


Application of Response Surface-Corrected Finite Element Model and Bayesian Neural Networks to Predict the Dynamic Response of Forth Road Bridges under Strong Winds





Abstract
1. Introduction
2. Methods
2.1. Finite Element Analysis Theory and Model Updating
2.1.1. FEA Theory
2.1.2. FEM Update
- Establish an initial FEM of a bridge;
- Screen the parameters to be corrected and perform the initial fitting of the mean value of the parameters;
- Conduct an experimental analysis (optimal Latin hypercube sampling (LHS));
- Obtain the sample point response ;
- Construct the response surface model;
- Determine the objective function ;
- Optimize the parameters.
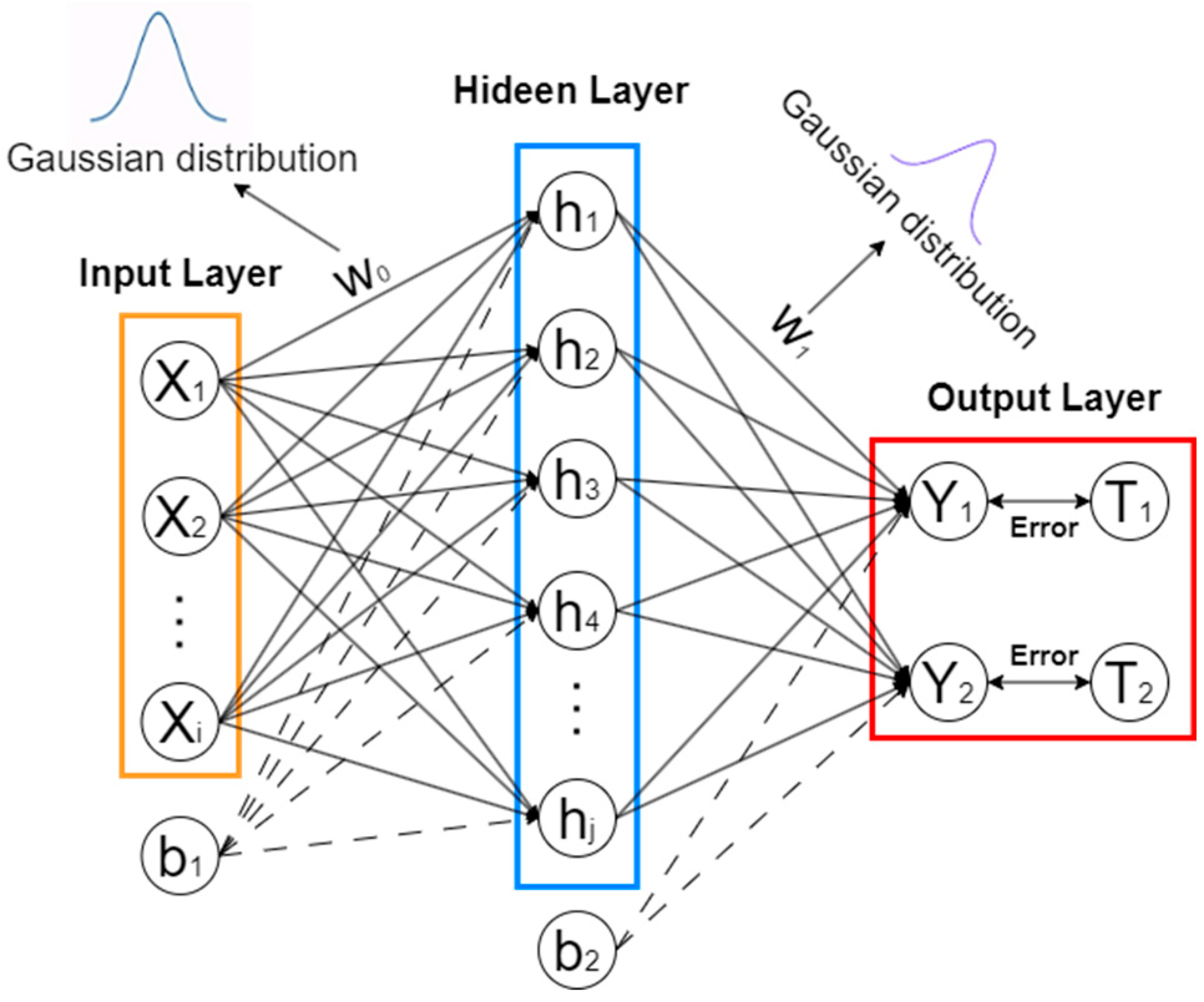
2.2. BNN Theory and Predictions
2.2.1. BNN Theory
2.2.2. BNN Training
2.2.3. BNN Prediction
2.3. Comparison of FEM and BNN Bridge Structure Dynamic Response Prediction Results
3. Case Study
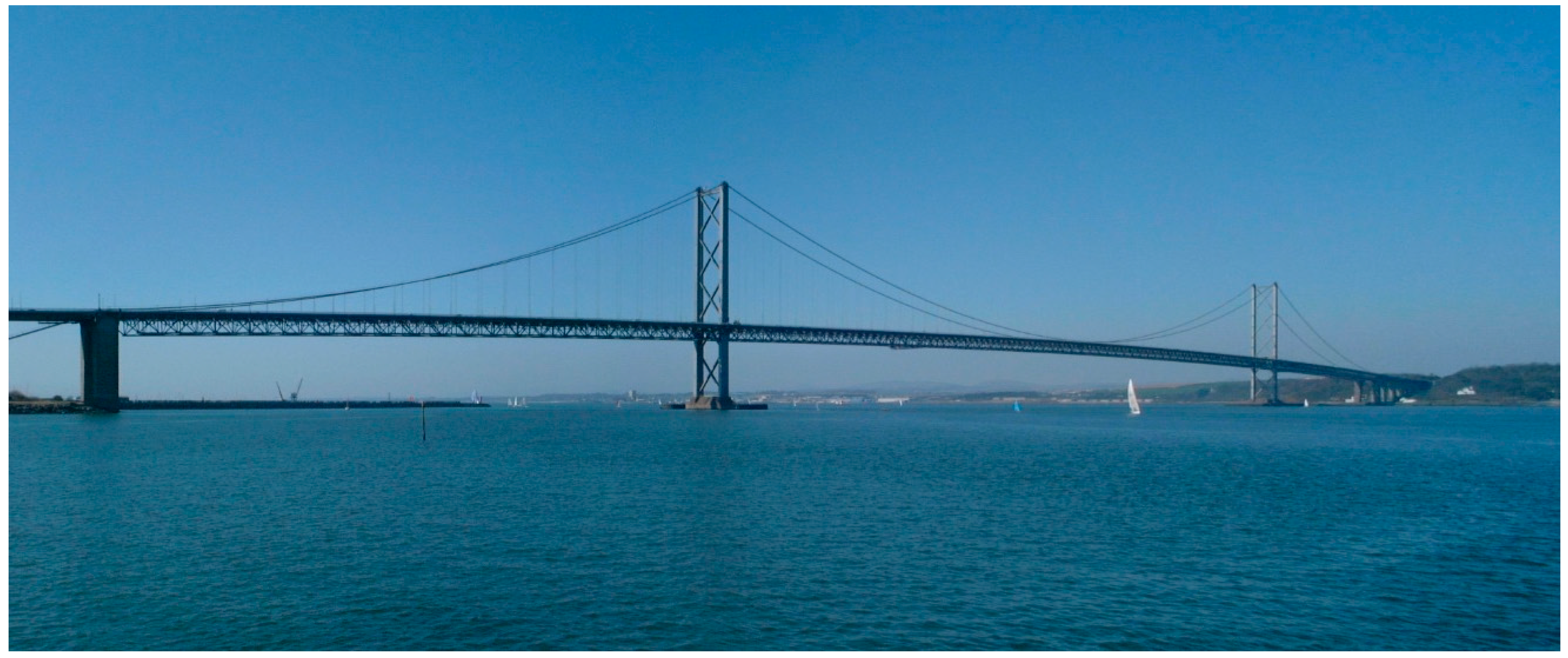
3.1. Overview of the Forth Road Bridge and the GeoSHM Sensor System
3.2. Field Measurements and Wind Characteristics
3.3. Physical Model
3.3.1. Building a Finite Element Model
3.3.2. Construction of the Response Surface Model
3.3.3. Correction Finite Element Model
3.4. BNN Prediction
4. Results
4.1. Displacement Observed via GNSS
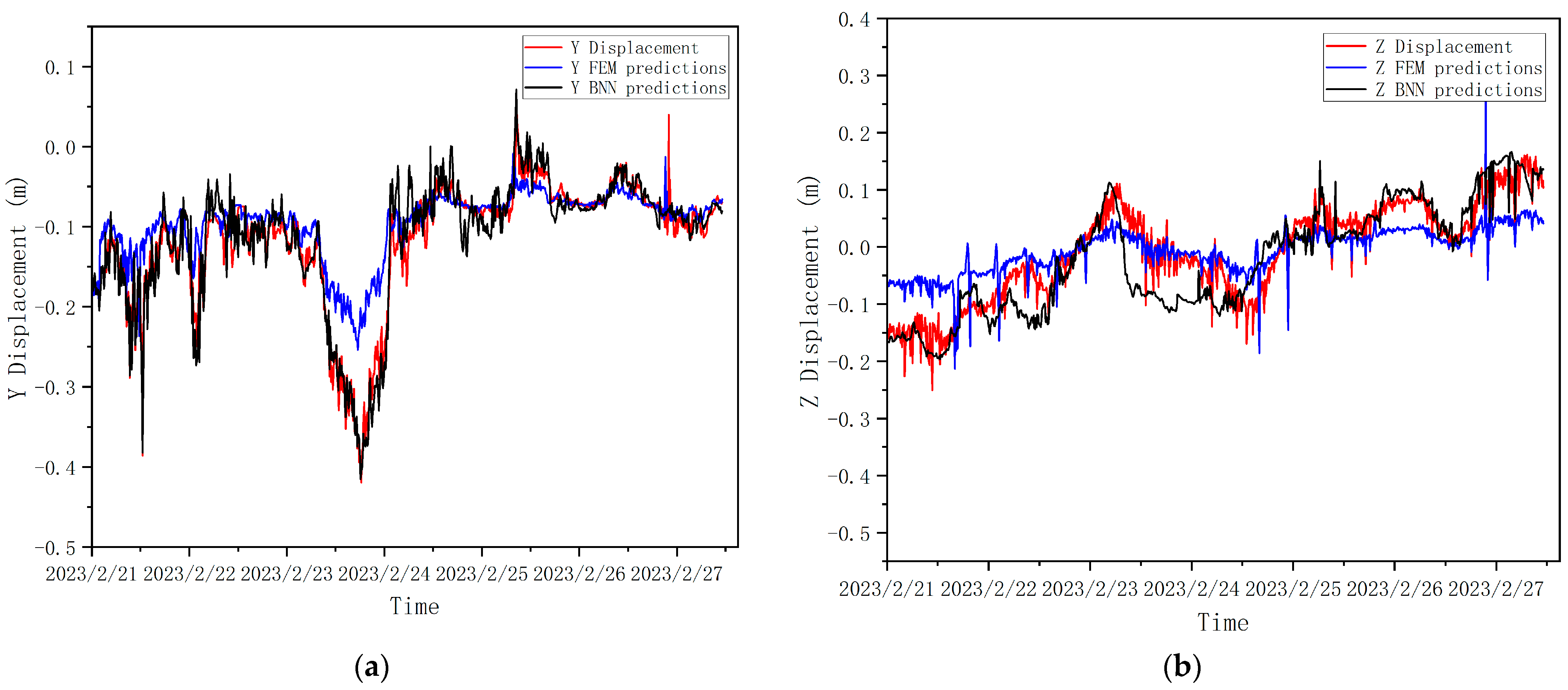
4.2. Displacement Prediction of the BNN Algorithm and FE Model
4.3. Comparison of the Two Drive Modes
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, L.; Shang, Z.; Xia, Y.; Bhowmick, S.; Nagarajaiah, S. Review of bridge structural health monitoring aided by big data and artificial intelligence: From condition assessment to damage detection. J. Struct. Eng. 2020, 146, 04020073. [Google Scholar] [CrossRef]
- Zeng, Y.; Zheng, H.; Jiang, Y.; Ran, J.; He, X. Modal analysis of a steel truss girder cable-stayed bridge with single tower and single cable plane. Appl. Sci. 2022, 12, 7627. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, L.; Sun, L.; Zhao, L.; Cui, W.; Guan, H. Multimode damping optimization of a long-span suspension bridge with damped outriggers for suppressing vortex-induced vibrations. Eng. Struct. 2023, 286, 115959. [Google Scholar] [CrossRef]
