
Coupling Different Road Traffic Noise Models with a Multilinear Regressive Model: A Measurements-Independent Technique for Urban Road Traffic Noise Prediction





Abstract
1. Introduction
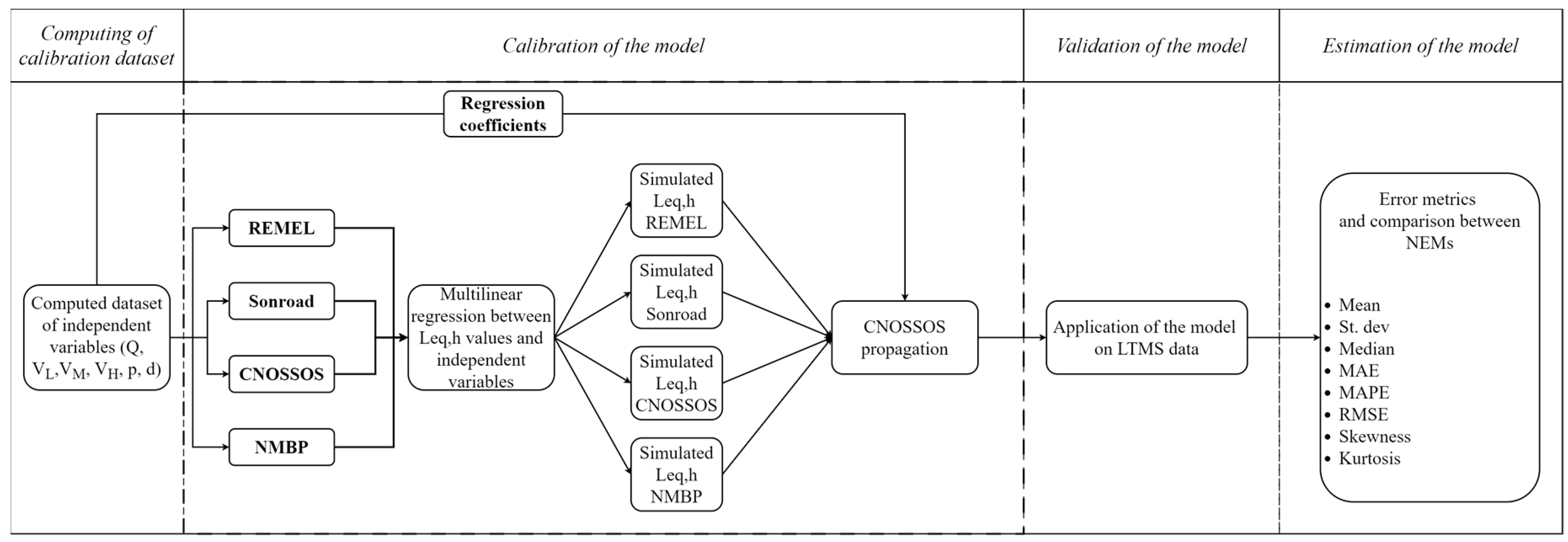
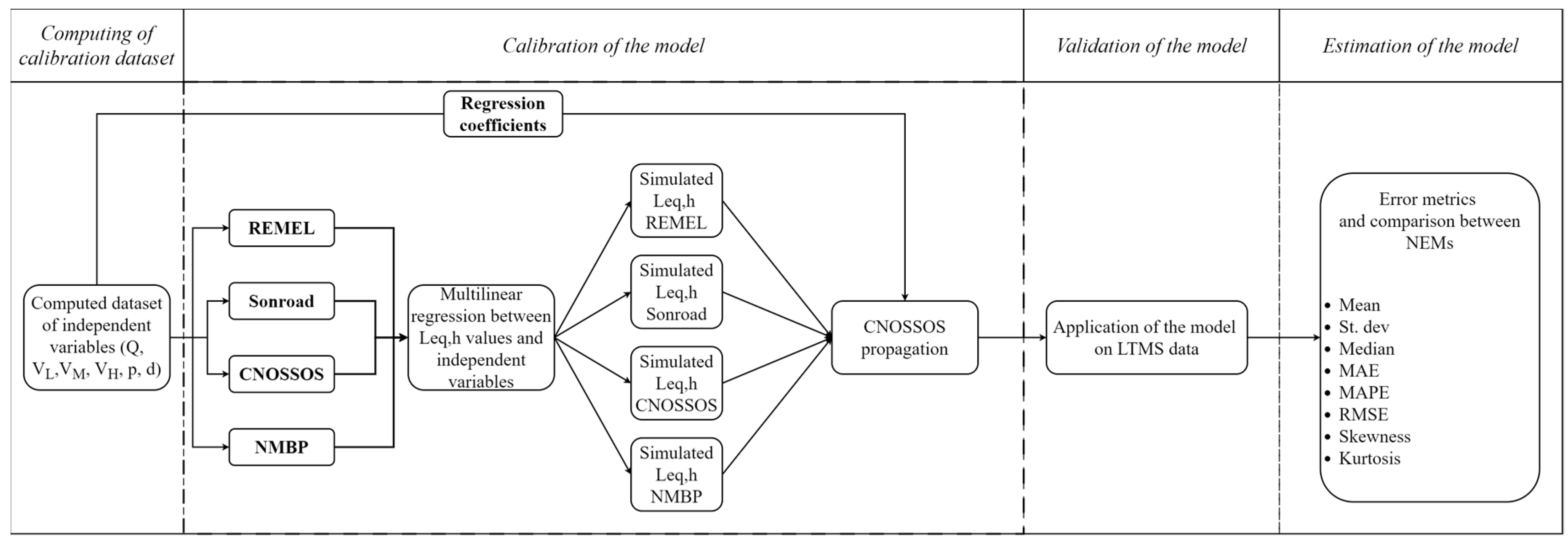
2. Materials and Methods
2.1. Computing of the Dataset for the Calibration
2.2. Calibration and Validation of the Multilinear Regression Model According to the Four Considered NEMs
2.3. Estimation of the Performances of the Model
3. Results
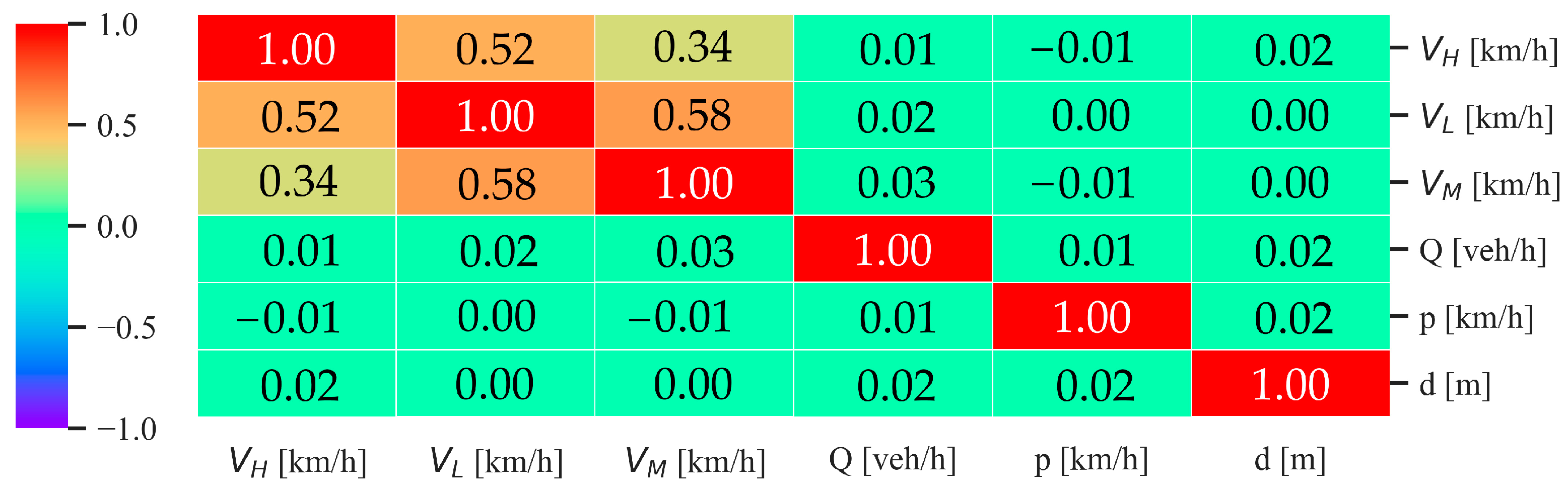
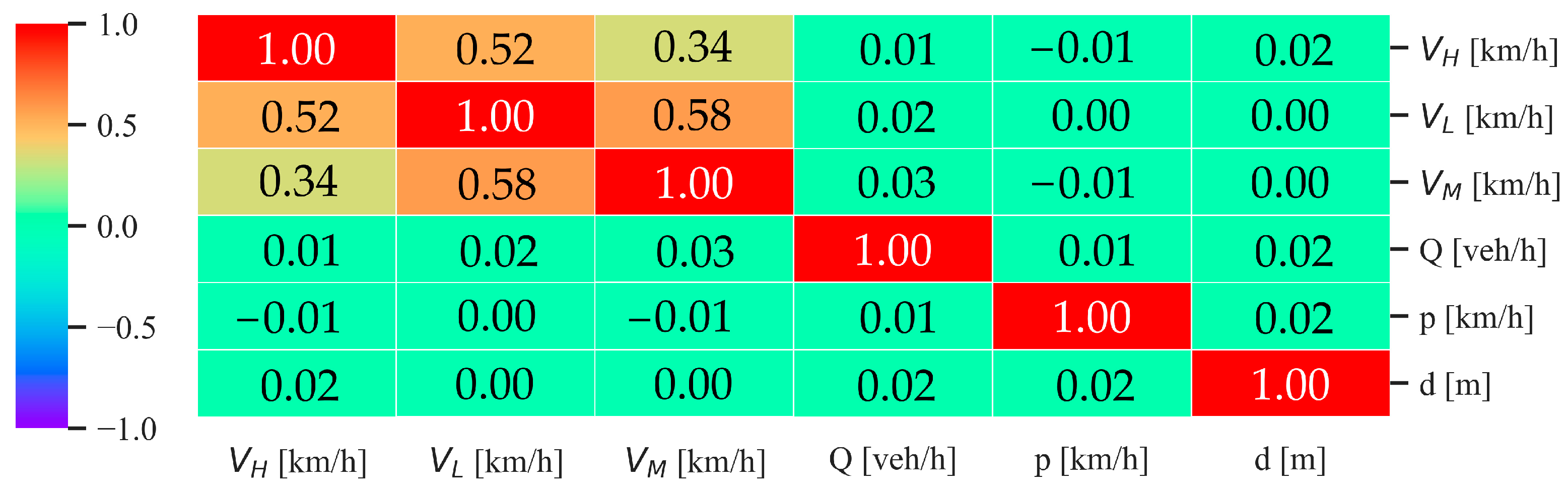
3.1. Computation and Analysis of the Dataset for the Model Calibration
