1. Introduction
The modern world witnesses an increasing scientific interest in wireless sensor networks (WSNs): networks of multiple spatially dispersed independent sensors that monitor some environmental and physical data and collectively transmit them to a central station (aggregator) [
1]. The fast development of such networks and the Internet of Things (IoT) leads to the need for new context-aware smart sensors deployed in numerous fields, such as precision agriculture [
2], industry [
3], transportation [
4], security [
5], education services [
6], and healthcare [
7]. However, these emerging applications impose certain design constraints: such sensors should remain reliable, compact, and cheap, with a lifetime of several years. In particular, reducing energy consumption in wireless smart sensors in order to improve their autonomy is one of the most challenging and necessary tasks.
In some applications, where anomalies or events are detected, the processing is performed on the captured signal to extract characteristic information from it, i.e., “features”, which can then be used by classification or regression algorithms. The conventional wireless sensor approach implies that both feature extraction and classification are performed at the aggregator level after receiving the samples sent from sensors. In this case, the signals are acquired at sampling frequencies based on the Shannon–Nyquist theorem, allowing the complete signal information to be maintained. Due to a relatively high Nyquist rate, the transmission of all samples constitutes a significant part of the sensor’s total consumption budget. When only certain specific information contained in the signal is helpful for the detection task, this approach turns out to be energetically inefficient. Hence, minimizing the volume of data transmitted from the sensor to the aggregator is critical.
For this purpose, several architectures of analog-to-information (A2I) conversion have been proposed to implement a well-known compressive sampling (CS) technique [
8], which relies on the fact that most real signals can be considered sparse or compressible after transformation into some domain. CS combines acquisition and compression processes and allows the original signal to be recovered from this compressed data with fewer measurements than in traditional methods. Nonetheless, it exhibits a constrained compression ratio [
9] and performs a complete signal reconstruction, which remains superfluous in the previously mentioned applications focused on detecting anomalies or events. Moreover, complex sparse recovery algorithms are required to rebuild a sparse signal from an undersampled set of measurements [
10,
11], which entails severe energy and time costs.
On the contrary, analog-to-feature (A2F) conversion is capable of further reducing the quantity of transmitted data. To accomplish this task, it only extracts useful features relevant to the specific task from the analog signal [
12] directly in the sensor node. These features are then digitized and transmitted to a remote aggregator or serve as inputs for machine learning (ML) algorithms for classification within the sensor. The first method performs the anomaly or event detection at the aggregator. At the same time, the second allows for more efficient frugal communication by sending only the classification results and, thus, reduces the consumption due to wireless transmission. Nevertheless, the implementation of the classifier at the sensor level will increase its power consumption. The A2F approach facilitates the deployment of a low-power IoT as the entire communication chain is relieved regarding the quantity of sent data and required throughput. For a successful implementation of A2F conversion, one should define, for a given application, the relevant features for extraction and how to extract them.
One of the drawbacks of current A2F converter solutions is that they are designed for specific applications [
13,
14]. In this paper, extending the findings presented in [
15], our objective is to design a generic, reconfigurable A2F converter suitable for processing several types of signals with low sampling frequencies (below hundreds of kilohertz). Our work follows the one carried out in [
16], where the A2F conversion approach has been applied for binary arrhythmia detection in electrocardiogram (ECG) signals, outperforming alternative acquisition techniques (conventional Nyquist rate sampling and CS) in terms of power efficiency and hardware simplicity. Effectively, ECG wearable sensors allowing for cardiac activity measurement represent an example of sensors constituting body area sensor networks (BASNs), which are strongly constrained in the energy available for sensor consumption.
