
Multistatic Integrated Sensing and Communication System Based on Macro–Micro Cooperation

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
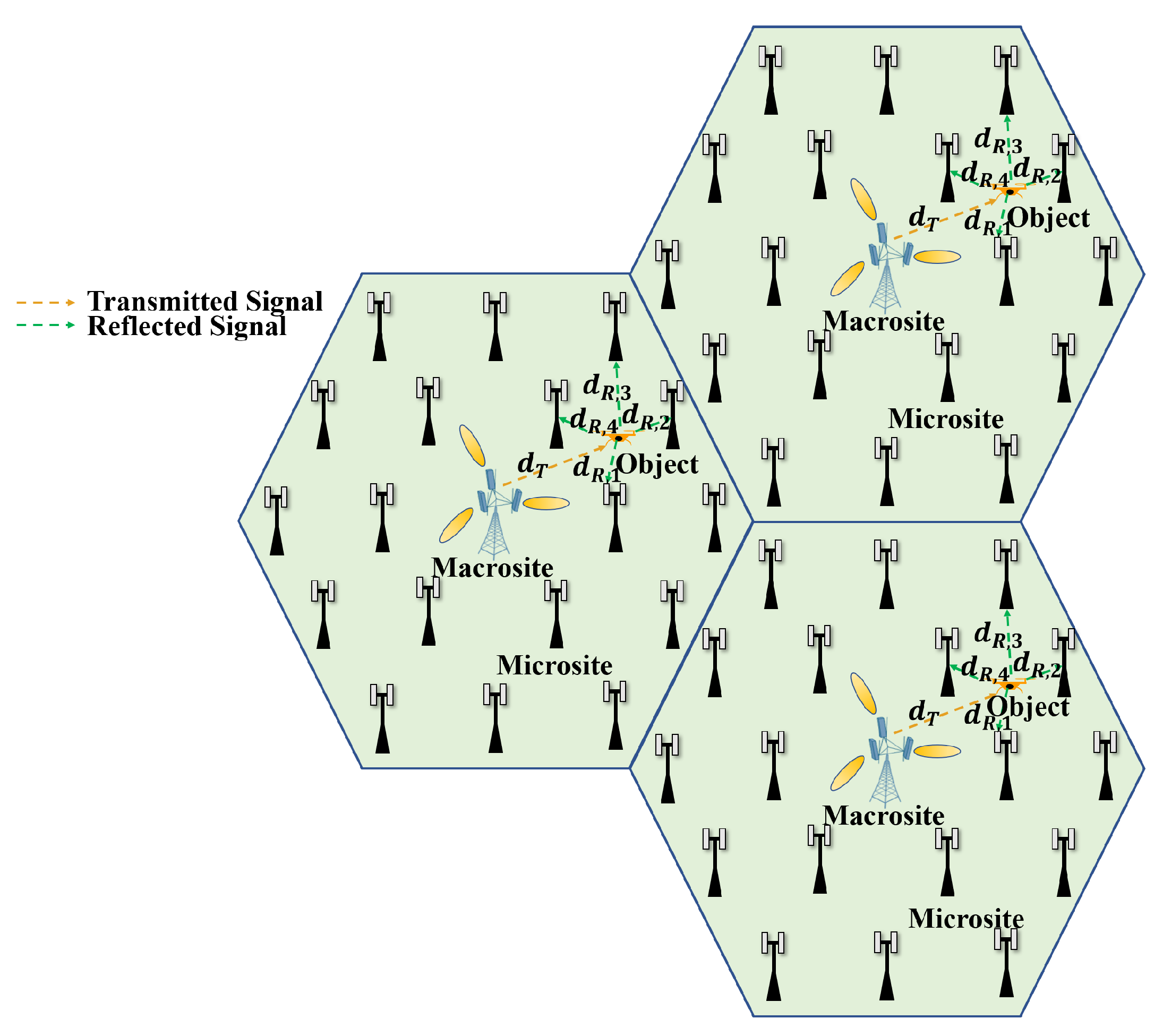
- A multistatic ISAC system with macro–micro cooperation is proposed. The proposed system makes use of flexibly deployed microsites to perform multistatic sensing with the macrosite within the cell.
- (2)
- The deployment of microsites within the macrosite cell is investigated in terms of the channel gain for cooperative sensing.
- (3)
- An efficient approach with joint data optimization for estimating the position and velocity of sensing objects in three-dimensional (3D) environments is described.
- (4)
- The effectiveness of the proposed multistatic ISAC system is demonstrated by simulating the estimation errors for position and velocity. It is shown that the multistatic ISAC system using macro–micro cooperation can effectively improve object estimation accuracy compared to systems using macrosite cooperation alone. The microsite configuration with high-cost performance is also provided.
