

Detection of a Submillimeter Notch-Type Defect at Multiple Orientations by a Lamb Wave A0 Mode at 550 kHz for Long-Range Structural Health Monitoring Applications



Abstract
1. Introduction
- (1)
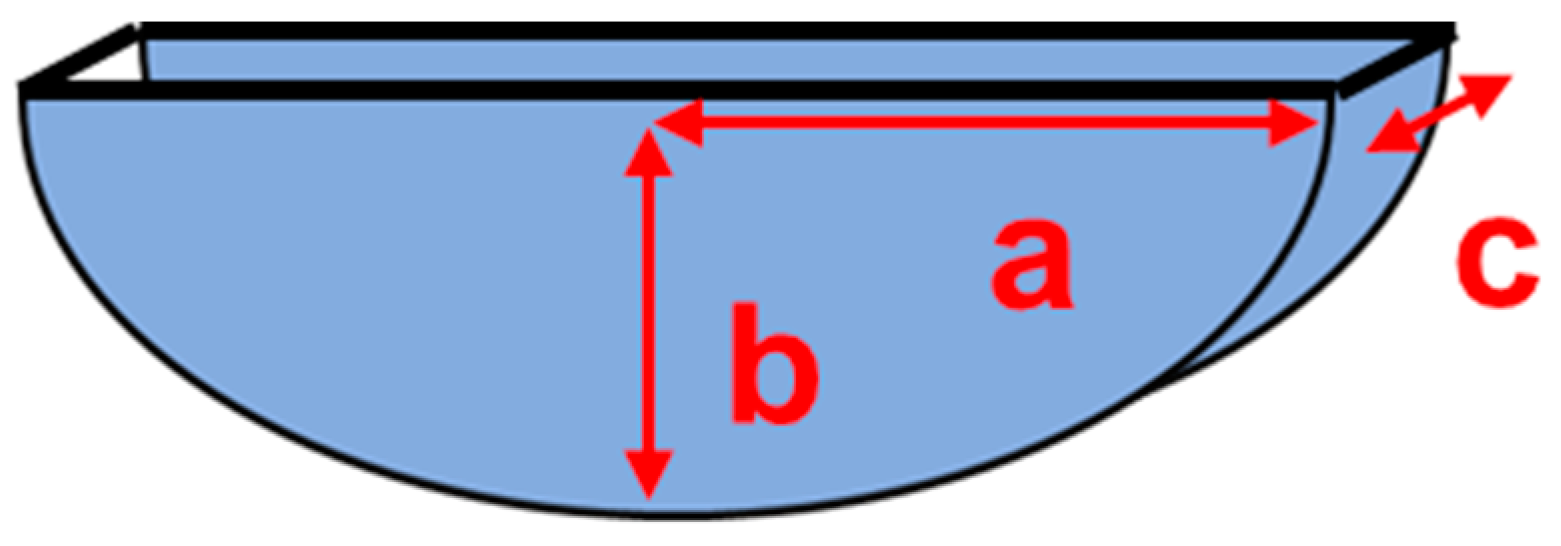
- The size of the defects is often a few wavelengths which at the typical working frequencies of UGWs (100 kHz–1 MHz), correspond to the minimum dimensions of several millimeters. It is often assumed that the shape of the defects is cylindrical, represented by blind holes or through holes within a laminate which is typically assumed to be between 1 and 10 mm thick [11,12,13]. In other cases, a through cut shape is assumed to simulate a notch-type defect and also with a depth less than the thickness of the laminate [14,15].
- (2)
- The distance of the defect from the transducer should in principle be as high as possible to reduce the number of transducers in the SHM system and at the same time ensure the detectability of the defect and its progression over time. Some works published in the literature assumed defects in laminate material at a distance from the transducers ranging from 50 cm [15] to 100 cm [11,16]. The choice of mode S0 or A0 is essential for long distances and is determined by the defect type, dimensions, laminate material attenuation, and boundary conditions [7].
2. Analysis of Scattering from Artificial Defects in Metal Laminates for the Selection of the Probing Lamb Wave Mode
- To have a significant scattering response from a defect, the characteristic defect size (scattering cross section) must be of the order of the wavelength of the incident mode.
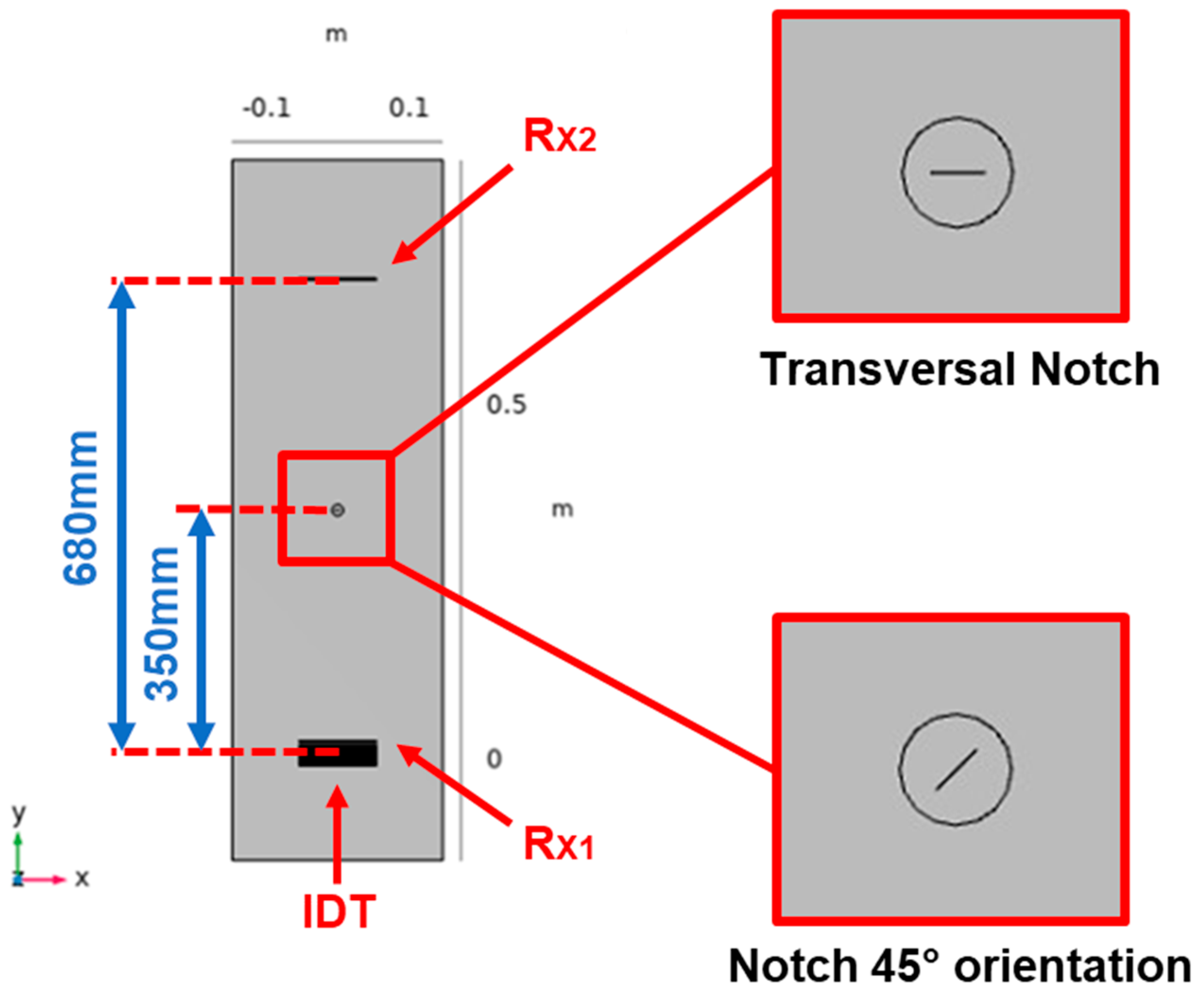
- For notch-type defects, the backscatter is very limited when the direction of the defect is on axis with the transducer, i.e., when the notch is longitudinal with respect to the direction of the incident beam.
- The decay of the amplitude of the scattering wave is inversely proportional to the square root of the distance.
- For a given UGW wavelength, it is necessary to estimate the directions with higher intensity of the reflection coefficient for the selected probing UGW.
- Check by simulations whether the scattering directions are compatible with the directivities of the UGW transducers.
- Compare the forward and backward scattering amplitudes for a given defect orientations to decide the most favorable transducers configuration: pulse-echo or pitch-catch or both.
