Abstract
Latent Low-Rank Representation (LatLRR) has emerged as a prominent approach for fusing visible and infrared images. In this approach, images are decomposed into three fundamental components: the base part, salient part, and sparse part. The aim is to blend the base and salient features to reconstruct images accurately. However, existing methods often focus more on combining the base and salient parts, neglecting the importance of the sparse component, whereas we advocate for the comprehensive inclusion of all three parts generated from LatLRR image decomposition into the image fusion process, a novel proposition introduced in this study. Moreover, the effective integration of Convolutional Neural Network (CNN) technology with LatLRR remains challenging, particularly after the inclusion of sparse parts. This study utilizes fusion strategies involving weighted average, summation, VGG19, and ResNet50 in various combinations to analyze the fusion performance following the introduction of sparse parts. The research findings show a significant enhancement in fusion performance achieved through the inclusion of sparse parts in the fusion process. The suggested fusion strategy involves employing deep learning techniques for fusing both base parts and sparse parts while utilizing a summation strategy for the fusion of salient parts. The findings improve the performance of LatLRR-based methods and offer valuable insights for enhancement, leading to advancements in the field of image fusion.
1. Introduction
Image fusion, particularly the integration of visible and infrared images, has become an interesting and demanding research area in recent years. Visible images offer rich color and texture information, while infrared images succeed in capturing thermal radiation data in low-light conditions. The fusion of these image modalities yields valuable insights for a wide range of applications, such as intelligent urban surveillance [1], environmental monitoring [2], autonomous vehicles [3], medical diagnostics [4,5], military surveillance [6], and precision weapon targeting. Researchers in this domain have diligently advanced various methods, classifiable into three main categories based on their processing techniques: multi-scale transformation, sparse representation, and deep learning [7,8,9].
Multi-scale transformation is a method that primarily involves the decomposition of the original image into multiple scales, resulting in sub-images at different spatial scales. Common methods for this decomposition include wavelet transforms [10], pyramid transforms [11], contourlet transforms (CT) [12], non-subsampled contourlet transforms (NSCT) [13], fourth-order partial differential equations (FPDEs) [14], anisotropic diffusion [15], and shift-invariant shearlet transforms [16]. Following this decomposition, pixel-level or region-level fusion strategies are applied, which include techniques such as weight allocation and combination methods like maximum, average, and weighted average. Subsequently, the final fused image is reconstructed from the fused sub-images using an inverse multi-scale transformation. This approach is widely used in various applications and research contexts.
The fundamental concept of sparse representation (SR) [17,18,19,20,21] posits that image signals can be represented as a linear combination of a select few atoms drawn from a pre-learned dictionary, with the sparse coefficients capturing the salient characteristics of the source images.
These two categories correspond to conventional approaches for fusing visible and infrared images. In recent years, there has been widespread adoption of deep learning in this field. Typically, these approaches can be further subdivided into four categories depending on the specific methodologies applied:
- Convolutional Neural Network (CNN)-based methods can be categorized into two primary methods. First, CNNs are trained on visible, infrared, and fused images to acquire the requisite weightings for fusion [22,23,24,25,26,27,28,29]. Second, it leverages pre-trained neural network models to only extract features and obtain weight maps from the images, thereby achieving the fusion objective [30,31,32,33];
- Generative Adversarial Network (GAN)-based methods transform the task of integrating visible and infrared images into an adversarial process, characterized by the interplay between a generator and a discriminator. Their objective is to combine visible and infrared images through the generator, at the same time tasking the discriminator with evaluating the sufficiency of visible and infrared information within the fused image [34,35,36,37,38,39,40];
- Encoder-decoder-based networks consist of two main components: an encoder and a decoder. The encoder extracts high-dimensional feature representations from the source images. The decoder’s job is to reconstruct the encoded features, gradually restoring the image’s details and structure, ultimately producing the fused image. Traditional autoencoders typically employ fully connected layers. Convolutional layers and pooling layers have also been utilized, thus improving feature extraction capabilities and robustness [41,42,43,44,45,46];
- Transformer-based methods: the Transformer was originally introduced for natural language processing and has demonstrated significant achievements in this domain [47]. Due to its remarkable long-range modeling capabilities, the Transformer has attracted the attention of researchers in the field of image fusion [48,49,50,51,52,53]. Transformer converters incorporate Multilayer Perceptron (MLP) and Multihead Self-Attention (MSA) blocks. Residual structures and Layer Normalization (LN) are applied before each MSA and MLP layer. The core design of these converters involves the fusion of input vectors with positional embeddings to preserve positional information for each vector.
Latent Low-Rank Representation (LatLRR) has emerged as a recently employed method for image fusion [54,55,56,57,58]. LatLRR decomposes images into three components: base, salient, and sparse parts [59]. A fusion strategy is then applied to merge the extracted features from the base and salient parts. Typically, it is common to use the average of base parts and the summation of salient parts. Lately, the integration of LatLRR with CNN-based methods has been proposed. This integration is aimed at further enhancing the quality and effectiveness of the fusion process, ultimately resulting in improved fused images. Nevertheless, it is noteworthy that existing LatLRR-based methods suffer from certain limitations as indicated in the literature. Firstly, the current approaches mainly concentrate on the base and salient parts, forgetting about the sparse parts. Furthermore, the proficient development of fusion strategies, particularly in the integration of CNN technology, continues to be a crucial element influencing the overall performance of fusion processes.
Taking these issues into account, this study incorporates all three components obtained from LatLRR image decomposition, namely the base, salient, and sparse parts, into the image fusion process. VGG19 and ResNet50 are separately employed as methods to obtain weight maps. The investigation seeks to evaluate the impact of including the sparse parts on fusion performance and identify the most appropriate fusion strategy, effectively leveraging the advantages of hybrid methods.
2. Related Work
LatLRR is an image decomposition method initially introduced by Liu et al. [59] in 2011, serving as an enhancement over the Low-Rank Representation (LRR) proposed in 2010 [60]. This development aimed to address LRR’s constraint in extracting local structures from raw data. In 2018, Li et al. [54] utilized LatLRR for the fusion of visible and infrared images. Their methodology involved utilizing a weighted average to combine the base parts, while employing the summation strategy to combine the salient parts, resulting in the creation of the final fused image. Following this, in 2020, Li et al. [56] introduced a multi-level decomposition approach named MDLatLRR for image decomposition. Additionally, they crafted a fusion framework based on MDLatLRR for the fusion of visible and infrared images. The MDLatLRR method facilitates the extraction of multi-level salient features. It leverages the weighted average to obtain the fused base parts and utilizes the nuclear norm to compute the weights for the fusion of salient parts.
After the application of LatLRR in the fusion of visible and infrared images, several studies have proposed fusion methods that combine LatLRR with other feature extraction techniques. The primary concept is to use LatLRR for image decomposition and then employ various techniques to fuse the base parts or the salient parts. In 2021, Huang and colleagues [58] introduced a method that combines LatLRR with Independent Component Analysis (ICA). This method uses ICA to fuse the base parts, while the salient parts are fused using a summation strategy. In 2022, Prema and others [57] proposed a fusion method that combines LatLRR with ResNet. They used ResNet50 to fuse the salient parts, and the base parts were fused using a weighted average strategy. Tao et al. [61] proposed LatLRR-VGG19 which uses VGG19 to fuse the base parts, while the salient parts are fused using a summation strategy. In 2023, Yang and his team [55] presented LatLRR-CNN, where both the base parts and the salient parts were initially fused using CNN, and the final fused image was obtained by summing the two. These studies aim to enhance image fusion performance by leveraging LatLRR and various other feature extraction techniques.
