
Low-Complexity 2D-DOD and 2D-DOA Estimation in Bistatic MIMO Radar Systems: A Reduced-Dimension MUSIC Algorithm Approach





Abstract
1. Introduction
Motivation and Contribution
- We present a new RD-MUSIC algorithm for efficient and high-resolution estimation Of 2D-DOD and 2D-DOA in bistatic MIMO radar systems. This innovative approach fundamentally transforms a complex 4D problem into a one-dimensional search. This is a significant advancement for MIMO radar systems.
- We construct a novel 4D spatial spectrum function using the spatial diversity of array response vectors, which is pivotal for accurately resolving the complex angular parameters of multiple targets simultaneously.
- We convert the complex 4D spatial spectrum function into a simplified two-dimensional search within a 4D measurement space. This improves computational efficiency while retaining high accuracy in the estimation process.
- We conduct a comprehensive simulation to demonstrate the exceptional performance of our method. The effectiveness of our algorithm is validated against several state-of-the-art methods, demonstrating considerable computational savings, high-resolution estimation, and robust precision across diverse scenarios.
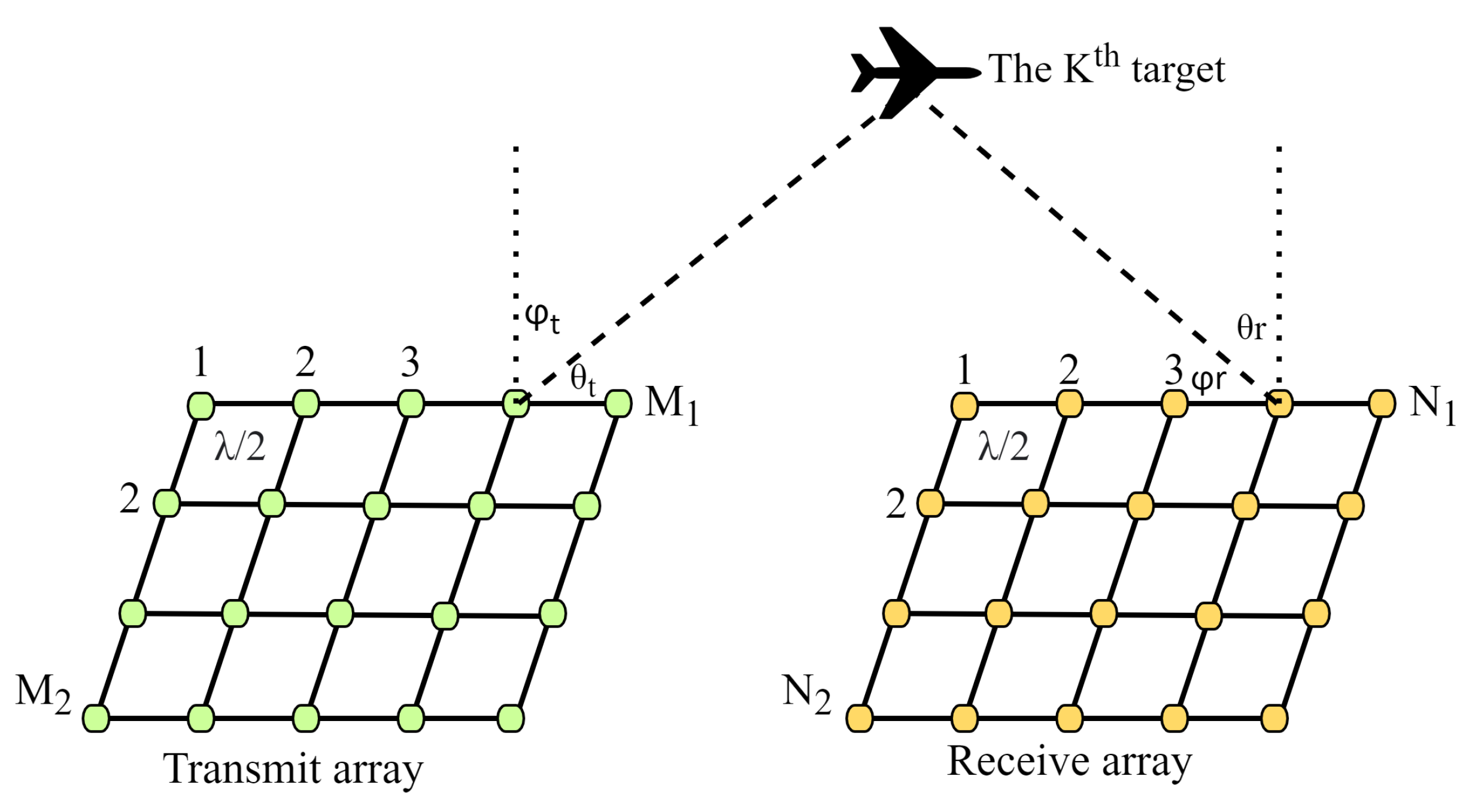