- Attenuation in the aluminum material;
- Ratio between the wavelength and the laminate thickness;
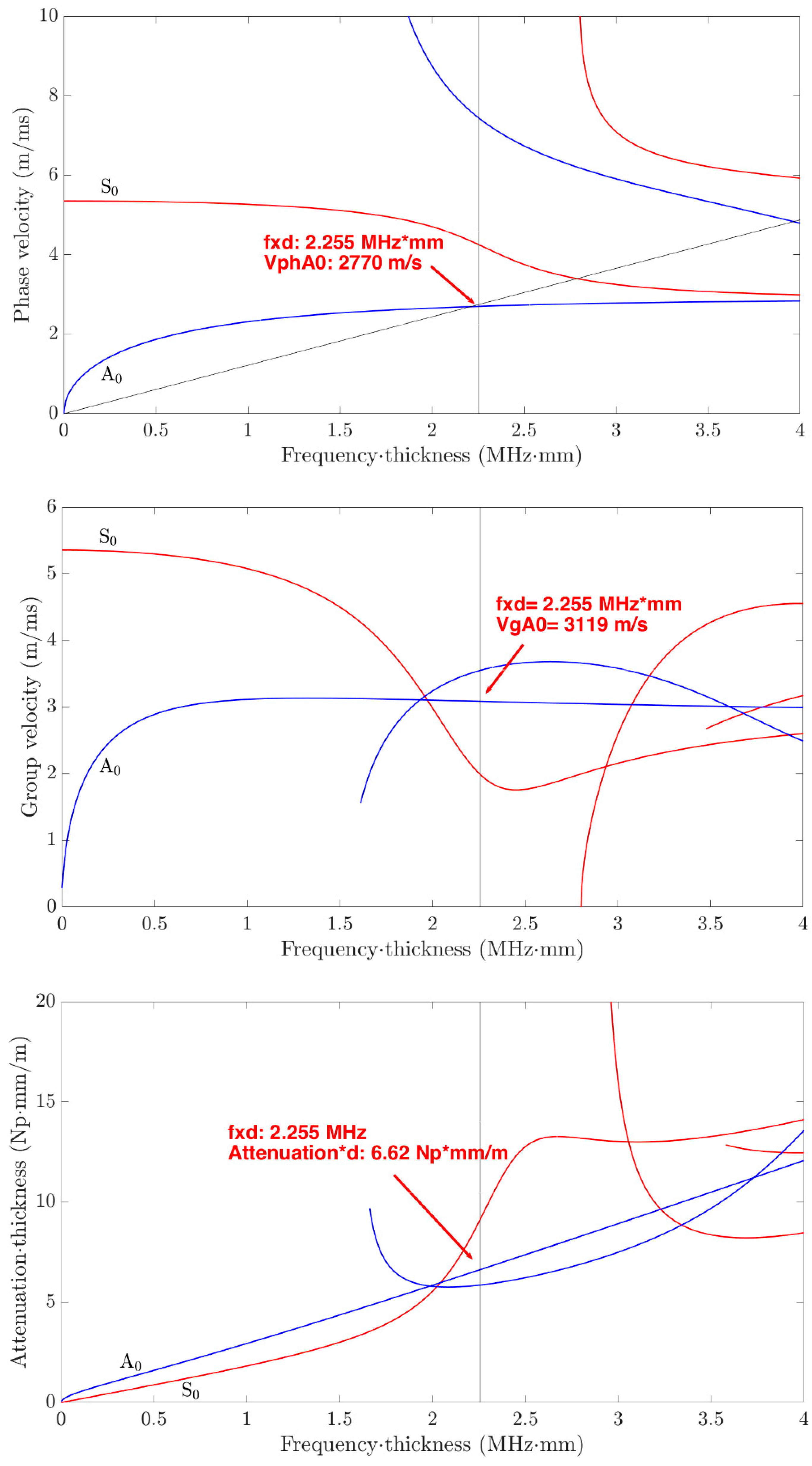
- Phase and group velocity dispersion curves.
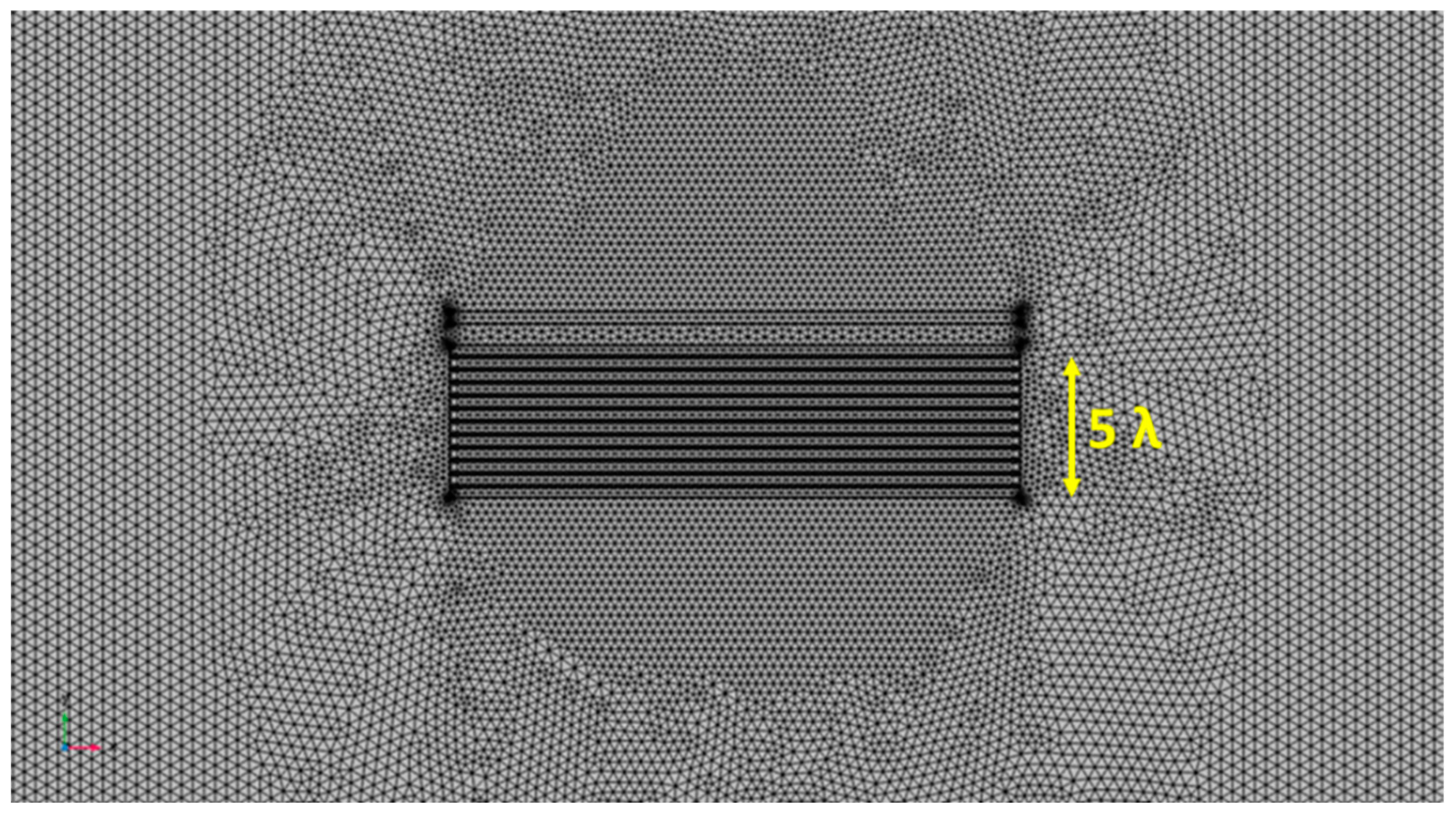
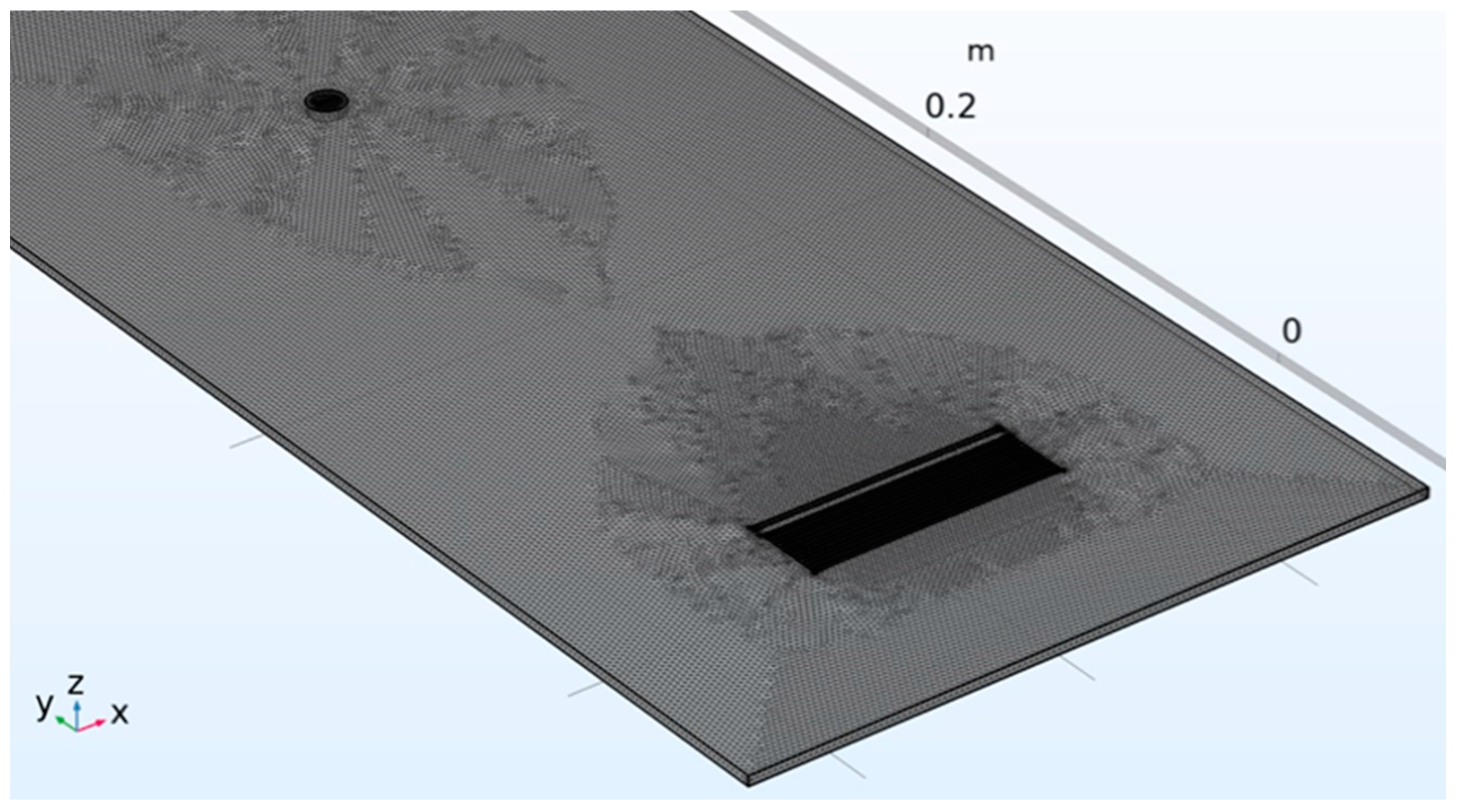
3. FEM of a Submillimeter Notch-Type Defect and IDT Transducers
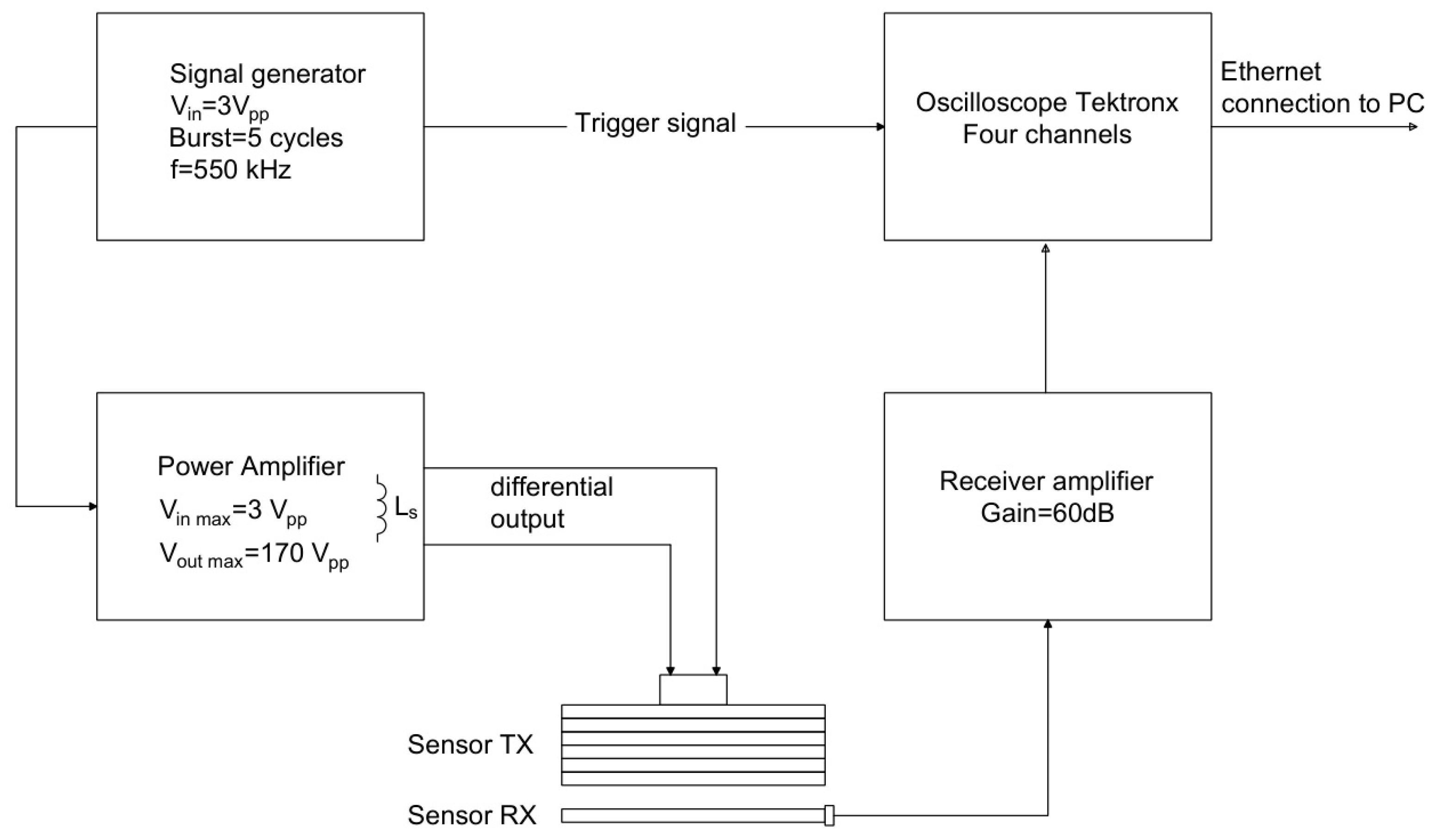
- The first is that using two different chains between transmission and reception for the setup of the experimental electronics avoids having reception blind spots due to the latency of the switch operation from transmission to reception, which would lead to the system not being able to detect defects near the transmitter.
- The second motivation is to release the specification of high mode selectivity. The incident mode can be converted in other modes with different signal spectral content due to the interaction with the defect. In this case, the single element receiver can provide more information about the defect and its progression [15].
