
Replicating Spectral Baseline for Unambiguous Frequency Locking in Resonant Sensors



Abstract
1. Introduction
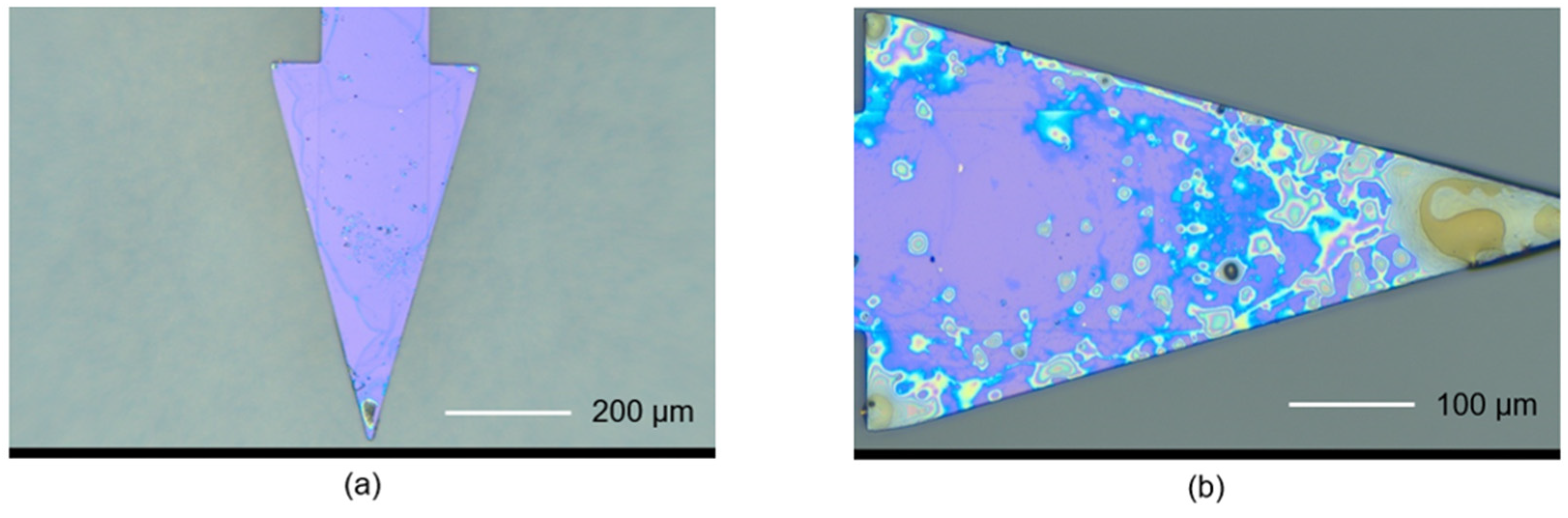
2. Electrothermal-Piezoresistive-Cantilever Sensor
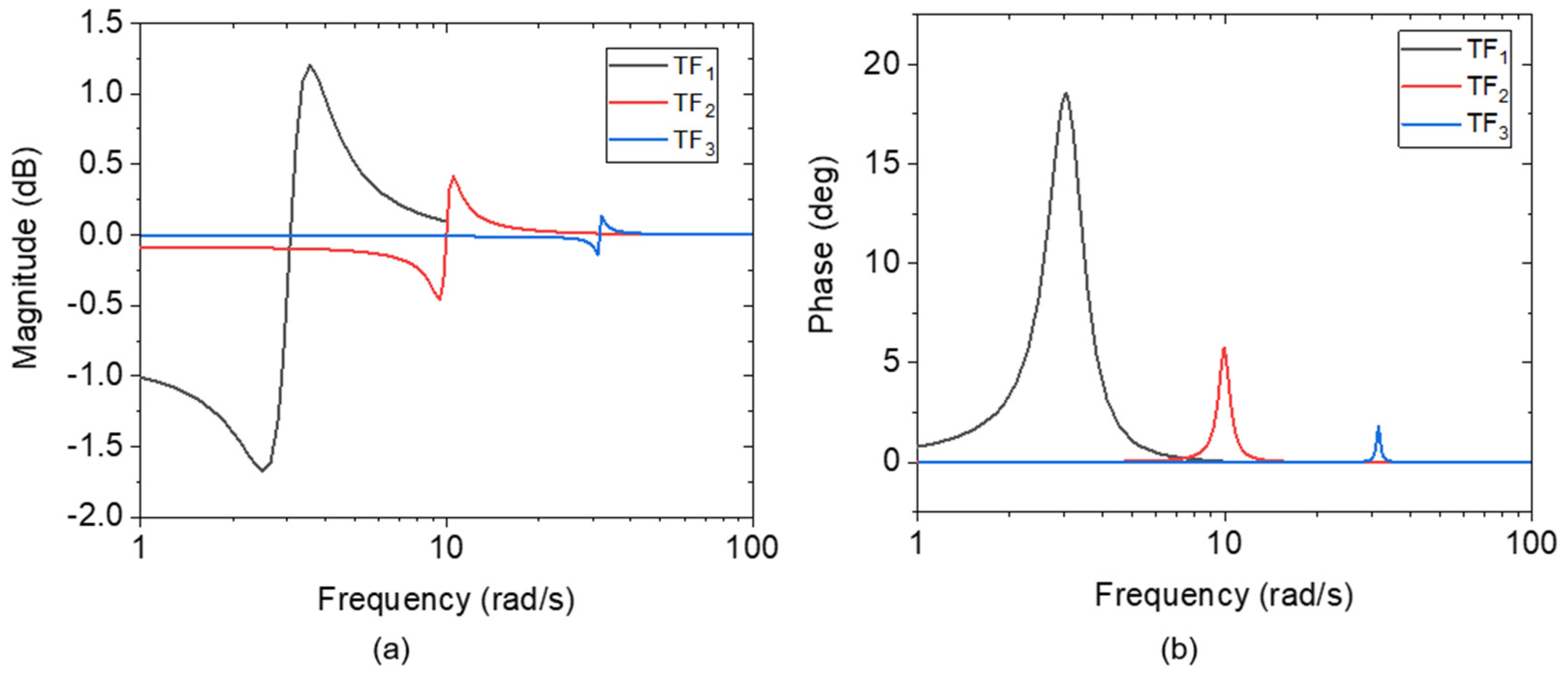
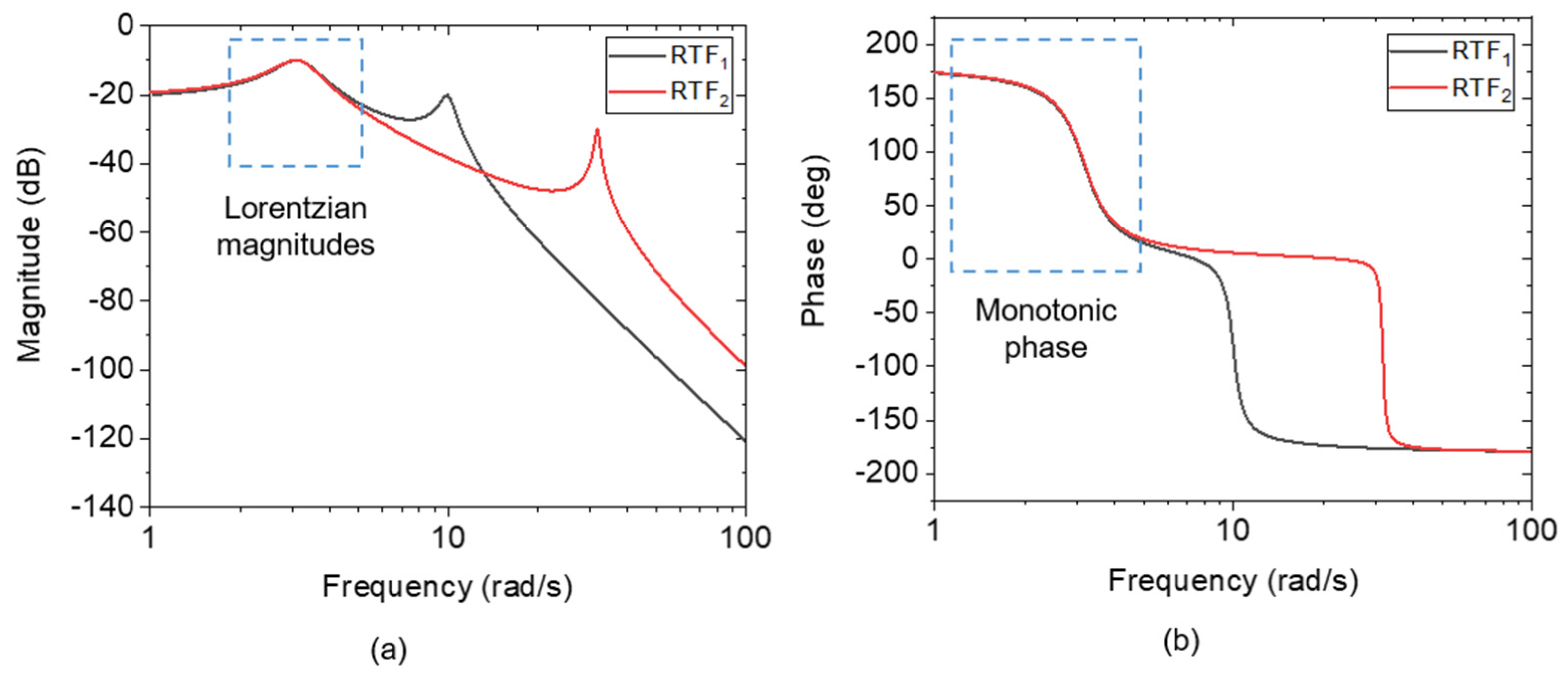
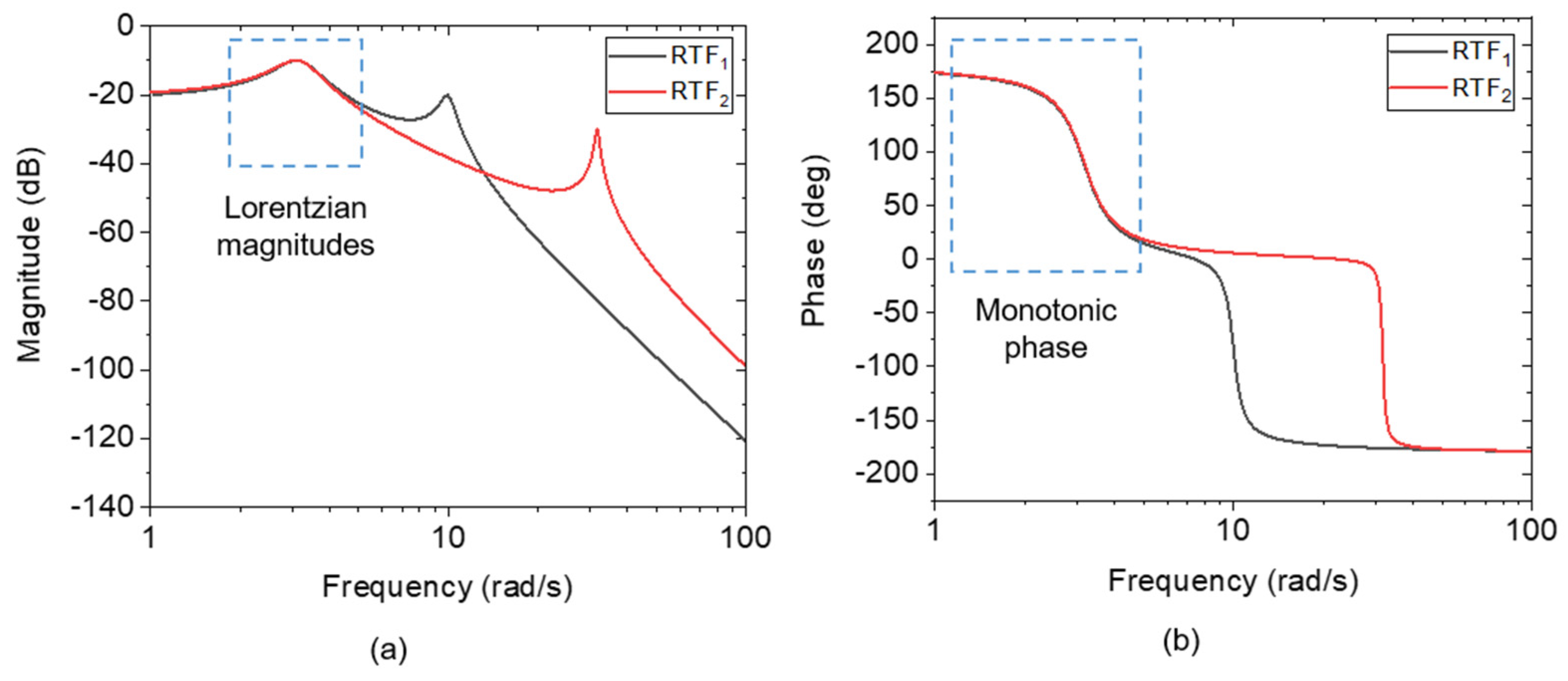
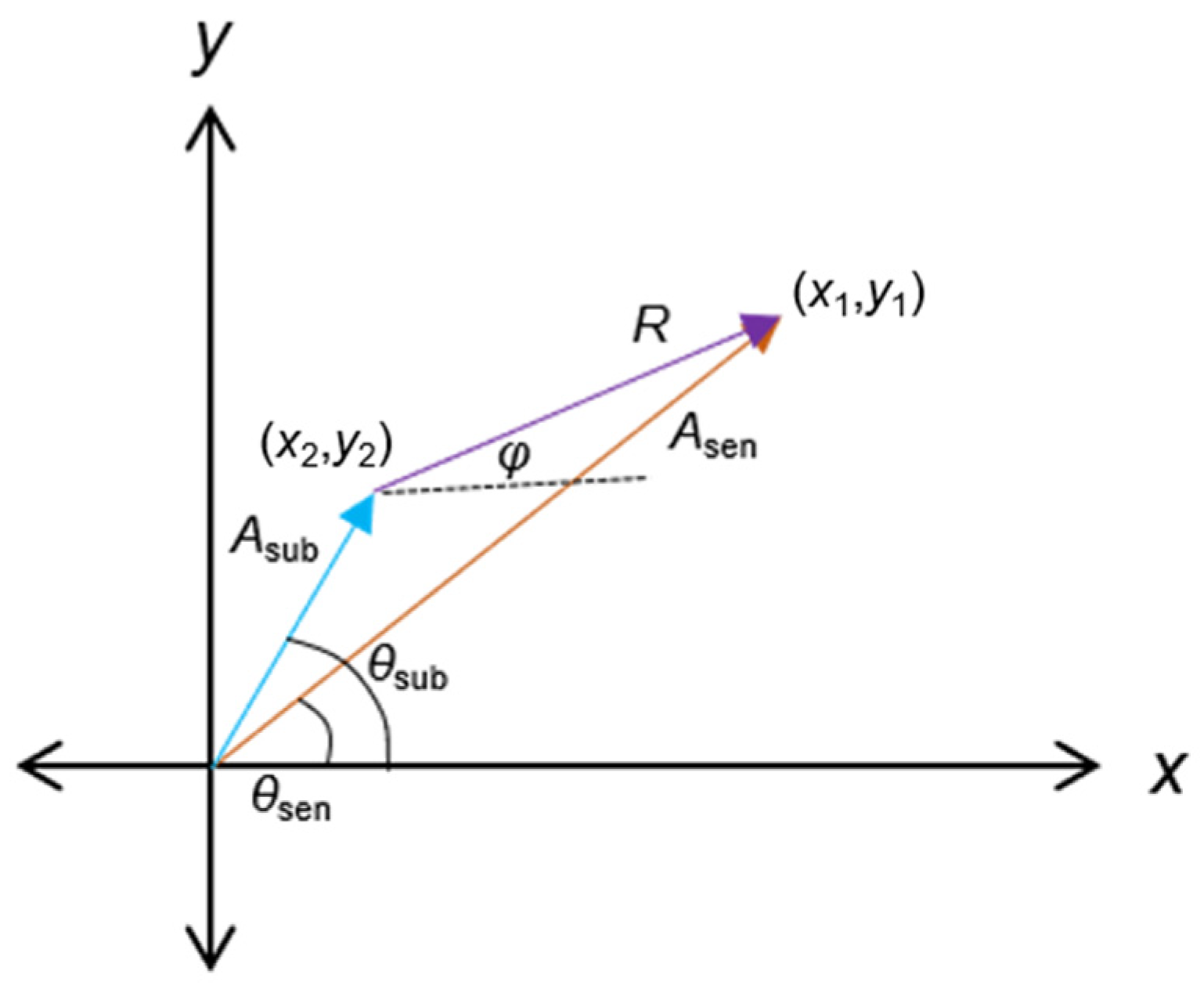
3. Resonant Frequency Transfer Function Analysis
4. Spectral Response Optimization Method and Experimental Evaluation
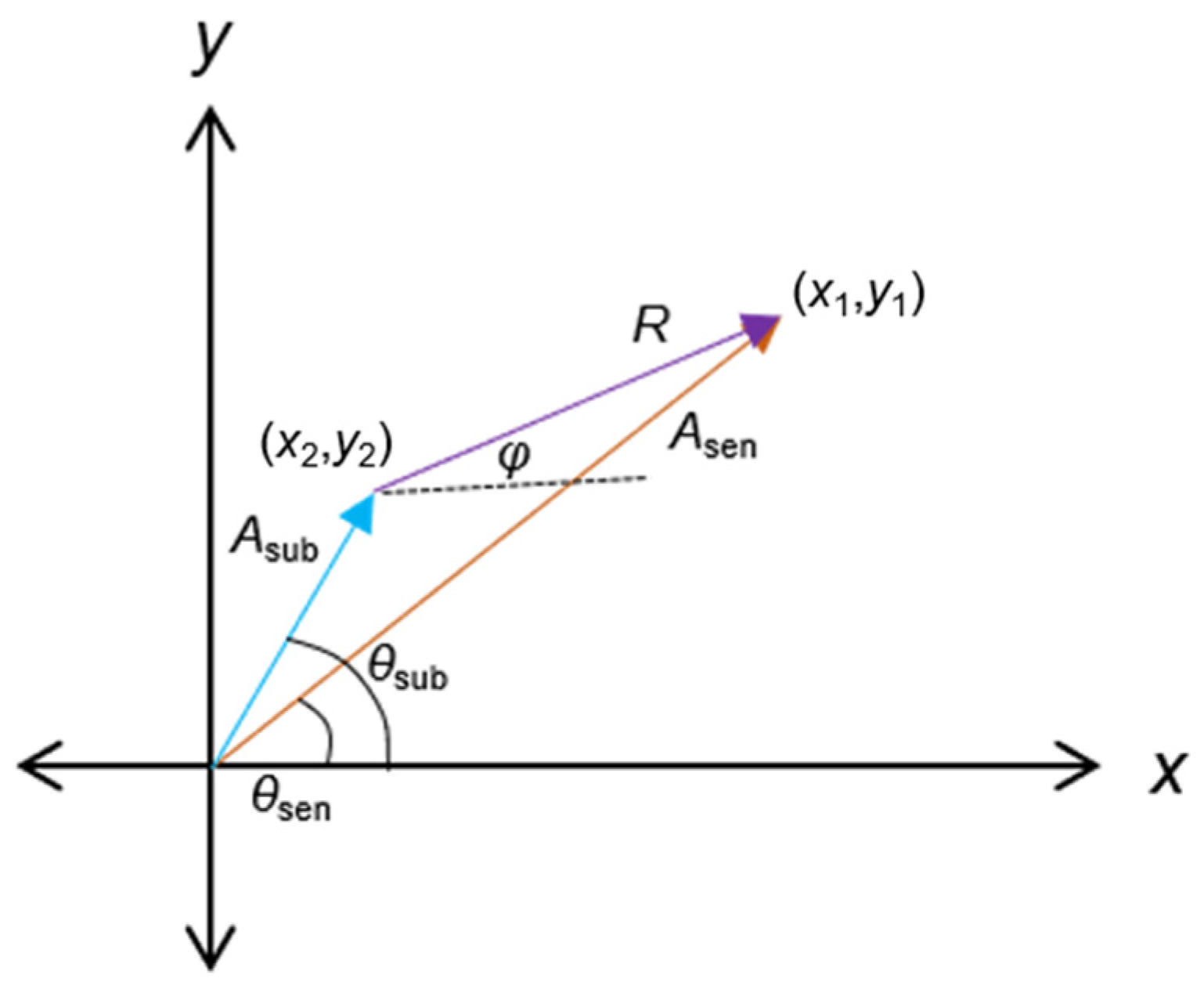
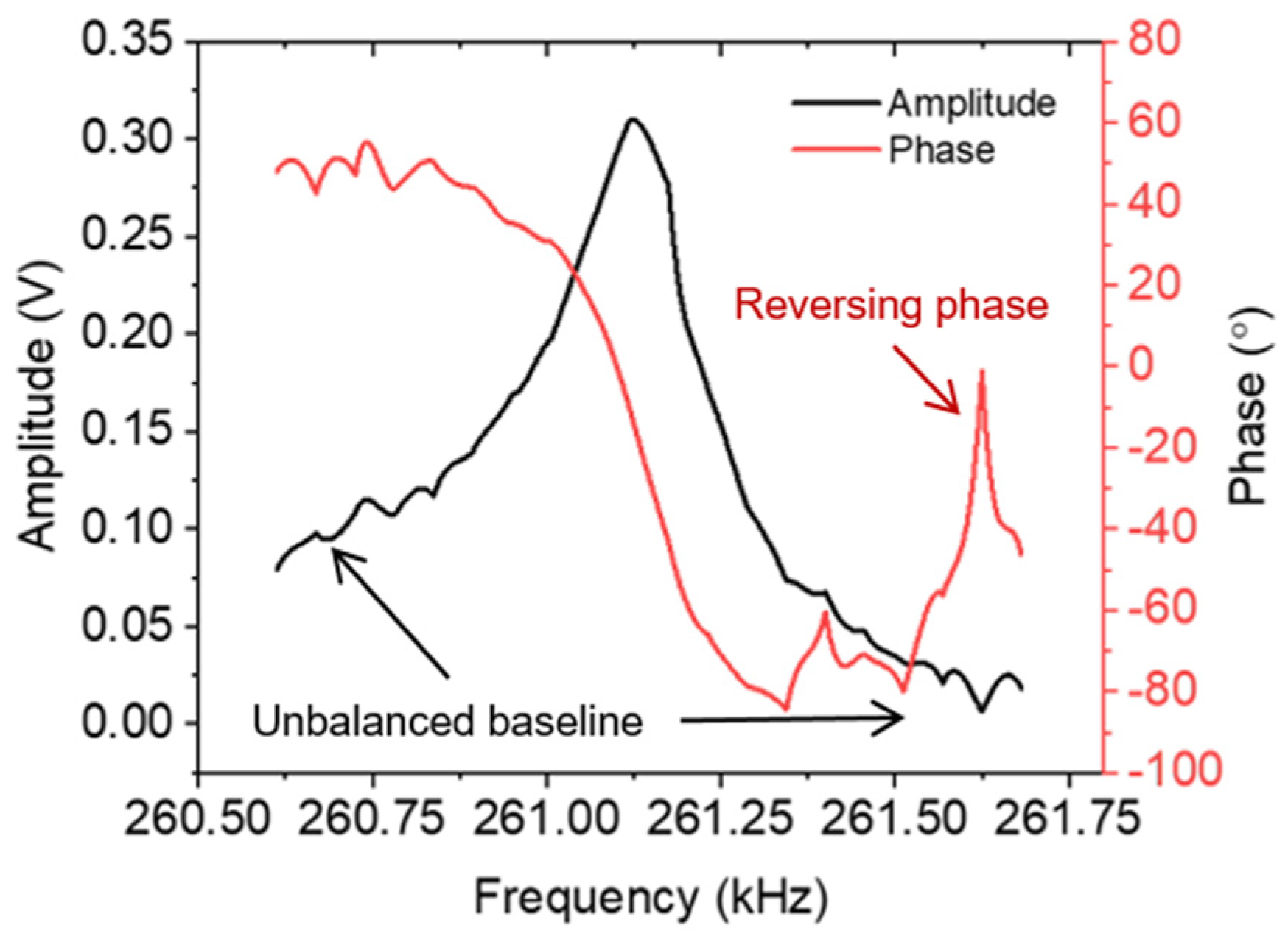
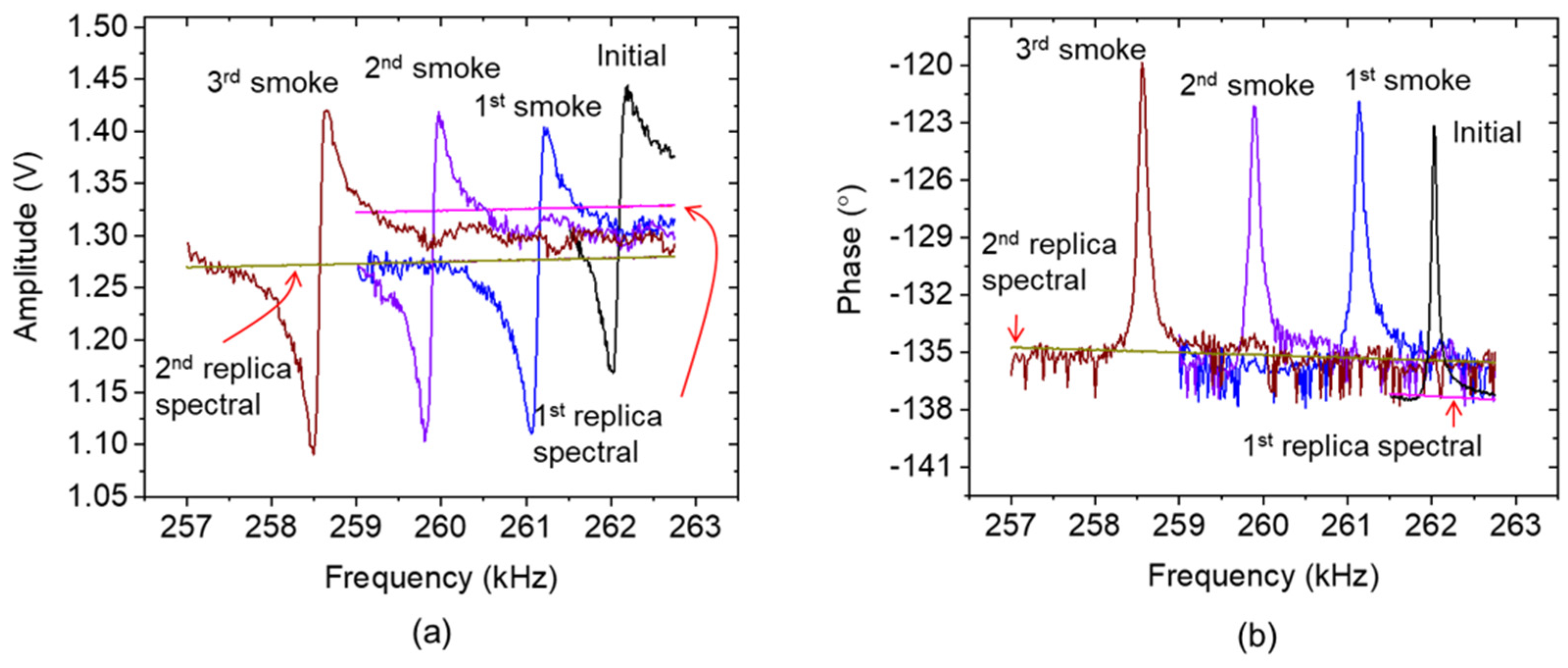
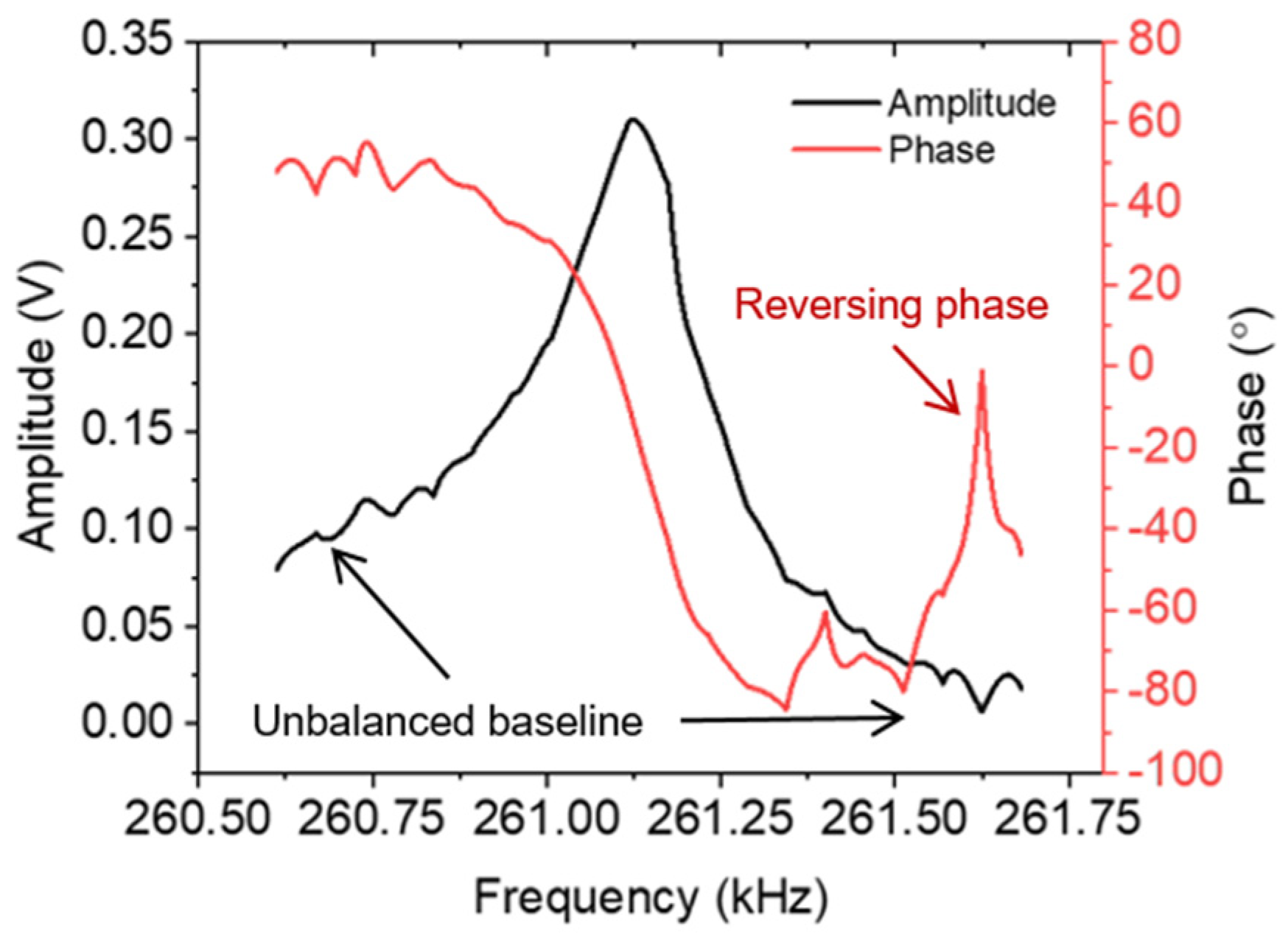
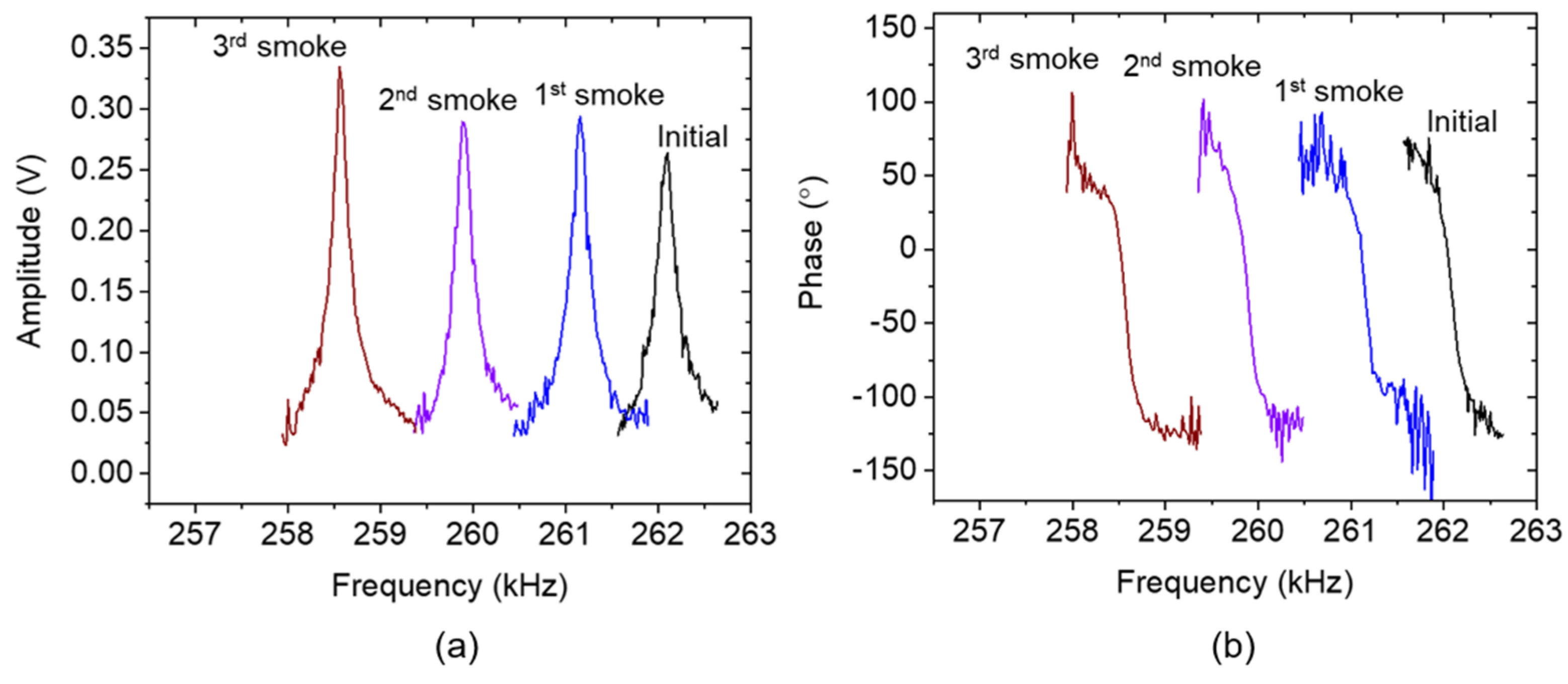
4.1. A Replica of the Baseline Spectral for Signal Optimization
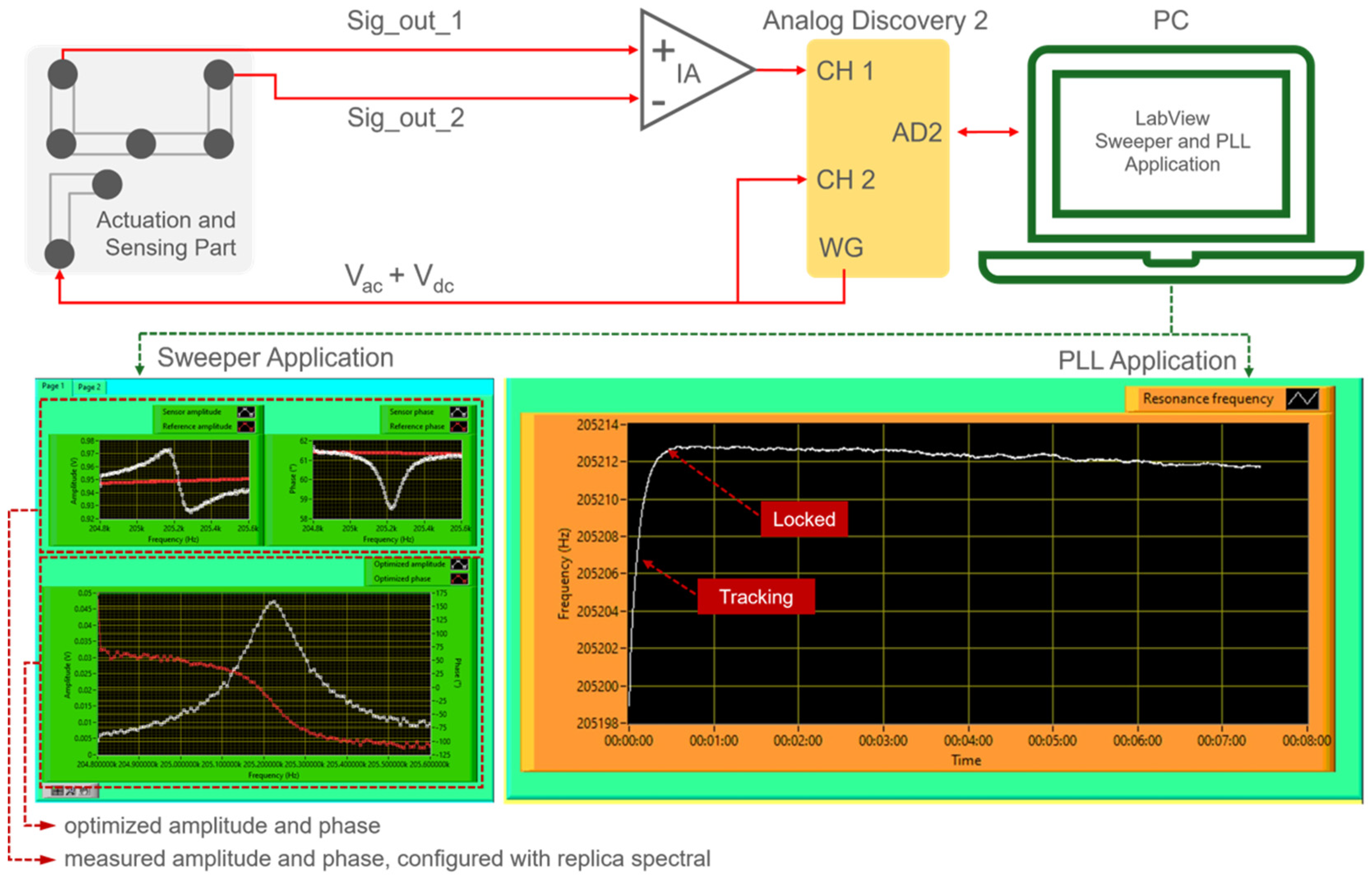
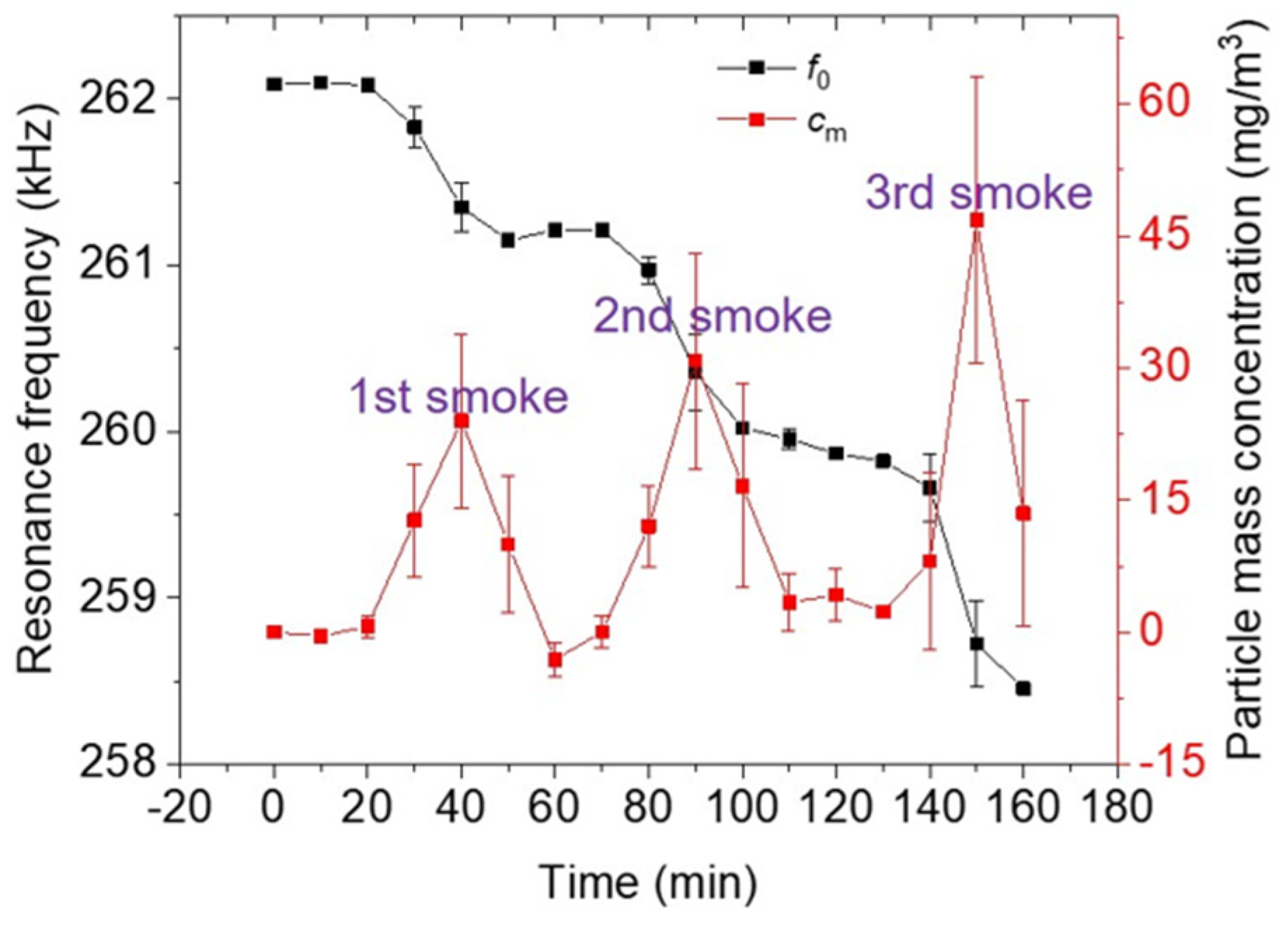
4.2. PLL-Based Cantilever-Resonance Tracking
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, C.; Jin, J.; Li, Y.; Ding, W.; Dai, M. Design and fabrication of a MEMS-based gas sensor containing WO3 sensitive layer for detection of NO2. J. Micro/Nanolith. MEMS MOEMS 2017, 16, 015002. [Google Scholar] [CrossRef]