2. MIMO Radar System with Uniform Planar Arrays
3. 2D-DOD and 2D-DOA Estimation
3.1. Proposed Algorithm
3.2. The Main Steps of the Proposed Algorithm
| Algorithm 1 Steps of the proposed algorithm. | |
| Objectives: Perform joint estimation of 2D-DOD and 2D-DOA for multiple targets in a bistatic MIMO radar system with UPAs using the RD-MUSIC algorithm. | |
| Input: | |
| 1 | Calculate and decompose the covariance matrix to extract and as in (7). |
| 2 | Construct the 4D spatial spectrum function using , and simplify to a 2D search problem (8) and (14). |
| 3 | Conduct a 2D exhaustive search to locate the spectrum peaks, and estimate the 2D-DOD and 2D-DOA angles and (15) and (16). |
| 4 | Pair with using LS (18). |
| 5 | Obtain and then , using (19) and (20). |
| Output: Optimally estimated 2D-DOD and 2D-DOA angles for each target. | |
4. Performance Analysis
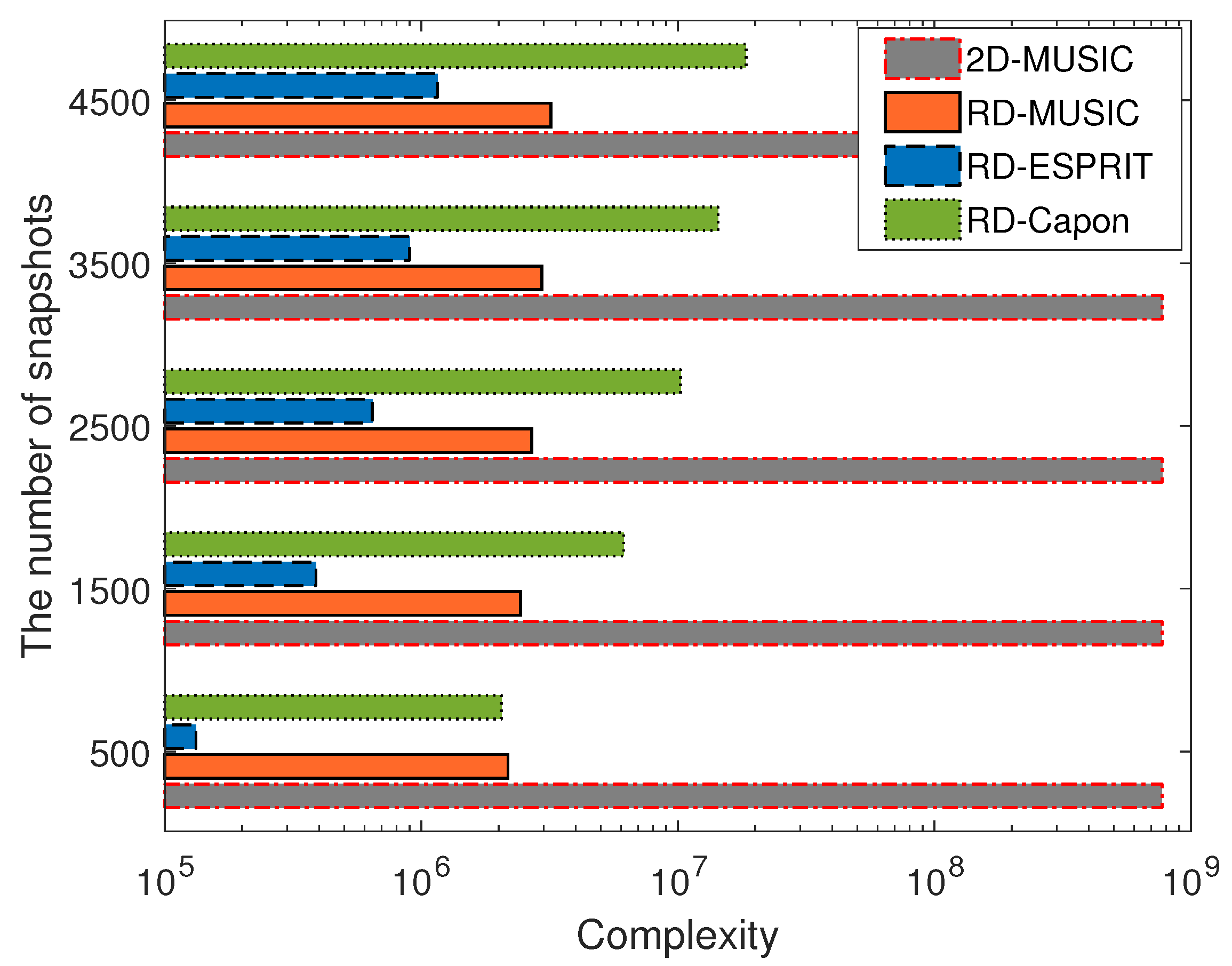
4.1. Computation Complexity Analysis
4.2. Advantages of Proposed Algorithm
- The Proposed algorithm significantly decreases the computational complexity by transforming a four-dimensional estimation problem into a two-dimensional search, leading to faster processing times and analysis without sacrificing accuracy, making it highly suitable for real-time radar processing applications.