LatLRR has been verified as a robust and efficacious approach for image decomposition, especially in the context of fusing visible and infrared images. The key point of fusion strategies using LatLRR lies in the judicious application of a good weight map extraction methodology and developing a suitable mechanism for the optimal integration of each separated component. It is noteworthy that the extant literature on visible and infrared image fusion methodologies based on LatLRR has tended to overlook sparse parts. This oversight may result in the loss of specific features inherent in the original images during the fusion process. Additionally, the determination of the application of CNN-based weight map extraction methods for specific parts represents a pivotal factor influencing fusion performance. These considerations serve as the primary focus of inquiry in this study.
3. Methodology
This study focuses on suggesting a new way to combine images using the LatLRR method. We also want to look at the sparse parts of the images usually seen as noise and removed. We think the sparse parts might have important information. Our main idea is to show that this part should not be ignored. The main goal is to prove this with real evidence. To achieve this, we use the LatLRR fusion method as our base. We choose methods that have performed well in traditional approaches without incorporating sparse parts. We pay close attention to how we design our fusion strategies and carefully analyze the results. By building on what others have done before, we can test and show the differences between our method, which includes the sparse parts, and other methods that do not.
Through this careful analysis, we hope to provide strong evidence that the LatLRR-based image fusion method really does improve how well it works. At the same time, we aim to share useful insights that can help make progress in the field of image fusion.
3.1. LatLRR for Image Decomposition
In this study, LatLRR is employed to decompose visible and infrared images into base parts, salient parts, and sparse parts. In reference [59], LatLRR, by solving a nuclear norm minimization problem, can approximate the recovery of hidden data influences. The optimization problem can be expressed as Equation (1):
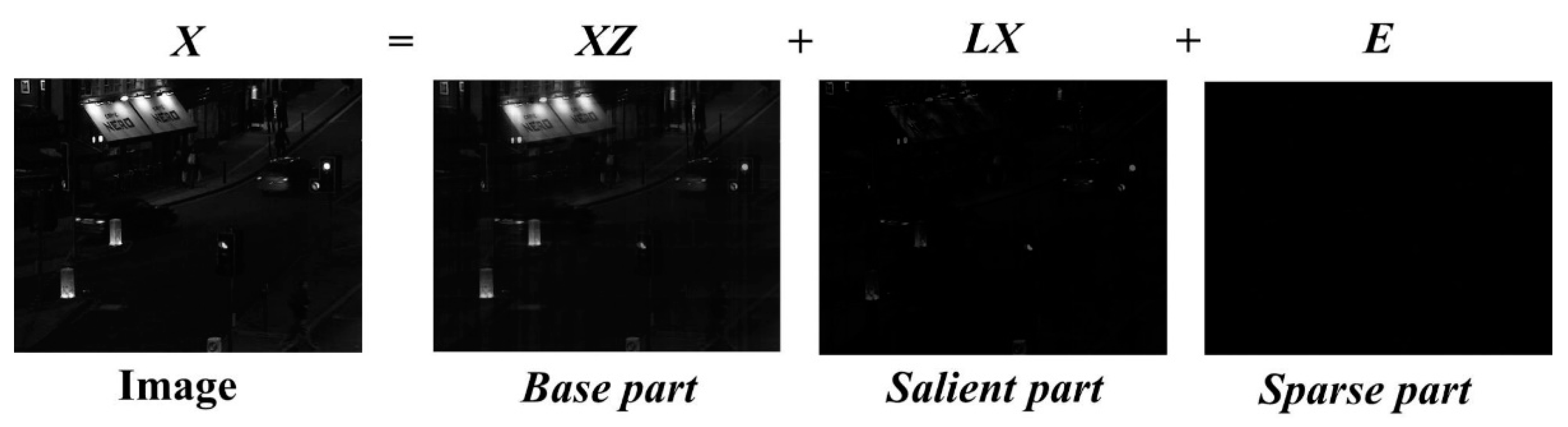
where λ is the balance coefficient and is greater than 0, denotes the nuclear norm, which is the sum of the singular values of the matrix, and represents the l1-norm. X represents the observed data matrix, Z is the low-rank coefficient, L is the salient coefficient, and E is the sparse spart. Equation (1) could be solved using the inexact Augmented Lagrangian Multiplier (ALM) [59] algorithm. Then, the base part XZ, salient part LX, and sparse part E are derived from Equation (1), as illustrated in Figure 1.
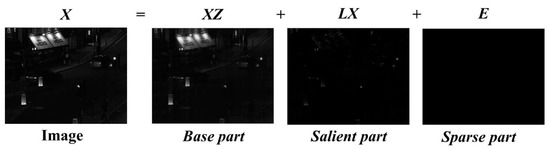
Figure 1.
The three parts of a decomposed image using LatLRR.
In the context of LatLRR’s image decomposition algorithm, the sparse part is classified as sparse noise. However, theoretically, this part derived from the original image might encapsulate significant image information. Disregarding it in the image fusion process could potentially lead to the forfeiture of valuable image information, consequently inducing distortion in the fused image. Thus, within this study, particular emphasis is placed on integrating the sparse parts meticulously into the image fusion phase to mitigate such potential loss of critical image information.
3.2. CNN-Based Pre-Trained Model for Weighted Maps Extraction
As CNNs’ capability in feature extraction has gained widespread acknowledgment, this study adopts a CNN-based pre-trained model to obtain the weighted maps necessary for the image fusion process. The advantage of using this method lies in obviating the need for retraining deep learning models or designing loss functions. This approach facilitates the ease of implementation for the fusion strategy designed in this study, thereby offering convenience for subsequent applications of interest to stakeholders.
Li et al. [31] employed the VGG19 model for extracting multi-layer features of the detailed image parts. Following this, they utilized the l1 norm and a weighted average strategy to generate multiple candidate options for the fused detailed part. Ultimately, employing a maximum selection strategy, they derived the definitive fused detailed content. This content was then integrated with the fused base parts to reconstruct the final fused image. Continuing the study by Li et al. [6], the reutilization of ResNet50 for extracting deep features from the source images is proposed. Subsequently, normalization of the deep features is conducted utilizing Zero-Phase Component Analysis (ZCA) and the l1 norm to derive initial weight maps. The final weight maps are acquired through a soft-max operation, jointly applied to the initial weight maps. Ultimately, a fused image is reconstructed employing a weighted average strategy. Inspired by the literature, this study will utilize VGG19 and ResNet50 as neural network models for feature extraction.