4. FEM of the Pulse-Echo and Pitch-Catch System
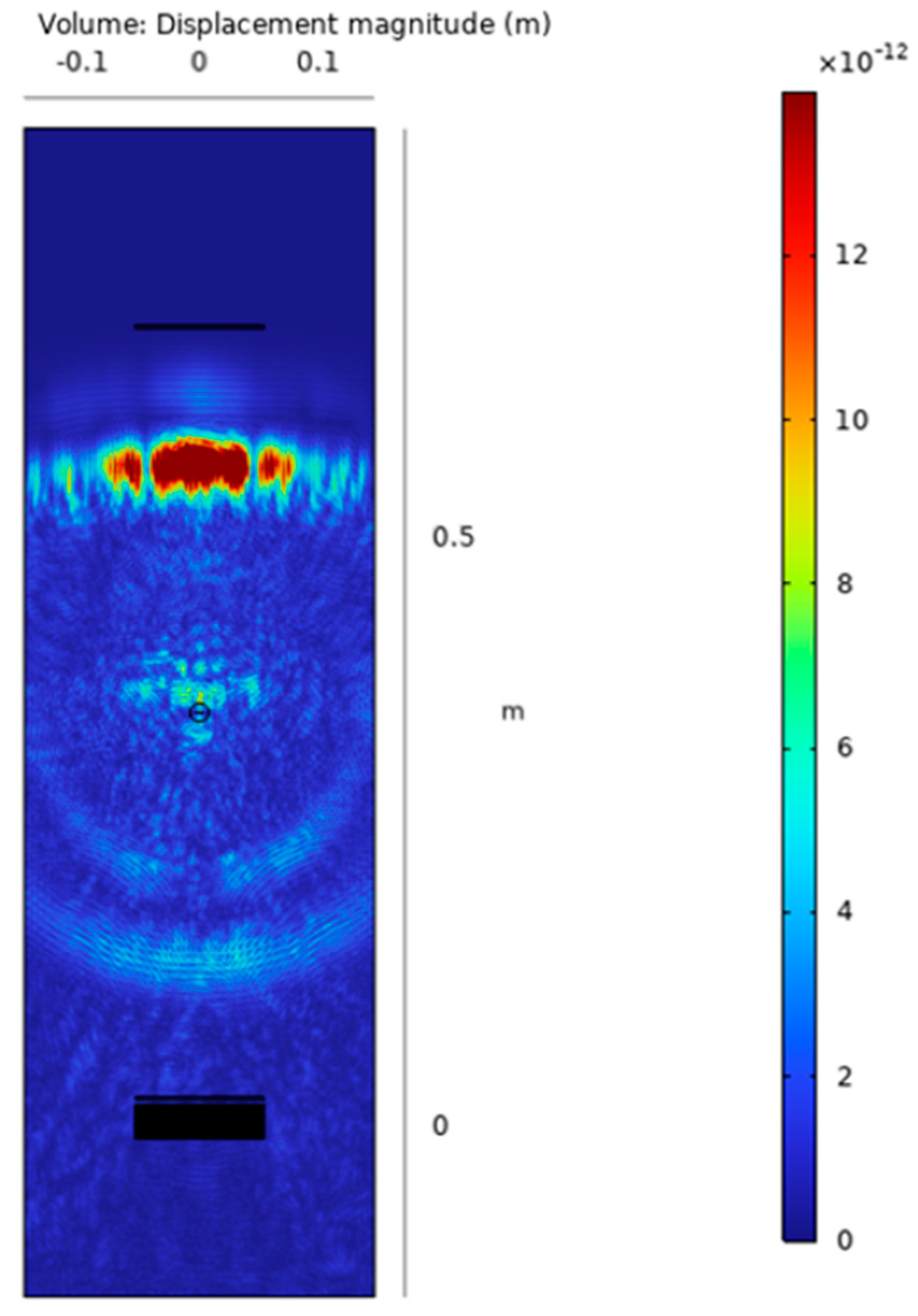
5. Simulated Results
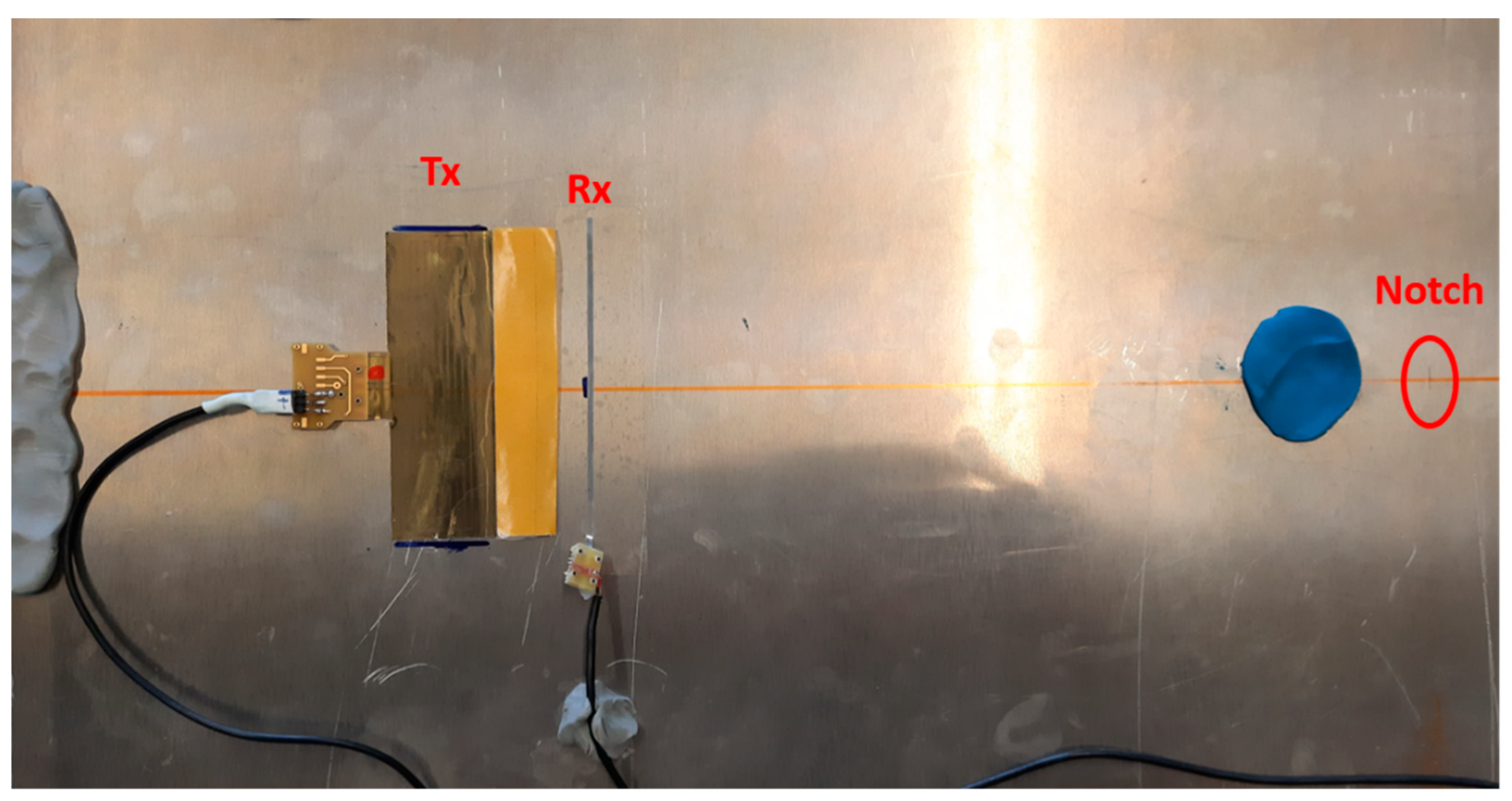
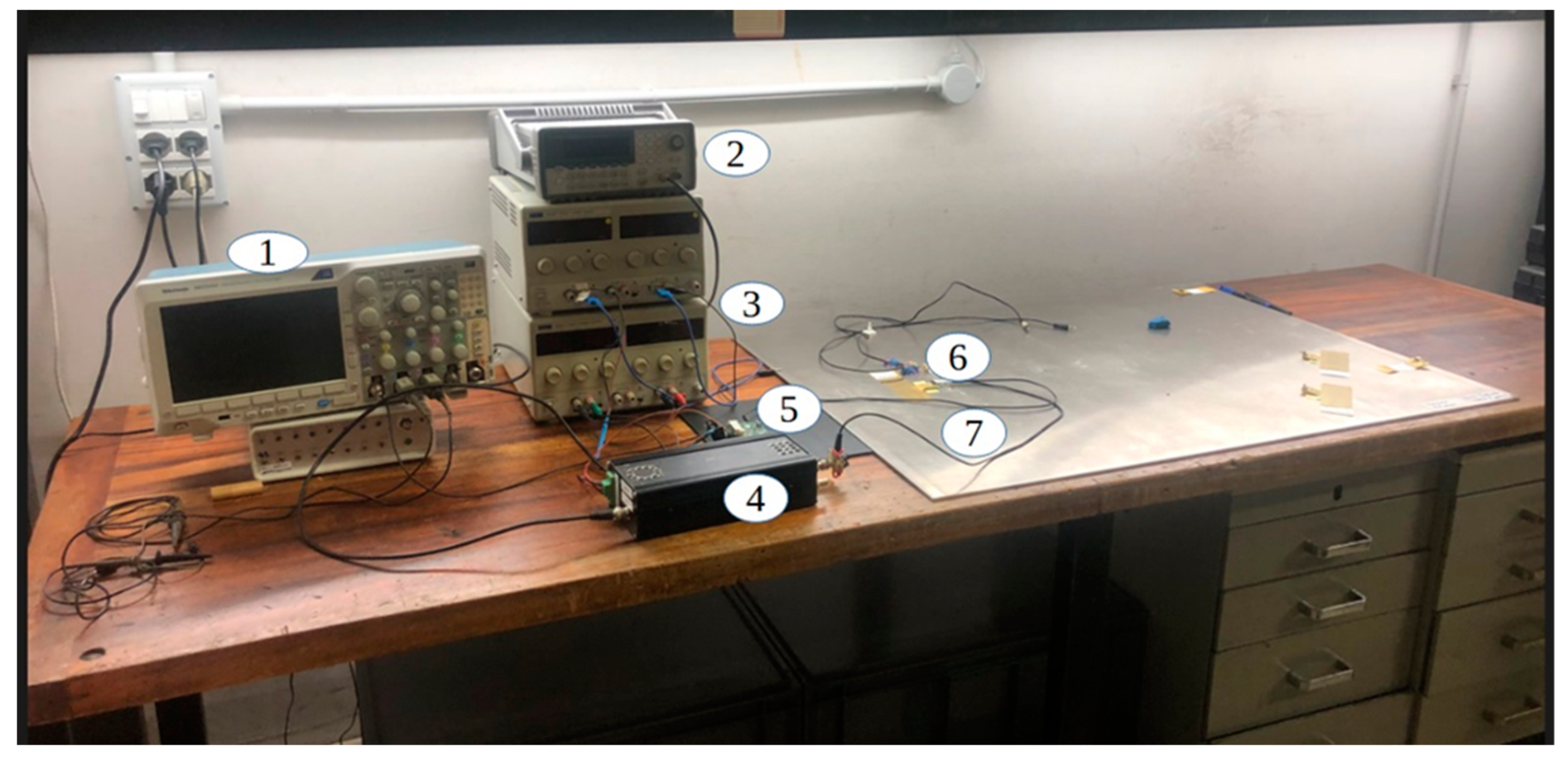
6. Experimental Set Up and Signal Processing for Defect Detection
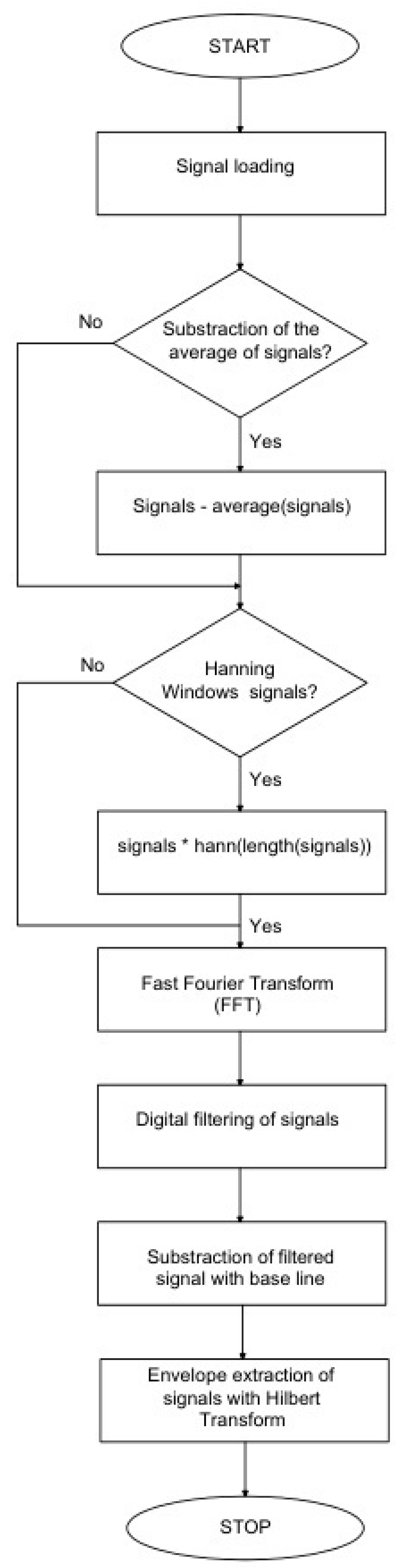
- Signal preprocessing;
- Parameters calculation from ultrasonic signals;
- Baseline method for damage detection.
