
Flexible 3D Force Sensor Based on Polymer Nanocomposite for Soft Robotics and Medical Applications


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Sensor Design and Fabrication
2.1. Sensing Elements Fabrication
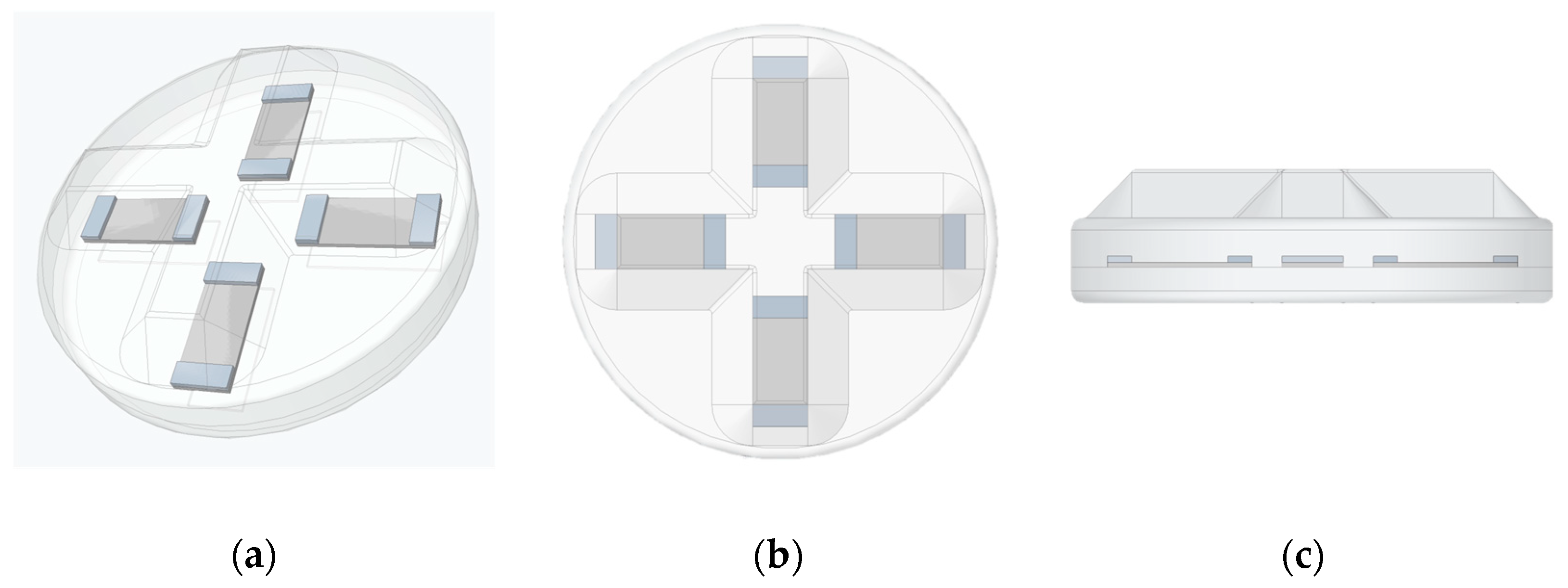
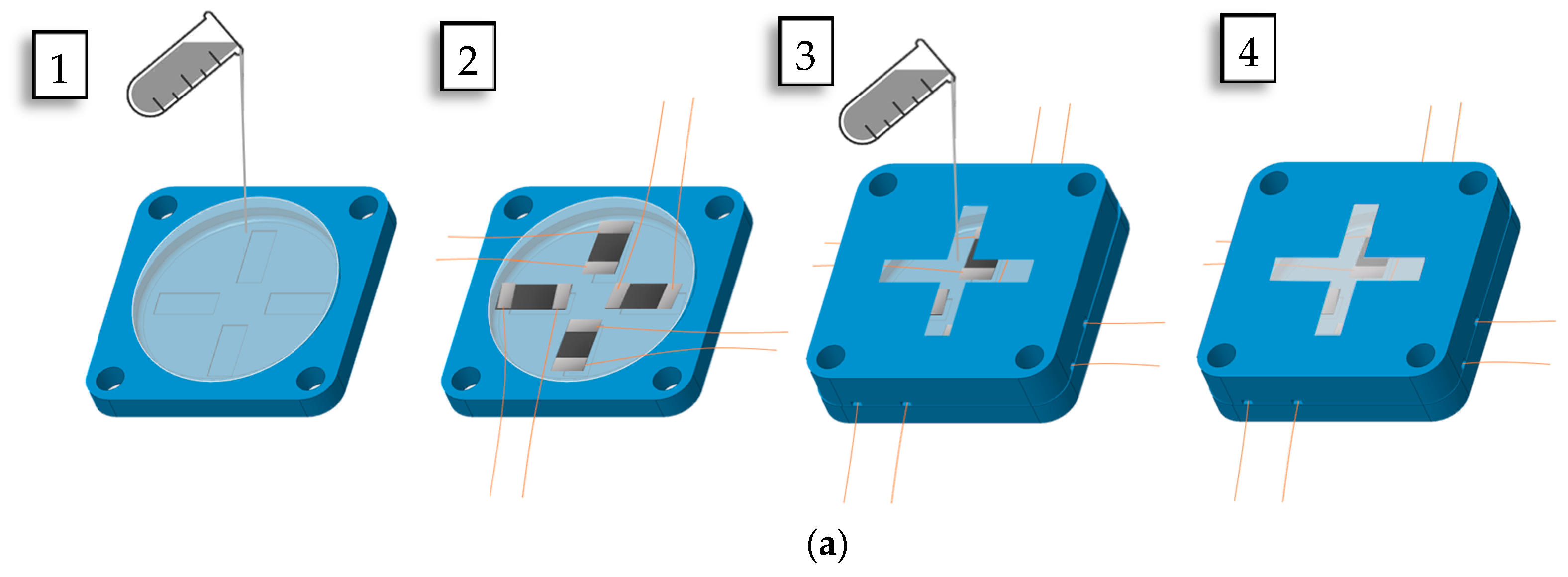
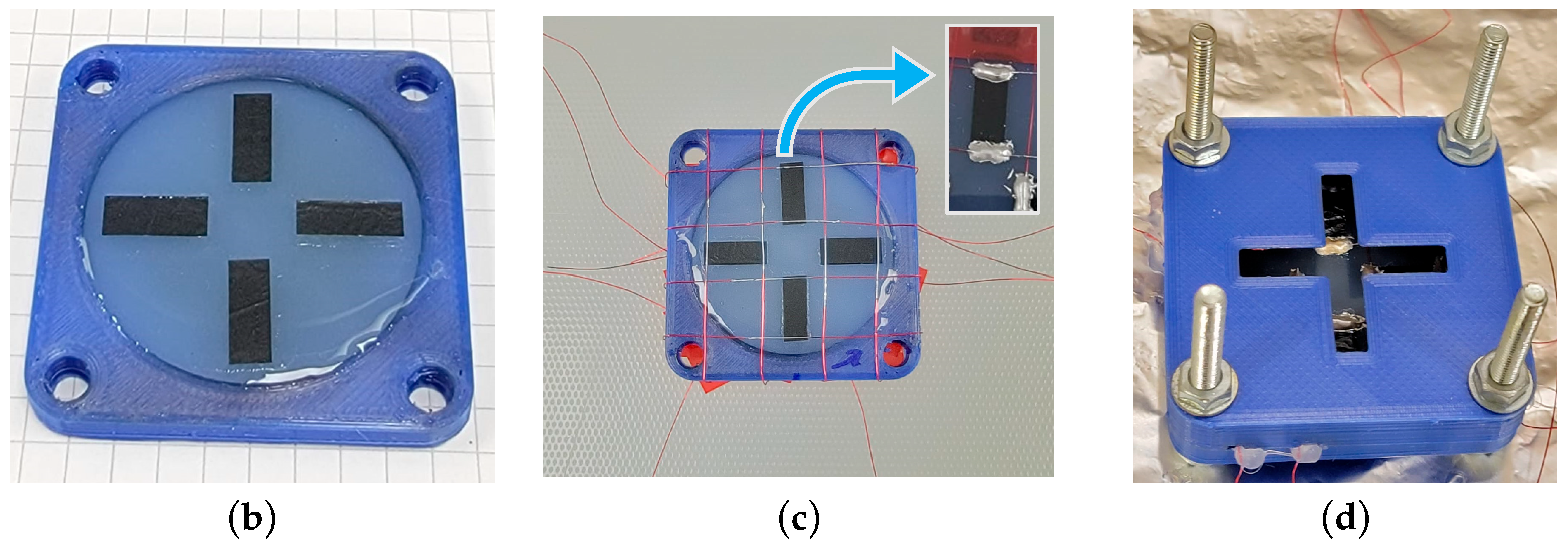
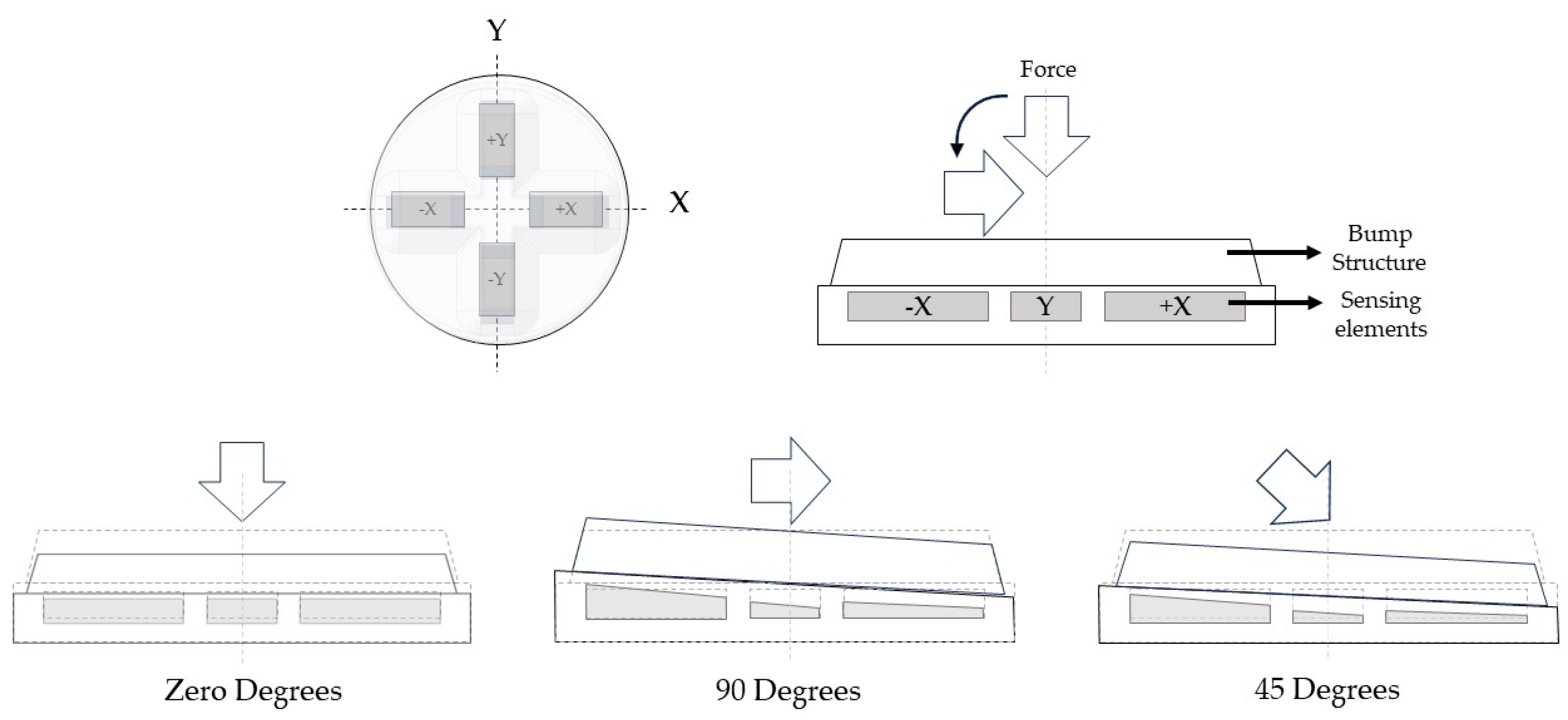
2.2. Flexible 3D Force Sensor Fabrication and Operation Principle
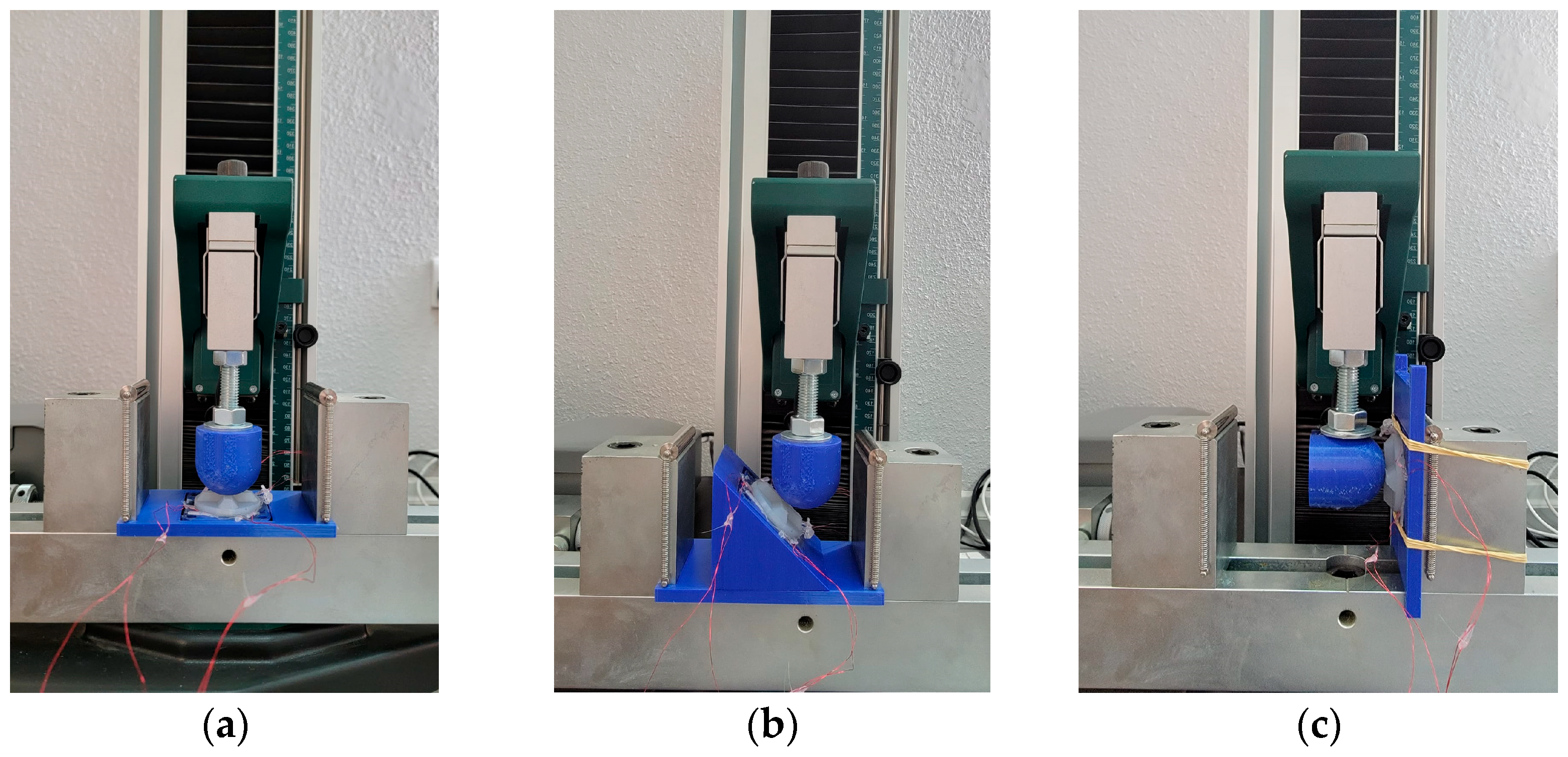
