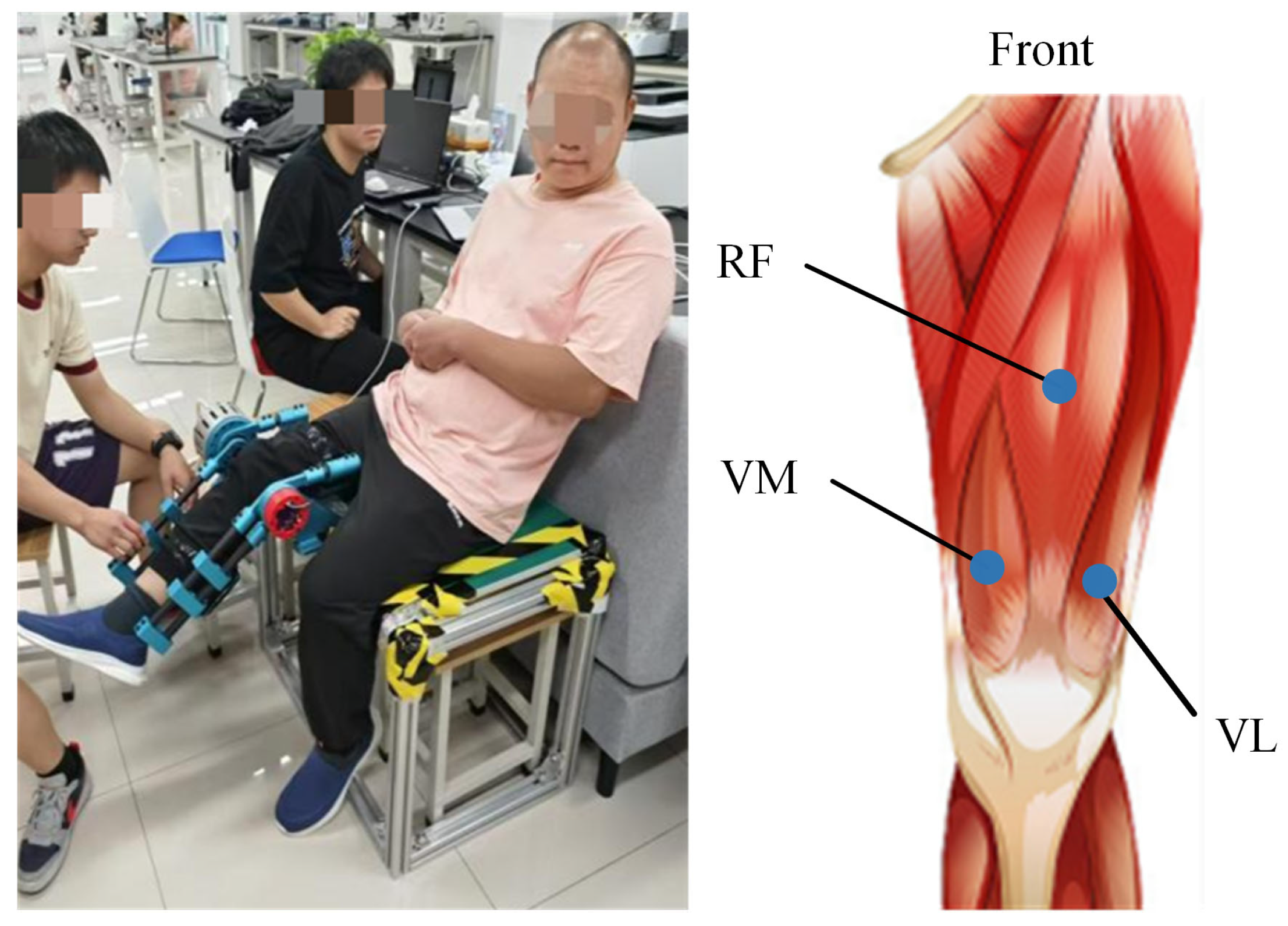
3.3. Clinical Test with Post-Stroke Patients
3.3.1. Experiment Setup
3.3.2. Data Pre-Processing
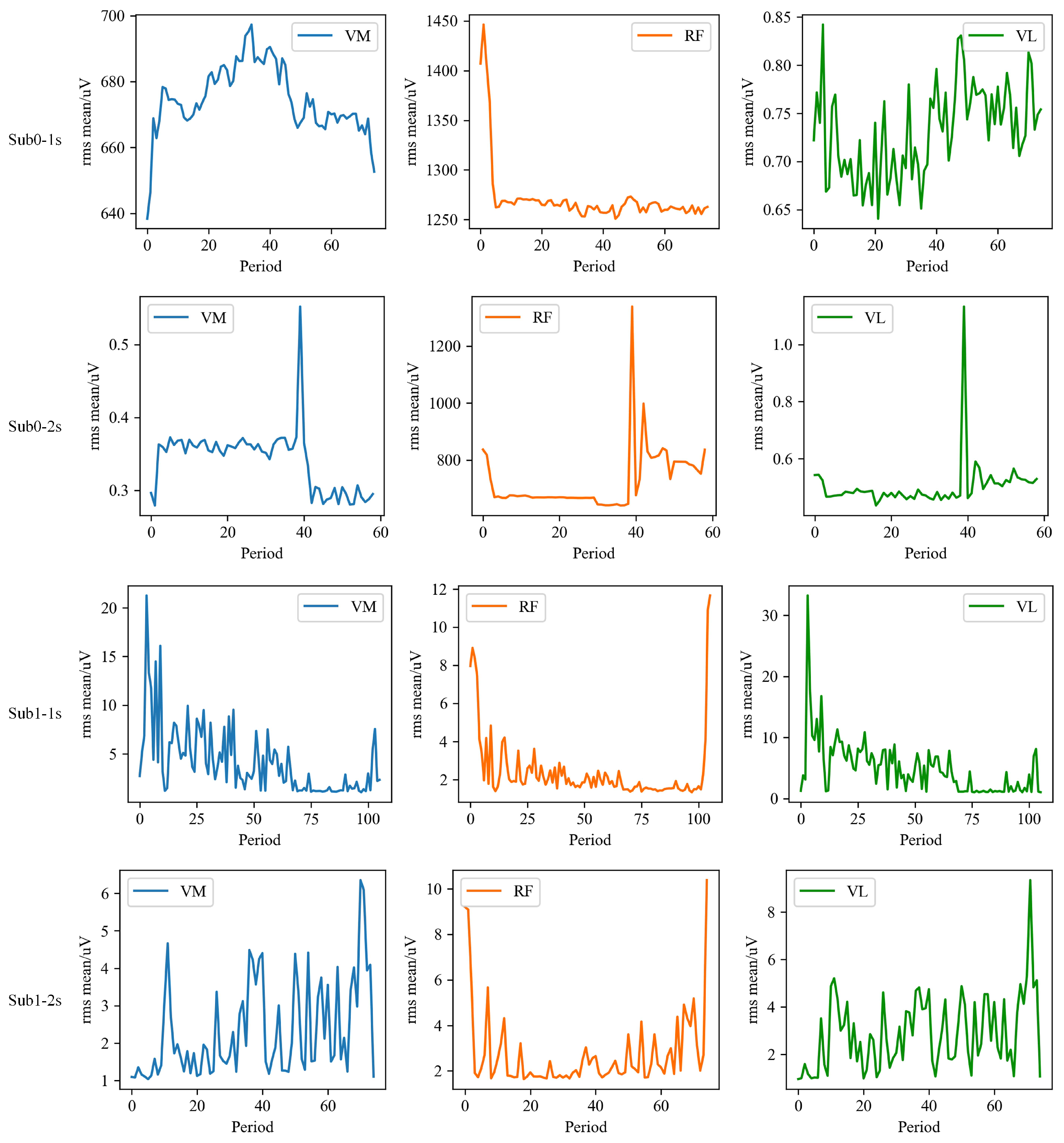
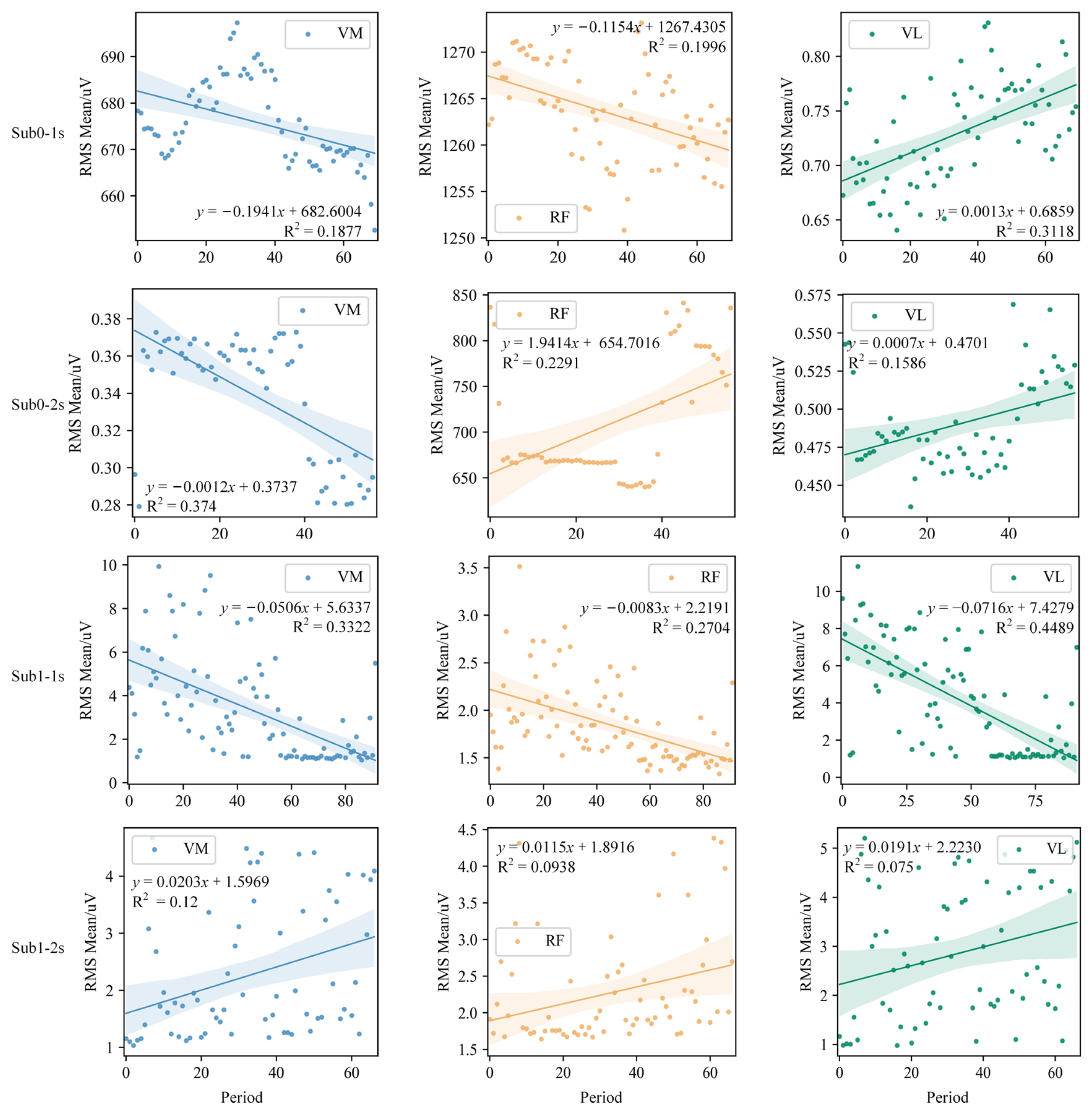
3.3.3. Visualisation of RMS Mean Results
3.3.4. Exoskeleton’s Impact on Muscle Tone
3.3.5. Impact of Passive Activity Velocity
4. Discussion
4.1. Analysis on Trajectory Tracking
4.2. Analysis on Clinical Performances
5. Limitations
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
List of Variables
| Variable | Description |
| Deflection angle between SEA input and output rings | |
| Position of the leg frame | |
| Angular speed of the leg frame | |
| Knee joint angle | |
| L | Distance from the knee joint to a reference point |
| Desired position of the leg frame | |
| Measured position of the leg frame | |
| Desired angular velocity of the leg frame | |
| Measured angular velocity of the leg frame | |
| Desired angular position for deflection angle | |
| Measured angular position for deflection angle | |
| Position error, | |
| Velocity error, | |
| Deflection control error, | |
| Gains for the deflection (torque) control loop | |
| Gains for the velocity control loop | |
| Gains for the position control loop | |
| J | Moment of inertia of the elastic actuator |
| b | Damping coefficient of the elastic actuator |
| Output torque of the SEA | |
| u | Control signal |
References
- Yang, Y.; Jiang, L.; Zhou, X.; Zhou, X.; Chen, H.; Chen, Z. Robotic-assisted total knee arthroplasty improves implant position and early functional recovery for the knee with severe varus/valgus deformity. BMC Musculoskelet. Disord. 2024, 25, 92. [Google Scholar] [CrossRef]