- Qu, J.; Wu, H.; Cheng, P.; Wang, Q.; Sun, Q. Recent advances in MEMS-based micro heat pipes. Int. J. Heat Mass Transf. 2017, 110, 294–313. [Google Scholar] [CrossRef]
- Rezazadeh, G.; Tahmasebi, A.; Zubstov, M. Application of piezoelectric layers in electrostatic MEM actuators: Controlling of pull-in voltage. Microsyst. Technol. 2006, 12, 1163–1170. [Google Scholar] [CrossRef]
- Nikpourian, A.; Ghazavi, M.R.; Azizi, S. Size-dependent nonlinear behavior of a piezoelectrically actuated capacitive bistable microstructure. Int. J. Non. Linear. Mech. 2019, 114, 49–61. [Google Scholar] [CrossRef]
- Bogue, R. Recent developments in MEMS sensors: A review of applications, markets and technologies. Sens. Rev. 2013, 33, 300–304. [Google Scholar] [CrossRef]
- Vasiliev, A.A.; Pisliakov, A.V.; Sokolov, A.V.; Samotaev, N.N.; Soloviev, S.A.; Oblov, K.; Guarnieri, V.; Lorenzelli, L.; Brunelli, J.; Maglione, A.; et al. Non-silicon MEMS platforms for gas sensors. Sens. Actuators B Chem. 2016, 224, 700–713. [Google Scholar] [CrossRef]