2. System Model
2.1. Multistatic ISAC System
2.2. Macro–Micro Cooperation
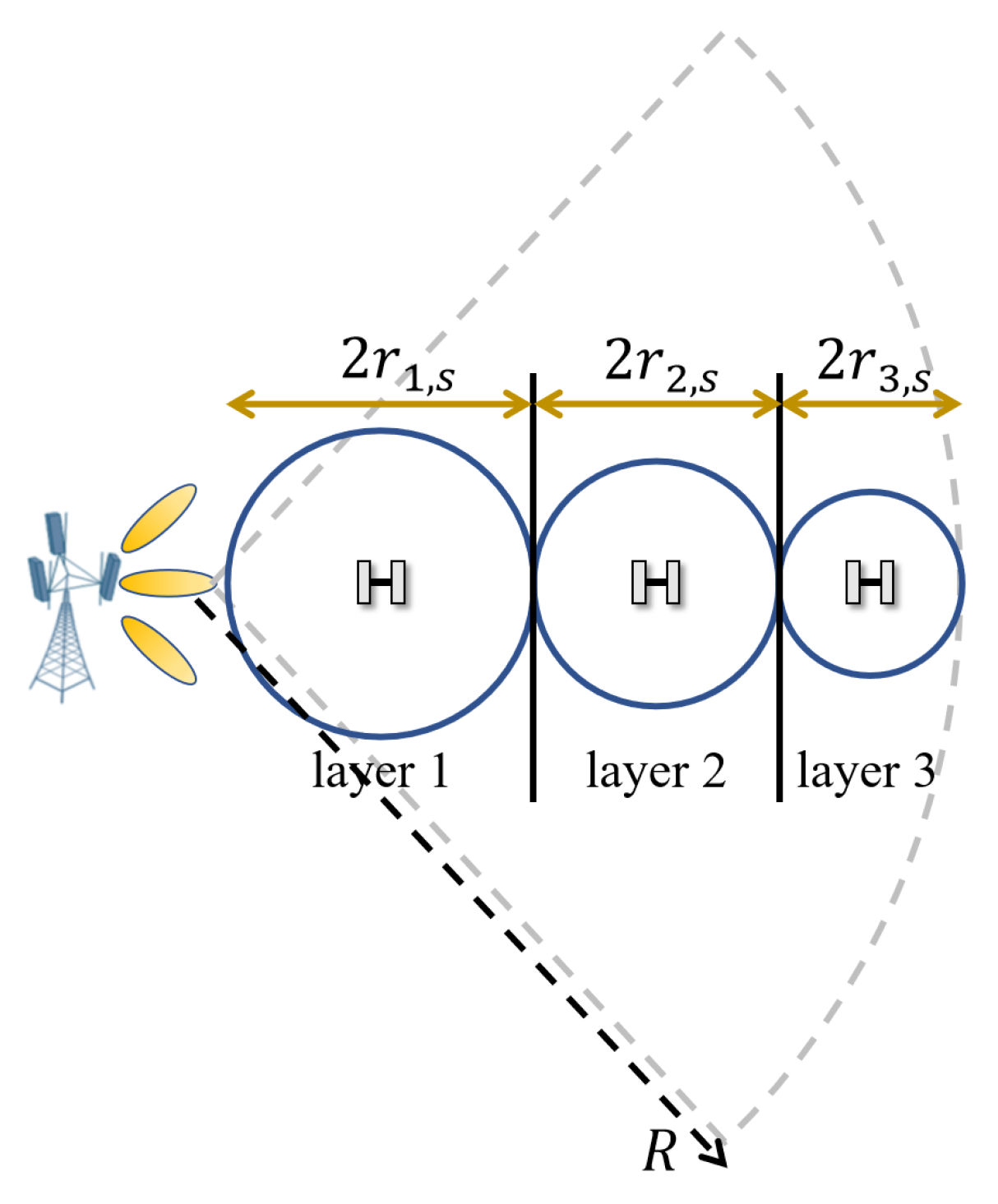
3. Microsite Deployment
3.1. Deployment in Distance Domain
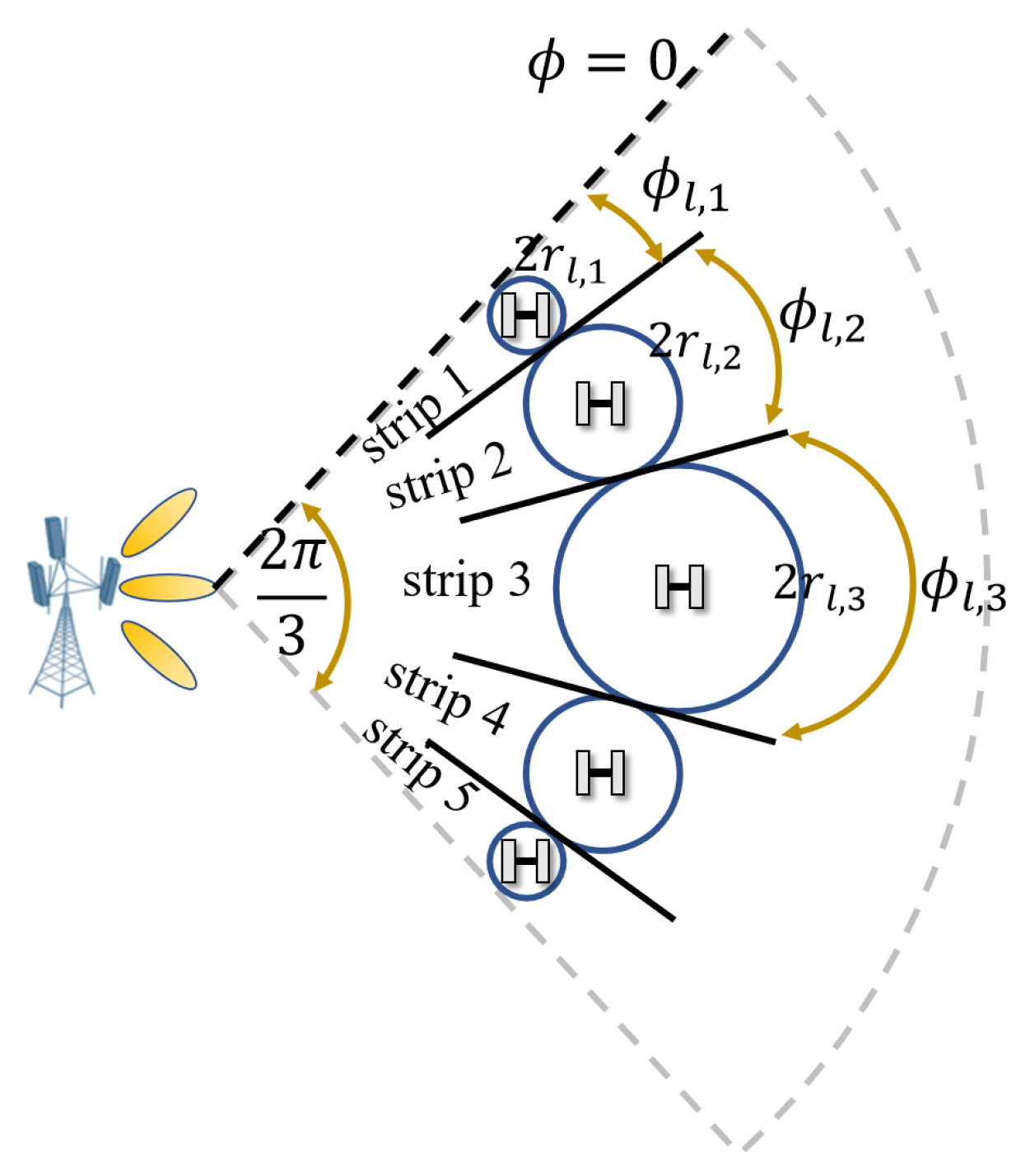
3.2. Deployment in Angular Domain
3.3. Overall Algorithm
| Algorithm 1 The overall algorithm for microsite deployment. |
Input: , , R, ; 1: Initialization: , , ; 2: Find by (10); 3: While (15) is not satisfied ; 4: Find by (14); 5: end While 6: Find by (16); 7: ; 8: for 9: ; 10: While (20) is not satisfied ; 11: Find by (19); 12: end While 14: end for Output: L, , , , for and ; |
4. Multistatic Sensing
4.1. Channel Parameter Estimation
4.2. Position and Velocity Estimation
4.2.1. Position Estimation
4.2.2. Velocity Estimation
| Algorithm 2 The optimization method for position and velocity estimation. |