- Dan, D.; Li, H. Monitoring, intelligent perception, and early warning of vortex-induced vibration of suspension bridge. Struct. Control Health Monit. 2022, 29, e2928. [Google Scholar] [CrossRef]
- Fujino, Y. Vibration, control and monitoring of long-span bridges—Recent research, developments and practice in Japan. J. Constr. Steel Res. 2002, 58, 71–97. [Google Scholar] [CrossRef]
- Wang, H.; Mao, J.; Xu, Z. Investigation of dynamic properties of a long-span cable-stayed bridge during typhoon events based on structural health monitoring. J. Wind. Eng. Ind. Aerodyn. 2020, 201, 104172. [Google Scholar] [CrossRef]
- Xiao, L.; Huang, Y.; Wei, X. Study on Deflection-Span Ratio of Cable-Stayed Suspension Cooperative System with Single-Tower Space Cable. Infrastructures 2023, 8, 62. [Google Scholar] [CrossRef]
- Hu, P.; Han, Y.; Xu, G.; Cai, C.S.; Cheng, W. Effects of inhomogeneous wind fields on the aerostatic stability of a long-span cable-stayed bridge located in a mountain-gorge terrain. J. Aerospace Eng. 2020, 33, 04020006. [Google Scholar] [CrossRef]
- Montoya, M.C.; Hernández, S.; Kareem, A.; Nieto, F. Efficient modal-based method for analyzing nonlinear aerostatic stability of long-span bridges. Eng. Struct. 2021, 244, 112556. [Google Scholar] [CrossRef]
- Cao, B.; Sarkar, P.P. Time-domain aeroelastic loads and response of flexible bridges in gusty wind: Prediction and experimental validation. J. Eng. Mech. 2013, 139, 359–366. [Google Scholar] [CrossRef]
- Wu, B.; Wang, Q.; Liao, H.; Mei, H. Hysteresis response of nonlinear flutter of a truss girder: Experimental investigations and theoretical predictions. Comput. Struct. 2020, 238, 106267. [Google Scholar] [CrossRef]
- Hong, A.L.; Ubertini, F.; Betti, R. Wind analysis of a suspension bridge: Identification and finite-element model simulation. J. Struct. Eng. 2011, 137, 133–142. [Google Scholar] [CrossRef]
- Wang, L.; Jiang, P. Numerical computation for vibration characteristics of long-span bridges with considering vehicle-wind coupling excitations based on finite element and neural network models. J. Vibroeng. 2017, 19, 2106–2125. [Google Scholar] [CrossRef][Green Version]