7. Comparison of Simulated and Experimental Responses in Pulse-Echo Configuration
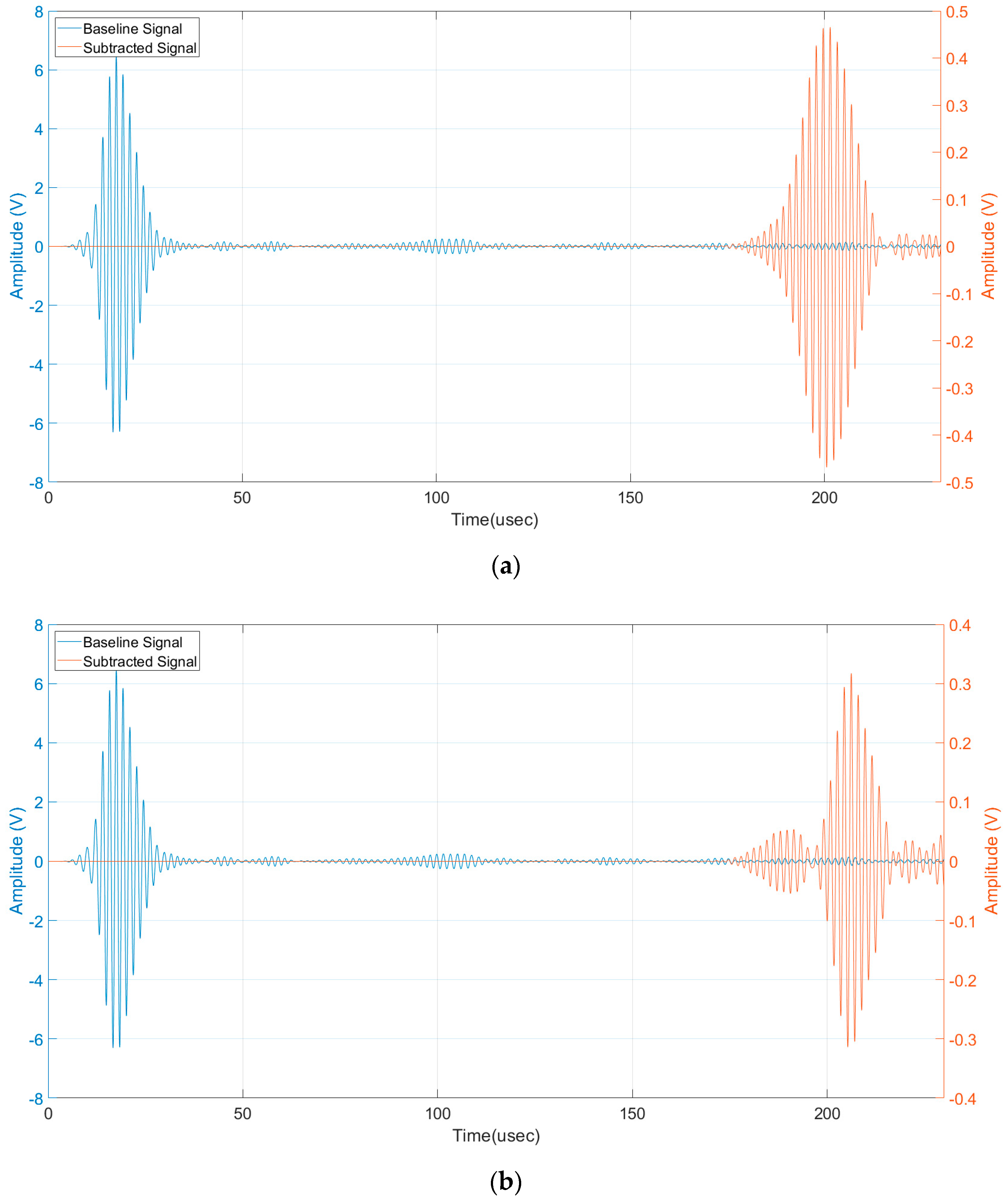
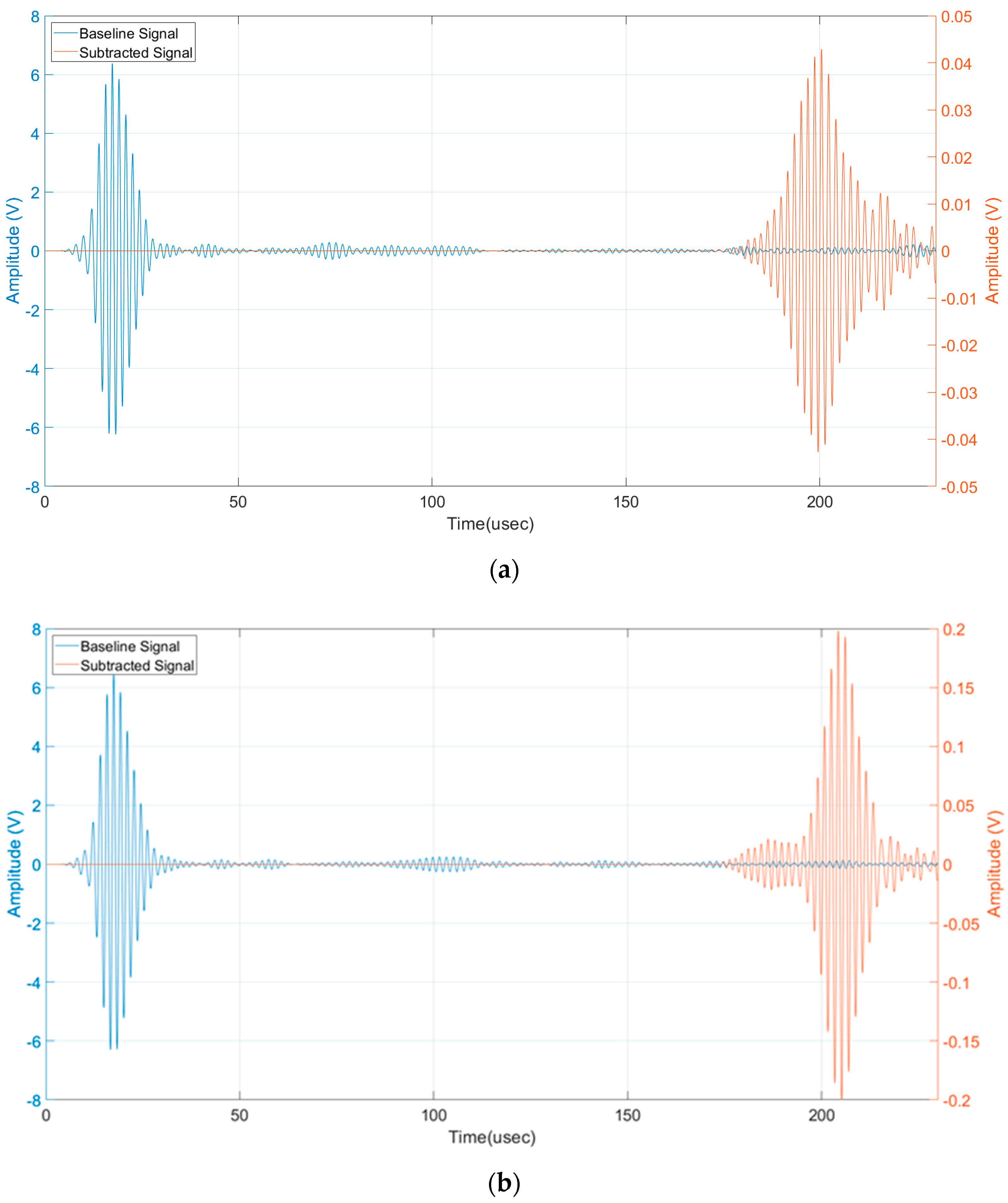
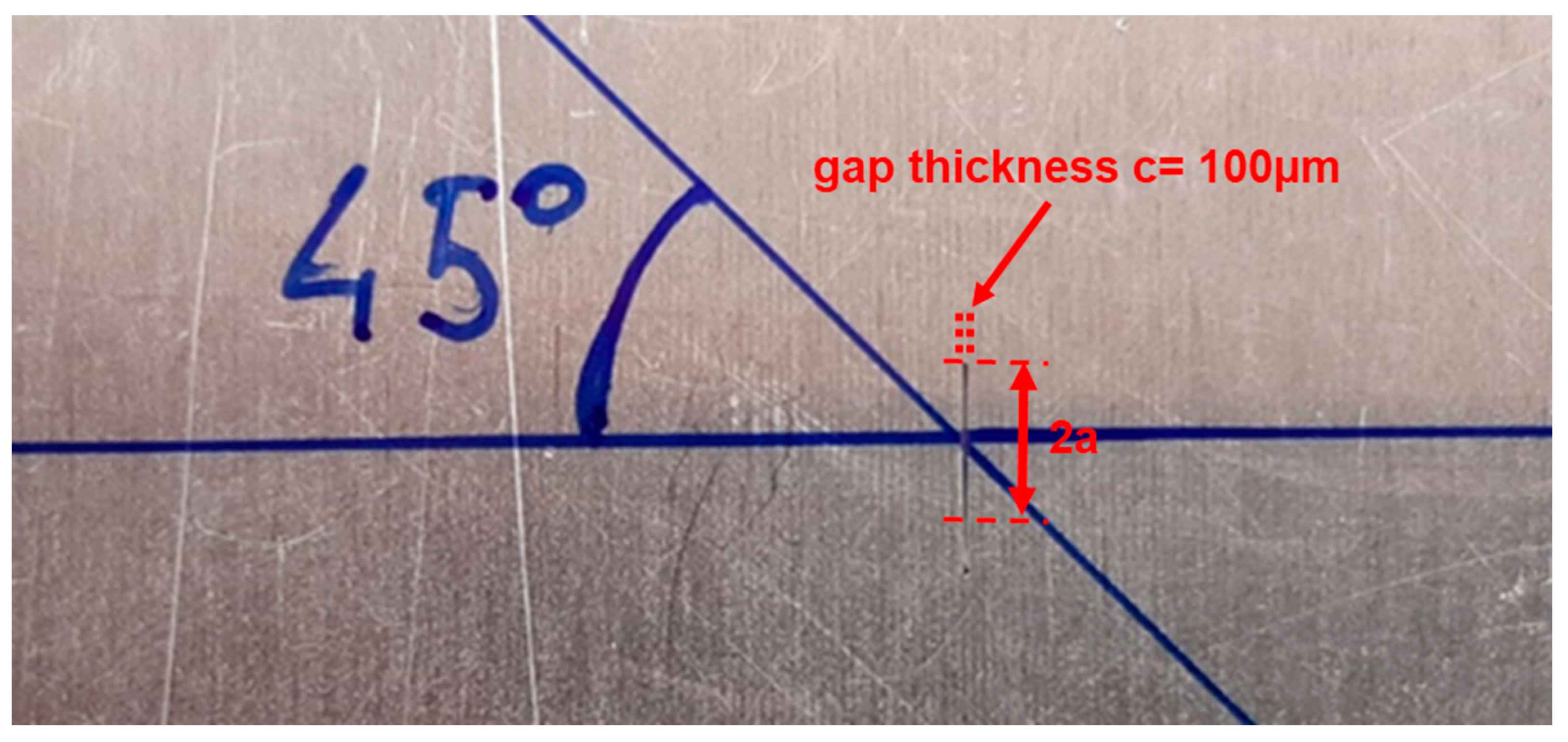
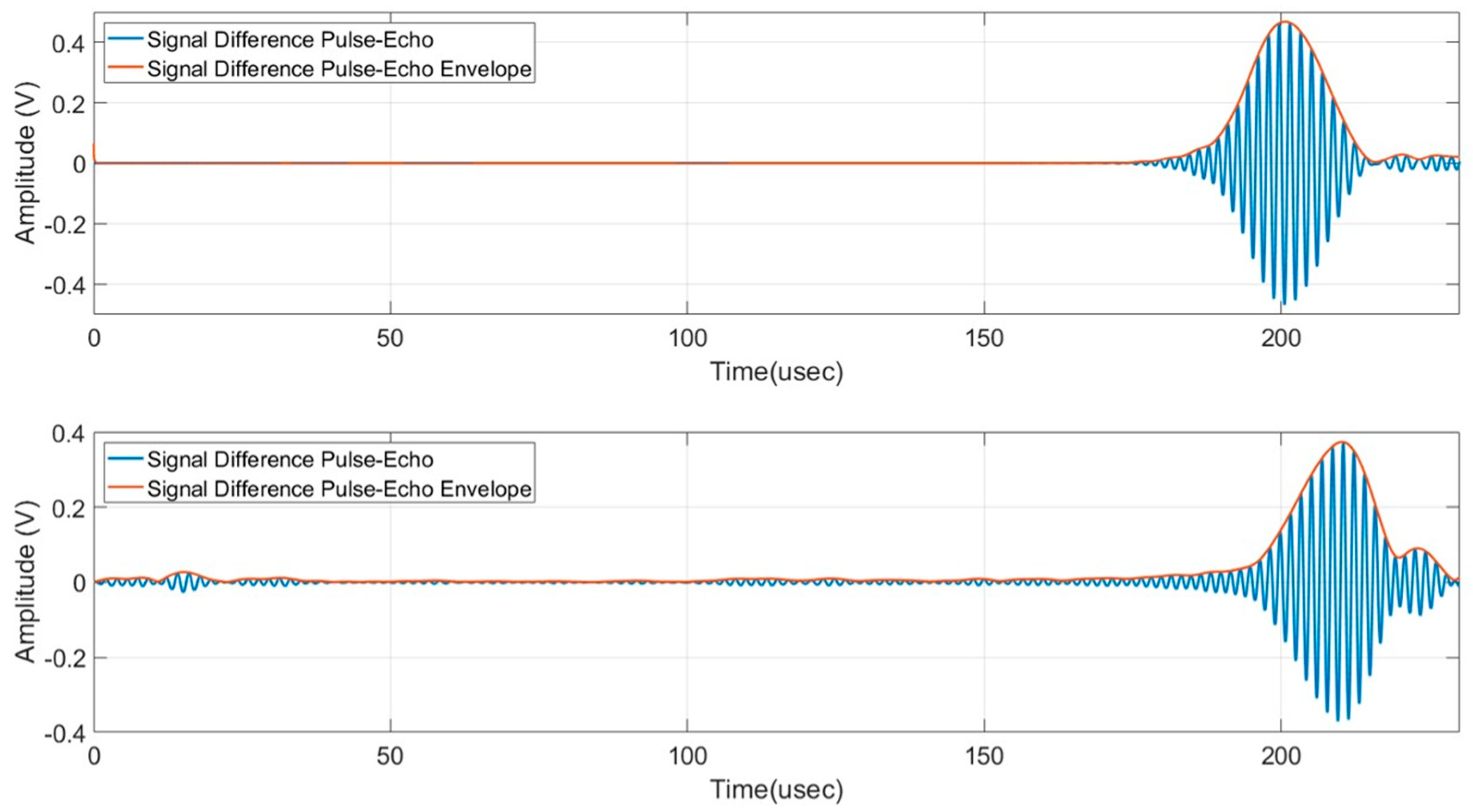
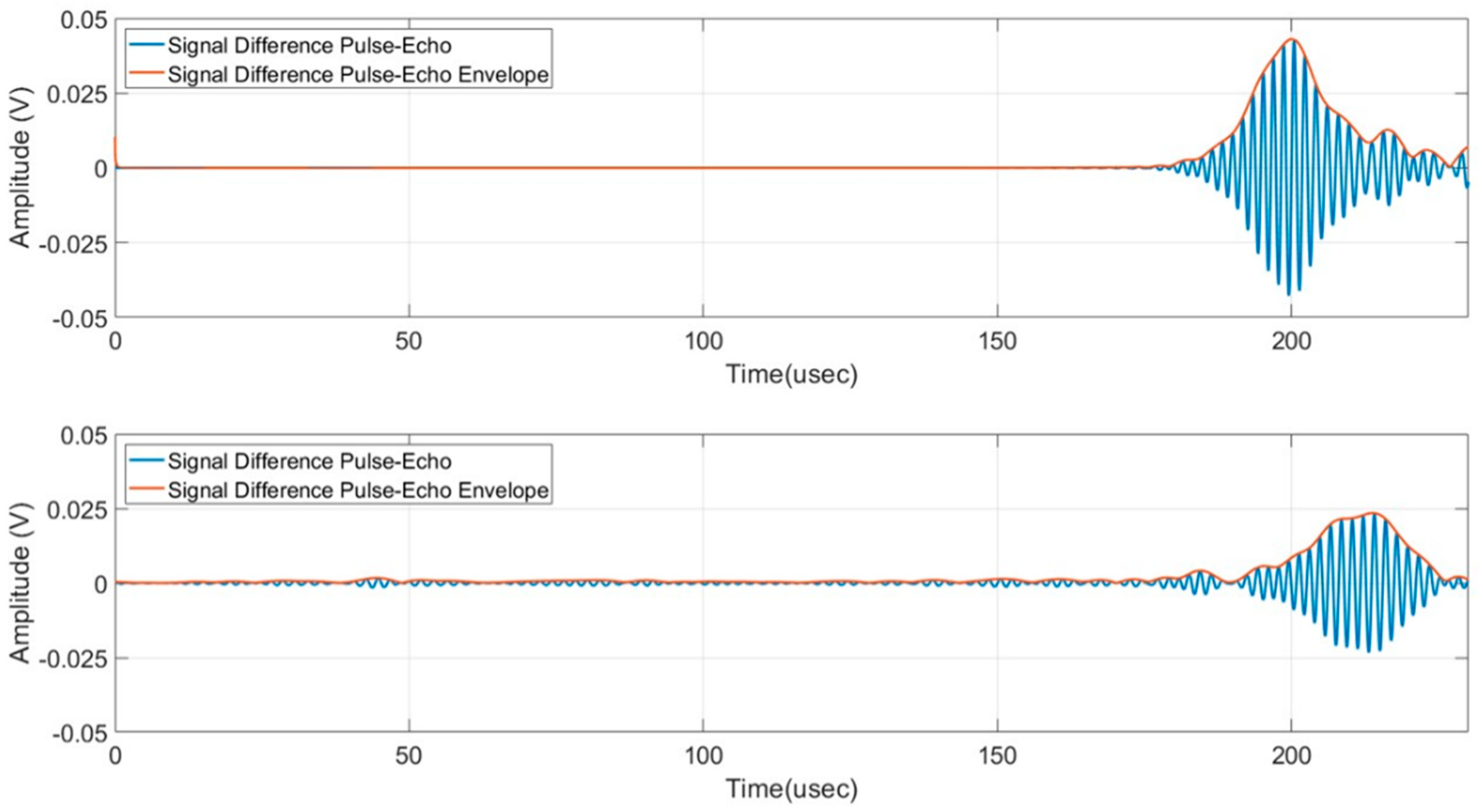
- The maximum amplitudes and the shape of the enveloped signals agree very well for the case at 0° while the experimental signal for the case of 45° has a −6 dB amplitude with respect to the simulated one. In all cases, the main detected signal is the A0 mode, and no mode conversion is present. The latter observation is important because the detection can be implemented with a threshold based on a single mode signal; it is worth noticing that, for example, a −6 dB threshold can be adequate for the low noise level of the designed analog front end employed in this work.
- There is a discrepancy in the round-trip travel time from the defect between the simulated case and the experimental one. The two travel times are 183 µs and 212 µs, respectively, and they correspond to different group velocities, 3500 m/s and 3119 m/s. This result was expected and commented on in Section 2 and Section 4. However, the detectability of this notch defect at a long range is not influenced by this discrepancy and the validity of the 3D FEM system model is confirmed.
- In the experimental A-scan signals, the subtraction of the direct signal is very effective and this means that the electronics and transducers have good stability over time. To enhance this statement, the signal subtraction method was also implemented in real time by the digital oscilloscope and no variations were observed after 5 h.
8. Discussion of Applications in Long-Range SHM
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Signal Processing Suite

References
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons, Ltd.: Chichester, UK, 2012. [Google Scholar] [CrossRef]