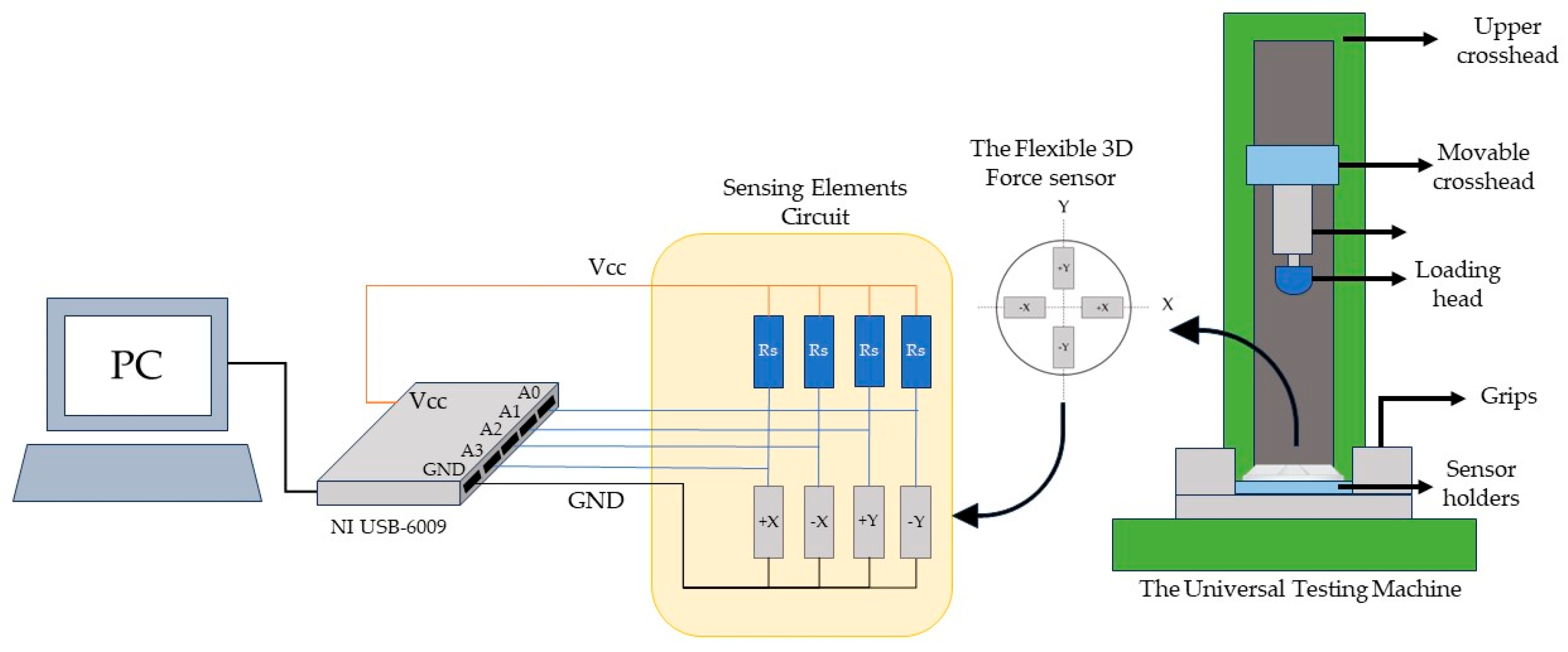
3. Experimental Setup
4. Results and Discussion
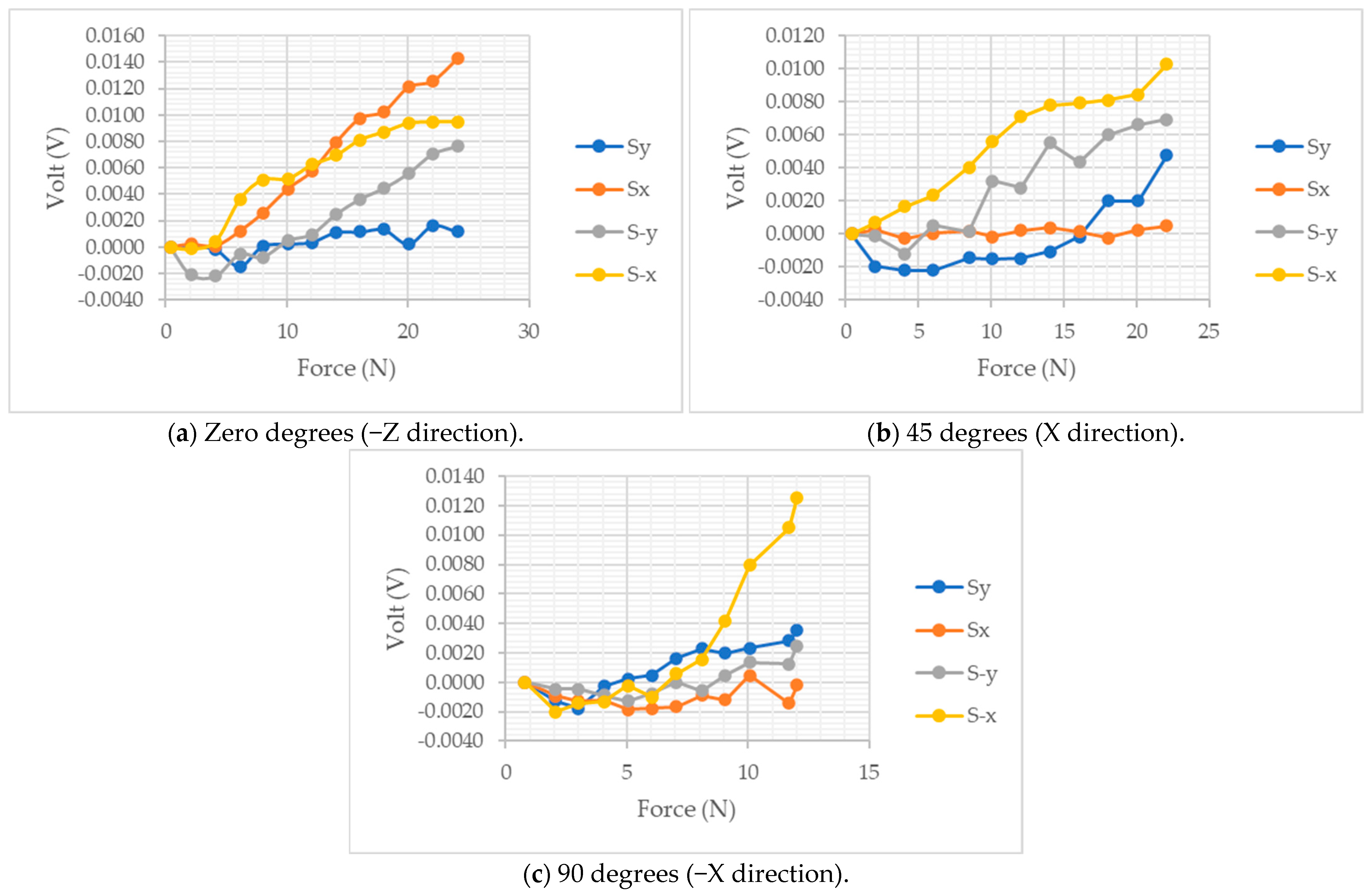
4.1. Static Loading Results
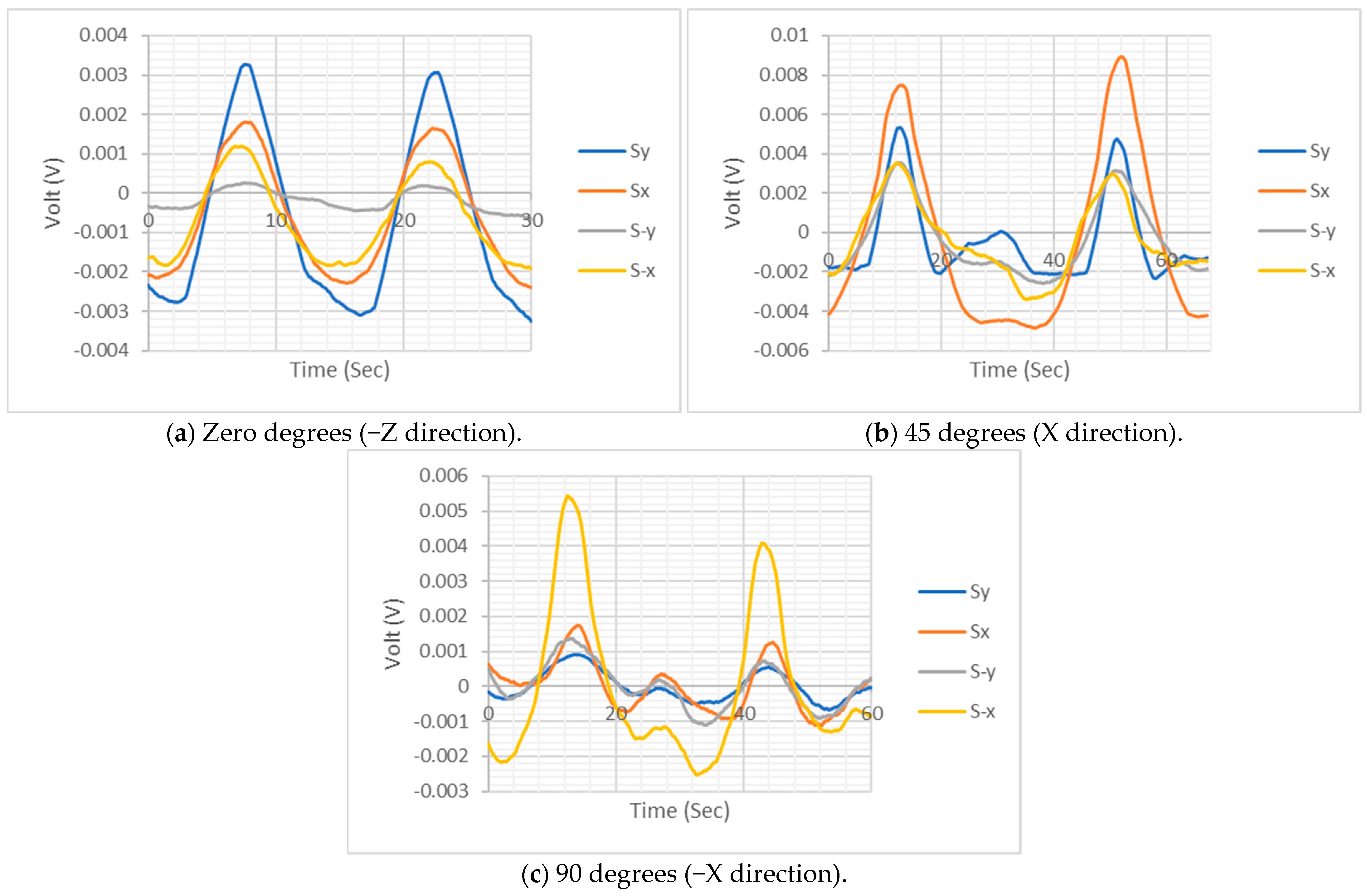
4.2. Dynamic Loading Results
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Komurlu, E.; Cihangir, F.; Kesimal, A.; Demir, S. Effect of adhesive type on the measurement of modulus of elasticity using electrical resistance strain gauges. Arab. J. Sci. Eng. 2015, 41, 433–441. [Google Scholar] [CrossRef]