- Zhao, S.; Chen, J.; Yue, J.; Yan, Z.; Liu, J.; Zhang, B.; Chen, J. Sectional model wind tunnel test and research on the wind-induced vibration response of a curved beam unilateral stayed bridge. Buildings 2022, 12, 1643. [Google Scholar] [CrossRef]
- Su, J.; Sun, Y.; Liu, Y. Complexity study on the unsteady flow field and aerodynamic noise of high-speed railways on bridges. Complexity 2018, 2018, 7162731. [Google Scholar] [CrossRef]
- Feng, J.; Gao, K.; Gao, W.; Liao, Y.; Wu, G. Machine learning-based bridge cable damage detection under stochastic effects of corrosion and fire. Eng. Struct. 2022, 264, 114421. [Google Scholar] [CrossRef]
- Cao, Y.; Li, B.; Xiang, Q.; Zhang, Y. Experimental Analysis and Machine Learning of Ground Vibrations Caused by an Elevated High-Speed Railway Based on Random Forest and Bayesian Optimization. Sustainability 2023, 15, 12772. [Google Scholar] [CrossRef]
- Liu, J.; Wu, H.; Sun, Q. Research on the Prediction of Rigid Frame-Continuous Girder Bridge Deflection Using BP and RBF Neural Networks. Stavební Obz. Civ. Eng. J. 2023, 32, 257–270. [Google Scholar] [CrossRef]
- Bengio, Y.; Goodfellow, I.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2017; Volume 1. [Google Scholar]
- Ogrizovic, J.; Wanninger, F.; Frangi, A. Experimental and analytical analysis of moment-resisting connections with glued-in rods. Eng. Struct. 2017, 145, 322–332. [Google Scholar] [CrossRef]
- Huang, M.; Zhang, J.; Hu, J.; Ye, Z.; Deng, Z.; Wan, N. Nonlinear modeling of temperature-induced bearing displacement of long-span single-pier rigid frame bridge based on DCNN-LSTM. Case Stud. Therm. Eng. 2024, 53, 103897. [Google Scholar] [CrossRef]
- Yessoufou, F.; Zhu, J. Classification and regression-based convolutional neural network and long short-term memory configuration for bridge damage identification using long-term monitoring vibration data. Struct. Health Monit. 2023, 22, 4027–4054. [Google Scholar] [CrossRef]