- By constructing a novel 4D spatial spectrum function, the proposed method achieves high-resolution estimation of 2D-DOD and 2D-DOA, crucial for the precise detection and tracking of multiple targets in bistatic MIMO radar systems.
- The proposed technique outperforms several existing methods across diverse operational scenarios in terms of accuracy and robustness.
- The proposed technique offers significant computational savings, leading to cost reductions in both radar systems’ development and operational phases.
5. Simulation Results
5.1. Spectrum Estimation
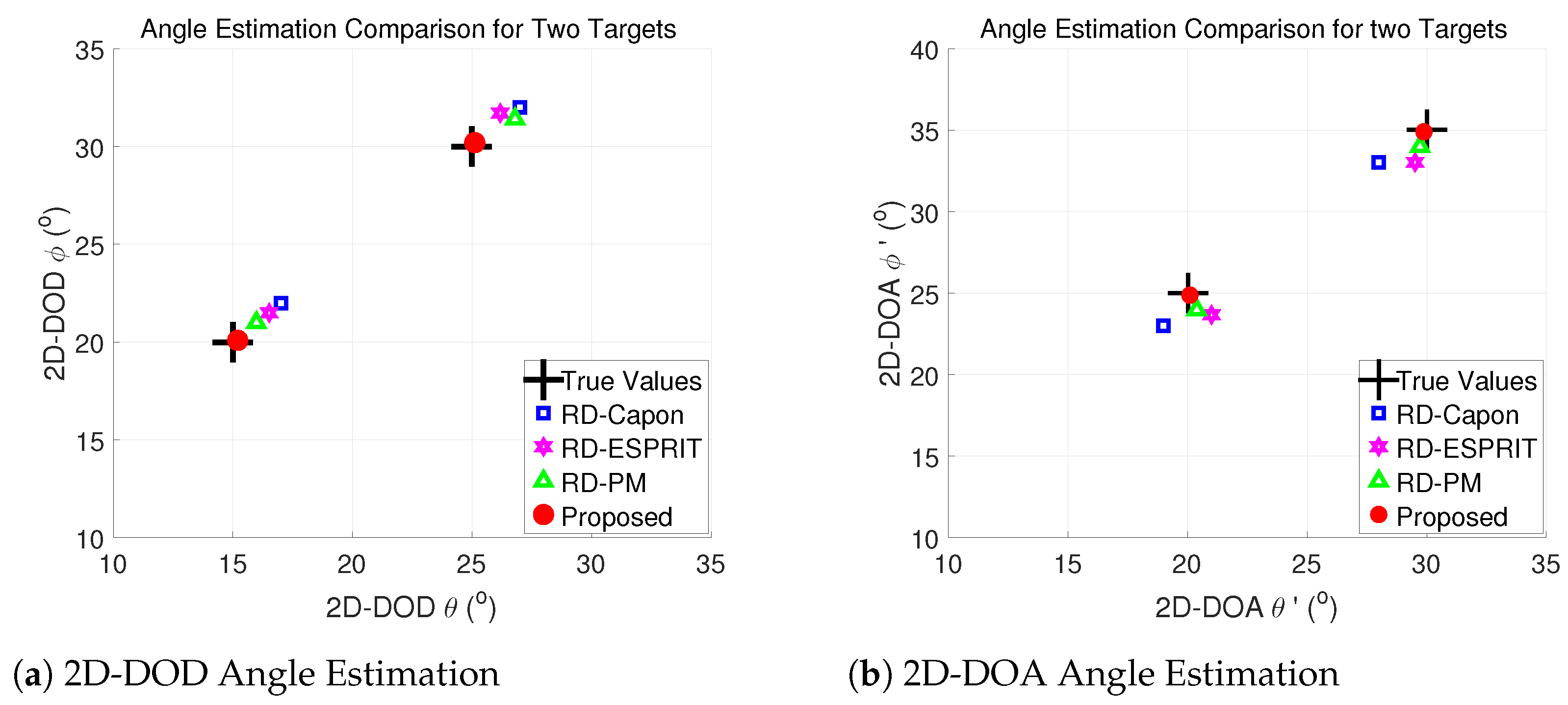
5.2. Scatter Figure
5.3. Detection Rate vs. SNR
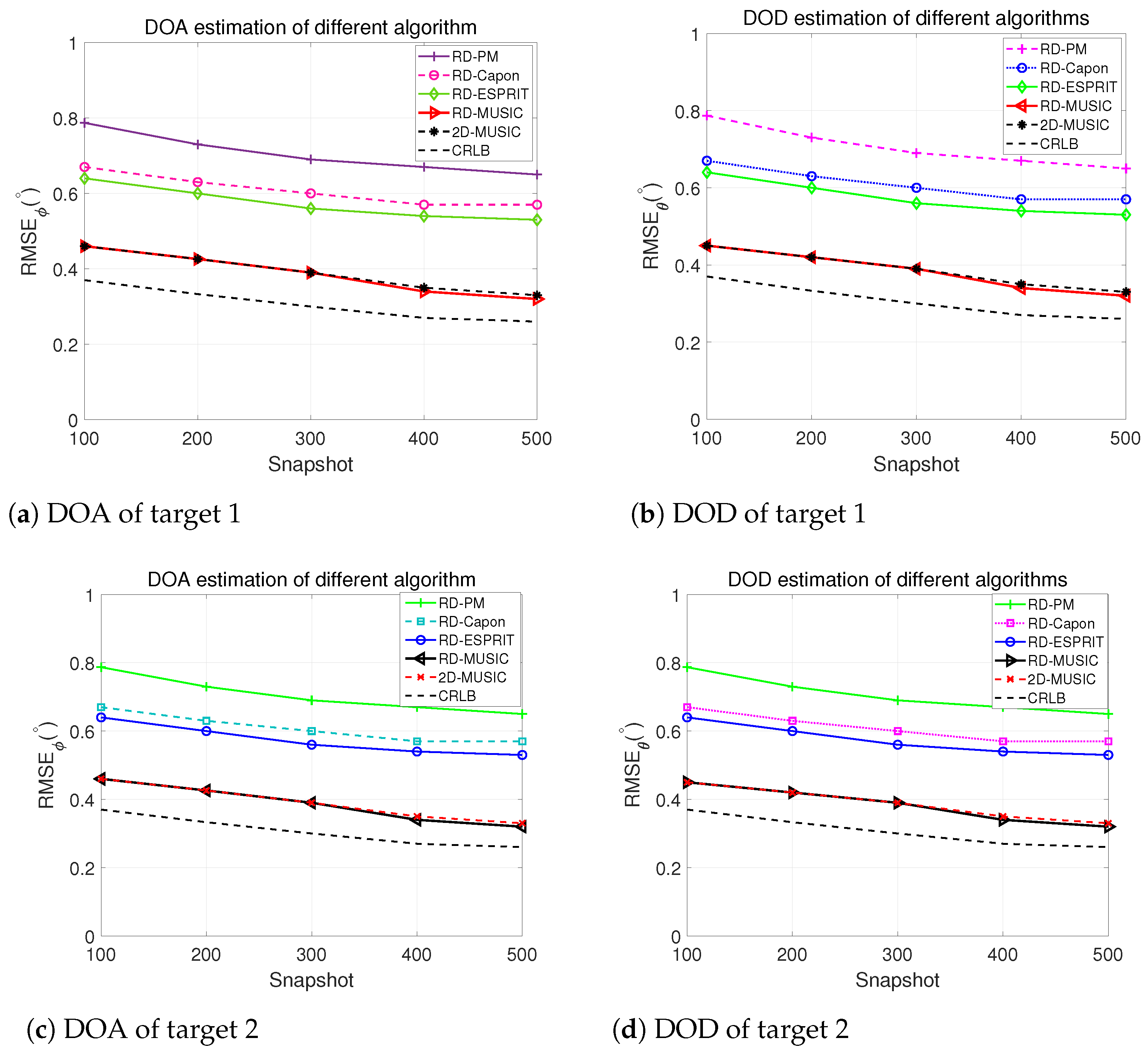
5.4. RMSE vs. Snapshot Comparison
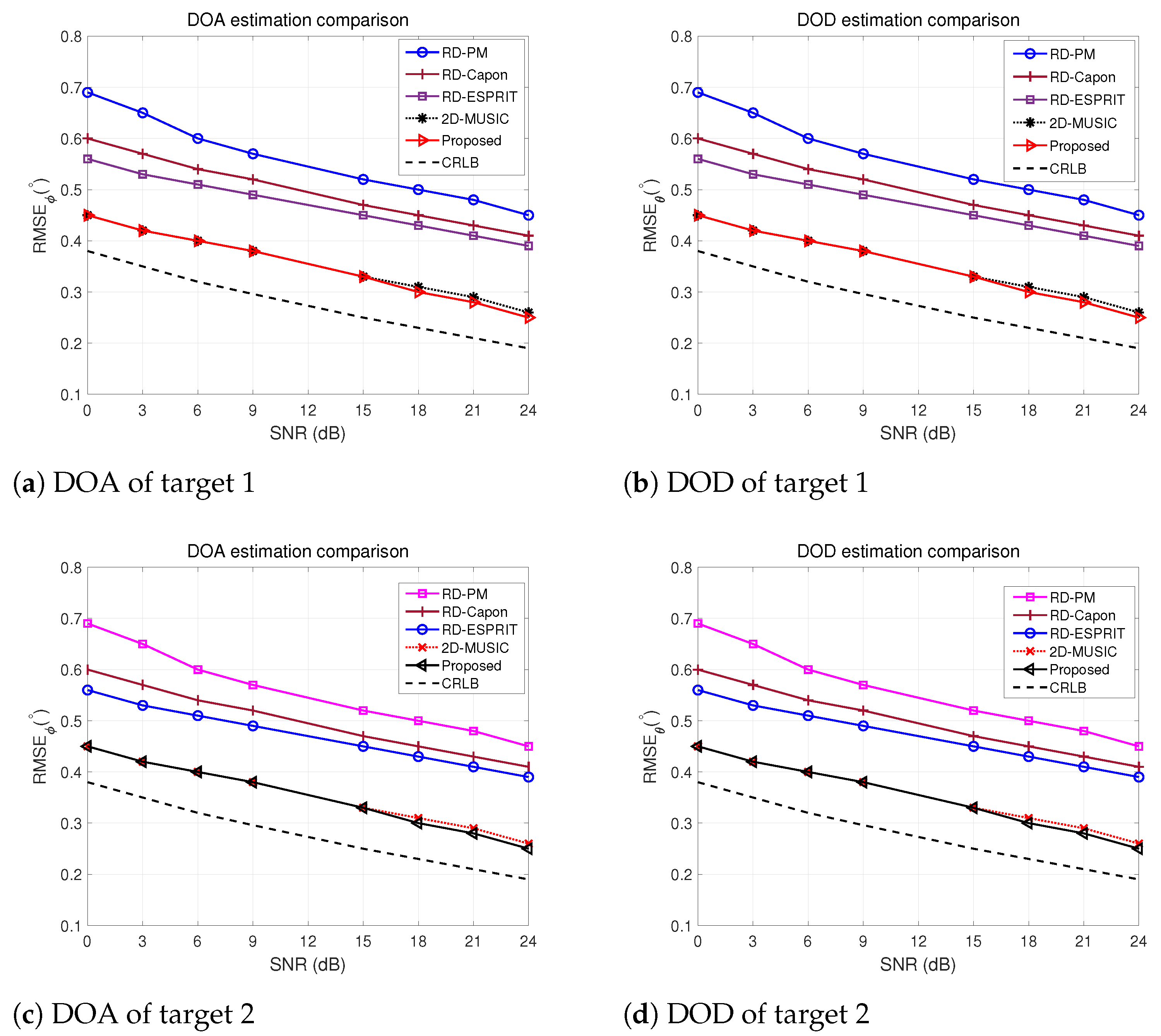
5.5. RMSE vs. SNR Comparison
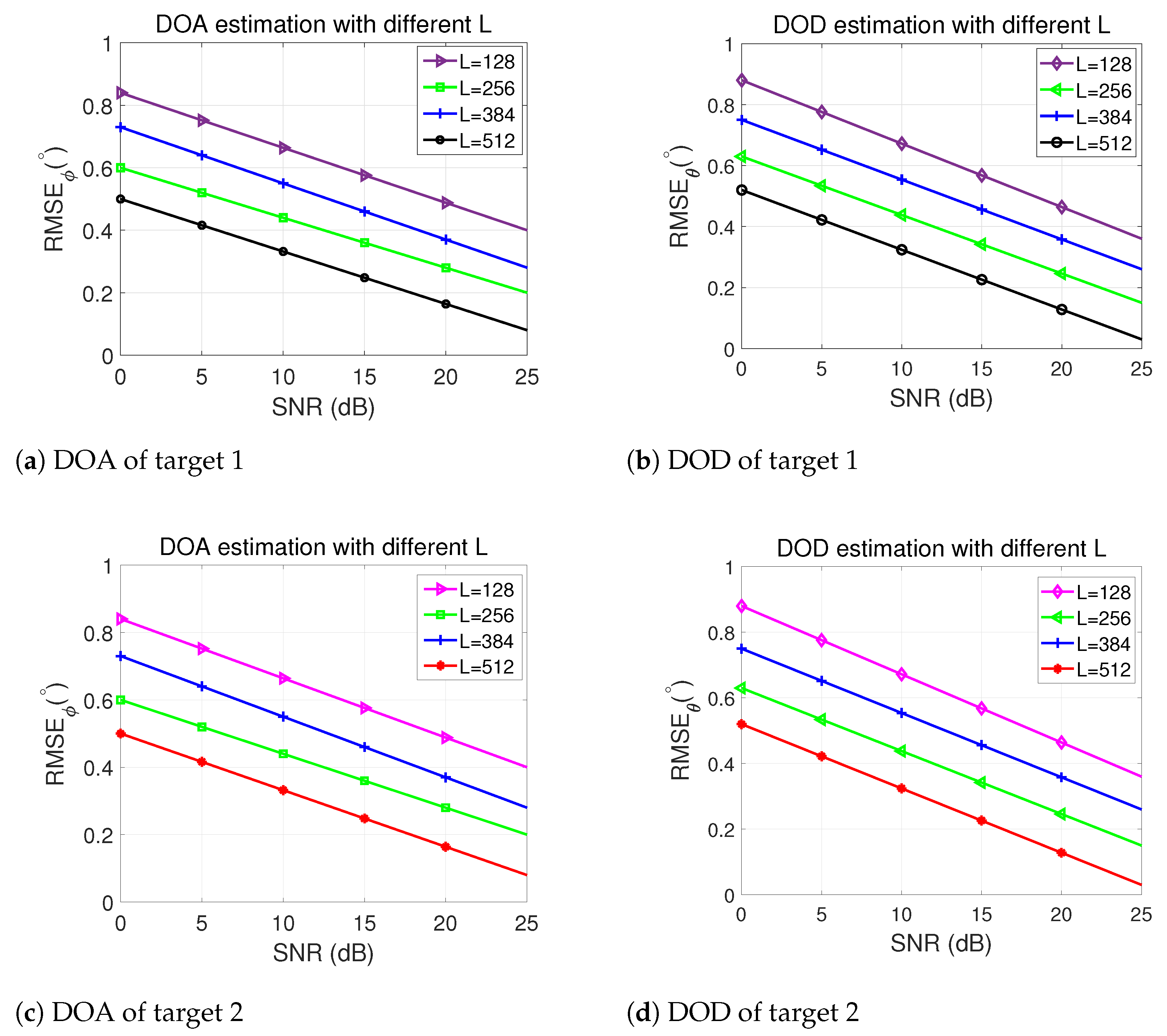
5.6. Performance Comparison with Different L
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xia, T.-Q. Joint diagonalization based 2D-DOD and 2D-DOA estimation for bistatic MIMO radar. Signal Process. 2015, 116, 7–12. [Google Scholar] [CrossRef]
- Mao, C.; Shi, J.; Wen, F. Target localization in bistatic EMVS-MIMO radar using tensor subspace method. IEEE Access 2019, 7, 163119–163127. [Google Scholar] [CrossRef]
- Xie, Q.; Pan, X.; Zhao, F. Joint 2D-DOD and 2D-DOA estimation in bistatic MIMO radar via tensor ring decomposition. IEEE Signal Process. Lett. 2023, 30, 1507–1511. [Google Scholar] [CrossRef]