- Kang, Y.; Liu, C.; Ji, Y.; Zhang, H.; Wang, Y.; Bi, W.; Xu, J.; Guo, B. The burden of knee osteoarthritis worldwide, regionally, and nationally from 1990 to 2019, along with an analysis of cross-national inequalities. Arch. Orthop. Trauma Surg. 2024, 144, 1–13. [Google Scholar] [CrossRef]
- Guo, L.; Li, S.; Xie, S.; Bian, L.; Shaharudin, S. The impact of digital healthcare systems on pain and body function in patients with knee joint pain: A systematic review and meta-analysis. Sci. Rep. 2024, 14, 3310. [Google Scholar] [CrossRef]
- Faisting, A.L.R.F.; de Oliveira Sato, T. Effectiveness of ergonomic training to reduce physical demands and musculoskeletal symptoms-An overview of systematic reviews. Int. J. Ind. Ergon. 2019, 74, 102845. [Google Scholar] [CrossRef]
- Celebi, B.; Yalcin, M.; Patoglu, V. AssistOn-Knee: A self-aligning knee exoskeleton. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 996–1002. [Google Scholar]
- Sheng, Z.; Iyer, A.; Sun, Z.; Kim, K.; Sharma, N. A hybrid knee exoskeleton using real-time ultrasound-based muscle fatigue assessment. IEEE/ASME Trans. Mechatron. 2022, 27, 1854–1862. [Google Scholar] [CrossRef]
- Ben-David, C.; Ostraich, B.; Riemer, R. Passive knee exoskeleton increases vertical jump height. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 1796–1805. [Google Scholar] [CrossRef]
- de Miguel Fernández, J.; Rey-Prieto, M.; Salazar-Del Rio, M.; López-Matas, H.; Guirao-Cano, L.; Font-Llagunes, J.M.; Lobo-Prat, J. Adapted assistance and resistance training with a knee exoskeleton after stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 3265–3274. [Google Scholar] [CrossRef]