Input: , , , , ; 1: Find using (36); 2: Find , , and using and ; 3: Find using (33); 4: Find , , , , , and using in step 3; 6: Find using (41); Output: and ; |
5. Simulation Results
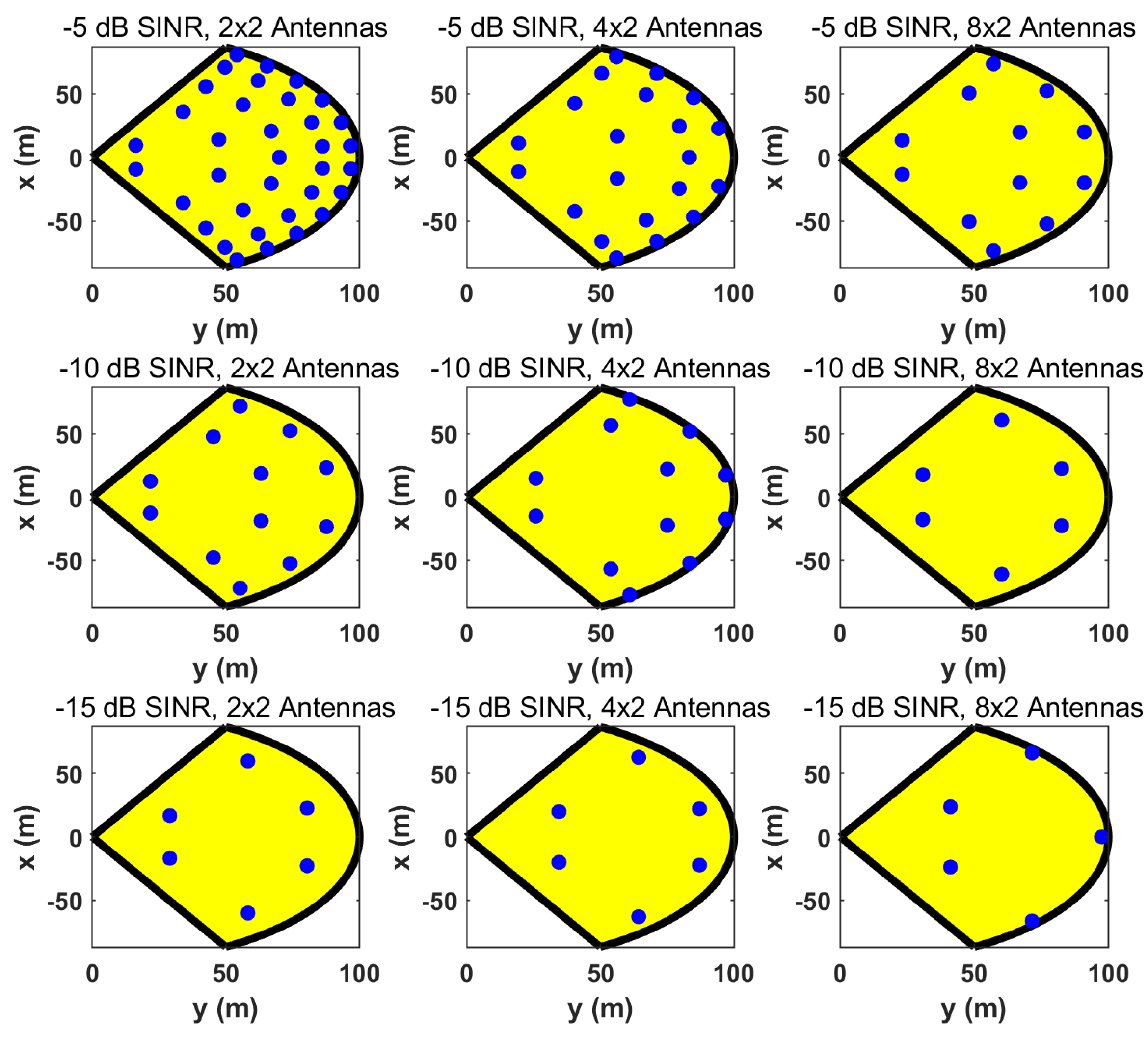
5.1. Microsite Deployment
5.2. Multistatic Sensing Performance
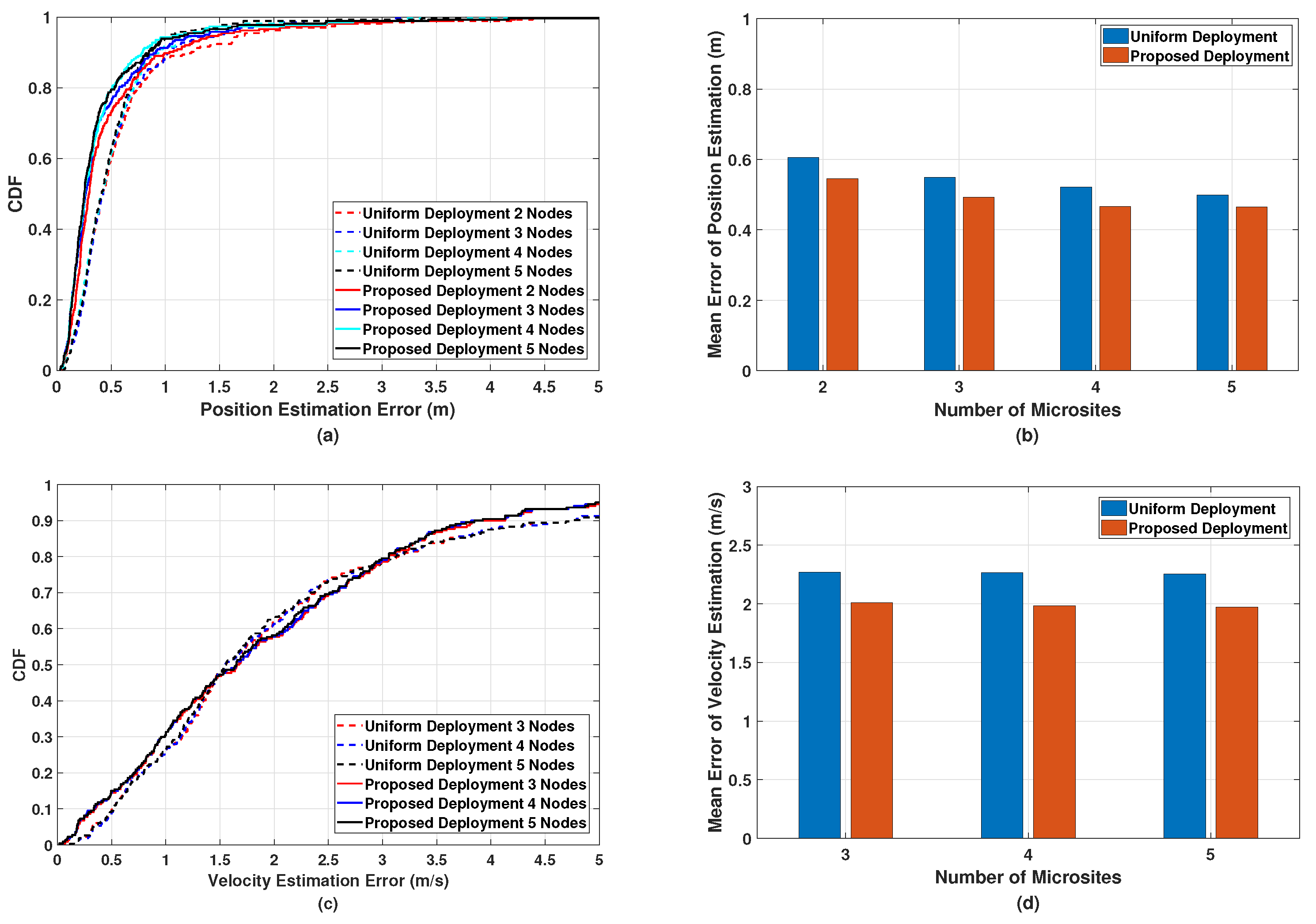
5.3. Comparison with Uniform Deployment
6. Discussion
6.1. Alternatives to Sensing Receivers
- (1)
- A CST is a passive sensing receiver that can be exclusively used for sensing. Therefore, it cannot act as a transmitter for communication functions when the sensing service is not activated, leading to wasted hardware resources. On the other hand, although the hardware cost of CSTs is lower than that of microsites, both CSTs and microsites require low-latency links, such as optical fiber, for connection to the macrosites [5]. Therefore, the construction cost for CSTs is close to that for microsites. To sum up, CSTs have the potential to take the place of microsites in multistatic ISAC systems by saving hardware costs at the expense of communication functions. This tradeoff needs to be considered in practical deployments, while the deployment analysis described in Section 3 can be directly applied to multistatic ISAC systems with CSTs.
- (2)
- UE is also an alternative to a sensing receiver. Mobile or UE-based sensing offers advantages in system extensibility, deployment cost, and implementation flexibility [43,44]. Specifically, the density of UE is much higher than that of microsites, making it more convenient to select UE closest to the targeted sensing area, while using UE as a sensing receiver almost eliminates the hardware cost for operators. However, some critical issues may arise when considering a multistatic ISAC system with UE. One issue is the synchronization between the macrosite and UE. It should be noted that a synchronization error of a few nanoseconds results in a positioning error of several meters. Therefore, difficult but stringent time and frequency offset calibrations are required. Another issue is that UE positions can drastically change, resulting in poor sensing performance. In addition, additional permission from users is needed to activate the sensing function, which may not be desired by operators. To conclude, although UE offers advantages in cost and density, some extra problems need to be addressed to improve the performance of the multistatic ISAC system.