- Ahmad, M.; Zhang, X.; Khoso, I.A.; Shi, X.; Qian, Y. High-Precision Iterative Preconditioned Gauss–Seidel Detection Algorithm for Massive MIMO Systems. Electronics 2022, 11, 3806. [Google Scholar] [CrossRef]
- Lai, Y.; Venturino, L.; Grossi, E.; Yi, W. Joint detection and localization in distributed MIMO radars employing waveforms with imperfect auto- and cross-correlation. IEEE Trans. Veh. Technol. 2023, 72, 16524–16537. [Google Scholar] [CrossRef]
- Han, S.; Lai, X.; Zhang, Y.; Zhang, X. A computationally efficient and virtualization-free two-dimensional DOA estimation method for nested planar array: Rd-root-MUSIC algorithm. Sensors 2022, 22, 5220. [Google Scholar] [CrossRef] [PubMed]
- Ahmad, M.; Zhang, X.; Lai, X.; Ali, F.; Shi, X. Enhanced angle estimation in MIMO radar: Combine RD-MUSIC and SDP optimization. AEUE-Int. J. Electron. Commun. 2024, 178, 155235. [Google Scholar] [CrossRef]
- Wang, X.; Huang, M.; Wan, L. Joint 2D-DOD and 2D-DOA estimation for coprime EMVS–MIMO radar. Circuits Syst. Signal Process. 2021, 40, 2950–2966. [Google Scholar] [CrossRef]
- Chintagunta, S. Joint 2D-DOA estimation of coherent targets using EV sensors in MIMO radar. Signal Process. 2022, 201, 108715. [Google Scholar] [CrossRef]
- Zhong, T.; Tao, H.; Cao, H.; Liao, H. Multi-Parameter Estimation for Monostatic FDA-MIMO Radar with Polarimetric Antenna. IEEE Trans. Antennas Propag. 2024, 72, 2524–2539. [Google Scholar] [CrossRef]