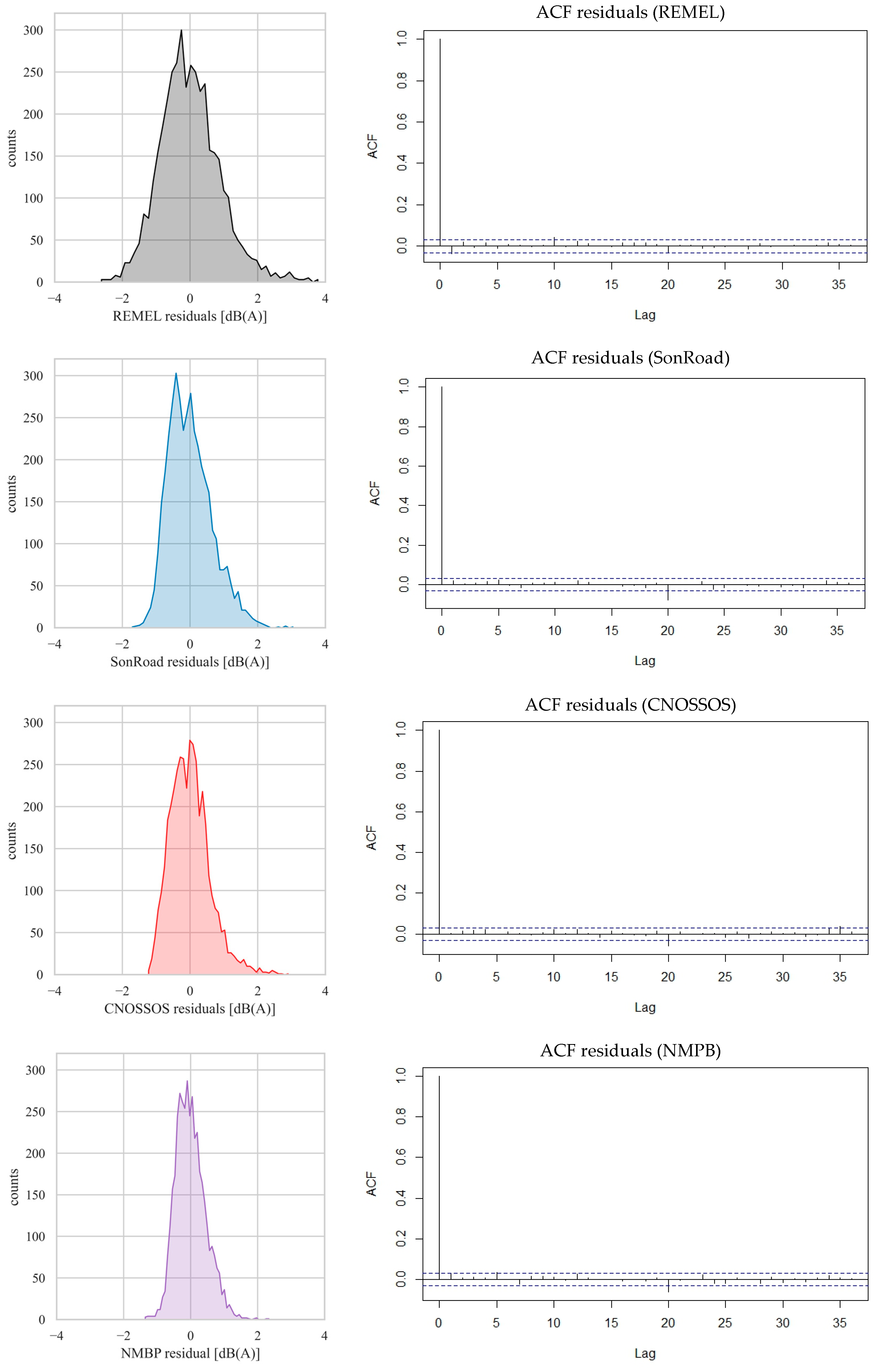
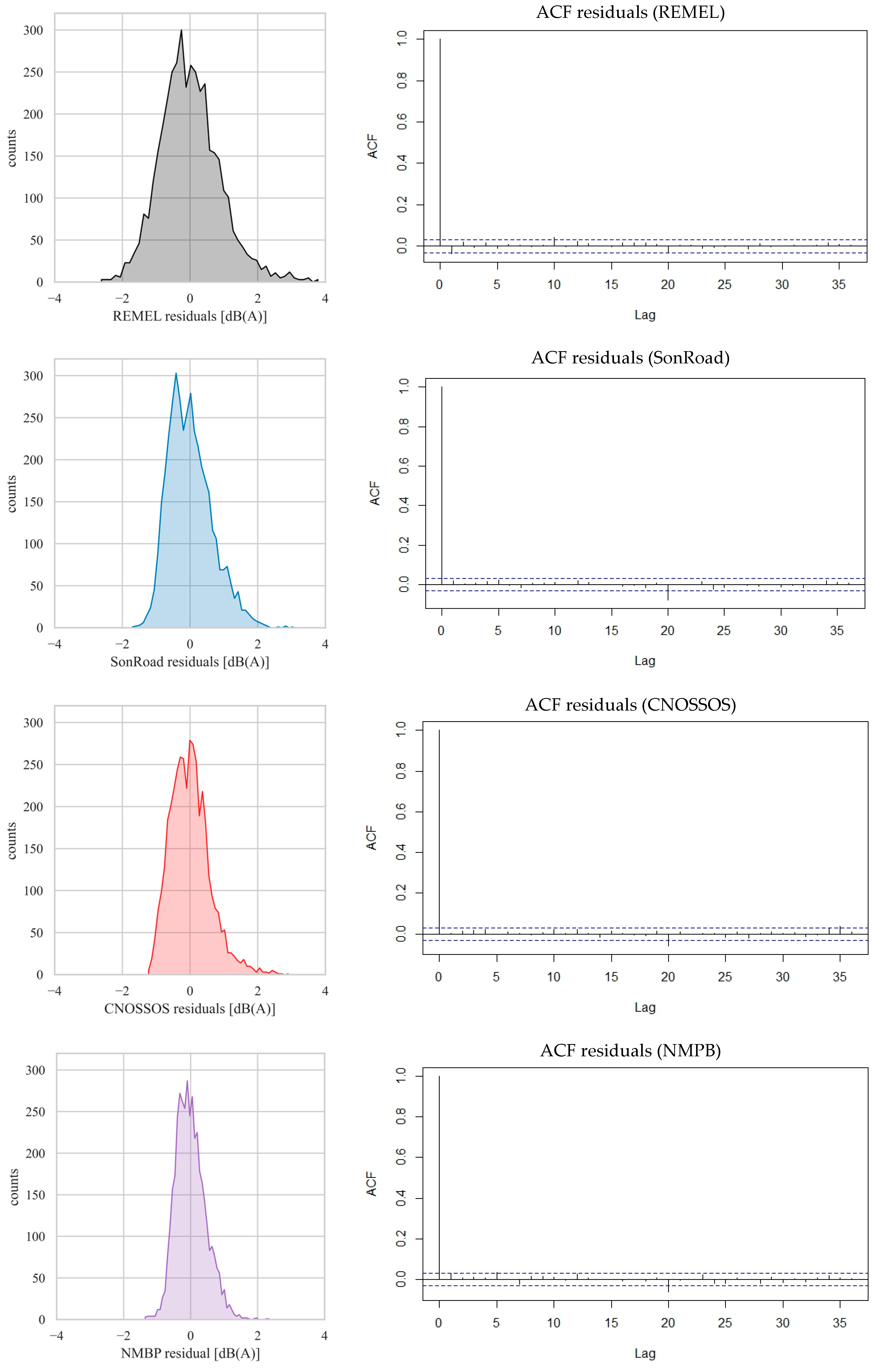
3.2. Calibration of the Model and Residuals
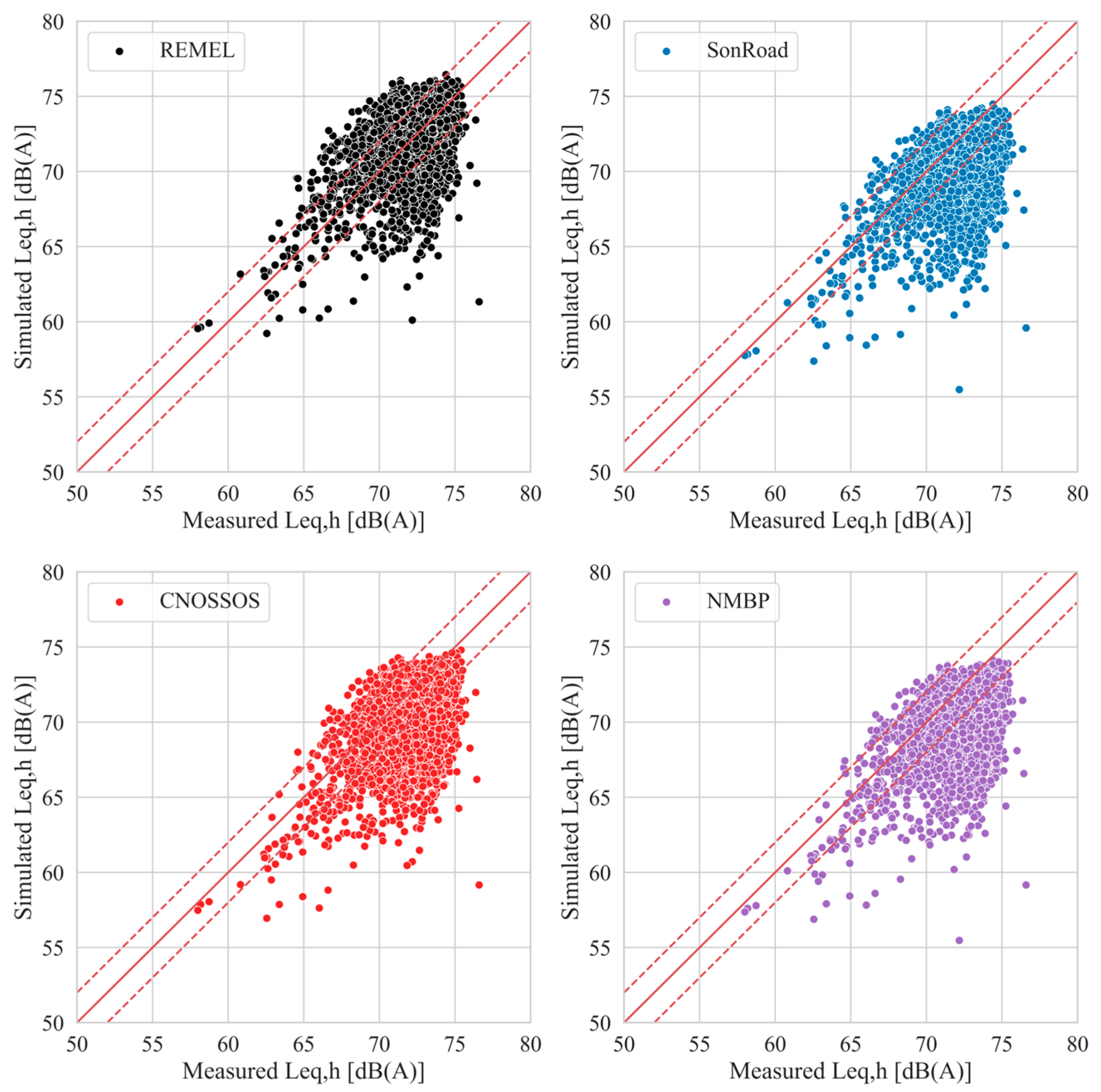
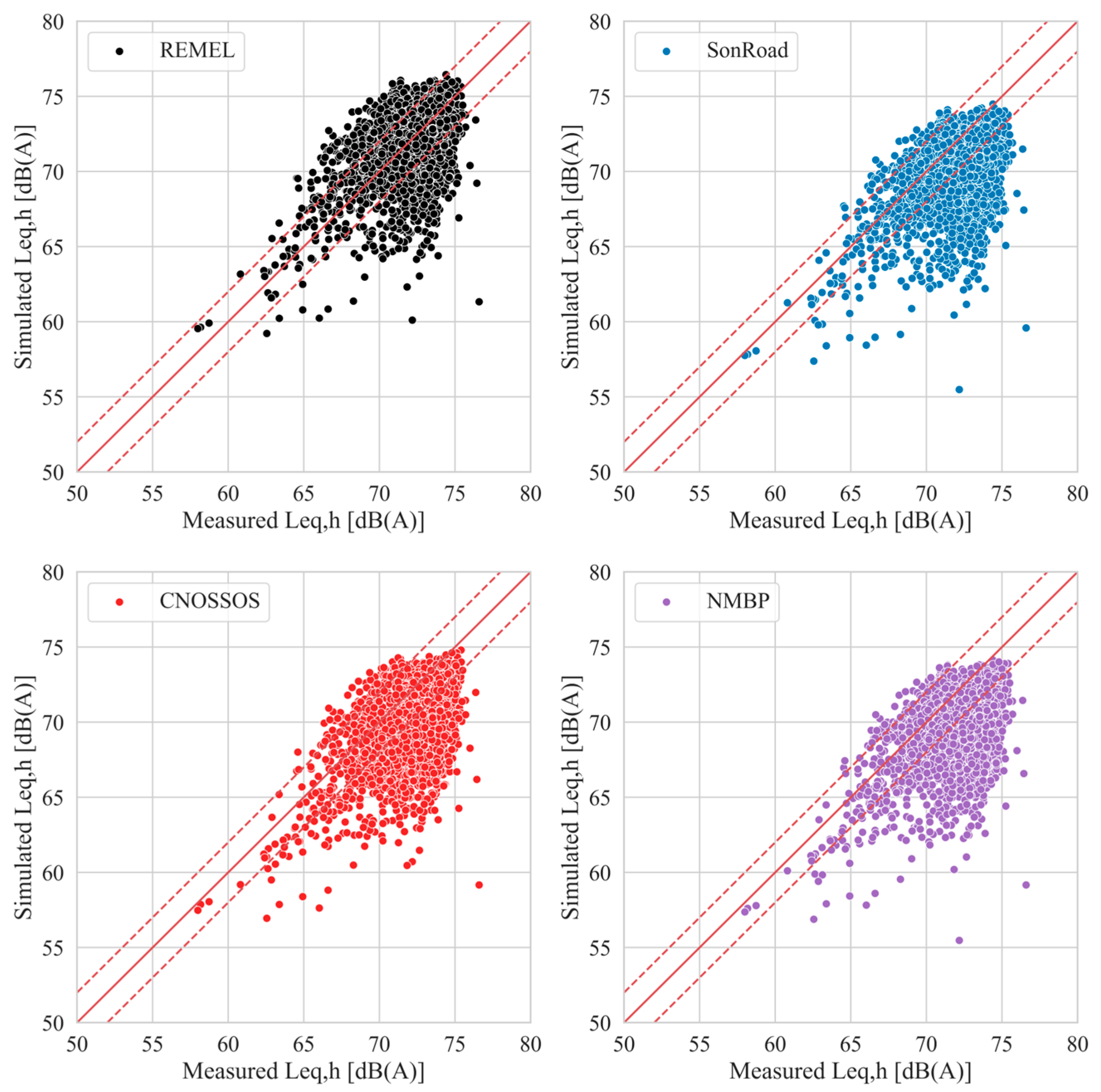
3.3. Validation of the Model
3.4. Comparison with RTNMs Application without Regression
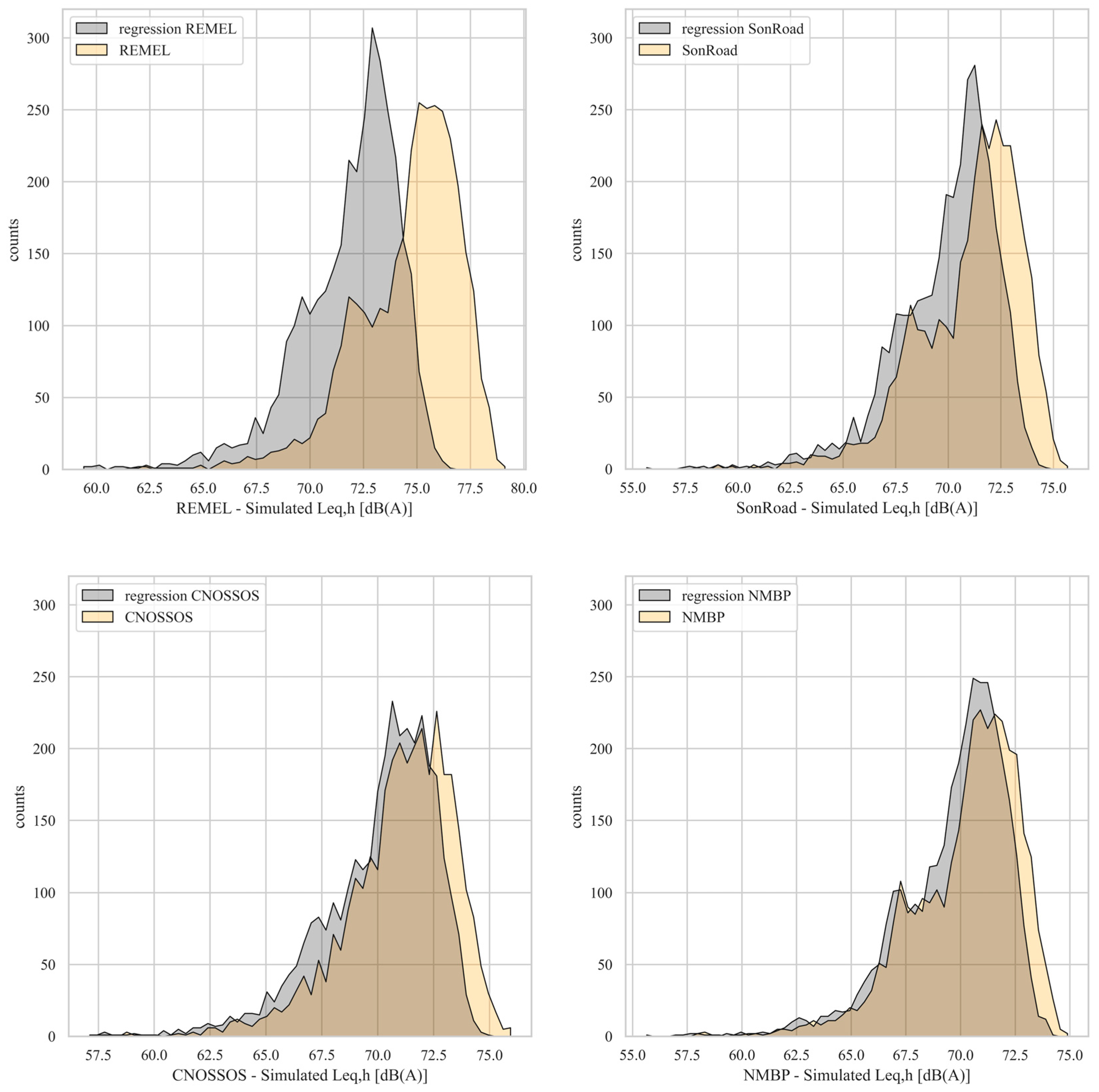
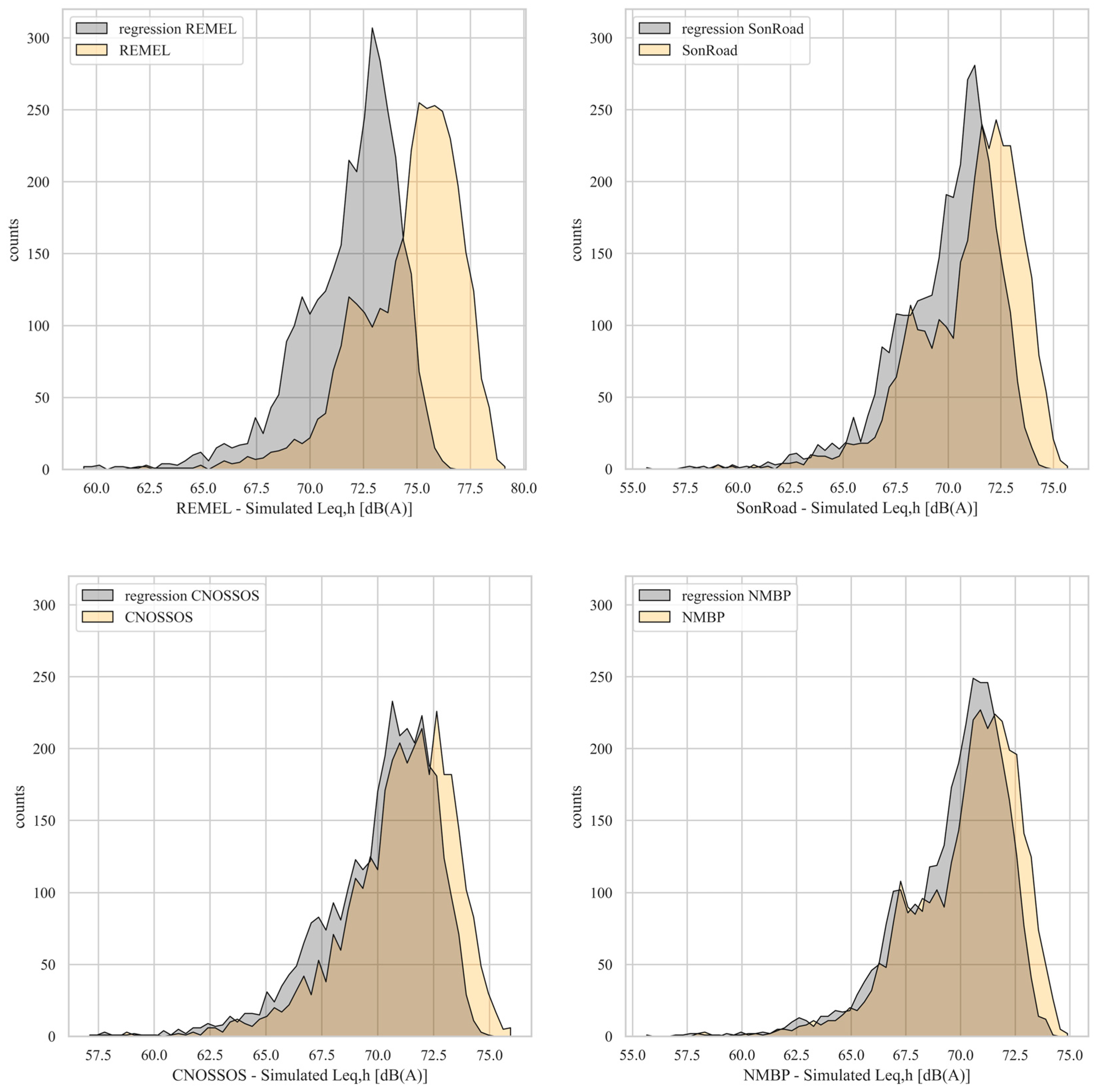
3.4.1. Statistical Distributions of RTNMs Results
3.4.2. Error Metrics
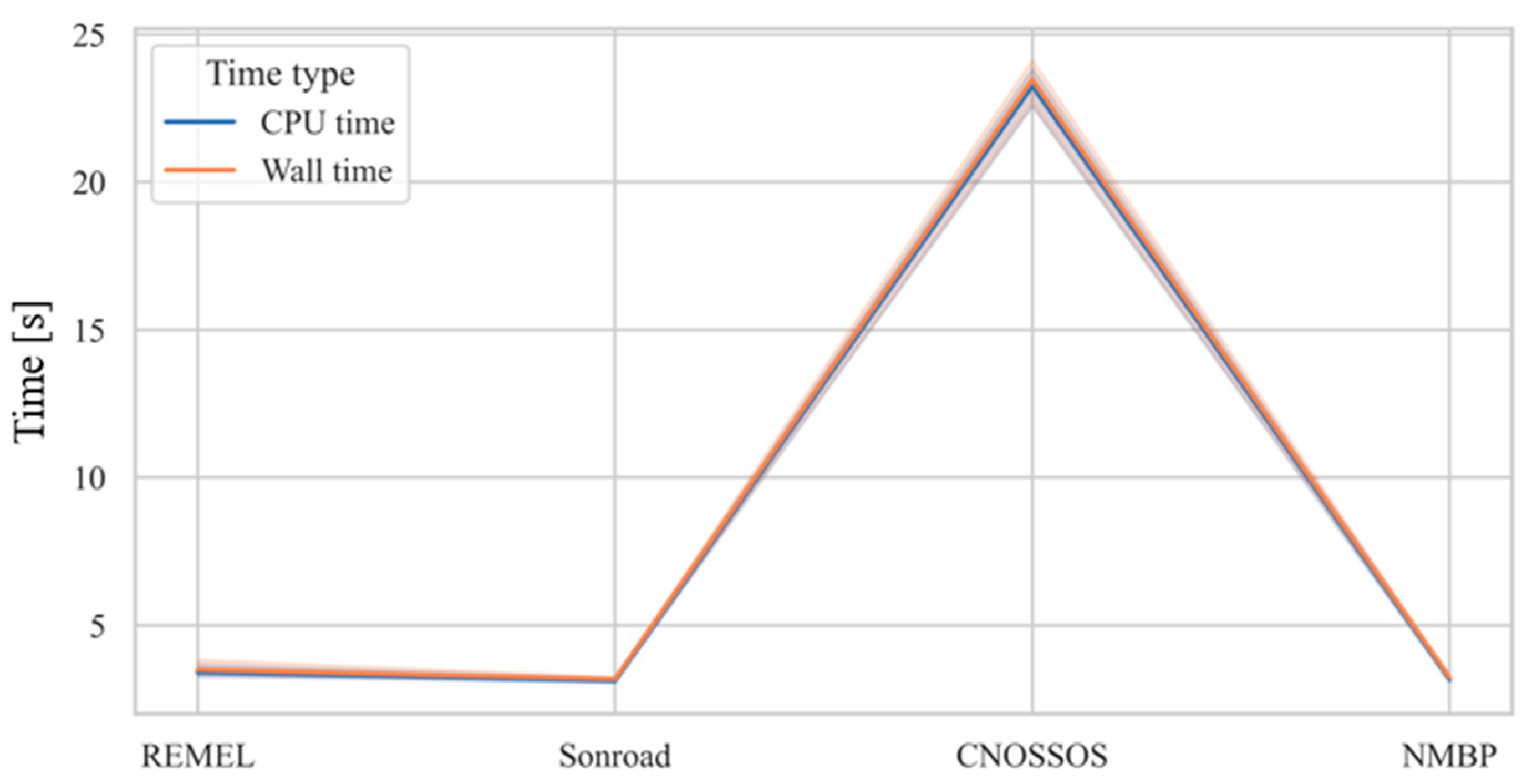
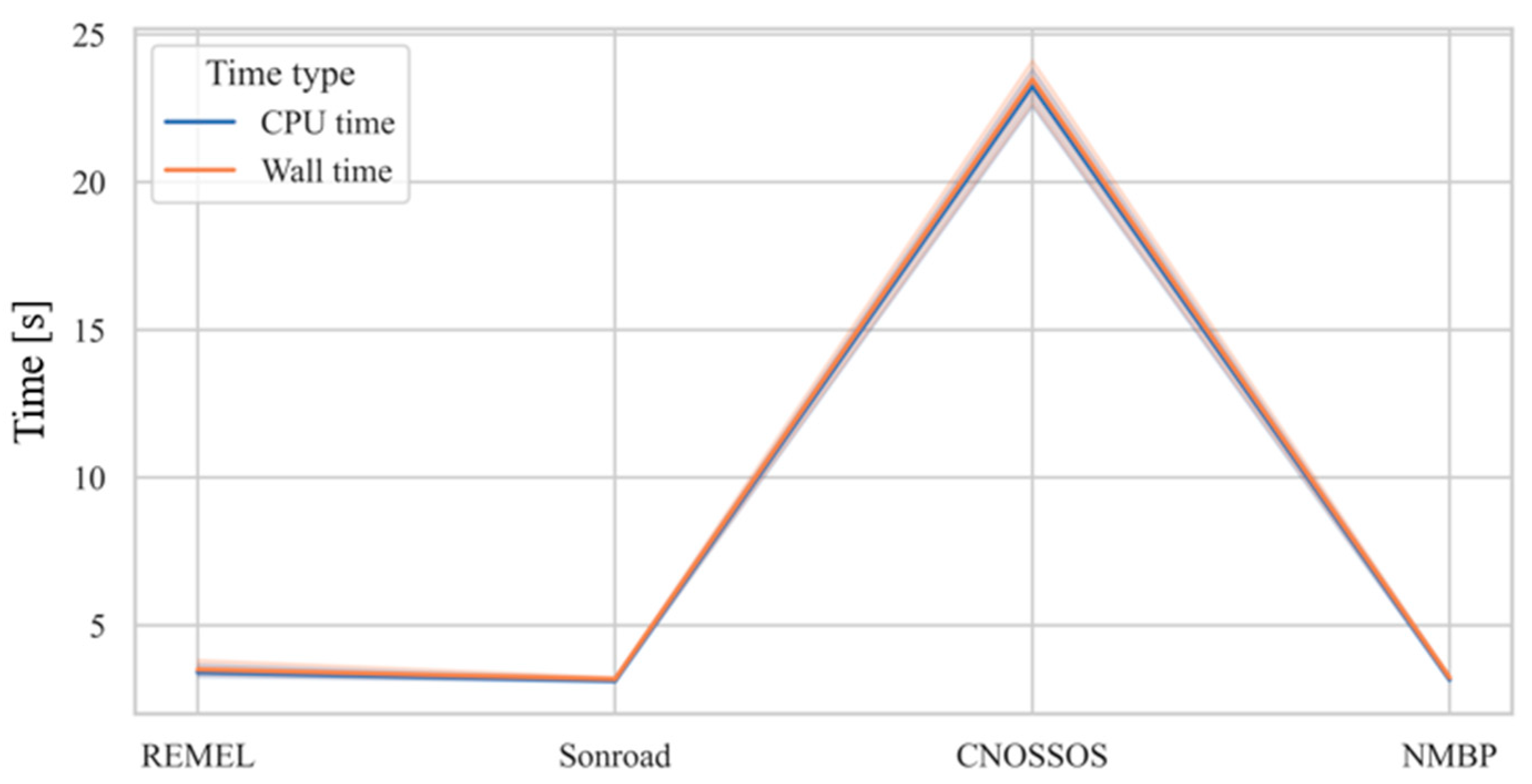
3.4.3. Computational Efforts Required–CPU Time and Wall Time
4. Discussion
4.1. Dataset for Calibration