3.3. The Fusion Strategy
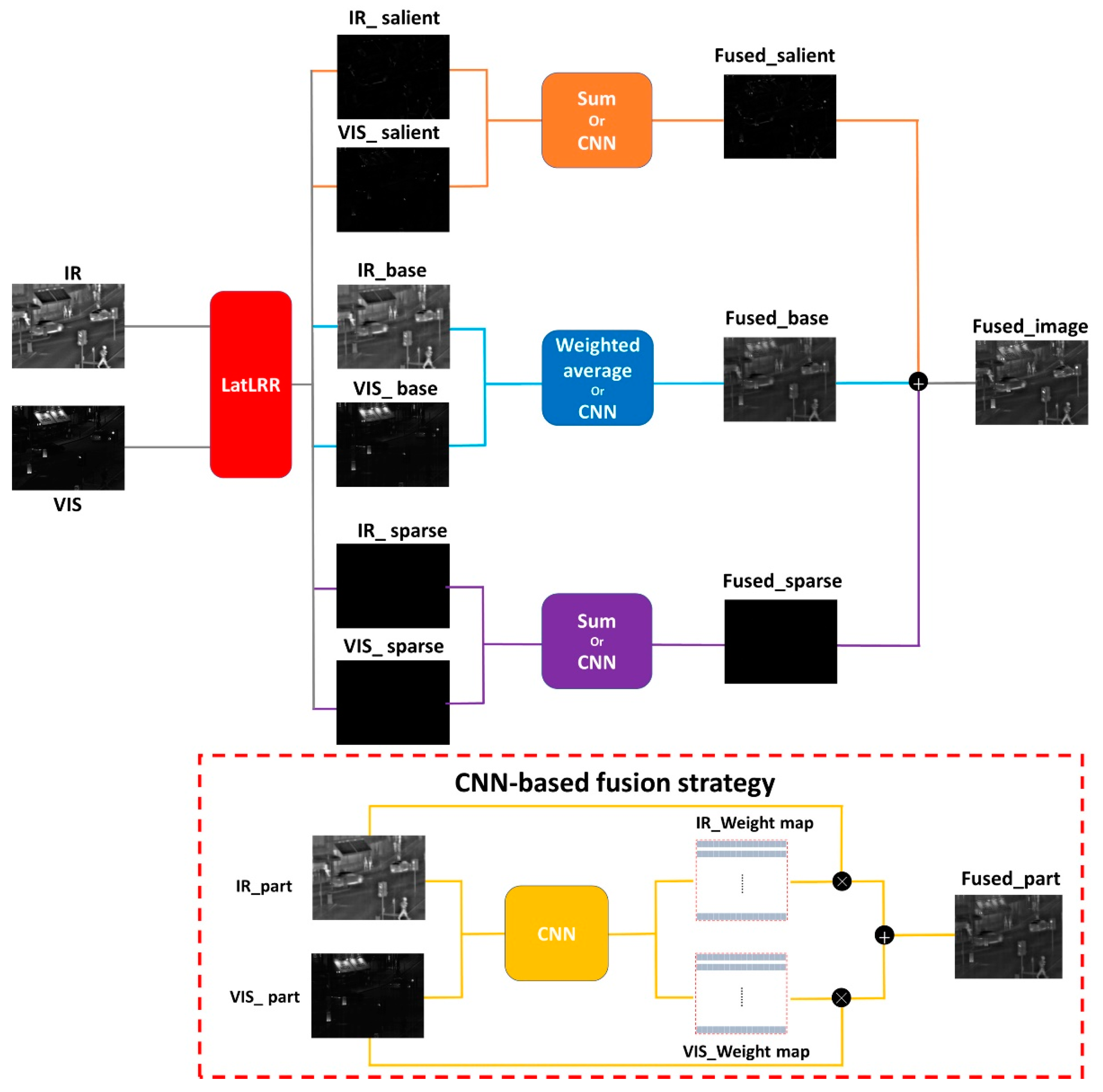
The image fusion techniques devised in this study institute comprise four methods: weighted average, summation, and the utilization of VGG19_l1 norm [31] and ResNet50_ZCA_l1 norm [30] to derive weight maps. The weighted average method is specifically applied to the base parts, while the summation method is employed for the salient and sparse parts. Additionally, VGG19_l1 norm and ResNet50_ZCA_l1 norm are utilized for all three parts. It is important to note that VGG19 and ResNet50 are used independently and not concurrently within the same strategy. The proposed framework is described in Figure 2. The fusion methodologies for weighted average and summation are mathematically expressed in Equations (2) and (3):
where represents the fused portion obtained through the weighted average method, signifies the fused part derived using the summation strategy, denotes the decomposed component extracted from the infrared image, while represents the decomposed segment from the visible image. corresponds to the weight attributed to , and pertains to the weight assigned to . In this study, both weights were set to 0.5.
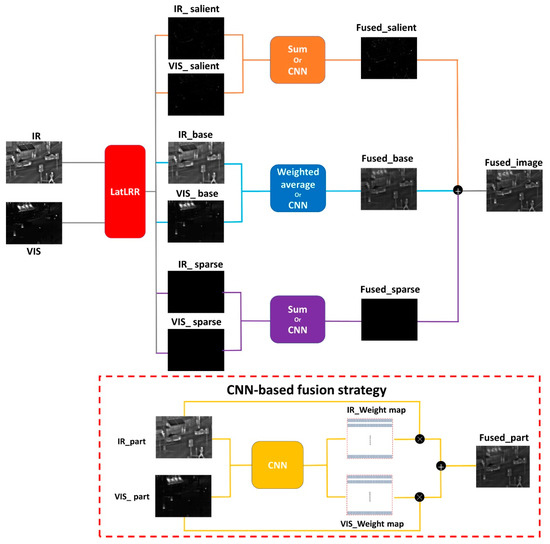
Figure 2.
The framework of the proposed method.
The methodologies referred to as VGG19_l1 norm and ResNet50_ZCA_l1 norm employ CNN models for feature map extraction. Following this step, the application of the l1 norm and a combined ZCA with l1 norm operation is utilized to reduce feature dimensionality while preserving crucial features, thereby obtaining weighted maps for subsequent fusion. Detailed procedural information regarding these methodologies can be found in the literature [5,6], with the expressions described as VGG19+l1 norm in Equations (4) and (5).
Here, represents the multi-layer fused part, denotes the weight maps extracted using VGG19, refers to the decomposed parts from both visible and infrared images, represents the number of image modalities, while stands for the number of layers, and symbolizes the ultimate fused part.
ResNet50_ZCA_l1 norm is represented through Equations (6)–(10).
In the equation set, represents the covariance matrix, where denotes the image modality, and signifies the channels of deep features. stands for the deep feature maps extracted by ResNet50. , represent the correlation matrices resulting from singular value decomposition (SVD). represents the deep feature maps after undergoing ZCA projection transformation from , and denotes the ZCA transformation matrix. I denotes the identity matrix, while ϵ serves as a small positive value utilized to stabilize matrix inversion. signifies the weight maps resulting from the after the application of the l1 norm operation. Here, t represents the window parameter used during the l1 norm operation, set to 2 in this study. refers to the decomposed parts from both visible and infrared images, symbolizes the ultimate fused part.
Finally, the fusion of visible and infrared images is obtained by summing the three merged parts, as illustrated in Equation (12).
3.4. Image Dataset
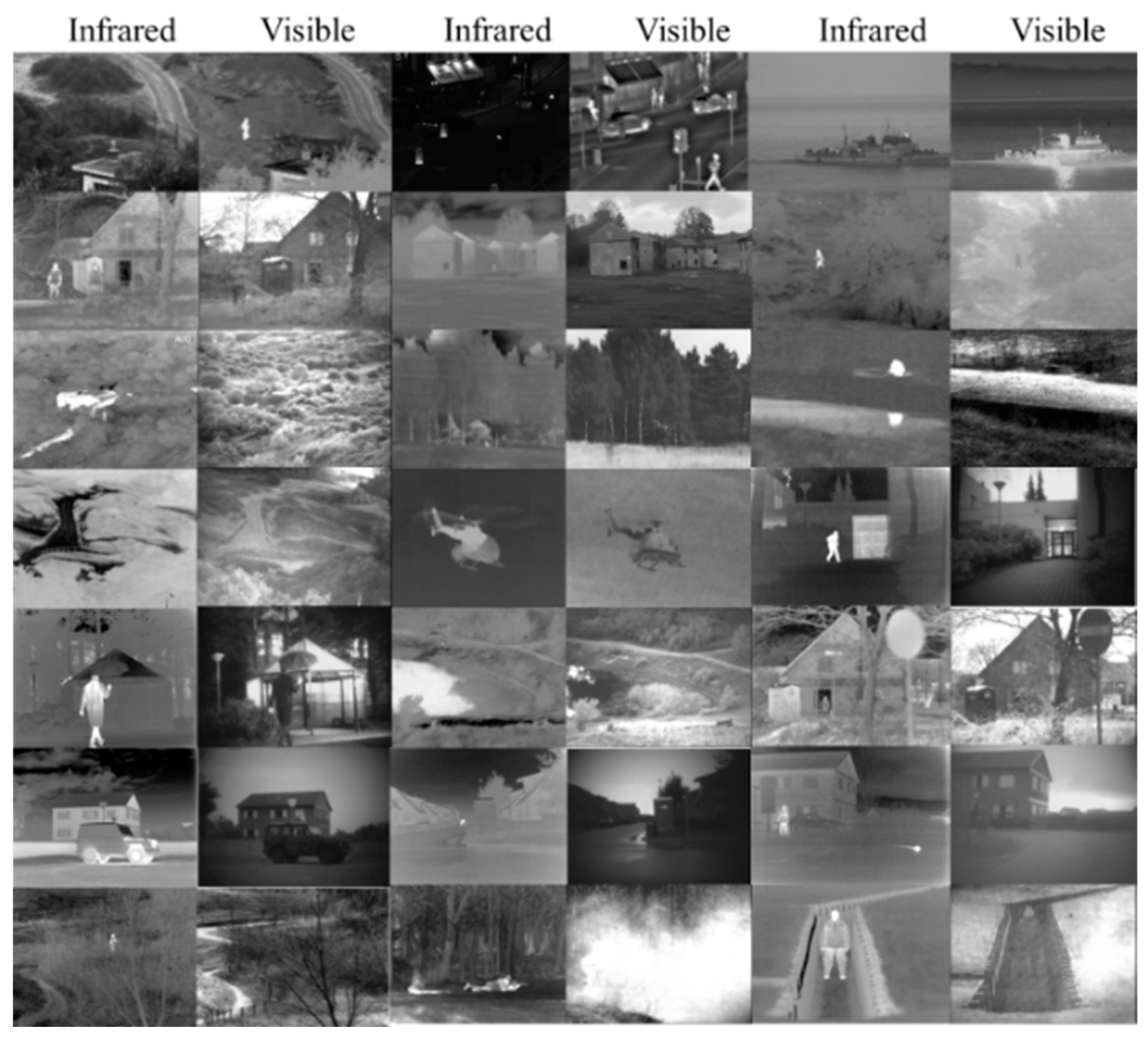
In this study, image pairs consisting of visible images and infrared images were sourced from the TNO image dataset. These image pairs encompass diverse military and surveillance scenarios captured during both day and night periods. They depict various objects and targets, including people, vehicles, ships, and aircraft, against different backgrounds such as rural and urban settings. A total of 21 aligned and processed pairs of visible images and infrared images were selected, as depicted in Figure 3.