Usually, the arrhythmia detection process consists of four main consecutive steps: data collection, noise removal, feature engineering, and classification [
17]. Feature engineering involves the extraction of specific features from the ECG waveform. Some studies use raw signals due to the increasing popularity of deep learning (DL) methods [
18], while others identify fiducial points such as QRS-complex, ST-segment, R-peak, and P- and T-waves. Many traditional signal processing approaches have been proposed for feature engineering, such as wavelet transform and its variations, methods based on time domain and mathematical morphology, and derivative-based techniques, to name a few. Among ML approaches, we can enumerate mode decomposition, K-nearest neighbors (KNNs), naïve Bayes (NB), and support vector machine (SVM). Once the required features have been extracted, the last stage classifies the ECG signal with the help of traditional or ML approaches. The first group includes, for example, threshold-based techniques, principle component analysis, multi-model decision learning, etc. Whereas SVM, decision tree (DT), random forest (RF), convolutional neural network (CNN), long short-term memory (LSTM), and plenty of other methods belong to ML approaches.
Herein, we adopted the A2F converter’s architecture based on the non-uniform wavelet sampling (NUWS) [
19] to perform the feature extraction and selected arrhythmia detection as the first application for the developed converter.
The evolution of IoT has enabled the deployment of numerous edge devices equipped with inertial sensors. These sensors provide researchers with collections of unprocessed physiological signals suitable for analyzing human activities [
20]. In addition to ECG sensors, these inertial sensors, including accelerometers and gyroscopes, can also be a part of power-constrained BASN. Human activity recognition (HAR) using such signals has emerged as a highly explored domain [
21], driven by the growing demand for diverse human-centric applications such as smart home systems, sports tracking, and health monitoring [
22,
23].
Like arrhythmia detection, motion sensor-based HAR systems perform four principal steps, but one may require additional pre-processing between denoising and feature extraction, e.g., to separate body and gravitational acceleration [
24]. The three primary feature extraction and selection methods are classical hand-crafted features, automatic feature generation through DL methods, and their hybrid. The produced features are fed to a traditional ML or DL model for classification. Traditional ML methods, including DT [
25], SVM [
26], RF [
27], KNN [
28], and the hidden Markov model [
29], have already achieved remarkable success in HAR by surpassing the classification accuracy of DL techniques for specific datasets. However, CNN models, which obviate the need for hand-crafted feature extraction [
30], have taken the lead in this field [
31]. A novel approach proposed in [
32] transforms human activities into a high-level feature space with highly interpretable categorical features whose combinations are unique across activities. The classification problem is thereby broken into multiple sub-problems and a combination task. The principal advantage of this method is its extensibility to new activities and datasets.
Given that HAR is a typical pattern recognition task, we introduce it as a second application of the designed A2F converter to prove its universality and suitability for diverse sensing use cases. In order to reduce the amount of transmitted data, the developed converter will extract only a handful of relevant features from the input signal. As a result, using simple classifiers should suffice, eliminating the need for CNN models. The relevant features for extraction that are defined during the classifiers’ simulations for both applications will serve as a basis for the complete circuit design.
In summary, the main contributions of this paper are as follows: (1) the expansion of simulation results for both applications and derived hardware specifications based on relevant extracted features; (2) the choice of appropriate circuit solutions for elements constituting the A2F converter; (3) the design and simulation of a Gm-C integrator at the schematic level; (4) the estimation of energy consumption showing the advantages of the developed approach.
The rest of the paper proceeds as follows. In
Section 2, we introduce the architecture of the developed A2F converter and the details of feature extraction and selection processes.
Section 3 provides the results of training and evaluating the classifiers for our applications, which are then used in
Section 4 to deduce the specifications for the converter’s hardware implementation.
Section 5 presents the simulations of a G
m-C integrator executed at the schematic level. The power consumption of this circuit is used next in
Section 6 to estimate the energy consumed by the communication chain employing the A2F converter.
Section 7 summarizes our research conclusions and perspectives for further work.