- Rabih, A.A.; Dennis, J.O.; Ahmed, A.Y.; Khir, M.M.; Ahmed, M.G.; Idris, A.; Mian, M.U. MEMS-Based Acetone Vapor Sensor for Non-Invasive Screening of Diabetes. IEEE Sens. J. 2018, 18, 9486–9500. [Google Scholar] [CrossRef]
- Xu, J.; Bertke, M.; Gad, A.; Yu, F.; Hamdana, G.; Bakin, A.; Peiner, E. Fabrication of ZnO Nanorods on MEMS Piezoresistive Silicon Microcantilevers for Environmental Monitoring. Proc. Eurosens. 2017, 2017, 3–6. [Google Scholar]
- Nuryadi, R. Modeling of I-, T- and V-Shaped Microcantilevers for Environmental Monitoring. MSF 2013, 737, 119–125. [Google Scholar] [CrossRef]
- Algamili, A.S.; Khir, M.H.M.; Dennis, J.O.; Ahmed, A.Y.; Alabsi, S.S.; Ba Hashwan, S.S.; Junaid, M.M. A Review of Actuation and Sensing Mechanisms in MEMS-Based Sensor Devices. Nanoscale Res. Lett. 2021, 16, 16. [Google Scholar] [CrossRef]
- Sviličić, B.; Mastropaolo, E.; Zhang, R.; Cheung, R. Tunable MEMS cantilever resonators electrothermally actuated and piezoelectrically sensed. Microelectron. Eng. 2015, 145, 38–42. [Google Scholar] [CrossRef]
- Wei, L.; You, Z.; Kuai, X.; Zhang, M.; Yang, F.; Wang, X. MEMS thermal-piezoresistive resonators, thermal-piezoresistive oscillators, and sensors. Microsyst. Technol. 2023, 29, 1–17. [Google Scholar] [CrossRef]