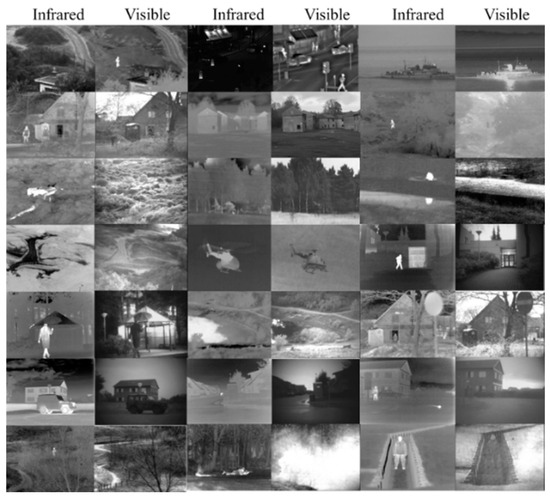
Figure 3.
Image pairs of visible images and infrared images (from TNO).
4. Results
For assessing the quality and performance of the fused images, this study employs a comprehensive evaluation comprising subjective (visual) and objective (quantitative) analyses. Subjective evaluation involves the direct perception and assessment of image quality, considering visual features like clarity, contrast, details, and textures of the fused images based on subjective perception and experience. Objective assessment utilizes quantitative indicators, including Entropy (EN), Mutual Information (MI), Quality Assessment of Fused Band-ratio Images (Qabf), Feature Mutual Information for pixel domain (FMI_pixel), Feature Mutual Information for DCT domain (FMI_dct), Feature Mutual Information for wavelet domain (FMI_w), Normalized Absolute Fused Error (Nabf), Spatial Consistency Deviation (SCD), Structural Similarity Index (SSIM), and Multi-Scale Structural Similarity Index (MS_SSIM). These metrics enable the quantification of properties such as similarity, fidelity, information preservation, and spectral consistency between the fused and original images. In evaluating the performance of the proposed image fusion method, not only were comparisons made among various methods proposed in this study, but also comparisons were conducted with 10 State-of-the-Art methods.
4.1. Objective Assessments
This part of the study focuses on measuring the effectiveness of different fusion approaches that include sparse components in the image fusion process. Table 1 and Table 2 present a comparative analysis of quantitative outcomes derived from different fusion techniques, using LatLRR image decomposition, Resnet50_ZCA_l1 norm, VGG19_l1 norm, weighted average, and summation. Additionally, these approaches are compared directly with the singular utilization of Resnet50_ZCA_l1 norm (Resnet50) and VGG19_l1 norm (VGG19), and the traditional LatLRR (WB + S) methods. The numerical values in these tables signify the absolute comparative performance of each fusion mode across multiple evaluation metrics, where, except for Nabf, higher values indicate superior fusion outcomes across the remaining nine indicators. Consistently, both tables demonstrate an overall enhancement across most evaluation metrics when integrating the sparse parts alongside the base and salient parts in image fusion, compared to strategies that overlook the sparse parts.

Table 1.
Comparison of quantitative evaluation metrics (Resnet50_ZCA_l1 norm).
Table 2.
Comparison of quantitative evaluation metrics (VGG19_l1 norm).
By employing a summation strategy for fusing the salient and sparse parts and adopting a CNN-based fusion methodology for the base parts (SS + NB + S), optimal values across metrics such as EN, MI, Qabf, and SCD can be attained. The study introduces two fusion strategies specifically for the sparse parts: summation and CNN-based fusion. While there is no significant discrepancy observed across most indicators between these strategies, the CNN-based fusion strategy demonstrates superior performance in Nabf. Concerning the base parts, CNN-based fusion strategies generally outperform weighted average, albeit with nuanced differences. In terms of the salient parts, a more pronounced disparity exists between CNN-based and summation fusion strategies. The CNN-based fusion manifests superiority in FMI_dct, Nabf, FMI_pixel, and SSIM, whereas the summation strategy excels in EN, MI, Qabf, SCD, and MS_SSIM.
Among the numerous proposed methods, no singular fusion method emerges as universally superior across all 10 assessment metrics. This aligns with the prevalent consensus in this domain that no single fusion method presently exhibits comprehensive advantages. Consequently, the choice of fusion method predominantly hinges upon user-specific requisites. Nevertheless, in an overarching evaluation encompassing multiple metrics, the proposed method employing the CNN-based method for sparse and base parts alongside summation for salient parts (NSS + NB + S) demonstrates robustness, reliability, and comprehensiveness across the metrics.
Table 3 and Table 4 present a comparative analysis of the impact of including or excluding the sparse parts in the image fusion process and employing various fusion strategies. The numerical values in these tables, expressed as percentage improvement rates (%), depict the extent of enhancement observed in different metrics upon integrating the sparse parts into the fusion strategy. The findings reveal that, excluding FMI_pixel and Nabf, most indicators suggest an augmented fusion performance with the inclusion of sparse parts. Notably, FMI_dct, FMI_w, and Nabf exhibit the most pronounced changes compared to other metrics. The utilization of a summation strategy for fusing sparse parts did not improve the performance in the Nabf indicator; instead, it experienced a decline. However, the implementation of a CNN-based method for fusing sparse parts mitigated the earlier limitations and notably amplified the performance in the Nabf indicator. Consequently, an integrated analysis of Table 1, Table 2, Table 3 and Table 4 underscores the efficacy of employing a CNN-based approach for both sparse and base parts, complemented by a summation method for salient parts (NSS + NB + S). This fusion strategy demonstrates relatively superior performance in terms of both image fusion quality and feature similarity. It effectively preserves the inherent characteristics of the original image while minimizing disparities between the fused image and the original, indicating commendable efficacy in information preservation and error reduction.
Table 3.