- Deraemaeker, A.; Worden, K. New Trends in Vibration Based Structural Health Monitoring; Springer: New York, NY, USA, 2010; Volume 520. [Google Scholar] [CrossRef]
- Auld, B.A. Acoustic Fields and Waves in Solids; Wiley: New York, NY, USA, 1973. [Google Scholar]
- Rose, J.L. Ultrasonic Guided Waves in Solid Media; Cambridge University Press: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An Introduction to Structural Health Monitoring. In New Trends in Vibration Based Structural Health Monitoring; Deraemaeker, A., Worden, K., Eds.; CISM International Centre for Mechanical Sciences: Udine, Italy; Springer: Vienna, Austria, 2010; Volume 520, pp. 1–17. [Google Scholar] [CrossRef]
- Ren, B.; Lissenden, C. Phased Array Transducers for Ultrasonic Guided Wave Mode Control and Identification for Aircraft Structural Health Monitoring. Mater. Eval. 2015, 73, 1089–1100. [Google Scholar]
- Ono, K. Review on Structural Health Evaluation with Acoustic Emission. Appl. Sci. 2018, 8, 958. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Structural Health Monitoring with Piezoelectric Wafer Active Sensors; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Staszewski, W.J.; Mahzan, S.; Traynor, R. Health monitoring of aerospace composite structures—Active and passive approach. Compos. Sci. Technol. 2009, 69, 1678–1685. [Google Scholar] [CrossRef]
- Diligent, O. Interaction between Fundamental Lamb Modes and Defects in Plates. Ph.D. Thesis, Imperial Colege London, London, UK, 2003. [Google Scholar]
- Mckeon, J.C.P.; Hinders, M.K. Lamb wave scattering from a through hole. J. Sound Vib. 1999, 224, 843–862. [Google Scholar] [CrossRef]
- Fromme, P.; Sayir, M.B. Measurement of the scattering of a Lamb wave by a through hole in a plate. J. Acoust. Soc. Am. 2002, 111, 1165–1170. [Google Scholar] [CrossRef] [PubMed]