- Sun, Z.; Sun, M.; Siringoringo, D.M.; Dong, Y.; Lei, X. Predicting bridge longitudinal displacement from monitored operational loads with hierarchical CNN for condition assessment. Mech. Syst. Signal Pract. 2023, 200, 110623. [Google Scholar] [CrossRef]
- Deng, Y.; Ju, H.; Zhai, W.; Li, A.; Ding, Y. Correlation model of deflection, vehicle load, and temperature for in-service bridge using deep learning and structural health monitoring. Struct. Control Health Monit. 2022, 29, e3113. [Google Scholar] [CrossRef]
- Wang, Z.; Lu, X.; Zhang, W.; Fragkoulis, V.C.; Zhang, Y.; Beer, M. Deep learning-based prediction of wind-induced lateral displacement response of suspension bridge decks for structural health monitoring. J. Wind. Eng. Ind. Aerodyn. 2024, 247, 105679. [Google Scholar] [CrossRef]
- Meng, X.; Xiang, Z.; Xie, Y.; Ye, G.; Psimoulis, P.; Wang, Q.; Yang, M.; Yang, Y.; Ge, Y.; Wang, S. A discussion on the uses of smart sensory network, cloud-computing, digital twin and artificial intelligence for the monitoring of long-span bridges. In Proceedings of the 5th Joint International Symposium on Deformation Monitoring, València, Spain, 20–22 June 2022. [Google Scholar]
- Dang, H.V.; Tatipamula, M.; Nguyen, H.X. Cloud-based digital twinning for structural health monitoring using deep learning. IEEE Trans. Ind. Inform. 2021, 18, 3820–3830. [Google Scholar] [CrossRef]
- Jiang, F.; Ma, L.; Broyd, T.; Chen, K. Digital twin and its implementations in the civil engineering sector. Autom. Constr. 2021, 130, 103838. [Google Scholar] [CrossRef]
- Kang, J.; Chung, K.; Hong, E.J. Multimedia knowledge-based bridge health monitoring using digital twin. Multimed. Tools Appl. 2021, 80, 34609–34624. [Google Scholar] [CrossRef]
- Ye, C.; Butler, L.; Calka, B.; Iangurazov, M.; Lu, Q.; Gregory, A.; Girolami, M.; Middleton, C. A digital twin of bridges for structural health monitoring. In Proceedings of the 12th International Workshop on Structural Health Monitoring, Stanford, CA, USA, 10–12 September 2019. [Google Scholar]
- Seventekidis, P.; Giagopoulos, D.; Arailopoulos, A.; Markogiannaki, O. Structural Health Monitoring using deep learning with optimal finite element model generated data. Mech. Syst. Signal Pract. 2020, 145, 106972. [Google Scholar] [CrossRef]