- Moore, S.; Moheimani, S.O.R. MEMS Resonator with Displacement Sensor Based on Electro-Thermal Principles. In Proceedings of the 6th IFAC Symposium on Mechatronic Systems, Hangzhou, China, 10–12 April 2013; ISBN 9783902823311. [Google Scholar]
- Shi, H.; Fan, S.; Xing, W.; Sun, J. The design and simulation study of the electrothermal excitation resonant beam based on slit-structure stress concentration effect. In Proceedings of the 2012 8th IEEE International Symposium on Instrumentation and Control Technology (ISICT) Proceedings, London, UK, 11–13 July 2012; pp. 205–209. [Google Scholar]
- Chen, D.; Zhang, H.; Sun, J.; Pandit, M.; Sobreviela, G.; Wang, Y.; Zhang, Q.; Seshia, A.; Xie, J. Phase-Controlled Oscillation in a Capacitive Nonlinear Ring Resonator with On-Chip Feedthrough De-Embedding. In Proceedings of the 2020 IEEE 33rd International Conference on Micro Electro Mechanical Systems (MEMS), Vancouver, BC, Canada, 18–22 January 2020; pp. 773–776. [Google Scholar] [CrossRef]
- Zhang, Y.; Bao, J.F.; Li, X.Y.; Zhou, X.; Wu, Z.H.; Zhang, X.S. Fully-differential TPoS resonators based on dual interdigital electrodes for feedthrough suppression. Micromachines 2020, 11, 119. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Liu, Y.; Xu, H.; Li, Z.; Li, Z. A Wideband and Low Reference Spur PLL with Clock Feedthrough Suppressed and Low Current Mismatch Charge Pump and Symmetrical CML Divider. Electronics 2023, 12, 4164. [Google Scholar] [CrossRef]
- Kwoka, K.; Orłowska, K.; Majstrzyk, W.; Sierakowski, A.; Janus, P.; Tomaszewski, D.; Grabiec, P.; Piasecki, T.; Gotszalk, T. Soft piezoresistive cantilevers for adhesion force measurements. Sens. Actuators A Phys. 2020, 301, 111747. [Google Scholar] [CrossRef]
- Niedermayer, A.O.; Voglhuber-Brunnmaier, T.; Sell, J.; Jakoby, B. Methods for the robust measurement of the resonant frequency and quality factor of significantly damped resonating devices. Meas. Sci. Technol. 2012, 23, 085107. [Google Scholar] [CrossRef]
- Brand, O.; Dufour, I.; Heinrich, S.M.; Josse, F. Resonant MEMS: Fundamentals, Implementation and Application; Brand, O., Dufour, I., Heinrich, S.M., Josse, F., Eds.; Wiley-VCH: Weinheim, Germany, 2015. [Google Scholar]