- Wang, T.; Yin, C.; Xu, D.; Hao, C.; Orlando, D.; Ricci, G. Joint Detection and Delay-Doppler Estimation Algorithms for MIMO Radars. IEEE Trans. Signal Process. 2024, 72, 809–823. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, Z.; Wang, W.-Q.; So, H.C. Joint DOD and DOA Estimation of Coherent Targets for Coprime MIMO Radar. Sensors 2023, 23, 1234. [Google Scholar] [CrossRef]
- Xu, Y.; Zheng, Z. Joint DOD and DOA Estimation for Bistatic MIMO Radar in the Presence of Unknown Mutual Coupling. Sensors 2023, 23, 567. [Google Scholar] [CrossRef]
- Gao, S.; Ma, H.; Liu, H.; Yang, Y. DOD and DOA Estimation From Incomplete Data Based on PARAFAC and Atomic Norm Minimization Method. Sensors 2023, 23, 890. [Google Scholar] [CrossRef]
- You, Z.; Hu, G.; Zhou, H.; Zheng, G. Joint Estimation Method of DOD and DOA of Bistatic Coprime Array MIMO Radar for Coherent Targets Based on Low-Rank Matrix Reconstruction. Sensors 2022, 22, 4625. [Google Scholar] [CrossRef] [PubMed]
- Hassanien, A.; Amin, M.G.; Zhang, Y.D.; Ahmad, F. Capon-based single-snapshot DOA estimation in monostatic MIMO radar. In Mobile Multimedia/Image Processing, Security, and Applications; SPIE: Wallisellen, Switzerland, 2015; Volume 9497. [Google Scholar] [CrossRef]