- Kim, S.-R.; Kim, J.-H.; Park, J.-W. Wearable and transparent capacitive strain sensor with high sensitivity based on patterned AG Nanowire Networks. ACS Appl. Mater. Interfaces 2017, 9, 26407–26416. [Google Scholar] [CrossRef] [PubMed]
- Campanella, C.; Cuccovillo, A.; Campanella, C.; Yurt, A.; Passaro, V. Fibre Bragg grating based strain sensors: Review of Technology and Applications. Sensors 2018, 18, 3115. [Google Scholar] [CrossRef] [PubMed]
- Sirohi, J.; Chopra, I. Fundamental understanding of piezoelectric strain sensors. J. Intell. Mater. Syst. Struct. 2000, 11, 246–257. [Google Scholar] [CrossRef]
- Amjadi, M.; Kyung, K.; Park, I.; Sitti, M. Stretchable, skin-mountable, and wearable strain sensors and their potential applications: A Review. Adv. Funct. Mater. 2016, 26, 1678–1698. [Google Scholar] [CrossRef]
- Kang, I.; Schulz, M.J.; Kim, J.H.; Shanov, V.; Shi, D. A carbon nanotube strain sensor for Structural Health Monitoring. Smart Mater. Struct. 2006, 15, 737–748. [Google Scholar] [CrossRef]
- Deng, Z.; Jonetzko, Y.; Zhang, L.; Zhang, J. Grasping force control of multi-fingered robotic hands through tactile sensing for object stabilization. Sensors 2020, 20, 1050. [Google Scholar] [CrossRef]
- Cheng, M.; Zhu, G.; Zhang, F.; Tang, W.-L.; Jianping, S.; Yang, J.-Q.; Zhu, L.-Y. A review of Flexible Force sensors for human health monitoring. J. Adv. Res. 2020, 26, 53–68. [Google Scholar] [CrossRef]
- Viry, L.; Levi, A.; Totaro, M.; Mondini, A.; Mattoli, V.; Mazzolai, B.; Beccai, L. Flexible three-axial force sensor for soft and highly sensitive artificial touch. Adv. Mater. 2014, 26, 2659–2664. [Google Scholar] [CrossRef]
- Dow. 2022. Available online: https://www.dow.com (accessed on 30 March 2022).
- Actuatorweb. 2022. Available online: https://www.actuatorweb.org (accessed on 30 March 2022).