- Chu, C.-C.; Dey, S.; Liu, T.-Y.; Chen, C.-C.; Li, S.-S. Thermal-Piezoresistive SOI-MEMS Oscillators Based on a Fully Differential Mechanically Coupled Resonator Array for Mass Sensing Applications. J. Microelectromech. Syst. 2018, 27, 59–72. [Google Scholar] [CrossRef]
- Iqbal, F.; Lee, B. A Study on Measurement Variations in Resonant Characteristics of Electrostatically Actuated MEMS Resonators. Micromachines 2018, 9, 173. [Google Scholar] [CrossRef]
- Setiono, A.; Fahrbach, M.; Xu, J.; Nyang’au, W.; Bertke, M.; Wasisto, H.; Peiner, E. Programmable reference parameters for resonance locking in electro-thermal piezoresistive cantilever sensor. In Proceedings of the 20th GMA/ITG-Fachtagung Sensoren und Messsysteme 2019, Nürnberg, Germany, 25–26 June 2019; Tagungsband. pp. 243–249. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J. An improved Q-PLL to overcome the speed reversal problems in sensorless PMSM drive. In Proceedings of the 2016 IEEE 8th International Power Electronics and Motion Control Conference (IPEMC-ECCE Asia), Hefei, China, 22–26 May 2016. [Google Scholar]