- Li, G.; Liang, X.; Lu, H.; Su, T.; Hou, Z.G. Development and Validation of a Self-Aligning Knee Exoskeleton with Hip Rotation Capability. IEEE Trans. Neural Syst. Rehabil. Eng. 2024, 32, 472–481. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Huang, Q.; Cai, K.; Wang, Z.; Wang, W.; Liu, J. A wearable soft knee exoskeleton using vacuum-actuated rotary actuator. IEEE Access 2020, 8, 61311–61326. [Google Scholar] [CrossRef]
- Brahmia, A.; Kelaiaia, R. Design of a Human Knee Reeducation Mechanism. Acta Univ. Sapientiae Electr. Mech. Eng. 2019, 11, 42–53. [Google Scholar] [CrossRef]
- Beyl, P.; Knaepen, K.; Duerinck, S.; Van Damme, M.; Vanderborght, B.; Meeusen, R.; Lefeber, D. Safe and compliant guidance by a powered knee exoskeleton for robot-assisted rehabilitation of Gait. Adv. Rob. 2011, 25, 513–535. [Google Scholar] [CrossRef]
- Kelaiaia, R.; Chemori, A.; Brahmia, A.; Kerboua, A.; Zaatri, A.; Company, O. Optimal dimensional design of parallel manipulators with an illustrative case study: A review. Mech. Mach. Theory 2023, 188, 105390. [Google Scholar] [CrossRef]
- Singh, R.; Chaudhary, H.; Singh, A.K. A novel gait-based synthesis procedure for the design of 4-bar exoskeleton with natural trajectories. J. Orthop. Transl. 2018, 12, 6–15. [Google Scholar] [CrossRef] [PubMed]
- Asker, A.; Xie, S.; Dehghani-Sanij, A.A. Multi-objective optimization of force transmission quality and joint misalignment of a 5-bar knee exoskeleton. In Proceedings of the 2021 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Delft, The Netherlands, 12–16 July 2021; pp. 122–127. [Google Scholar]