Comparison of improvement after incorporating the sparse parts (Resnet50_ZCA_l1 norm).
Table 4.
Comparison of improvement after incorporating the sparse parts (VGG19_l1 norm).
Table 5 presents a quantitative comparison between the proposed method in this study and 10 existing outstanding methods, encompassing both traditional and deep learning-based approaches. The results show that no single method has absolute superiority. Compared to the 10 State-of-the-Art (SOTA) methods, the proposed method in this study demonstrates better performance in the FMI_dct, FMI_w, Nabf, and SSIM indicators. It also shows impressive performance in the FMI_pixel, SCD, and MS_SSIM indicators, with only slightly poorer performance in EN, MI, and Qabf. These results illustrate that the proposed method not only benefits from incorporating sparse parts but also demonstrates the advantages of combining LatLRR with Resnet50, achieving a complementary effect. It maintains different methods’ performances in individual indicators.
Table 5.
Comparison of quantitative evaluation metrics with SOTA methods.
4.2. Subjective Assessments
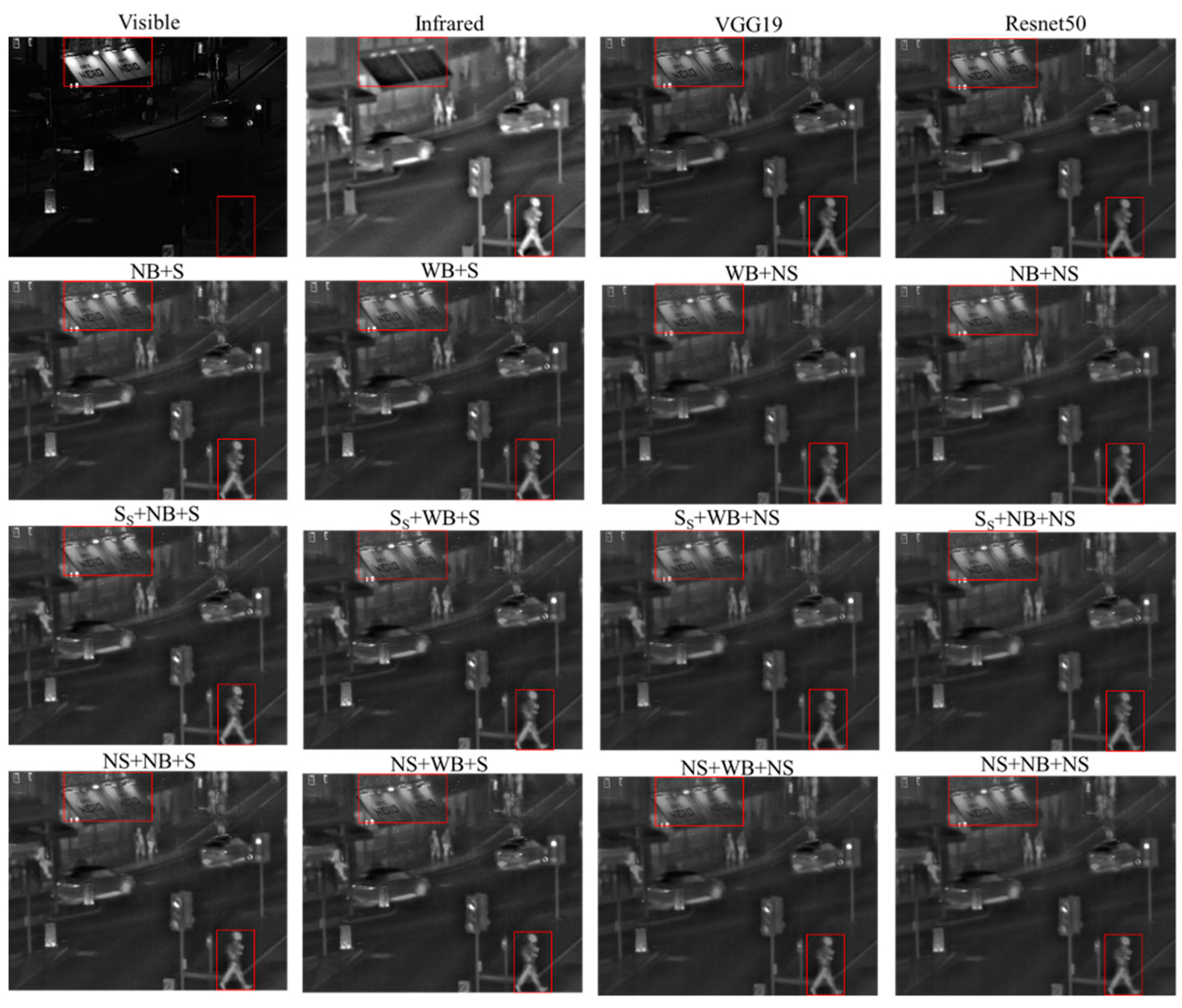
The results of this section demonstrate the subjective evaluation of visual performance achieved by incorporating sparse components as part of the fusion process. In Figure 4, the outcomes of image fusion based on LatLRR are presented, showcasing the visual comparisons of different fusion strategies proposed in this study, including Resnet50_ZCA_l1 norm, weighted average, and summation. Despite the objective quantitative analysis indicating a significant enhancement in fusion performance with the inclusion of sparse parts, it is challenging for human observers to visually discern the differences in fusion outcomes when considering the limitations of human visual perception in the presence of sparse parts. We consider this to be an acceptable result, acknowledging that theoretically sparse parts contain less information, thus constraining human visual observation of these components. However, this does not imply their negligible importance, as evident from the quantitative results.
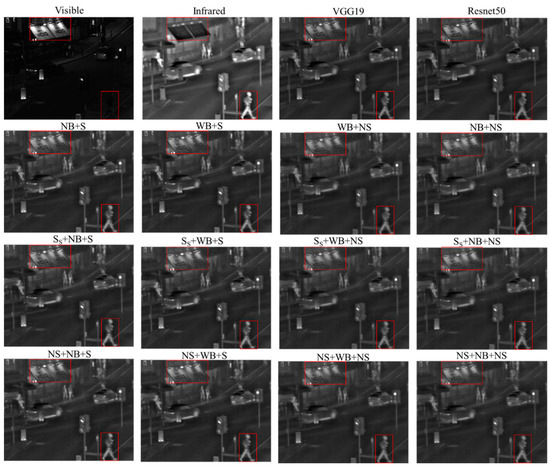
Figure 4.
Fused images (NB, NS, NSS: Fused base part, fused salient part, and fused sparse part using Resnet50_ZCA_l1 norm, S, SS: Fused salient part and fused sparse part using summation, WB: Fused base part using weighted average). (The red box indicates the focal areas during the Subjective Assessments.).