- Yu, J.; Song, Y.; Tang, D.; Dai, J. A Digital Twin approach based on nonparametric Bayesian network for complex system health monitoring. J. Manuf. Syst. 2021, 58, 293–304. [Google Scholar] [CrossRef]
- Jiang, F.; Ding, Y.; Song, Y.; Geng, F.; Wang, Z. Digital Twin-driven framework for fatigue life prediction of steel bridges using a probabilistic multiscale model: Application to segmental orthotropic steel deck specimen. Eng. Struct. 2021, 241, 112461. [Google Scholar] [CrossRef]
- Psimoulis, P.; Meng, X.; Owen, J.; Xie, Y.; Nguyen, D.T.; Ye, J. GNSS and earth observation for structural health monitoring (GeoSHM) of the forth road bridge. In Proceedings of the Conference on Smart Monitoring Assessment and Rehabilitation of Civil Structures (SMAR 2017), Zurich, Switzerland, 13–15 September 2017; pp. 13–15. [Google Scholar]
- Hilber, H.M.; Hughes, T.J.; Taylor, R.L. Improved numerical dissipation for time integration algorithms in structural dynamics. Earthq. Eng. Struct. Dyn. 1977, 5, 283–292. [Google Scholar] [CrossRef]
- Shimpi, V.; Sivasubramanian, M.V.; Singh, S.B. Integrating response surface methodology and finite element analysis for model updating and damage assessment of multi-arch gallery masonry bridges. Sādhanā 2024, 49, 33. [Google Scholar] [CrossRef]
- Thai, H.; Kim, S. Nonlinear static and dynamic analysis of cable structures. Finite Elem. Anal. Des. 2011, 47, 237–246. [Google Scholar] [CrossRef]
- Costa-Carrapiço, I.; Raslan, R.; González, J.N. A systematic review of genetic algorithm-based multi-objective optimisation for building retrofitting strategies towards energy efficiency. Energy Build. 2020, 210, 109690. [Google Scholar] [CrossRef]
- Wang, Y.B.; Wang, L. Finite Element Model Modification of an Arch Bridge Based on Response Surface Method. In Proceedings of the 2019 3rd International Conference on Energy Material, Chemical Engineering and Mining Engineering, Qingdao, China, 28–29 December 2019; p. 022002. [Google Scholar]