- Bertke, M.; Hamdana, G.; Wu, W.; Wasisto, H.S.; Uhde, E.; Peiner, E. Analysis of asymmetric resonance response of thermally excited silicon micro-cantilevers for mass-sensitive nanoparticle detection. J. Micromech. Microeng. 2017, 27, 064001. [Google Scholar] [CrossRef]
- Stassi, S.; Chiadò, A.; Calafiore, G.; Palmara, G.; Cabrini, S.; Ricciardi, C. Experimental evidence of Fano resonances in nanomechanical resonators. Sci. Rep. 2017, 7, 1065. [Google Scholar] [CrossRef]
- Setiono, A.; Nyang’au, W.O.; Fahrbach, M.; Xu, J.; Bertke, M.; Wasisto, H.S.; Peiner, E. Improvement of frequency responses of an in-plane electro-thermal cantilever sensor for real-time measurement. J. Micromech. Microeng. 2019, 29, 124006. [Google Scholar] [CrossRef]
- Yang, Y. Temporal Data Mining via Unsupervised Ensemble Learning; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Waidyasooriya, H.M.; Hariyama, M.; Uchiyama, K. Design of FPGA-Based Computing Systems with OpenCL [Electronic Resource]; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Lee, E. Theory of Electrophoresis and Diffusiophoresis of Highly Charged Colloidal Particles; Academic Press: London, UK, 2019. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
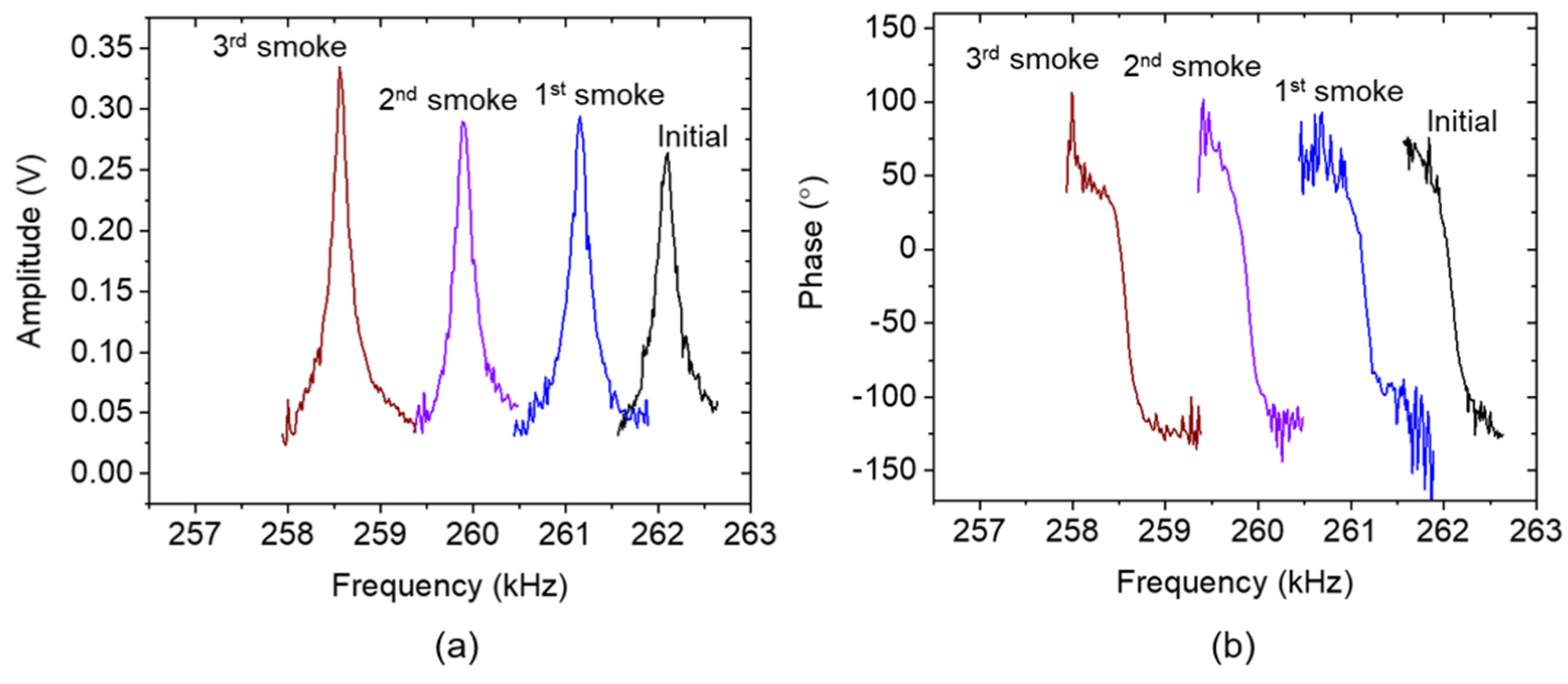