- Belfiori, F.; van Rossum, W.; Hoogeboom, P. 2D-MUSIC technique applied to a coherent FMCW MIMO radar. In Proceedings of the IET International Conference on Radar Systems (Radar 2012), IET, Glasgow, UK, 22–25 October 2012. [Google Scholar] [CrossRef]
- Chen, D.; Chen, B.; Qi, G. Angle estimation using ESPRIT in MIMO radar. Electron. Lett. 2008, 44, 770–771. [Google Scholar] [CrossRef]
- Zheng, Z.D.; Zhang, J.Y. Fast Method for Multi-Target Localization in Bistatic MIMO Radar. Sensors 2011, 11, 138–139. [Google Scholar] [CrossRef]
- Seo, J.; Lee, J.; Park, J.; Kim, H.; You, S. Distributed Two-Dimensional MUSIC for Joint Range and Angle Estimation with Distributed FMCW MIMO Radars. Sensors 2021, 21, 7618. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Xu, D. Angle Estimation in MIMO Radar Using Reduced-Dimension Capon. Electron. Lett. 2010, 46, 860–861. [Google Scholar] [CrossRef]
- Zhou, M.; Zhang, X.; Qiu, X.; Wang, C. Two-dimensional DOA estimation for uniform rectangular array using reduced-dimension propagator method. Int. J. Antennas Propag. 2015, 2015, 485351. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, D. Low-Complexity ESPRIT-Based DOA Estimation for Colocated MIMO Radar Using Reduced-Dimension Transformation. Electron. Lett. 2011, 47, 283–284. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, L.; Xu, L.; Xu, D. Direction of Departure (DOD) and Direction of Arrival (DOA) Estimation in MIMO Radar with Reduced-Dimension MUSIC. IEEE Commun. Lett. 2010, 14, 1161–1163. [Google Scholar] [CrossRef]