6.2. Challenges
6.2.1. Interference
6.2.2. Practical Implementation
6.2.3. Power Consumption
7. Conclusions and Future Work
7.1. Conclusions
7.2. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Xiao, Y.; Ma, Z.; Xiao, M.; Ding, Z.; Lei, X.; Karagiannidis, G.K.; Fan, P. 6G wireless networks: Vision, requirements, architecture, and key technologies. IEEE Veh. Technol. Mag. 2019, 14, 28–41. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2020, 34, 134–142. [Google Scholar] [CrossRef]
- Jiang, W.; Han, B.; Habibi, M.A.; Schotten, H.D. The road towards 6G: A comprehensive survey. IEEE Open J. Commun. Soc. 2021, 2, 334–366. [Google Scholar] [CrossRef]
- Zhang, A.; Rahman, M.L.; Huang, X.; Guo, Y.J.; Chen, S.; Heath, R.W. Perceptive mobile networks: Cellular networks with radio vision via joint communication and radar sensing. IEEE Veh. Technol. Mag. 2020, 16, 20–30. [Google Scholar] [CrossRef]
- Xie, L.; Song, S.; Eldar, Y.C.; Letaief, K.B. Collaborative sensing in perceptive mobile networks: Opportunities and challenges. IEEE Wirel. Commun. 2023, 30, 16–23. [Google Scholar] [CrossRef]
- Wang, X.; Fei, Z.; Wu, Q. Integrated Sensing and Communication for RIS-Assisted Backscatter Systems. IEEE Internet Things J. 2023, 10, 13716–13726. [Google Scholar] [CrossRef]
- Du, J.; Cheng, Y.; Jin, L.; Li, S.; Gao, F. Nested tensor-based integrated sensing and communication in RIS-assisted THz MIMO systems. IEEE Trans. Signal Process. 2024, 72, 1141–1157. [Google Scholar] [CrossRef]
- Han, C.; Wu, Y.; Chen, Z.; Chen, Y.; Wang, G. THz ISAC: A physical-layer perspective of Terahertz integrated sensing and communication. IEEE Commun. Mag. 2024, 62, 102–108. [Google Scholar] [CrossRef]
- Lyu, W.; Yang, S.; Xiu, Y.; Li, Y.; He, H.; Yuen, C.; Zhang, Z. CRB Minimization for RIS-aided mmWave integrated sensing and communications. IEEE Internet Things J. 2024. [Google Scholar] [CrossRef]
- Chen, Y.; Hua, H.; Xu, J.; Ng, D.W.K. ISAC meets SWIPT: Multi-functional wireless systems integrating sensing, communication, and powering. IEEE Trans. Wirel. Commun. 2024. [Google Scholar] [CrossRef]
- Yin, L.; Liu, Z.; Bhavani Shankar, M.R.; Alaee-Kerahroodi, M.; Clerckx, B. Integrated sensing and communications enabled low earth orbit satellite systems. IEEE Netw. 2024. [Google Scholar] [CrossRef]
- Cui, Y.; Liu, F.; Jing, X.; Mu, J. Integrating sensing and communications for ubiquitous IoT: Applications, trends, and challenges. IEEE Netw. 2021, 35, 158–167. [Google Scholar] [CrossRef]
- Liu, F.; Cui, Y.; Masouros, C.; Xu, J.; Han, T.X.; Eldar, Y.C.; Buzzi, S. Integrated sensing and communications: Towards dual-functional wireless networks for 6G and beyond. IEEE J. Sel. Areas Commun. 2022, 40, 1728–1767. [Google Scholar] [CrossRef]
- Hua, H.; Xu, J.; Han, T.X. Optimal transmit beamforming for integrated sensing and communication. IEEE Trans. Veh. Technol. 2023, 72, 10588–10603. [Google Scholar] [CrossRef]
- Zou, J.; Sun, S.; Masouros, C.; Cui, Y.; Liu, Y.F.; Ng, D.W.K. Energy-efficient beamforming design for integrated sensing and communications systems. IEEE Trans. Commun. 2024. [Google Scholar] [CrossRef]
- Wang, X.; Fei, Z.; Zhang, J.A.; Huang, J. Sensing-assisted secure uplink communications with full-duplex base station. IEEE Commun. Lett. 2021, 26, 249–253. [Google Scholar] [CrossRef]
- Liu, F.; Yuan, W.; Masouros, C.; Yuan, J. Radar-assisted predictive beamforming for vehicular links: Communication served by sensing. IEEE Trans. Wirel. Commun. 2020, 19, 7704–7719. [Google Scholar] [CrossRef]