- Lee, H.-K.; Chung, J.; Chang, S.-I.; Yoon, E. Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. J. Microelectromech. Syst. 2008, 17, 934–942. [Google Scholar] [CrossRef]
- Lee, H.-K.; Chung, J.; Chang, S.-I.; Yoon, E. Real-time measurement of the three-axis contact force distribution using a flexible capacitive polymer tactile sensor. J. Micromech. Microeng. 2011, 21, 035010. [Google Scholar] [CrossRef]
- Lee, H.-K.; Chung, J.; Chang, S.-I.; Yoon, E. Polymer tactile sensing array with a unit cell of multiple capacitors for three-axis contact force image construction. In Proceedings of the 2007 IEEE 20th International Conference on Micro Electro Mechanical Systems (MEMS), Hyogo, Japan, 21–25 January 2007. [Google Scholar] [CrossRef]
- Cheng, M.-Y.; Lin, C.-L.; Lai, Y.-T.; Yang, Y.-J. A polymer-based capacitive sensing array for normal and shear force measurement. Sensors 2010, 10, 10211–10225. [Google Scholar] [CrossRef] [PubMed]
- Cheng, M.-Y.; Huang, X.-H.; Ma, C.-W.; Yang, Y.-J. A flexible capacitive tactile sensing array with floating electrodes. J. Micromech. Microeng. 2009, 19, 115001. [Google Scholar] [CrossRef]
- Liang, G.; Wang, Y.; Mei, D.; Xi, K.; Chen, Z. Flexible capacitive tactile sensor array with truncated pyramids as dielectric layer for three-axis force measurement. J. Microelectromech. Syst. 2015, 24, 1510–1519. [Google Scholar] [CrossRef]
- Liang, G.; Wang, Y.; Mei, D.; Xi, K.; Chen, Z. Preliminary experimental study on the sensing performance of a capacitive tactile sensor array mounted on curved surfaces. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Republic of Korea, 7–11 July 2015. [Google Scholar] [CrossRef]
- Wang, S.; Wang, C.; Lin, Q.; Zhang, Y.; Zhang, Y.; Liu, Z.; Luo, Y.; Xu, X.; Han, F.; Jiang, Z. Flexible three-dimensional force sensor of high sensing stability with bonding and supporting composite structure for smart devices. Smart Mater. Struct. 2021, 30, 105004. [Google Scholar] [CrossRef]
- Zhu, Y.; Jiang, S.; Xiao, Y.; Yu, J.; Sun, L.; Zhang, W. A flexible three-dimensional force sensor based on PI piezoresistive film. J. Mater. Sci. Mater. Electron. 2018, 29, 19830–19839. [Google Scholar] [CrossRef]
- Pyo, S.; Lee, J.; Kim, M.; Lee, H.; Kim, J. Polymer-based flexible and multi-directional tactile sensor with multiple NiCr piezoresistors. Micro Nano Syst. Lett. 2019, 7, 5. [Google Scholar] [CrossRef]
- Hwang, E.-S.; Seo, J.; Kim, Y.-J. A polymer-based flexible tactile sensor for both normal and shear load detections and its application for Robotics. J. Microelectromech. Syst. 2007, 16, 556–563. [Google Scholar] [CrossRef]
- Spinner, S.; Bartholomeyczik, J.; Becker, B.; Doelle, M.; Paul, O.; Polian, I.; Roth, R.; Seitz, K.; Ruther, P. Electromechanical Reliability Testing of Three-Axial Silicon Force Sensors. Available online: https://arxiv.org/abs/0711.3289 (accessed on 30 March 2022).