- Xu, T.; Wang, X.; Huang, M.; Lan, X.; Sun, L. Tensor-based reduced-dimension music method for parameter estimation in monostatic FDA-MIMO radar. Remote Sens. 2021, 13, 3772. [Google Scholar] [CrossRef]
- Akaike, H. A New Look at the Statistical Model Identification. IEEE Trans. Automat. Contr. 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Fishler, E.; Grosmann, M.; Messer, H. Detection of Signals by Information Theoretic Criteria: General Asymptotic Performance Analysis. IEEE Trans. Signal Process. 2002, 50, 1027–1036. [Google Scholar] [CrossRef]
- Salman, T.; Badawy, A.; Elfouly, T.M.; Mohamed, A.; Khattab, T. Estimating the Number of Sources: An Efficient Maximization Approach. In Proceedings of the 2015 International Wireless Communications and Mobile Computing Conference (IWCMC), Dubrovnik, Croatia, 24–28 August 2015; pp. 199–204. [Google Scholar] [CrossRef]
- Zhang, Y.; Ng, B.P. MUSIC-like DOA estimation without estimating the number of sources. IEEE Trans. Signal Process. 2009, 58, 1668–1676. [Google Scholar] [CrossRef]
- Jia, Y.; Zhong, X.; Guo, Y.; Huo, W. DOA and DOD estimation based on bistatic MIMO radar with co-prime array. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 394–397. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Complexity Formula |
|---|---|
| 2D-MUSIC | |
| RD-MUSIC | |
| RD-ESPRIT | |
| RD-Capon |