- Li, J.; Zhou, G.; Gong, T.; Liu, N. A framework for mutual information-based MIMO integrated sensing and communication beamforming design. IEEE Trans. Veh. Technol. 2024. [Google Scholar] [CrossRef]
- Lu, S.; Liu, F.; Hanzo, L. The degrees-of-freedom in monostatic ISAC channels: NLoS exploitation vs. reduction. IEEE Trans. Veh. Technol. 2022, 72, 2643–2648. [Google Scholar] [CrossRef]
- Luo, H.; Gao, F.; Liu, F.; Jin, S. 6D radar sensing and tracking in monostatic integrated sensing and communications system. arXiv 2023, arXiv:2312.16441. [Google Scholar]
- Barneto, C.B.; Riihonen, T.; Turunen, M.; Anttila, L.; Fleischer, M.; Stadius, K.; Ryynänen, J.; Valkama, M. Full-duplex OFDM radar with LTE and 5G NR waveforms: Challenges, solutions, and measurements. IEEE Trans. Microw. Theory Tech. 2019, 67, 4042–4054. [Google Scholar] [CrossRef]
- Li, S.; Murch, R.D. An investigation into baseband techniques for single-channel full-duplex wireless communication systems. IEEE Trans. Wirel. Commun. 2014, 13, 4794–4806. [Google Scholar] [CrossRef]
- Tang, A.; Li, S.; Wang, X. Self-interference-resistant IEEE 802.11ad-based joint communication and automotive radar design. IEEE J. Sel. Top. Signal Process. 2021, 15, 1484–1499. [Google Scholar] [CrossRef]
- Roberts, I.P.; Chopra, A.; Novlan, T.; Vishwanath, S.; Andrews, J.G. Beamformed Self-Interference Measurements at 28 GHz: Spatial Insights and Angular Spread. IEEE Trans. Wirel. Commun. 2022, 21, 9744–9760. [Google Scholar] [CrossRef]
- Cui, C.; Xu, J.; Gui, R.; Wang, W.Q.; Wu, W. Search-free DOD, DOA and range estimation for bistatic FDA-MIMO radar. IEEE Access 2018, 6, 15431–15445. [Google Scholar] [CrossRef]
- Leyva, L.; Castanheira, D.; Silva, A.; Gameiro, A.; Hanzo, L. Cooperative multiterminal radar and communication: A new paradigm for 6G mobile networks. IEEE Veh. Technol. Mag. 2021, 16, 38–47. [Google Scholar] [CrossRef]
- Leyva, L.; Castanheira, D.; Silva, A.; Gameiro, A. Two-stage estimation algorithm based on interleaved OFDM for a cooperative bistatic ISAC scenario. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference: (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–6. [Google Scholar]
- Pucci, L.; Matricardi, E.; Paolini, E.; Xu, W.; Giorgetti, A. Performance analysis of a bistatic joint sensing and communication system. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 73–78. [Google Scholar]
- Pucci, L.; Paolini, E.; Giorgetti, A. System-level analysis of joint sensing and communication based on 5G new radio. IEEE J. Sel. Areas Commun. 2022, 40, 2043–2055. [Google Scholar] [CrossRef]
- Willis, N.J. Bistatic Radar; SciTech Publishing: Raleigh, NC, USA, 2005; Volume 2. [Google Scholar]
- Kanhere, O.; Goyal, S.; Beluri, M.; Rappaport, T.S. Target localization using bistatic and multistatic radar with 5G NR waveform. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; pp. 1–7. [Google Scholar]
- Han, Z.; Han, L.; Zhang, X.; Wang, Y.; Ma, L.; Lou, M.; Jin, J.; Liu, G. Multistatic integrated sensing and communication system in cellular networks. arXiv 2023, arXiv:2305.12994. [Google Scholar]
- Han, Z.; Ding, H.; Zhang, X.; Wang, Y.; Lou, M.; Jin, J.; Wang, Q.; Liu, G. Multistatic integrated sensing and communication system in cellular networks. In Proceedings of the 2023 IEEE Globecom Workshops (GC Wkshps), Kuala Lumpur, Malaysia, 4–8 December 2023; pp. 123–128. [Google Scholar]
- Li, R.; Xiao, Z.; Zeng, Y. Beamforming towards seamless sensing coverage for cellular integrated sensing and communication. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 492–497. [Google Scholar]
- Li, R.; Xiao, Z.; Zeng, Y. Towards seamless sensing coverage for cellular multi-Static integrated sensing and communication. IEEE Trans. Wirel. Commun. 2023. [Google Scholar] [CrossRef]