- Niu, Y.; Song, Z.; Dai, J. Kinematic analysis and optimization of a planar parallel compliant mechanism for self-alignment knee exoskeleton. Mech. Sci. 2018, 9, 405–416. [Google Scholar] [CrossRef]
- Sarkisian, S.V.; Ishmael, M.K.; Lenzi, T. Self-aligning mechanism improves comfort and performance with a powered knee exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 629–640. [Google Scholar] [CrossRef]
- Calanca, A.; Fiorini, P. On the Role of Compliance in Force Control. In Intelligent Autonomous Systems 13; Springer: Cham, Switzerland, 2015; pp. 1243–1255. [Google Scholar]
- Hogan, N. Contact and Physical Interaction. Annu. Rev. Control Rob. Auton. Syst. 2022, 5, 179–203. [Google Scholar] [CrossRef]
- Chen, T.; Casas, R.; Lum, P.S. An Elbow Exoskeleton for Upper Limb Rehabilitation With Series Elastic Actuator and Cable-Driven Differential. IEEE Trans. Rob. 2019, 35, 1464–1474. [Google Scholar] [CrossRef]
- Losey, D.P.; Erwin, A.; McDonald, C.G.; Sergi, F.; O’Malley, M.K. A Time-Domain Approach to Control of Series Elastic Actuators: Adaptive Torque and Passivity-Based Impedance Control. IEEE/ASME Trans. Mechatron. 2016, 21, 2085–2096. [Google Scholar] [CrossRef]
- Qian, Y.; Han, S.; Wang, Y.; Yu, H.; Fu, C. Toward Improving Actuation Transparency and Safety of a Hip Exoskeleton with a Novel Nonlinear Series Elastic Actuator. IEEE/ASME Trans. Mechatron. 2023, 28, 417–428. [Google Scholar] [CrossRef]
- Kong, K.; Bae, J.; Tomizuka, M. Control of Rotary Series Elastic Actuator for Ideal Force-Mode Actuation in Human-Robot Interaction Applications. IEEE/ASME Trans. Mechatron. 2009, 14, 105–118. [Google Scholar] [CrossRef]
- Park, K.W.; Choi, J.; Kong, K. Hybrid Filtered Disturbance Observer for Precise Motion Generation of a Powered Exoskeleton. IEEE Trans. Ind. Electron. 2023, 70, 646–656. [Google Scholar] [CrossRef]