- Anastasi, R.F. Investigating the Use of Ultrasonic Guided Wave Analysis Methods for Detecting and Classifying a Small Notch in a Thin Metallic Plate; Defense Technical Information Center: Fort Belvoir, VA, USA, 2011. [Google Scholar] [CrossRef]
- Fromme, P.; Rouge, C. Directivity of guided ultrasonic wave scattering at notches and cracks. J. Phys. Conf. Ser. 2011, 269, 012018. [Google Scholar] [CrossRef]
- Masserey, B.; Fromme, P. Surface defect detection in stiffened plate structures using Rayleigh-like waves. NDT E Int. 2009, 42, 564–572. [Google Scholar] [CrossRef]
- European Cooperation for Space Standardization. ECSS-E-ST-32-01C Rev. 2—Fracture Control. 30 July 2021. Available online: https://ecss.nl/standard/ecss-e-st-32-01c-rev-2-fracture-control-30-july-2021/ (accessed on 4 February 2024).
- Introduction to COMSOL Multiphysics; COMSOL: Burlington, MA, USA, 2013.
- Capineri, L.; Bulletti, A.; Damiani, C.; Bergamaschi, L. A Sensing System for Defects Detection in Reinforced Aluminium Panels by Ultrasonic Guided Waves Sensors. In Advances in System-Integrated Intelligence; Valle, M., Lehmhus, D., Gianoglio, C., Ragusa, E., Seminara, L., Bosse, S., Ibrahim, A., Thoben, K.-D., Eds.; Springer International Publishing: Cham, Switzerland, 2023; Volume 546, pp. 331–339. [Google Scholar] [CrossRef]
- Edalati, K.; Kermani, A.; Seiedi, M.; Movafeghi, A. Defect detection in thin plates by ultrasonic lamb wave techniques. Int. J. Mater. Prod. Technol. 2006, 27, 156–172. [Google Scholar] [CrossRef]
- Fromme, P. Lamb wave (A0 mode) scattering directionality at defects. AIP Conf. Proc. 2017, 1806, 030002. [Google Scholar] [CrossRef]
- Center for Lightweight-Production-Technology. The Dispersion Calculator: An Open Source Software for Calculating Dispersion Curves and Mode Shapes of Guided Waves. Available online: https://www.dlr.de/zlp/en/desktopdefault.aspx/tabid-14332/24874_read-61142/ (accessed on 31 January 2024).