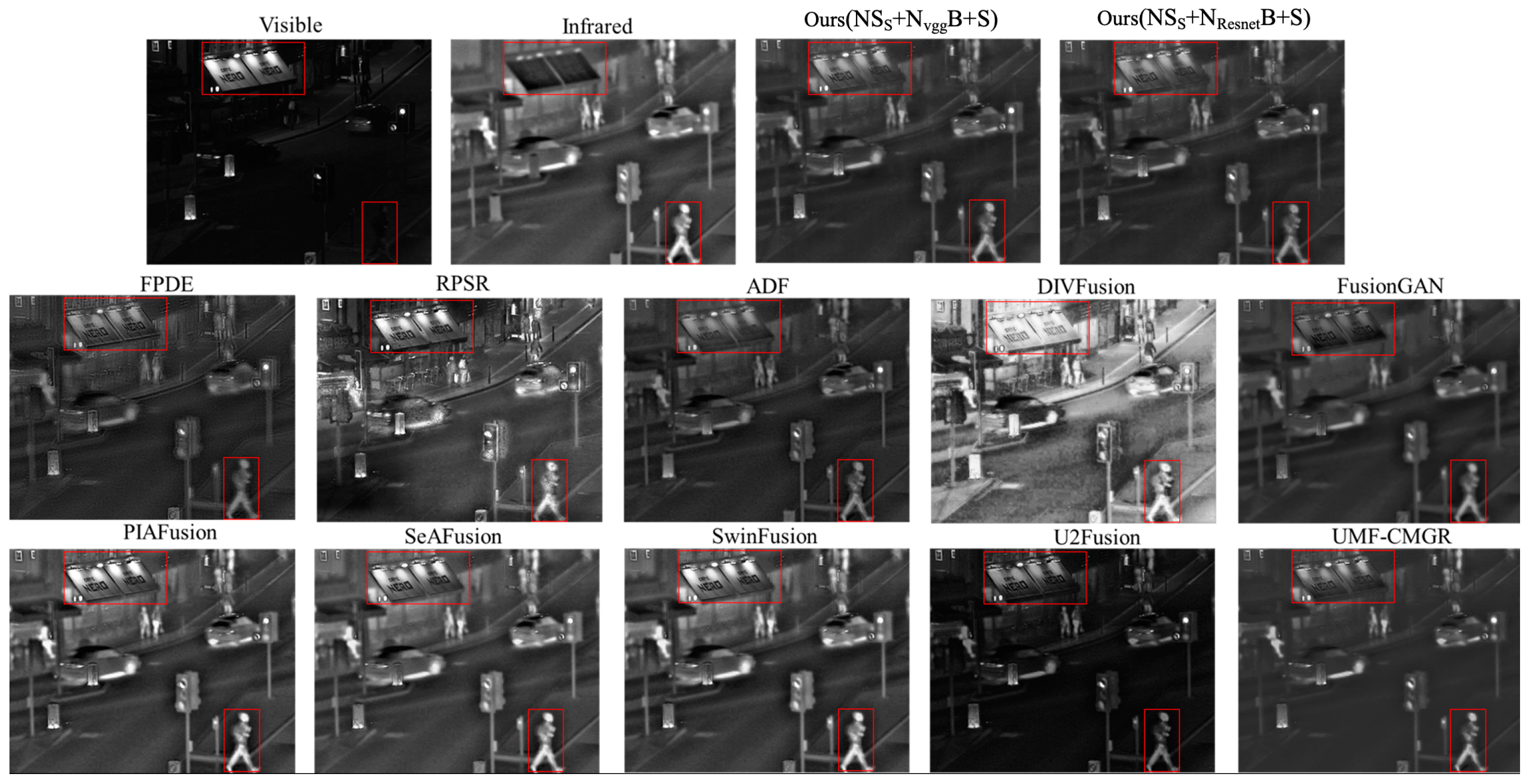
Figure 5 illustrates the comparison between the proposed optimal fusion strategies (SS + NvggB + S, SS + NResnetB + S) and 10 other State-of-the-Art methods. The results demonstrate that the proposed method effectively showcases pedestrians and signage after the fusion of visible and infrared images, achieving satisfactory image fusion outcomes. This aligns with the quantitative evaluation results in Section 4.1, affirming the effectiveness and reliability of the proposed method. The other 10 methods also exhibit their unique fusion styles, as indicated by the quantitative results in Section 4.1, each having its own advantages. However, subjective assessments are susceptible to individual biases and inherent limitations in human visual perception. Therefore, the judgment of visual effects should be considered in the context of specific application scenarios.
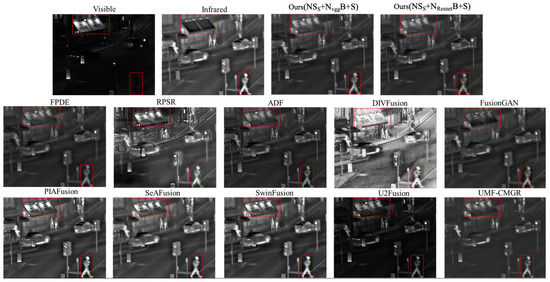
Figure 5.
Comparison of fused images with SOTA methods. (The red box indicates the focal areas during the Subjective Assessments.).
As mentioned earlier in this study, previous image fusion methodologies based on LatLRR exclusively focused on fusion strategies concerning the base and salient parts, disregarding the sparse part by considering it as noise in the LatLRR image decomposition process. From the LatLRR theoretical perspective, these considerations are justifiable. Nevertheless, it is essential to note whether the sparse part solely comprises noise or potentially encapsulates crucial image information that could significantly contribute to improved fusion performance. The findings of this study demonstrate that regarding the sparse part as an innovative facet of the fusion process, unlike prior research, leads to substantial enhancements. The experimental validation of this concept in this study bears significant implications for LatLRR-based image fusion methodologies. Moreover, by amalgamating various fusion strategies and comparing their performance, this research proposes superior fusion strategies for consideration by subsequent researchers.
5. Discussion and Conclusions
In previous research, the image fusion strategies based on the LatLRR method predominantly focused on processing the base parts and salient parts, while regrettably disregarding the sparse parts. This oversight is noteworthy, as all three components originate from the original visible and infrared images. This operational approach risks the loss of crucial image information, failing to authentically represent the inherent characteristics of the original images, thus impeding the efficacy of the image fusion. Hence, this study advocates for the integration of the sparse parts as an integral element within the image fusion process. To articulate, it aims to concurrently amalgamate the base parts, salient parts, and sparse parts in strategies employed for visible and infrared image fusion.
Beyond employing conventional weighted average and summation techniques, this study leverages pre-trained CNN-based models, such as VGG19 and ResNet50, to extract image key features. It additionally integrates the l1 norm and ZCA+ l1 norm to derive weight maps. Findings from this study underscore that the inclusion of the sparse parts within the fusion process yields superior fusion performance compared to its exclusion. The incorporation of the sparse parts via CNN-based methodologies to obtain weight maps notably enhances the FMI_dct, FMI_w, and Nabf indicators. Amongst diverse strategy combinations, utilizing CNN-based methodologies to individually merge the base parts and sparse parts, while using summation to fuse the salient parts, emerges as the suggested fusion strategy within this study.
The fusion model amalgamating LatLRR with CNN effectively integrates the respective strengths of each method, thereby yielding a more robust and comprehensive fusion performance. The outcomes of this study bear substantial value for both academic and practical applications. They can be utilized in diverse multimodal sensing devices that incorporate visible and infrared imagery, such as drones, robots, or surveillance equipment, to enhance their sensing capabilities significantly.