- Han, S.; Wang, H.; Tian, Y.; Yu, H. Enhanced Extended State Observer-based Model-Free Force Control for a Series Elastic Actuator. Mech. Syst. Signal Process. 2023, 183, 109584. [Google Scholar] [CrossRef]
- Lin, Y.; Chen, Z.; Yao, B. Decoupled Torque Control of Series Elastic Actuator with Adaptive Robust Compensation of Time-Varying Load-Side Dynamics. IEEE Trans. Ind. Electron. 2020, 67, 5604–5614. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, A.; Lobo-Prat, J.; Tarragó, R.; Chaverri, D.; Iglesias, X.; Guirao-Cano, L.; Font-Llagunes, J.M. Comparing walking with knee-ankle-foot orthoses and a knee-powered exoskeleton after spinal cord injury: A randomized, crossover clinical trial. Sci. Rep. 2022, 12, 19150. [Google Scholar] [CrossRef]
- Evans, N.; Hartigan, C.; Kandilakis, C.; Pharo, E.; Clesson, I. Acute Cardiorespiratory and Metabolic Responses During Exoskeleton-Assisted Walking Overground Among Persons with Chronic Spinal Cord Injury. Top. Spinal Cord Inj. Rehabil. 2015, 21, 122–132. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Hochstein, J.; Kim, C.; Tucker, L.; Hammel, L.E.; Damiano, D.L.; Bulea, T.C. A Pediatric Knee Exoskeleton with Real-Time Adaptive Control for Overground Walking in Ambulatory Individuals with Cerebral Palsy. Front. Robot. AI 2021, 8, 702137. [Google Scholar] [CrossRef] [PubMed]
- Cestari, M.; Sanz-Merodio, D.; Arevalo, J.; Garcia, E. An adjustable compliant joint for lower-limb exoskeletons. IEEE/ASME Trans. Mechatron. 2015, 20, 889–898. [Google Scholar] [CrossRef]