4.2. Model Performances
4.3. Connections with Sensors Networks
4.4. Final Evaluation of the Model and Its Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- European Environment Agency. The European Environment—State and Outlook 2020; European Environment Agency: Copenhagen, Denmark, 2019; ISBN 9789292131142.
- European Commission. Statistical Pocketbook 2023—EU Transport in Figures; European Commission: Brussels, Belgium, 2023. [CrossRef]
- European Environmental Bureau. Noise Pollution. Available online: https://eeb.org/work-areas/air-and-noise-pollution/noise-pollution/ (accessed on 20 October 2023).
- Muzet, A. Environmental Noise, Sleep and Health. Sleep Med. Rev. 2007, 11, 135–142. [Google Scholar] [CrossRef]
- Singh, D.; Kumari, N.; Sharma, P. A Review of Adverse Effects of Road Traffic Noise on Human Health. Fluct. Noise Lett. 2018, 17, 1830001. [Google Scholar] [CrossRef]
- Erickson, L.C.; Newman, R.S. Influences of Background Noise on Infants and Children. Curr. Dir. Psychol. Sci. 2017, 26, 451–457. [Google Scholar] [CrossRef]
- Minichilli, F.; Gorini, F.; Ascari, E.; Bianchi, F.; Coi, A.; Fredianelli, L.; Licitra, G.; Manzoli, F.; Mezzasalma, L.; Cori, L. Annoyance Judgment and Measurements of Environmental Noise: A Focus on Italian Secondary Schools. Int. J. Environ. Res. Public Health 2018, 15, 208. [Google Scholar] [CrossRef]