Author Contributions
Conceptualization, C.-Y.H. and Y.-C.C.; methodology, Y.-C.C. and C.-Y.H.; software, Y.-C.C.; validation, C.-Y.H., Y.-C.C., T.-Y.C., and F.-S.N.; formal analysis, Y.-C.C. and C.-Y.H.; investigation, Y.-C.C. and C.-Y.H.; resources, M.-H.C., C.-Y.H., T.-Y.C., and F.-S.N.; data curation, Y.-C.C. and C.-Y.H.; writing—original draft preparation, Y.-C.C. and C.-Y.H.; writing—review and editing, Y.-C.C., C.-Y.H., M.-H.C., T.-Y.C., and F.-S.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Publicly available datasets were analyzed in this study. These data can be found here: [https://doi.org/10.6084/m9.figshare.1008029.v2], accessed on 20 August 2023.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Munir, A.; Kwon, J.; Lee, J.H.; Kong, J.; Blasch, E.; Aved, A.J.; Muhammad, K. FogSurv: A fog-assisted architecture for urban surveillance using artificial intelligence and data fusion. IEEE Access 2021, 9, 111938–111959. [Google Scholar] [CrossRef]
- Farahnakian, F.; Poikonen, J.; Laurinen, M.; Makris, D.; Heikkonen, J. Visible and infrared image fusion framework based on RetinaNet for marine environment. In Proceedings of the 2019 22nd International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; pp. 1–7. [Google Scholar]
- Yadav, R.; Samir, A.; Rashed, H.; Yogamani, S.; Dahyot, R. Cnn based color and thermal image fusion for object detection in automated driving. In Proceedings of the Irish Machine Vision and Image Processing, Sligo, Ireland, 31 August–2 September 2020; pp. 1–8. [Google Scholar]
- Azam, M.A.; Khan, K.B.; Salahuddin, S.; Rehman, E.; Khan, S.A.; Khan, M.A.; Kadry, S.; Gandomi, A.H. A review on multimodal medical image fusion: Compendious analysis of medical modalities, multimodal databases, fusion techniques and quality metrics. Comput. Biol. Med. 2022, 144, 105253. [Google Scholar] [CrossRef]
- Zhou, T.; Li, Q.; Lu, H.; Cheng, Q.; Zhang, X. GAN review: Models and medical image fusion applications. Inf. Fusion 2023, 91, 134–148. [Google Scholar] [CrossRef]
- Nagarani, N.; Venkatakrishnan, P.; Balaji, N. Unmanned Aerial vehicle’s runway landing system with efficient target detection by using morphological fusion for military surveillance system. Comput. Commun. 2020, 151, 463–472. [Google Scholar] [CrossRef]
- Ma, W.; Wang, K.; Li, J.; Yang, S.X.; Li, J.; Song, L.; Li, Q. Infrared and Visible Image Fusion Technology and Application: A Review. Sensors 2023, 23, 599. [Google Scholar] [CrossRef]
- Karim, S.; Tong, G.; Li, J.; Qadir, A.; Farooq, U.; Yu, Y. Current advances and future perspectives of image fusion: A comprehensive review. Inf. Fusion 2023, 90, 185–217. [Google Scholar] [CrossRef]
- Krishnan, B.S.; Jones, L.R.; Elmore, J.A.; Samiappan, S.; Evans, K.O.; Pfeiffer, M.B.; Blackwell, B.F.; Iglay, R.B. Fusion of visible and thermal images improves automated detection and classification of animals for drone surveys. Sci. Rep. 2023, 13, 10385. [Google Scholar] [CrossRef]
- Singh, S.; Singh, H.; Gehlot, A.; Kaur, J.; Gagandeep. IR and visible image fusion using DWT and bilateral filter. Microsyst. Technol. 2023, 29, 457–467. [Google Scholar] [CrossRef]
- Xu, H.; Wang, Y.; Wu, Y.; Qian, Y. Infrared and multi-type images fusion algorithm based on contrast pyramid transform. Infrared Phys. Technol. 2016, 78, 133–146. [Google Scholar] [CrossRef]
- Ibrahim, S.; Wirth, M. Visible and IR data fusion technique using the contourlet transform. In Proceedings of the 2009 International Conference on Computational Science and Engineering, Vancouver, BC, Canada, 29–31 August 2009; pp. 42–47. [Google Scholar]
- Adu, J.; Gan, J.; Wang, Y.; Huang, J. Image fusion based on nonsubsampled contourlet transform for infrared and visible light image. Infrared Phys. Technol. 2013, 61, 94–100. [Google Scholar] [CrossRef]
- Bavirisetti, D.P.; Xiao, G.; Liu, G. Multi-sensor image fusion based on fourth order partial differential equations. In Proceedings of the 2017 20th International Conference on Information Fusion (Fusion), Xi’an, China, 10–13 July 2017; pp. 1–9. [Google Scholar]
- Bavirisetti, D.P.; Dhuli, R. Fusion of infrared and visible sensor images based on anisotropic diffusion and Karhunen-Loeve transform. IEEE Sens. J. 2015, 16, 203–209. [Google Scholar] [CrossRef]
- Wang, P.-F.; Luo, X.-Q.; Li, X.-Y.; Zhang, Z.-C. Image fusion based on shift invariant shearlet transform and stacked sparse autoencoder. J. Algorithms Comput. Technol. 2018, 12, 73–84. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Y.; Huang, S.; Zuo, Y.; Sun, J. Infrared and visible image fusion using visual saliency sparse representation and detail injection model. IEEE Trans. Instrum. Meas. 2020, 70, 5001715. [Google Scholar] [CrossRef]
- Nirmalraj, S.; Nagarajan, G. Fusion of visible and infrared image via compressive sensing using convolutional sparse representation. ICT Express 2021, 7, 350–354. [Google Scholar] [CrossRef]
- Li, X.; Tan, H.; Zhou, F.; Wang, G.; Li, X. Infrared and visible image fusion based on domain transform filtering and sparse representation. Infrared Phys. Technol. 2023, 131, 104701. [Google Scholar] [CrossRef]
- Fakhari, F.; Mosavi, M.R.; Lajvardi, M.M. Image fusion based on multi-scale transform and sparse representation: An image energy approach. IET Image Process. 2017, 11, 1041–1049. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, S.; Wang, Z. A general framework for image fusion based on multi-scale transform and sparse representation. Inf. Fusion 2015, 24, 147–164. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, Y.; Sun, P.; Yan, H.; Zhao, X.; Zhang, L. IFCNN: A general image fusion framework based on convolutional neural network. Inf. Fusion 2020, 54, 99–118. [Google Scholar] [CrossRef]
- An, W.-B.; Wang, H.-M. Infrared and visible image fusion with supervised convolutional neural network. Optik 2020, 219, 165120. [Google Scholar] [CrossRef]
- Wang, H.; An, W.; Li, L.; Li, C.; Zhou, D. Infrared and visible image fusion based on multi-channel convolutional neural network. IET Image Process. 2022, 16, 1575–1584. [Google Scholar] [CrossRef]
- Khalid, B.; Khan, A.M.; Akram, M.U.; Batool, S. Person detection by fusion of visible and thermal images using convolutional neural network. In Proceedings of the 2019 2nd International Conference on Communication, Computing and Digital systems (C-CODE), Islamabad, Pakistan, 6–7 March 2019; pp. 143–148. [Google Scholar]
- Tang, L.; Yuan, J.; Ma, J. Image fusion in the loop of high-level vision tasks: A semantic-aware real-time infrared and visible image fusion network. Inf. Fusion 2022, 82, 28–42. [Google Scholar] [CrossRef]
- Tang, L.; Yuan, J.; Zhang, H.; Jiang, X.; Ma, J. PIAFusion: A progressive infrared and visible image fusion network based on illumination aware. Inf. Fusion 2022, 83, 79–92. [Google Scholar] [CrossRef]
- Wang, D.; Liu, J.; Fan, X.; Liu, R. Unsupervised misaligned infrared and visible image fusion via cross-modality image generation and registration. arXiv 2022, arXiv:2205.11876. [Google Scholar]
- Xu, H.; Ma, J.; Jiang, J.; Guo, X.; Ling, H. U2Fusion: A unified unsupervised image fusion network. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 44, 502–518. [Google Scholar] [CrossRef]
- Li, H.; Wu, X.-J.; Durrani, T.S. Infrared and visible image fusion with ResNet and zero-phase component analysis. Infrared Phys. Technol. 2019, 102, 103039. [Google Scholar] [CrossRef]