- Jammeli, I.; Chemori, A.; Moon, H.; Elloumi, S.; Mohammed, S. An Assistive Explicit Model Predictive Control Framework for a Knee Rehabilitation Exoskeleton. IEEE/ASME Trans. Mechatron. 2021, 26, 2696–2707. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | DoFs | Actuation | Portable | Max Knee Cont. Torque (Nm) | Assist Early Stage Patient | On-Bed Training |
|---|---|---|---|---|---|---|
| This study | 1 | Compliant | No | 42 | Yes | Yes |
| ABLE [28] | 1 | Rigid | Yes | N/A | No | No |
| Indego [29] | 2 | Rigid | Yes | N/A | No | No |
| P.REX [30] | 1 | Rigid | Yes | 15.7 | No | No |
| ATLAS [31] | 1 | Compliant | Yes | 30 | No | No |
| EICOSI [32] | 1 | Rigid | Yes | 18 | No | No |
| ABLE-KS [8] | 1 | Rigid | Yes | 30 | No | No |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, L.; Wang, C.; Liu, J.; Zou, B.; Chakrabarty, S.; Bao, T.; Xie, S.Q. Novel Design on Knee Exoskeleton with Compliant Actuator for Post-Stroke Rehabilitation. Sensors 2025, 25, 153. https://doi.org/10.3390/s25010153
Wu L, Wang C, Liu J, Zou B, Chakrabarty S, Bao T, Xie SQ. Novel Design on Knee Exoskeleton with Compliant Actuator for Post-Stroke Rehabilitation. Sensors. 2025; 25(1):153. https://doi.org/10.3390/s25010153
Chicago/Turabian StyleWu, Lin, Chao Wang, Jiawei Liu, Benjian Zou, Samit Chakrabarty, Tianzhe Bao, and Sheng Quan Xie. 2025. "Novel Design on Knee Exoskeleton with Compliant Actuator for Post-Stroke Rehabilitation" Sensors 25, no. 1: 153. https://doi.org/10.3390/s25010153
APA StyleWu, L., Wang, C., Liu, J., Zou, B., Chakrabarty, S., Bao, T., & Xie, S. Q. (2025). Novel Design on Knee Exoskeleton with Compliant Actuator for Post-Stroke Rehabilitation. Sensors, 25(1), 153. https://doi.org/10.3390/s25010153