- Yu, P.; Liu, W.; Gu, C.; Cheng, X.; Fu, X. Flexible piezoelectric tactile sensor array for dynamic three-axis force measurement. Sensors 2016, 16, 819. [Google Scholar] [CrossRef]
- Stekelenburg, A.; Gawlitta, D.; Bader, D.; Oomens, C. Deep Tissue Injury: How Deep is Our Understanding? Arch. Phys. Med. Rehabil. 2008, 89, 1410–1413. [Google Scholar] [CrossRef]
- Boone, D.A.; Kobayashi, T.; Chou, T.G.; Arabian, A.K.; Coleman, K.L.; Orendurff, M.S.; Zhang, M. Influence of malalignment on socket reaction moments during gait in amputees with Transtibial Prostheses. Gait Posture 2013, 37, 620–626. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, T.; Orendurff, M.; Arabian, A.; Rosenbaum-Chou, T.; Boone, D. Effect of prosthetic alignment changes on socket reaction moment impulse during walking in transtibial amputees. J. Biomech. 2014, 47, 1315–1323. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, T.; Orendurff, M.; Zhang, M.; Boone, D. Effect of transtibial prosthesis alignment changes on out-of-plane socket reaction moments during walking in amputees. J. Biomech. 2012, 45, 2603–2609. [Google Scholar] [CrossRef] [PubMed]
- Kobayashi, T.; Orendurff, M.; Zhang, M.; Boone, D. Effect of alignment changes on sagittal and coronal socket reaction moment interactions in transtibial prostheses. J. Biomech. 2013, 46, 1343–1350. [Google Scholar] [CrossRef] [PubMed]
- Buis, A.; Convery, P. Calibration problems encountered while monitoring stump/socket interface pressures with force sensing resistors. Prosthet. Orthot. Int. 1997, 21, 179–182. [Google Scholar] [CrossRef] [PubMed]
- Pirouzi, G.; Abu Osman, N.; Eshraghi, A.; Ali, S.; Gholizadeh, H.; Wan Abas, W. Review of the Socket Design and Interface Pressure Measurement for Transtibial Prosthesis. Sci. World J. 2014, 2014, 849073. [Google Scholar] [CrossRef] [PubMed]
- Alotaibi, A.; Anwar, S. Direct and Extended Piezoresistive and Piezoelectric Strain Fusion for a Wide Band PVDF/MWCNT-Based 3D Force Sensor. IEEE Access 2021, 9, 162156–162174. [Google Scholar] [CrossRef]
- Bryning, M.B.; Islam, M.F.; Kikkawa, J.M.; Yodh, A.G. Very low conductivity threshold in bulk isotropic single-walled carbon nanotube-epoxy composites. Adv. Mater. 2005, 17, 1186–1191. [Google Scholar] [CrossRef]
- Pham, G.T. Characterization and Modeling of Piezoresistive Properties of Carbon Nanotube-Based Conductive Polymer Composites. Ph.D. Thesis, The Florida State University, Tallahassee, FL, USA, 2008. [Google Scholar]
- Alamusi; Hu, N.; Fukunaga, H.; Atobe, S.; Liu, Y.; Li, J. Piezoresistive strain sensors made from carbon nanotubes based polymer nanocomposites. Sensors 2011, 11, 10691–10723. [Google Scholar] [CrossRef]
- Hu, B.; Hu, N.; Li, Y.; Akagi, K.; Yuan, W.; Watanabe, T.; Cai, Y. Multi-scale numerical simulations on piezoresistivity of CNT/polymer nanocomposites. Nanoscale Res. Lett. 2012, 7, 402. [Google Scholar] [CrossRef]
- Li, C.; Thostenson, E.T.; Chou, T.-W. Dominant role of tunneling resistance in the electrical conductivity of carbon nanotube–based composites. Appl. Phys. Lett. 2007, 91, 223114. [Google Scholar] [CrossRef]
- Saxena, P.; Shukla, P. A comprehensive review on fundamental properties and applications of poly(vinylidene fluoride) (PVDF). Adv. Compos. Hybrid Mater. 2021, 4, 8–26. [Google Scholar] [CrossRef]
- Ferreira, A.; Lanceros-Mendez, S. Piezoresistive response of spray-printed carbon nanotube/poly(vinylidene fluoride) composites. Compos. Part B Eng. 2016, 96, 242–247. [Google Scholar] [CrossRef]
- Ferrreira, A.; Rocha, J.; Ansón-Casaos, A.; Martínez, M.; Vaz, F.; Lanceros-Mendez, S. Electromechanical performance of poly(vinylidene fluoride)/carbon nanotube composites for Strain Sensor Applications. Sens. Actuators A Phys. 2012, 178, 10–16. [Google Scholar] [CrossRef]
- Window, A.L. Strain Gauge Technology; Elsevier Applied Science: London, UK, 1992. [Google Scholar]
- Kanoun, O.; Müller, C.; Benchirouf, A.; Sanli, A.; Dinh, T.N.; Al-Hamry, A.; Bu, L.; Gerlach, C.; Bouhamed, A. Flexible carbon nanotube films for high performance strain sensors. Sensors 2014, 14, 10042–10071. [Google Scholar] [CrossRef] [PubMed]
- Sanati, M.; Sandwell, A.; Mostaghimi, H.; Park, S. Development of nano-composite-based strain sensor with piezoelectric and piezoresistive properties. Sensors 2018, 18, 3789. [Google Scholar] [CrossRef] [PubMed]
- Templeman, J.O.; Sheil, B.B.; Sun, T. Multi-axis force sensors: A state-of-the-art review. Sens. Actuators A Phys. 2020, 304, 111772. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alotaibi, A. Flexible 3D Force Sensor Based on Polymer Nanocomposite for Soft Robotics and Medical Applications. Sensors 2024, 24, 1859. https://doi.org/10.3390/s24061859
Alotaibi A. Flexible 3D Force Sensor Based on Polymer Nanocomposite for Soft Robotics and Medical Applications. Sensors. 2024; 24(6):1859. https://doi.org/10.3390/s24061859
Chicago/Turabian StyleAlotaibi, Ahmed. 2024. "Flexible 3D Force Sensor Based on Polymer Nanocomposite for Soft Robotics and Medical Applications" Sensors 24, no. 6: 1859. https://doi.org/10.3390/s24061859
APA StyleAlotaibi, A. (2024). Flexible 3D Force Sensor Based on Polymer Nanocomposite for Soft Robotics and Medical Applications. Sensors, 24(6), 1859. https://doi.org/10.3390/s24061859