| Targets | Targets 1 | Targets 2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Parameters | ||||||||
| True values | 20 | 15 | 30 | 25 | 25 | 20 | 35 | 30 |
| Proposed | 20.1 | 15.2 | 30.2 | 25.1 | 24.9 | 20.1 | 34.9 | 29.9 |
| RD-Capon | 22 | 17 | 32 | 27 | 23 | 19 | 33 | 28 |
| RD-ESPRIT | 21.5 | 16.5 | 31.7 | 26.2 | 23.7 | 21 | 33 | 29.5 |
| RD-PM | 21 | 16 | 31.4 | 26.8 | 24 | 20.1 | 34 | 29.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmad, M.; Zhang, X.; Lai, X.; Ali, F.; Shi, X. Low-Complexity 2D-DOD and 2D-DOA Estimation in Bistatic MIMO Radar Systems: A Reduced-Dimension MUSIC Algorithm Approach. Sensors 2024, 24, 2801. https://doi.org/10.3390/s24092801
Ahmad M, Zhang X, Lai X, Ali F, Shi X. Low-Complexity 2D-DOD and 2D-DOA Estimation in Bistatic MIMO Radar Systems: A Reduced-Dimension MUSIC Algorithm Approach. Sensors. 2024; 24(9):2801. https://doi.org/10.3390/s24092801
Chicago/Turabian StyleAhmad, Mushtaq, Xiaofei Zhang, Xin Lai, Farman Ali, and Xinlei Shi. 2024. "Low-Complexity 2D-DOD and 2D-DOA Estimation in Bistatic MIMO Radar Systems: A Reduced-Dimension MUSIC Algorithm Approach" Sensors 24, no. 9: 2801. https://doi.org/10.3390/s24092801
APA StyleAhmad, M., Zhang, X., Lai, X., Ali, F., & Shi, X. (2024). Low-Complexity 2D-DOD and 2D-DOA Estimation in Bistatic MIMO Radar Systems: A Reduced-Dimension MUSIC Algorithm Approach. Sensors, 24(9), 2801. https://doi.org/10.3390/s24092801