5. Gm-C Integrator Design
In this section, we present the simulations of the first-order LPF (G
m-C integrator) based on the design in [
68] and define its biasing and control voltages to achieve a cut-off frequency low enough for the explored A2F converter’s applications. The schematic of the G
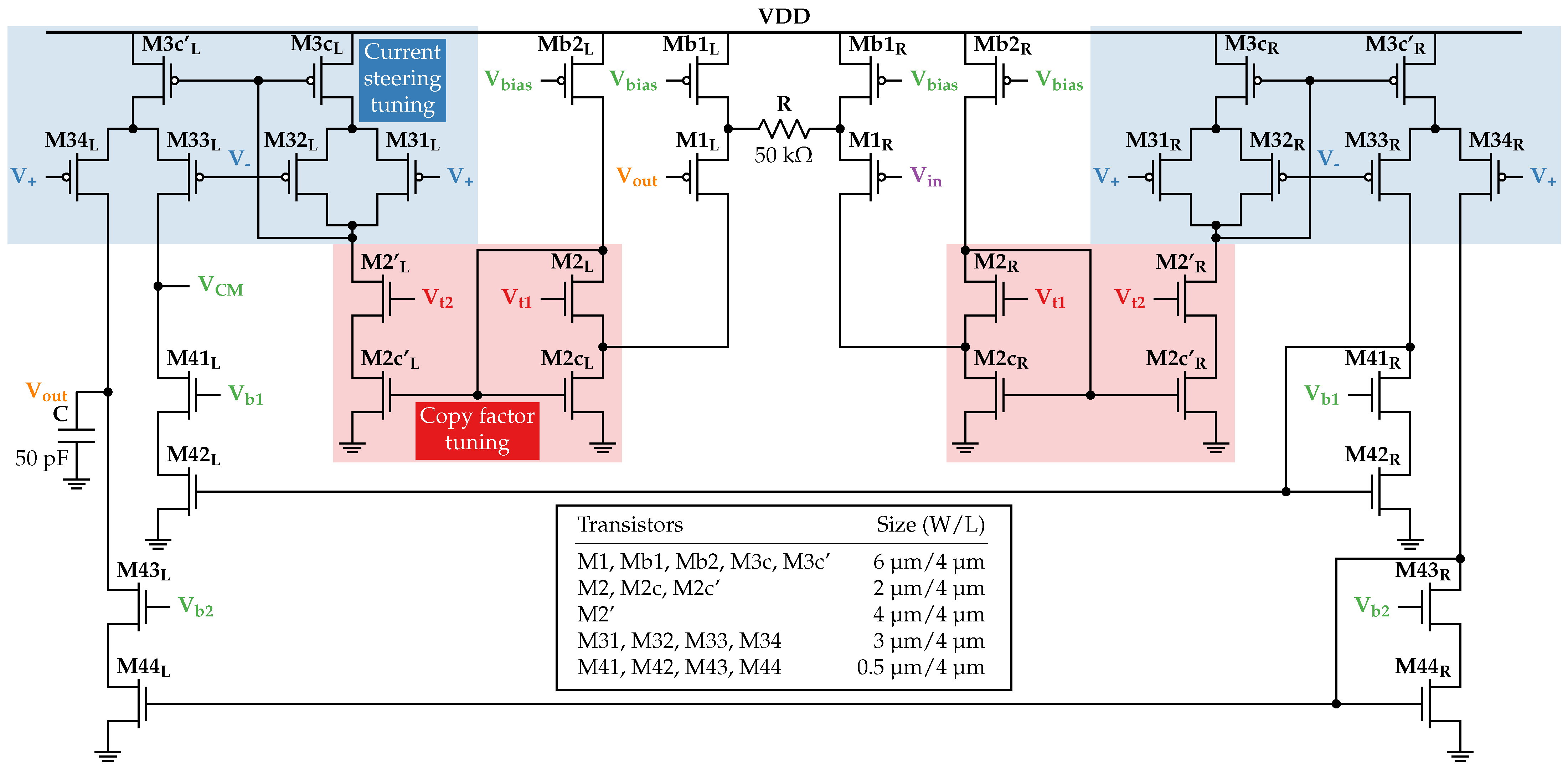
m-C integrator is shown in
Figure 11 with all transistors’ dimensions. It is based on a classic mirrored operational transconductance amplifier (OTA) with a degenerated PMOS input differential pair. The minimization of the cut-off frequency in this circuit is achieved either by maximizing the loading capacitance or by minimizing the OTA’s transconductance. While the technology limitations might restrict the former (we set it to 50
), the latter is adjusted in this circuit with the help of two techniques. The first one, copy factor tuning, allows controlling the amounts of complementary currents copied from the input stage through the NMOS high swing cascode current mirror (transistors M2, M2c, and M2c’) by setting
. The second technique, current steering tuning, splits the current passed through the 1:1 PMOS high swing cascode current mirror (transistors M31, M32, M3c, and M3c’) into two complementary currents flowing through transistors M33 and M34. The differential voltage
adjusts the complementary gate voltages
and, therefore, the fractional values of these output currents.