- Lalwani, S.; Singhal, S.; Kumar, R.; Gupta, N. A comprehensive survey: Applications of multi-objective particle swarm optimization (MOPSO) algorithm. Trans. Comb. 2013, 2, 39–101. [Google Scholar]
- Stocki, R. A method to improve design reliability using optimal Latin hypercube sampling. Comput. Assist. Mech. Eng. Sci. 2005, 12, 393. [Google Scholar]
- Bishop, C. Pattern recognition and machine learning. Springer Google Sch. 2006, 2, 531–537. [Google Scholar]
- Meng, X.; Nguyen, D.T.; Owen, J.S.; Xie, Y.; Psimoulis, P.; Ye, G. Application of GeoSHM system in monitoring extreme wind events at the forth Road Bridge. Remote Sens. 2019, 11, 2799. [Google Scholar] [CrossRef]
- Meng, X.; Nguyen, D.T.; Xie, Y.; Owen, J.S.; Psimoulis, P.; Ince, S.; Chen, Q.; Ye, J.; Bhatia, P. Design and implementation of a new system for large bridge monitoring—GeoSHM. Sensors 2018, 18, 775. [Google Scholar] [CrossRef]
- Xin, J.; Zhou, J.; Yang, S.X.; Li, X.; Wang, Y. Bridge structure deformation prediction based on GNSS data using Kalman-ARIMA-GARCH model. Sensors 2018, 18, 298. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural | Materials | Elastic Modulus (Pa) | Volumetric Weight (kg/m3) | Poisson’s Ratio |
|---|---|---|---|---|
| Girder | Steel | 2.000 × 108 | 76.9729 | 0.3 |
| Main-span deck | Steel | 2.100 × 108 | 56.34 | 0.3 |
| Side-span deck | Concrete | 2.4855578 × 107 | 23.563 | 0.2 |
| Tower | Steel | 2.000 × 108 | 76.9729 | 0.3 |
| Suspension cable | Steel wire | 1.931 × 1012 | 78.075 | 0.3 |
| Parameter | (×107) | (×108) | (×1012) | |||
|---|---|---|---|---|---|---|
| Upper limit | 26.610 | 2.950 | 85.460 | 2.300 | 84.110 | 2.100 |
| Lower limit | 18.870 | 2.000 | 65.490 | 1.700 | 72.040 | 1.770 |
| Initial value | 23.563 | 2.485 | 76.973 | 2.000 | 78.075 | 1.931 |
| H1 | V1 | H2 | V2 | V3 | |
|---|---|---|---|---|---|
| 0.9498 | 0.9911 | 0.9174 | 0.9520 | 0.9533 | |
| RMSM | 0.0015 | 0.0019 | 0.2811 | 0.0053 | 0.0183 |
| Input/Loading | Output/Responses | |
|---|---|---|
| Traffic | GPS week Seconds within a week | Lateral and heaving displacement |
| Day of the year | ||
| Environment | Normal component of wind speed | |