- Capineri, L.; Taddei, L.; Bergamaschi, L.; Bulletti, A. Monitoring the Progression of a Cylindrical Flaw in a Reinforced Aluminum Panel Using Piezopolymer Interdigitated Lamb Wave Transducers. In Proceedings of the 2023 IEEE International Ultrasonics Symposium (IUS), Montreal, QC, Canada, 3–8 September 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–3. [Google Scholar] [CrossRef]
- Piezotech® Electroactive Polymers|Arkema Piezotech. Available online: https://piezotech.arkema.com/en/ (accessed on 4 February 2024).
- Song, E.Y.; FitzPatrick, G.J.; Lee, K.B. Smart Sensors and Standard-Based Interoperability in Smart Grids. IEEE Sens. J. 2017, 17, 7723–7730. [Google Scholar] [CrossRef]
- Gorgin, R.; Luo, Y.; Wu, Z. Environmental and operational conditions effects on Lamb wave based structural health monitoring systems: A review. Ultrasonics 2020, 105, 106114. [Google Scholar] [CrossRef]
- Jia, H.; Liu, H.; Zhang, Z.; Dai, F.; Liu, Y.; Leng, J. A baseline-free approach of locating defect based on mode conversion and the reciprocity principle of Lamb waves. Ultrasonics 2020, 102, 106063. [Google Scholar] [CrossRef] [PubMed]
- Anton, S.R.; Inman, D.J.; Park, G. Reference-Free Damage Detection Using Instantaneous Baseline Measurements. AIAA J. 2009, 47, 1952–1964. Available online: https://arc.aiaa.org/doi/10.2514/1.43252 (accessed on 7 February 2024). [CrossRef]
- Reyes, O.A.M.; Zima, B.; Moll, J.; Mohammadgholiha, M.; De Marchi, L. A Numerical Study on Baseline-Free Damage Detection Using Frequency Steerable Acoustic Transducers. In European Workshop on Structural Health Monitoring; Rizzo, P., Milazzo, A., Eds.; Lecture Notes in Civil Engineering; Springer International Publishing: Cham, Switzerland, 2023; Volume 270, pp. 24–33. [Google Scholar] [CrossRef]
- Capineri, L.; Gallai, A.; Masotti, L. Design criteria and manufacturing technology of piezo-polymer transducer arrays for acoustic guided waves detection. In Proceedings of the 2002 IEEE Ultrasonics Symposium, Munich, Germany, 8–11 October 2002; IEEE: Piscataway, NJ, USA, 2002; pp. 857–860. [Google Scholar] [CrossRef]
- Capineri, L.; Giannelli, P.; Calabrese, G. Comparison of Voltage-Mode and Charge-Mode amplifiers for Interfacing piezopolymer transducers to SHM electronic systems. In Proceedings of the 2019 26th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Genoa, Italy, 27–29 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 278–281. [Google Scholar] [CrossRef]
- Capineri, L. A 15 MHz bandwidth, 60 Vpp, low distortion power amplifier for driving high power piezoelectric transducers. Rev. Sci. Instrum. 2014, 85, 104701. [Google Scholar] [CrossRef]
- Jin, J.; Quek, S.T.; Wang, Q. Design of interdigital transducers for crack detection in plates. Ultrasonics 2005, 43, 481–493. [Google Scholar] [CrossRef]
- Rguiti, M.; Grondel, S.; El youbi, F.; Courtois, C.; Lippert, M.; Leriche, A. Optimized piezoelectric sensor for a specific application: Detection of Lamb waves. Sens. Actuators A Phys. 2006, 126, 362–368. [Google Scholar] [CrossRef]
- Kannajosyula, H.; Lissenden, C.J.; Rose, J.L. Analysis of annular phased array transducers for ultrasonic guided wave mode control. Smart Mater. Struct. 2013, 22, 085019. [Google Scholar] [CrossRef]
- Ziping, W.; Xiqiang, X.; Lei, Q.; Jiatao, W.; Yue, F.; Maoyuan, T. Research on the Progress of Interdigital Transducer (IDT) for Structural Damage Monitoring. J. Sens. 2021, 2021, e6630658. [Google Scholar] [CrossRef]
- Wang, S.; Wu, W.; Shen, Y.; Li, H.; Tang, B. Lamb Wave Directional Sensing with Piezoelectric Fiber Rosette in Structure Health Monitoring. Shock Vib. 2019, 2019, e6189290. [Google Scholar] [CrossRef]
- Veit, G.; Bélanger, P. An ultrasonic guided wave excitation method at constant phase velocity using ultrasonic phased array probes. Ultrasonics 2020, 102, 106039. [Google Scholar] [CrossRef]
- Velichko, A.; Wilcox, P.D. Guided wave arrays for high resolution inspection. J. Acoust. Soc. Am. 2008, 123, 186–196. [Google Scholar] [CrossRef]
- Yu, L.; Tian, Z. Guided wave phased array beamforming and imaging in composite plates. Ultrasonics 2016, 68, 43–53. [Google Scholar] [CrossRef]
- Marchi, L.D.; Testoni, N.; Marzani, A. Spiral-shaped piezoelectric sensors for Lamb waves direction of arrival (DoA) estimation. Smart Mater. Struct. 2018, 27, 045016. [Google Scholar] [CrossRef]
- Cantero-Chinchilla, S.; Aranguren, G.; Royo, J.M.; Chiachío, M.; Etxaniz, J.; Calvo-Echenique, A. Structural Health Monitoring Using Ultrasonic Guided-Waves and the Degree of Health Index. Sensors 2021, 21, 993. [Google Scholar] [CrossRef]
- Nerlikar, V.; Mesnil, O.; Miorelli, R.; D’Almeida, O. Damage detection with ultrasonic guided waves using machine learning and aggregated baselines. Struct. Health Monit. 2024, 23, 443–462. Available online: https://journals.sagepub.com/doi/abs/10.1177/14759217231169719 (accessed on 7 February 2024). [CrossRef]
- Teng, F.; Wei, J.; Lv, S.; Peng, C.; Zhang, L.; Ju, Z.; Jia, L.; Jiang, M. Ultrasonic Guided Wave Damage Localization in Hole-Structural Bearing Crossbeam Based on Improved RAPID Algorithm. IEEE Trans. Instrum. Meas. 2022, 71, 3524513. [Google Scholar] [CrossRef]
- Würschig, T. Acoustic Response of Reference Notches: Derivation of Acceptance Criteria for Automated Ultrasonic Testing Based on the Correlation between Defect Quality and Effective Defect Size. J. Nondestruct. Eval. 2022, 41, 16. [Google Scholar] [CrossRef]
- Wirdelius, H.; Österberg, E. Study of Defect Characteristics Essential for NDT Testing Methods ET, UT and RT; U.S. Department of Energy: Washington, DC, USA, 2000.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | UoM | Value |
|---|---|---|
| d31 | [pC/N] | 6 ± 10% |
| d33 | [pC/N] | −25 ± 10% |
| g33 at 1 kHz | [V-m/N] | 0.2 ± 20% |
| kt | --- | 15% |
| εr at 1 kHz | --- | 10 to 11 ± 10% |
| ρ | [kg/dm3] | 1.8 |
| Curie Temperature | [°C] | 136 ± 5% |
| Sound speed longitudinal | [m/s] | 2400 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Capineri, L.; Taddei, L.; Marino Merlo, E. Detection of a Submillimeter Notch-Type Defect at Multiple Orientations by a Lamb Wave A0 Mode at 550 kHz for Long-Range Structural Health Monitoring Applications. Sensors 2024, 24, 1926. https://doi.org/10.3390/s24061926
Capineri L, Taddei L, Marino Merlo E. Detection of a Submillimeter Notch-Type Defect at Multiple Orientations by a Lamb Wave A0 Mode at 550 kHz for Long-Range Structural Health Monitoring Applications. Sensors. 2024; 24(6):1926. https://doi.org/10.3390/s24061926
Chicago/Turabian StyleCapineri, Lorenzo, Lorenzo Taddei, and Eugenio Marino Merlo. 2024. "Detection of a Submillimeter Notch-Type Defect at Multiple Orientations by a Lamb Wave A0 Mode at 550 kHz for Long-Range Structural Health Monitoring Applications" Sensors 24, no. 6: 1926. https://doi.org/10.3390/s24061926
APA StyleCapineri, L., Taddei, L., & Marino Merlo, E. (2024). Detection of a Submillimeter Notch-Type Defect at Multiple Orientations by a Lamb Wave A0 Mode at 550 kHz for Long-Range Structural Health Monitoring Applications. Sensors, 24(6), 1926. https://doi.org/10.3390/s24061926