With a very low sub-Hz cut-off frequency being the primary purpose of using this G
m-C integrator in our case, we would like to simply choose the
and
values that minimize the OTA’s transconductance. Basically, it means that both adjustment techniques should reduce the output current flowing in the integrator’s output branch made of transistors M34, M43, and M44. Thus, we should decrease
and increase
as much as possible. However, the OTA becomes more asymmetrical as
and
deviate from
and
, respectively, degrading the integrator’s dynamic range and noise performance. Therefore, the optimal pair of
and
values should be chosen. Since the integrator in [
68] was designed in a 180
CMOS technology from
TSMC®, which differs from targeted
Xfab© technology, and several biasing voltages are also not stated in the paper, we present below the simulations at the schematic level to define all the necessary and missing voltage values and assess the integrator’s performance.
First, DC simulations of the circuit in the open-loop configuration are performed to define proper
and
values. According to
Figure 12a,
is enough to keep the currents
and
approximately equal to a 50
biasing current introduced through a 1:1 current mirror to Mb1 and Mb2 (as well as to maintain M2 and M2c in the subthreshold region). Next, with the current steering tuning off (
⇒
), a constant common voltage
is swept from 0
to
with
varied in a 0.35–0.6
range (see
Figure 12b). For further simulations,
is set to
value, ensuring a correct constant current sunk by M2c’ for any
.
Figure 13 presents the results of AC simulations in the integrator configuration with a common-mode voltage
initially set to
, which is half of the power supply voltage
, as in [
68].
and
are swept from
to
and from
to
, respectively, while biasing voltages
ensure the correct functioning of the output branches.
Figure 13a illustrates the obtained cut-off frequencies
, where only the points corresponding to
,
pairs from
Figure 13b with a DC gain error
below
dB (the arbitrarily chosen value to reduce the non-linearity) are shown. According to the specifications mentioned in
Section 4.1, we require
. Thus, the three best
,
pairs of the
case with the lowest cut-off frequencies are summarized in
Table 7.
The pair with
and
displays a good trade-off between the cut-off frequency and the DC gain error, providing
and
dB. It is used to produce static input–output characteristics shown in
Figure 14a, where the output voltage
is plotted against the “differential” input voltage
for a range of common-mode voltage
values. As seen, the maximum
is limited to ≲
, making it reasonable to switch to
for the sake of higher input symmetry and dynamic range. Although decreasing
leads to a slight increase of
up to 209
, it also results in the reduction of
down to
dB (see
Figure 14b). The results of AC simulations have been reproduced with
, providing three similar
,
pairs with comparatively close performances to those obtained previously with
in terms of
and
, as reflected in
Table 7.
Keeping the same control voltages
and
, we carried out AC and DC simulations with
and
sweep to determine their optimal values.
Figure 15 illustrates the results, where two new characteristics are introduced. A maximum input amplitude
stands for the minimum value between minimum (negative) and maximum (positive) “differential” input voltages that ensure
deviation from ideal unity gain below
dB. We also define a figure of merit that should be maximized:
since we aim to minimize
and
but simultaneously increase the input dynamic range. It is seen that
values
have a negligible impact on either characteristic. Meanwhile, setting
puts us close to an optimum in terms of
.
Table 8 summarizes the chosen biasing and control voltages required for the functioning of the circuit and its performance characteristics. Since our choice of control voltages reduces the transconductance and thus the currents in the output stages of the G
m-C integrator, its estimated power consumption
P, calculated as a product of the sum of currents and the supply voltage, decreases from
to 625
. In the next section, this revised value will serve to estimate the energy spent by the communication chain with the A2F converter.