- Li, H.; Wu, X.-J.; Kittler, J. Infrared and visible image fusion using a deep learning framework. In Proceedings of the 2018 24th International Conference on Pattern Recognition (ICPR), Beijing, China, 20–24 August 2018; pp. 2705–2710. [Google Scholar]
- Zhou, J.; Ren, K.; Wan, M.; Cheng, B.; Gu, G.; Chen, Q. An infrared and visible image fusion method based on VGG-19 network. Optik 2021, 248, 168084. [Google Scholar] [CrossRef]
- Zhang, L.; Li, H.; Zhu, R.; Du, P. An infrared and visible image fusion algorithm based on ResNet-152. Multimed. Tools Appl. 2022, 81, 9277–9287. [Google Scholar] [CrossRef]
- Ciprián-Sánchez, J.F.; Ochoa-Ruiz, G.; Gonzalez-Mendoza, M.; Rossi, L. FIRe-GAN: A novel deep learning-based infrared-visible fusion method for wildfire imagery. Neural Comput. Appl. 2021, 35, 18201–18213. [Google Scholar] [CrossRef]
- Zhang, H.; Yuan, J.; Tian, X.; Ma, J. GAN-FM: Infrared and visible image fusion using GAN with full-scale skip connection and dual Markovian discriminators. IEEE Trans. Comput. Imaging 2021, 7, 1134–1147. [Google Scholar] [CrossRef]
- Palsson, F.; Sveinsson, J.R.; Ulfarsson, M.O. Single sensor image fusion using a deep convolutional generative adversarial network. In Proceedings of the 2018 9th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Amsterdam, The Netherlands, 23–26 September 2018; pp. 1–5. [Google Scholar]
- Xu, H.; Liang, P.; Yu, W.; Jiang, J.; Ma, J. Learning a Generative Model for Fusing Infrared and Visible Images via Conditional Generative Adversarial Network with Dual Discriminators. In Proceedings of the 28th International Joint Conference on Artificial Intelligence, Macao, China, 10–16 August 2019; pp. 3954–3960. [Google Scholar]
- Safari, M.; Fatemi, A.; Archambault, L. MedFusionGAN: Multimodal medical image fusion using an unsupervised deep generative adversarial network. BMC Med. Imaging 2023, 23, 203. [Google Scholar] [CrossRef]
- Li, J.; Huo, H.; Liu, K.; Li, C. Infrared and visible image fusion using dual discriminators generative adversarial networks with Wasserstein distance. Inf. Sci. 2020, 529, 28–41. [Google Scholar] [CrossRef]
- Ma, J.; Yu, W.; Liang, P.; Li, C.; Jiang, J. FusionGAN: A generative adversarial network for infrared and visible image fusion. Inf. Fusion 2019, 48, 11–26. [Google Scholar] [CrossRef]
- Xu, H.; Gong, M.; Tian, X.; Huang, J.; Ma, J. CUFD: An encoder–decoder network for visible and infrared image fusion based on common and unique feature decomposition. Comput. Vis. Image Underst. 2022, 218, 103407. [Google Scholar] [CrossRef]
- Chidambaram, G.; Bineeshia, J. Infrared and Visible Image Fusion using Enhanced Thermal Image. In Proceedings of the 2023 International Conference on Intelligent Systems for Communication, IoT and Security (ICISCoIS), Coimbatore, India, 9–11 February 2023; pp. 392–397. [Google Scholar]
- Jian, L.; Yang, X.; Liu, Z.; Jeon, G.; Gao, M.; Chisholm, D. SEDRFuse: A symmetric encoder–decoder with residual block network for infrared and visible image fusion. IEEE Trans. Instrum. Meas. 2020, 70, 5002215. [Google Scholar] [CrossRef]
- Ren, L.; Pan, Z.; Cao, J.; Liao, J. Infrared and visible image fusion based on variational auto-encoder and infrared feature compensation. Infrared Phys. Technol. 2021, 117, 103839. [Google Scholar] [CrossRef]
- Ataman, F.C.; Akar, G.B. Visible and infrared image fusion using encoder-decoder network. In Proceedings of the 2021 IEEE International Conference on Image Processing (ICIP), Anchorage, AK, USA, 19–22 September 2021; pp. 1779–1783. [Google Scholar]
- Tang, L.; Xiang, X.; Zhang, H.; Gong, M.; Ma, J. DIVFusion: Darkness-free infrared and visible image fusion. Inf. Fusion 2023, 91, 477–493. [Google Scholar] [CrossRef]
- Gillioz, A.; Casas, J.; Mugellini, E.; Abou Khaled, O. Overview of the Transformer-based Models for NLP Tasks. In Proceedings of the 2020 15th Conference on Computer Science and Information Systems (FedCSIS), Sofia, Bulgaria, 6–9 September 2020; pp. 179–183. [Google Scholar]
- Tang, W.; He, F.; Liu, Y.; Duan, Y.; Si, T. DATFuse: Infrared and visible image fusion via dual attention transformer. IEEE Trans. Circuits Syst. Video Technol. 2023, 33, 3159–3172. [Google Scholar] [CrossRef]
- Vs, V.; Valanarasu, J.M.J.; Oza, P.; Patel, V.M. Image fusion transformer. In Proceedings of the 2022 IEEE International Conference on Image Processing (ICIP), Bordeaux, France, 16–19 October 2022; pp. 3566–3570. [Google Scholar]
- Rao, D.; Xu, T.; Wu, X.-J. Tgfuse: An infrared and visible image fusion approach based on transformer and generative adversarial network. IEEE Trans. Image Process. 2023; early access. [Google Scholar] [CrossRef]
- Tang, W.; He, F.; Liu, Y. TCCFusion: An infrared and visible image fusion method based on transformer and cross correlation. Pattern Recognit. 2023, 137, 109295. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, Y.; Shao, W.; Li, H.; Zhang, L. SwinFuse: A residual swin transformer fusion network for infrared and visible images. IEEE Trans. Instrum. Meas. 2022, 71, 5016412. [Google Scholar] [CrossRef]
- Ma, J.; Tang, L.; Fan, F.; Huang, J.; Mei, X.; Ma, Y. SwinFusion: Cross-domain long-range learning for general image fusion via swin transformer. IEEE/CAA J. Autom. Sin. 2022, 9, 1200–1217. [Google Scholar] [CrossRef]
- Li, H.; Wu, X.-J. Infrared and visible image fusion using latent low-rank representation. arXiv 2018, arXiv:1804.08992. [Google Scholar]
- Yang, Y.; Gao, C.; Ming, Z.; Guo, J.; Leopold, E.; Cheng, J.; Zuo, J.; Zhu, M. LatLRR-CNN: An infrared and visible image fusion method combining latent low-rank representation and CNN. Multimed. Tools Appl. 2023, 82, 36303–36323. [Google Scholar] [CrossRef]
- Li, H.; Wu, X.-J.; Kittler, J. MDLatLRR: A novel decomposition method for infrared and visible image fusion. IEEE Trans. Image Process. 2020, 29, 4733–4746. [Google Scholar] [CrossRef] [PubMed]
- Prema, G.; Arivazhagan, S.; Aishwarya, C.; Dharani, S. Infrared and Visible image fusion using LatLRR and ResNet. Res. Sq. 2022. [Google Scholar] [CrossRef]
- Huang, Y.; Zhang, Z.; Wen, X. Infrared and visible image fusion method based on LatLRR and ICA. In Proceedings of the 2021 International Conference on Pattern Recognition and Intelligent Systems, Bangkok, Thailand, 28–30 July 2021; pp. 20–23. [Google Scholar]
- Liu, G.; Yan, S. Latent low-rank representation for subspace segmentation and feature extraction. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 1615–1622. [Google Scholar]
- Liu, G.; Lin, Z.; Yu, Y. Robust subspace segmentation by low-rank representation. In Proceedings of the 27th International Conference on Machine Learning (ICML-10), Haifa, Israel, 21–24 June 2010; pp. 663–670. [Google Scholar]
- Tao, T.; Liu, M.-X.; Hou, Y.; Wang, P.; Yang, D.; Zhang, Q. Latent low-rank representation with sparse consistency constraint for infrared and visible image fusion. Optik 2022, 261, 169102. [Google Scholar] [CrossRef]
- Liu, J.; Fan, X.; Huang, Z.; Wu, G.; Liu, R.; Zhong, W.; Luo, Z. Target-aware dual adversarial learning and a multi-scenario multi-modality benchmark to fuse infrared and visible for object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 5802–5811. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).