- Petri, D.; Licitra, G.; Vigotti, M.A.; Fredianelli, L. Effects of Exposure to Road, Railway, Airport and Recreational Noise on Blood Pressure and Hypertension. Int. J. Environ. Res. Public Health 2021, 18, 9145. [Google Scholar] [CrossRef]
- Banerjee, D. Road Traffic Noise Exposure and Annoyance: A Cross-Sectional Study among Adult Indian Population. Noise Health 2013, 15, 342–346. [Google Scholar] [CrossRef] [PubMed]
- Halonen, J.I.; Dehbi, H.M.; Hansell, A.L.; Gulliver, J.; Fecht, D.; Blangiardo, M.; Kelly, F.J.; Chaturvedi, N.; Kivimäki, M.; Tonne, C. Associations of Night-Time Road Traffic Noise with Carotid Intima-Media Thickness and Blood Pressure: The Whitehall II and SABRE Study Cohorts. Environ. Int. 2017, 98, 54–61. [Google Scholar] [CrossRef] [PubMed]
- Sørensen, M.; Hvidtfeldt, U.A.; Poulsen, A.H.; Thygesen, L.C.; Frohn, L.M.; Khan, J.; Raaschou-Nielsen, O. Long-Term Exposure to Transportation Noise and Risk of Type 2 Diabetes: A Cohort Study. Environ. Res. 2023, 217, 114795. [Google Scholar] [CrossRef] [PubMed]
- European Commission. Directive 2002/49/EC Relating to the Assessment and Management of Environmental Noise; European Commission: Brussels, Belgium, 2002.