The hardware implementation of other elements composing the A2F converter is under development. However, unlike the integrator and wavelet generator, these circuits are not critical for the consumption estimation of the communication chain. Hence, we can use their power consumption from the existing state-of-the-art designs for this purpose.
6. Consumption Estimation
In this section, we compare the energetic efficiency of our communication chain to those based on Nyquist and A2I techniques to show the benefits of using the A2F converter in wireless sensors, at least for two explored applications. We estimate the energy consumption of the acquisition systems based on these approaches, followed by the identical low-energy classic transmission system in each case.
So far, to define the relevant extracted features, we trained and evaluated the NN classifiers with the adapted SFS algorithm, which maximizes the classification accuracy for a given limited number of available parallel extractors
. However, as indicated in
Section 2.3, the optimized SFS can additionally take into account the energetic cost of each extracted feature. In binary arrhythmia detection, this algorithm manages to considerably reduce the required energy consumption while maintaining relatively high values of classification metrics, as seen in
Figure 16. Limited to three feature extractors, it achieves a 98.17% accuracy and a 92.61% sensitivity with eight extracted features and
μJ energy consumption (green round marker). Whereas, with the adapted SFS, seven features and a significantly higher energy of
μJ are required for moderately improved accuracy and sensitivity of 98.33% and 94.13%, respectively (green round marker in
Figure 6). Applying the optimized SFS algorithm to the HAR, however, will necessitate the modification of its original evaluation criterion; otherwise, the resulting choice of extracted features leads to a severe limitation of achievable classification accuracy in favor of energy reduction.
Hence, further estimations of energy consumption induced by using the A2F converter in the acquisition chain will be based on the results of optimized SFS with eight extracted features shown in
Figure 16 (green round marker) for arrhythmia detection and of adapted SFS with 16 and 17 features illustrated in
Figure 8a,b (green round markers, yet not showing the energy required for the extraction of chosen features) for HAR. The energetic cost of each extracted feature is calculated as follows:
where
,
,
, and
stand for the power of the amplification stage, the integrator, the wavelet generator, and the ADC, respectively;
is wavelet support, i.e., the duration of a wavelet producing the corresponding feature;
represents a sampling frequency of the ADC. The power equal to
of the state-of-the-art amplification stage from [
62] considered in
Section 4.2 and composed of LNA and PGA is used as
. Up to this point, the G
m-C integrator’s power equal to
has been used to calculate the energetic cost of extracted features (
Figure 6 and
Figure 16). However, we proceed further with an updated value
obtained from the simulations in
Section 5. Next, the estimated power consumption of the digital wavelet generator with clock gating synthesized in
Xfab© CMOS 180
technology [
16] serves as
. SAR ADC, also demonstrated in [
62], provides
and
equal to
and 40
, respectively.
The acquisition chain representing the conventional Nyquist approach considered here is entirely composed of the elements presented in [
62] and operates at
. Alongside the previously mentioned amplification stage and SAR ADC, it involves an anti-aliasing G
m-C type third-order LPF preceding the ADC and consuming
. Thus, its total power consumption is
.
Similar to [
16], for the binary arrhythmia detection application, we also consider the A2I architecture proposed in [
9], designed for the CS acquisition of biological signals. In the case of ECG signals, this A2I converter has been configured to work with 32 channels and 128 sampling cycles in the analysis window, corresponding to a compression ratio of 4 compared to the Nyquist approach. SAR ADCs within each channel provide a 10-bit precision as well. For a sampling frequency
of 2
, the total power consumption of the circuit is
. Nonetheless, this does not account for the power required to recover the original signal from the compressed data.
The wireless transmission system considered for all three approaches uses a Bluetooth low energy (BLE) standard and consumes
per transmitted bit [
71], i.e., 37
per sample with a 10-bit precision.