- Zhu, H.; Wang, J. Chunk-based resource allocation in OFDMA systems Part I: Chunk allocation. IEEE Trans. Commun. 2009, 57, 2734–2744. [Google Scholar]
- Zhu, H.; Wang, J. Chunk-based resource allocation in OFDMA systems Part II: Joint chunk, power and bit Allocation. IEEE Trans. Commun. 2012, 60, 499–509. [Google Scholar] [CrossRef]
- Sturm, C.; Wiesbeck, W. Waveform design andsignal processing aspects for fusion of wireless communications and radar sensing. Proc. IEEE 2011, 99, 1236–1259. [Google Scholar] [CrossRef]
- Zheng, J.; Chu, P.; Wang, X.; Yang, Z. Inner-frame time division multiplexing waveform design of integrated sensing and communication in 5G NR system. Sensors 2023, 23, 6855. [Google Scholar] [CrossRef]
- Gu, J.F.; Moghaddasi, J.; Wu, K. Delay and Doppler shift estimation for OFDM-based radar-radio (RadCom) system. In Proceedings of the 2015 IEEE International Wireless Symposium (IWS 2015), Shenzhen, China, 30 March–1 April 2015; pp. 1–4. [Google Scholar]
- Gill, P.E.; Murray, W. Quasi-Newton methods for unconstrained optimization. IMA J. Appl. Math. 1972, 9, 91–108. [Google Scholar] [CrossRef]
- 3GPP. Radio Frequency (RF) and co-existence aspects. In 3GPP Technical Specification TS 38.803. 2022. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3069 (accessed on 18 March 2024).
- Yang, Y.; Zhang, B.; Guo, D.; Xu, R.; Wang, W.; Xiong, Z.; Niyato, D. Semantic sensing performance analysis: Assessing keyword coverage in text data. IEEE Trans. Veh. Technol. 2023, 72, 15133–15137. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, B.; Guo, D.; Xu, R.; Kumar, N.; Wang, W. Mean field game and broadcast encryption-based joint data freshness optimization and pPrivacy pPreservation for mobile crowdsensing. IEEE Trans. Veh. Technol. 2023, 72, 14860–14874. [Google Scholar]
- Han, Z.; Shen, S.; Zhang, Y.; Tang, S.; Chiu, C.Y.; Murch, R. Single-RF MIMO-OFDM using ESPAR. IEEE Trans. Veh. Technol. 2023, 72, 6080–6089. [Google Scholar] [CrossRef]
- Han, Z.; Shen, S.; Zhang, Y.; Tang, S.; Chiu, C.Y.; Murch, R. Spectrally efficient pulse shaping for beamspace space shift keying in Single-RF ESPAR systems. IEEE Trans. Veh. Technol. 2023, 72, 10548–10560. [Google Scholar] [CrossRef]
- Tang, Q.; Xie, R.; Fang, Z.; Huang, T.; Chen, T.; Zhang, R.; Yu, F.R. Joint service deployment and task scheduling for satellite edge computing: A two-timescale hierarchical approach. IEEE J. Sel. Areas Commun. 2024. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Han, Z.; Jin, J.; Xi, R.; Wang, Y.; Han, L.; Ma, L.; Lou, M.; Gui, X.; Wang, Q.; et al. Multistatic Integrated Sensing and Communication System Based on Macro–Micro Cooperation. Sensors 2024, 24, 2498. https://doi.org/10.3390/s24082498
Wang X, Han Z, Jin J, Xi R, Wang Y, Han L, Ma L, Lou M, Gui X, Wang Q, et al. Multistatic Integrated Sensing and Communication System Based on Macro–Micro Cooperation. Sensors. 2024; 24(8):2498. https://doi.org/10.3390/s24082498
Chicago/Turabian StyleWang, Xiaoyun, Zixiang Han, Jing Jin, Rongyan Xi, Yajuan Wang, Lincong Han, Liang Ma, Mengting Lou, Xin Gui, Qixing Wang, and et al. 2024. "Multistatic Integrated Sensing and Communication System Based on Macro–Micro Cooperation" Sensors 24, no. 8: 2498. https://doi.org/10.3390/s24082498
APA StyleWang, X., Han, Z., Jin, J., Xi, R., Wang, Y., Han, L., Ma, L., Lou, M., Gui, X., Wang, Q., & Liu, G. (2024). Multistatic Integrated Sensing and Communication System Based on Macro–Micro Cooperation. Sensors, 24(8), 2498. https://doi.org/10.3390/s24082498