- Socoró, J.C.; Alías, F.; Alsina-Pagès, R.M. An Anomalous Noise Events Detector for Dynamic Road Traffic Noise Mapping in Real-Life Urban and Suburban Environments. Sensors 2017, 17, 2323. [Google Scholar] [CrossRef]
- Sevillano, X.; Socoró, J.C.; Alías, F.; Bellucci, P.; Peruzzi, L.; Radaelli, S.; Coppi, P.; Nencini, L.; Cerniglia, A.; Bisceglie, A.; et al. DYNAMAP—Development of Low Cost Sensors Networks for Real Time Noise Mapping. Noise Mapp. 2016, 3, 172–189. [Google Scholar] [CrossRef]
- Picaut, J.; Can, A.; Fortin, N.; Ardouin, J.; Lagrange, M. Low-Cost Sensors for Urban Noise Monitoring Networks—A Literature Review. Sensors 2020, 20, 2256. [Google Scholar] [CrossRef]
- Navarro, J.; Vidaña-Vila, E.; Alsina-Pagès, R.M.; Hervás, M. Real-Time Distributed Architecture for Remote Acoustic Elderly Monitoring in Residential-Scale Ambient Assisted Living Scenarios. Sensors 2018, 18, 2492. [Google Scholar] [CrossRef]
- Alías, F.; Alsina-Pagès, R.M. Review of Wireless Acoustic Sensor Networks for Environmental Noise Monitoring in Smart Cities. J. Sens. 2019, 2019, 7634860. [Google Scholar] [CrossRef]
- Pascale, A.; Fernandes, P.; Guarnaccia, C.; Coelho, M.C. A Study on Vehicle Noise Emission Modelling: Correlation with Air Pollutant Emissions, Impact of Kinematic Variables and Critical Hotspots. Sci. Total Environ. 2021, 787, 147647. [Google Scholar] [CrossRef]
- Pascale, A.; Macedo, E.; Guarnaccia, C.; Coelho, M.C. Smart Mobility Procedure for Road Traffic Noise Dynamic Estimation by Video Analysis. Appl. Acoust. 2023, 208, 109381. [Google Scholar] [CrossRef]
- Pascale, A.; Guarnaccia, C.; Macedo, E.; Fernandes, P.; Miranda, A.I.; Sargento, S.; Coelho, M.C. Road Traffic Noise Monitoring in a Smart City: Sensor and Model-Based Approach. Transp. Res. Part D Transp. Environ. 2023, 125, 103979. [Google Scholar] [CrossRef]
- Baclet, S.; Khoshkhah, K.; Pourmoradnasseri, M.; Rumpler, R.; Hadachi, A. Near-Real-Time Dynamic Noise Mapping and Exposure Assessment Using Calibrated Microscopic Traffic Simulations. Transp. Res. Part D Transp. Environ. 2023, 124, 103922. [Google Scholar] [CrossRef]
- Benocci, R.; Molteni, A.; Cambiaghi, M.; Angelini, F.; Roman, H.E.; Zambon, G. Reliability of Dynamap Traffic Noise Prediction. Appl. Acoust. 2019, 156, 142–150. [Google Scholar] [CrossRef]
- Smiraglia, M.; Benocci, R.; Zambon, G.; Roman, H.E. Predicting Hourly Trafic Noise from Trafic Flow Rate Model: Underlying Concepts for the DYNAMAP Project. Noise Mapp. 2016, 3, 130–139. [Google Scholar] [CrossRef]
- Zambon, G.; Roman, H.E.; Smiraglia, M.; Benocci, R. Monitoring and Prediction of Traffic Noise in Large Urban Areas. Appl. Sci. 2018, 8, 251. [Google Scholar] [CrossRef]
- Benocci, R.; Confalonieri, C.; Roman, H.E.; Angelini, F.; Zambon, G. Accuracy of the Dynamic Acoustic Map in a Large City Generated by Fixed Monitoring Units. Sensors 2020, 20, 412. [Google Scholar] [CrossRef]
- Hood, R.A. Accuracy of Calculation of Road Traffic Noise. Appl. Acoust. 1987, 21, 139–146. [Google Scholar] [CrossRef]
- Heutschi, K. SonRoad: New Swiss Road Traffic Model. Acta Acust. United Acust. 2004, 90, 548–554. [Google Scholar]
- Dutilleux, G.; Defrance, J.; Ecotière, D.; Gauvreau, B.; Bérengier, M.; Besnard, F.; Le Duc, E. NMPB-Routes-2008: The Revision of the French Method for Road Traffic Noise Prediction. Acta Acust. United Acust. 2010, 96, 452–462. [Google Scholar] [CrossRef]
- Sakamoto, S. Road Traffic Noise Prediction Model “ASJ RTN-Model 2018”: Report of the Research Committee on Road Traffic Noise. Acoust. Sci. Technol. 2020, 41, 529–589. [Google Scholar] [CrossRef]
- RLS Richtlinien für den Lärmschutzan Strassen; BM für Verkehr: Bonn, Germany, 1990.