| Pressure Temperature Humidity | ||
| Sensor | Rate (Hz) | Manufacturer | Comments |
|---|---|---|---|
| GNSS | 10 | Leica/UbiPOS | 3D deformation (X, Y, and Z) |
| Anemometer | 10 | Gill | Wind direction and speed |
| Meteorometer | 1 | Gill | Temperature, humidity, and pressure |
| FEM Y | FEM Z | BNN Y | BNN Z | |
|---|---|---|---|---|
| RMSE | 0.0471 | 0.0514 | 0.0232 | 0.0464 |
| 0.6167 | 0.6283 | 0.9073 | 0.7969 |
| Drive Modes | Predictive Accuracy | Computational Efficiency | Data Requirements | System Complexity | Interpretability | Comprehensiveness |
|---|---|---|---|---|---|---|
| BNN | high | fast | large number of data | low | low | single objective function |
| FEM | low | slow | accurate bridge geometry, material properties, connection characteristics | high | high | displacement response, stress response, vibration response, dynamic response, damage analysis of structural elements |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Meng, X.; Hu, L.; Bao, Y.; Hancock, C. Application of Response Surface-Corrected Finite Element Model and Bayesian Neural Networks to Predict the Dynamic Response of Forth Road Bridges under Strong Winds. Sensors 2024, 24, 2091. https://doi.org/10.3390/s24072091
Liu Y, Meng X, Hu L, Bao Y, Hancock C. Application of Response Surface-Corrected Finite Element Model and Bayesian Neural Networks to Predict the Dynamic Response of Forth Road Bridges under Strong Winds. Sensors. 2024; 24(7):2091. https://doi.org/10.3390/s24072091
Chicago/Turabian StyleLiu, Yan, Xiaolin Meng, Liangliang Hu, Yan Bao, and Craig Hancock. 2024. "Application of Response Surface-Corrected Finite Element Model and Bayesian Neural Networks to Predict the Dynamic Response of Forth Road Bridges under Strong Winds" Sensors 24, no. 7: 2091. https://doi.org/10.3390/s24072091
APA StyleLiu, Y., Meng, X., Hu, L., Bao, Y., & Hancock, C. (2024). Application of Response Surface-Corrected Finite Element Model and Bayesian Neural Networks to Predict the Dynamic Response of Forth Road Bridges under Strong Winds. Sensors, 24(7), 2091. https://doi.org/10.3390/s24072091