| Smoke Exposure Condition | Sweeper (kHz) | PLL Tracking (kHz) | Deviation (Hz) |
|---|---|---|---|
| Initial | 262.10 | 262.09 | 10 |
| 1st smoke | 261.16 | 261.19 | 30 |
| 2nd smoke | 259.90 | 259.88 | 20 |
| 3rd smoke | 258.55 | 258.46 | 90 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Setiono, A.; Nelfyenny; Nyang’au, W.O.; Peiner, E. Replicating Spectral Baseline for Unambiguous Frequency Locking in Resonant Sensors. Sensors 2024, 24, 2318. https://doi.org/10.3390/s24072318
Setiono A, Nelfyenny, Nyang’au WO, Peiner E. Replicating Spectral Baseline for Unambiguous Frequency Locking in Resonant Sensors. Sensors. 2024; 24(7):2318. https://doi.org/10.3390/s24072318
Chicago/Turabian StyleSetiono, Andi, Nelfyenny, Wilson Ombati Nyang’au, and Erwin Peiner. 2024. "Replicating Spectral Baseline for Unambiguous Frequency Locking in Resonant Sensors" Sensors 24, no. 7: 2318. https://doi.org/10.3390/s24072318
APA StyleSetiono, A., Nelfyenny, Nyang’au, W. O., & Peiner, E. (2024). Replicating Spectral Baseline for Unambiguous Frequency Locking in Resonant Sensors. Sensors, 24(7), 2318. https://doi.org/10.3390/s24072318