- Watts, G. Harmonoise Prediction Model for Road Traffic Noise; Published Project Report PPR034; TRL: Wokingham, UK, 2005. [Google Scholar]
- Quartieri, J.; Iannone, G.; Guarnaccia, C. On the Improvement of Statistical Traffic Noise Prediction Tools. In Proceedings of the 11th WSEAS International Conference on “Acoustics & Music: Theory & Applications” (AMTA’10), Iasi, Romania, 13–15 June 2010; pp. 201–207. [Google Scholar]
- Kephalopoulos, S.; Paviotti, M.; Anfosso-Lédée, F. Common Noise Assessment Methods in Europe (CNOSSOS-EU); Publications Office of the European Union: Luxembourg, 2012; ISBN 9789279252815. [Google Scholar]
- Kok, A.; van Beek, A. Amendments for CNOSSOS-EU; RIVM: Bilthoven, The Netherlands, 2019. [CrossRef]
- Guarnaccia, C.; Bandeira, J.; Coelho, M.C.; Fernandes, P.; Teixeira, J.; Ioannidis, G.; Quartieri, J. Statistical and Semi-Dynamical Road Traffic Noise Models Comparison with Field Measurements. AIP Conf. Proc. 2018, 1982, 020039. [Google Scholar] [CrossRef]
- Rossi, D.; Mascolo, A.; Guarnaccia, C. Calibration and Validation of a Measurements-Independent Model for Road Traffic Noise Assessment. Appl. Sci. 2023, 13, 6168. [Google Scholar] [CrossRef]
- Rossi, D.; Mascolo, A.; Guarnaccia, C. Optimization of Dataset Generation for a Multilinear Regressive Road Traffic Noise Model. Wseas Trans. Environ. Dev. 2023, 19, 1145–1159. [Google Scholar] [CrossRef]
- Rossi, D.; Mascolo, A.; Guarnaccia, C. Road Traffic Noise Predictions by Means of L10 Modelling with a Multilinear Regression Calibrated on Simulated Data. Int. J. Mech. 2023, 17, 51–56. [Google Scholar] [CrossRef]
- Wayson, R.L.; Ogle, T.W.A.; Lindeman, W. Development of Reference Energy Mean Emission Levels for Highway Traffic Noise in Florida. In Transportation Research Record; Transportation Research Board: Washington, DC, USA, 1993; pp. 82–91. [Google Scholar]
- Gauvreau, B. Long-Term Experimental Database for Environmental Acoustics. Appl. Acoust. 2013, 74, 958–967. [Google Scholar] [CrossRef]
- Licitra, G.; Marco, B.; Ricardo, M.; Francesco, B.; Fredianelli, L. CNOSSOS-EU Coefficients for Electric Vehicle Noise Emission. Appl. Acoust. 2023, 211, 109511. [Google Scholar] [CrossRef]
- Nygren, J.; Boij, S.; Rumpler, R.; O’Reilly, C.J. Vehicle-Specific Noise Exposure Cost: Noise Impact Allocation Methodology for Microscopic Traffic Simulations. Transp. Res. Part D Transp. Environ. 2023, 118, 103712. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| REMEL [39] | + 12.700 + 43.967 + 58.270 |
| SonRoad [27] | |
| CNOSSOS [33,34] | given in [33,34] for each vehicle category and each frequency octave band (i) from 63 to 80,000 Hz |
| NMBP [28] | given in [28] for each vehicle category |
| REMEL | SonRoad | CNOSSOS | NMBP | |
|---|---|---|---|---|
| C1 | 10.06 | 10.03 | 10.03 | 10.02 |
| C2 | 10.15 | 12.53 | 15.65 | 12.96 |
| C3 | 1.41 | 3.05 | 0.52 | 3.02 |
| C4 | 0.33 | 0.91 | 0.12 | 1.21 |
| C5 | 3.14 | 3.36 | 1.28 | 2.46 |
| C6 | −12.81 | −12.84 | −12.85 | −12.83 |
| INT | 31.87 | 20.51 | 22.43 | 19.65 |
| REMEL | SonRoad | CNOSSOS | NMBP | |
|---|---|---|---|---|
| Mean [dB(A)] | 0.00 | 0.00 | 0.00 | 0.00 |
| St dev [dB(A)] | 0.89 | 0.64 | 0.59 | 0.45 |
| Median [dB(A)] | −0.06 | −0.07 | −0.04 | −0.05 |
| Mode [dB(A)] | −1.43 | −0.37 | −0.67 | −0.14 |
| Min [dB(A)] | −2.68 | −1.76 | −1.27 | −1.39 |
| Max [dB(A)] | 3.84 | 3.09 | 2.94 | 2.37 |
| Shapiro | 0.98 | 0.97 | 0.97 | 0.98 |
| Skewness | 0.56 | 0.66 | 0.82 | 0.56 |
| Kurtosis | 0.96 | 0.40 | 1.33 | 0.67 |
| REMEL | SonRoad | CNOSSOS | NMBP | |
|---|---|---|---|---|
| Mean [dB(A)] | 0.15 | 2.15 | 2.01 | 2.40 |
| St dev [dB(A)] | 2.15 | 2.19 | 2.24 | 2.18 |
| Median [dB(A)] | −0.02 | 1.95 | 1.87 | 2.24 |
| Min [dB(A)] | −6.15 | −4.12 | −4.29 | −3.85 |
| Max [dB(A)] | 15.20 | 17.00 | 17.42 | 17.42 |
| Shapiro | 0.97 | 0.97 | 0.98 | 0.97 |
| Skewness | 0.67 | 0.71 | 0.53 | 0.67 |
| Kurtosis | 1.79 | 1.96 | 1.24 | 1.85 |
| Measured | REMEL | SonRoad | CNOSSOS | NMBP | |||||
|---|---|---|---|---|---|---|---|---|---|
| Mult. Regr. | w/o Mult. Regr. | Mult. Regr. | w/o Mult. Regr. | Mult. Regr. | w/o Mult. Regr. | Mult. Regr. | w/o Mult. Regr. | ||
| Mean [dB(A)] | 72.09 | 71.93 | 74.59 | 69.94 | 71.03 | 70.08 | 70.97 | 69.68 | 70.23 |
| Std [dB(A)] | 2.00 | 2.35 | 2.42 | 2.38 | 2.46 | 2.53 | 2.48 | 2.42 | 2.47 |
| Median [dB(A)] | 72.47 | 72.46 | 75.10 | 70.48 | 71.58 | 70.62 | 71.33 | 70.23 | 70.74 |
| Shapiro | 0.89 | 0.92 | 0.93 | 0.92 | 0.93 | 0.93 | 0.94 | 0.92 | 0.93 |
| Skewness | −1.69 | −1.25 | −1.14 | −1.25 | −1.11 | −1.15 | −1.14 | −1.23 | −1.10 |
| Kurtosis | 4.87 | 2.49 | 2.05 | 2.50 | 1.78 | 1.83 | 2.22 | 2.31 | 1.77 |
| REMEL | SonRoad | CNOSSOS | NMBP | |||||
|---|---|---|---|---|---|---|---|---|
| Mult. Regr. | w/o Mult. Regr. | Mult. Regr. | w/o Mult. Regr. | Mult. Regr. | w/o Mult. Regr. | Mult. Regr. | w/o Mult. Regr. | |
| MAE [dB(A)] | 1.60 | 2.89 | 2.44 | 1.85 | 2.39 | 1.88 | 2.64 | 2.29 |
| MAPE [%] | 0.02 | 0.04 | 0.03 | 0.03 | 0.03 | 0.03 | 0.04 | 0.03 |
| RMSE [dB(A)] | 2.16 | 3.33 | 3.07 | 2.47 | 3.00 | 2.41 | 3.24 | 2.89 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rossi, D.; Pascale, A.; Mascolo, A.; Guarnaccia, C. Coupling Different Road Traffic Noise Models with a Multilinear Regressive Model: A Measurements-Independent Technique for Urban Road Traffic Noise Prediction. Sensors 2024, 24, 2275. https://doi.org/10.3390/s24072275
Rossi D, Pascale A, Mascolo A, Guarnaccia C. Coupling Different Road Traffic Noise Models with a Multilinear Regressive Model: A Measurements-Independent Technique for Urban Road Traffic Noise Prediction. Sensors. 2024; 24(7):2275. https://doi.org/10.3390/s24072275
Chicago/Turabian StyleRossi, Domenico, Antonio Pascale, Aurora Mascolo, and Claudio Guarnaccia. 2024. "Coupling Different Road Traffic Noise Models with a Multilinear Regressive Model: A Measurements-Independent Technique for Urban Road Traffic Noise Prediction" Sensors 24, no. 7: 2275. https://doi.org/10.3390/s24072275
APA StyleRossi, D., Pascale, A., Mascolo, A., & Guarnaccia, C. (2024). Coupling Different Road Traffic Noise Models with a Multilinear Regressive Model: A Measurements-Independent Technique for Urban Road Traffic Noise Prediction. Sensors, 24(7), 2275. https://doi.org/10.3390/s24072275