We can first re-estimate the energy required to extract the relevant features from 10 s of the ECG signal and transmit them from the sensor to the aggregator for further classification, taking into account the updated performance of the binary arrhythmia detection classifier and the reduced power consumption of the G
m-C integrator.
Figure 17a then compares it with the energy necessary for acquiring and transmitting the ECG signal of the same duration but using alternative wireless sensor techniques, i.e., classic (Nyquist) and A2I (CS). The proposed communication chain with the A2F converter, in total, consumes 20.2 and 4.9 times less than those employing classic and A2I approaches, respectively. Whereas the consumption attributed to the transmission process in the A2F converter is 44 times lower than that of the A2I converter, the energy spent in the acquisition chain represents 89.4% of total consumption in the A2F approach, and its value exceeds the acquisition part in the A2I converter by 3.9 times.
Performing similar calculations for the HAR, we obtain the breakdown of energy consumption, as shown in
Figure 17b, induced by processing 10 s of the inertial signals with the Nyquist and A2F approaches. Both cases of the A2F conversion represented as green round markers in
Figure 8—with features extracted from signals of two types (
,
,
) and only from accelerometer signals (
,
,
)—are compared to the classic approach that samples three signals with
and sends them to the aggregator. As observed, employing the A2F converter leads to a substantial decrease in the overall energy consumption of wireless sensors by 4.7 or 5.8 times, owing to the drastic reduction in energy associated with transmission. Since the acquisition part in the A2F approach of both applications remains high and even exceeds that of the classic approach while used for the HAR task, the development of a modified version of the optimized SFS algorithm—a power-aware feature selection based on the complete simulations of the A2F converter’s circuit—is necessary.
So far, we considered sending the extracted features from the sensors for further classification at the aggregator level. However, as indicated in
Section 3.3, we can perform the classification directly within the sensor to diminish the amount of transmitted data further and send only the classification results. For this purpose, it is possible to implement at least a digital architecture of our simple feedforward NNs realized on a field programmable gate array (FPGA) [
72,
73,
74], in an ASIC [
74,
75], or on a microcontroller [
76,
77].
In [
72], a multilayer perceptron with one hidden layer and a 7-6-5 topology was implemented in Xilinx Artix-7
® FPGA. The proposed design consumes
and requires
for classification. Without re-evaluating the data, due to a similarity of the topology with our NNs, we can use these values to estimate the energy spent on processing 10 s of analyzed signals with the classification performed directly within the sensor. While the acquisition part remains unchanged, we spend additional energy due to classification and reduce the consumption attributed to the transmission process. The former is calculated as a product of the required power
, the time necessary for one classification
, and the number of classifications performed in 10 s. In binary arrhythmia detection, instead of sending eight features coded on 10 bits, we transmit only one bit of the classification result, thus reducing by 80 times the energy of transmission. In the multiclass HAR, for both cases (
,
,
;
,
,
), we transmit three bits (to accommodate six classes) per classification rather than 16 or 17 features coded on 10 bits, which results in a 53 or 57 times reduction, respectively. However, as seen in
Figure 18, despite a considerable decrease in transmission energy, the total consumption reduction is negligible, especially in the HAR case. For both applications, the acquisition process now represents more than 98% of the sensor’s total consumption. It means that optimization should be conducted within the acquisition and feature extraction circuitry to cut down substantially on the overall energy usage in sensors.
We can also compare the performance of our system employing the in-sensor classification (without considering the transmission energy) to recent embedded designs for both studied applications. An ECG processor ASIC with arrhythmia detection, proposed in [
78] and implemented in a 65
CMOS technology, consumes
. It locates R-peaks and abnormal R-R intervals by searching for local extremes of the signal derivative with self-adaptive thresholds, achieving a 96.9% classification sensitivity on the MIT-BIH Arrhythmia dataset. The authors improved the classification sensitivity to 98.2% in the ASIC proposed in [
79] and designed for long-term implantable cardiac monitoring. Within the measured total power, which increased to
due to more functions onboard, the detection part consumes only
. A wearable ECG processor for arrhythmia detection presented in [
80] and fabricated in a 110
CMOS technology provides an average classification accuracy of 97.34% with a
total power consumption. It utilizes a Hilbert transform-based R-peak detection, a Haar discrete wavelet transform to extract features, and a hybrid classifier that combines a linear pre-classifier and a polynomial kernel SVM. At the same time, our A2F converter shows a 98.17% accuracy and a 92.62% sensitivity with an estimated average power consumption of
while detecting arrhythmia.
A wearable HAR system designed on the Spartan-6 FPGA in [
81] uses a PCA-based dimensionality reduction technique to choose the relevant features extracted from time and frequency domains and a two-hidden-layer backpropagation NN for classification. However, it was tested using accelerometer data from another dataset, namely PAMAP, achieving an 89.2% accuracy and consuming 268
. A HAR framework implemented on the TI-CC2650 microcontroller unit in [
82] shows 97.7% accuracy in identifying six activities and their transitions in the online training experiment with nine users while consuming
during computation. The fast Fourier transform and discrete wavelet transform features have been extracted from stretch and accelerometer sensors for further inference and training using an NN. The authors followed up in [
83] with the first fully integrated custom hardware accelerator implemented in a 65
TSMC® technology that achieves a 95% accuracy in recognizing eight human activities while consuming 51
of active and 14
of idle power. A deep NN used the extracted features similar to the previous work for classification. In comparison, the proposed A2F converter distinguishes six human activities with an estimated average power consumption equal to
(features from
,
,
) or
(
,
,
) and an 87.7% or 87.2% accuracy.
Thus, for both applications, certain embedded designs offer better energetic efficiency, especially considering the rough consumption estimates made for the A2F converter components. Nevertheless, the advantage of the developed solution lies in its genericity, meaning that it will suit several application cases and remain relatively low-power. Further reduction of energy spent in our acquisition chain can be achieved by employing analog, reconfigurable NNs [
44,
45,
46] based on memristors to digitize the classification result solely. This would also enable learning algorithms such as backpropagation to be implemented on a chip [
43], providing the application or context-specific adaptation in the A2F converter and probable mitigation of design constraints by learning and accommodating nonlinearities introduced by analog circuits.
7. Conclusions and Perspectives
In this study, we demonstrate the benefits of utilizing an A2F converter for event detection in wireless smart sensors in terms of reduced throughput, power consumption, and hardware complexity. For this purpose, a generic and reconfigurable architecture has been proposed, capable of extracting only relevant features from various types of low-frequency signals directly in the analog domain. The extraction of features based on the principle of NUWS is followed by digitization and event classification.
After successfully reproducing the simulation results of classification for already-proposed binary arrhythmia detection using more advanced software, we explored a second application, namely, HAR. Based on the results obtained, we have defined the hardware specifications required for the physical implementation of the converter. After reviewing the available state-of-the-art circuit designs for each principal element constituting the A2F converter and choosing among them the appropriate solutions meeting our specifications, we performed the design and simulation of a Gm-C integrator at the schematic level to achieve a required low cut-off frequency without unnecessary tuning present in the original design.
For both explored applications, we estimated the energy consumed during the acquisition and transmission of the corresponding signals in the wireless sensor’s communication chain, showing the advantages of the developed A2F conversion over alternative acquisition techniques. In upcoming work, we plan to expand the review of state-of-the-art solutions to include other blocks that compose the proposed A2F converter and refine its total consumption. All elements of its architecture are to be designed at the schematic and layout levels using the Cadence® tools. Upon completing all necessary simulations and verifications, we will attempt to develop a modified version of the optimized SFS algorithm. Its power-aware feature selection based on the converter’s circuit simulations is intended to account for its total measured consumption and analog circuit non-idealities. Thereafter, the chip fabrication process will begin, followed by the physical demonstration of the A2F converter’s performance.
A 180 CMOS process was chosen as the technology node for the overall converter’s circuit implementation. However, as intelligent sensors become more prevalent, more digital components tend to be incorporated at the sensor level. Therefore, transitioning to a smaller, more advanced technology node that enables the design of faster, more compact, and power-efficient digital circuits may be reasonable.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}