

Improving Vehicle Heading Angle Accuracy Based on Dual-Antenna GNSS/INS/Barometer Integration Using Adaptive Kalman Filter


Abstract
1. Introduction
- A random sample consensus (RANSAC) method is applied to improve the initial heading angle accuracy and to ensure the initial attitude accuracy of the INS.
- GNSS heading angle obtained by a dual-antenna orientation algorithm is added as a measurement variable in the integrated navigation system based on an adaptive Kalman filter (AKF) in addition to position and velocity. Furthermore, velocity and position errors caused by the lever arm are corrected. The kinematic constraint of zero velocity in the lateral and vertical directions of vehicle movement is used to enhance the accuracy of the measurement model.
- A barometer is added to the traditional GNSS/INS integrated navigation system to enhance the reliability of the system. When none of the GNSS receiver data are available, the barometer and INS data are used to ensure a short-time accuracy.
2. Methodology Design
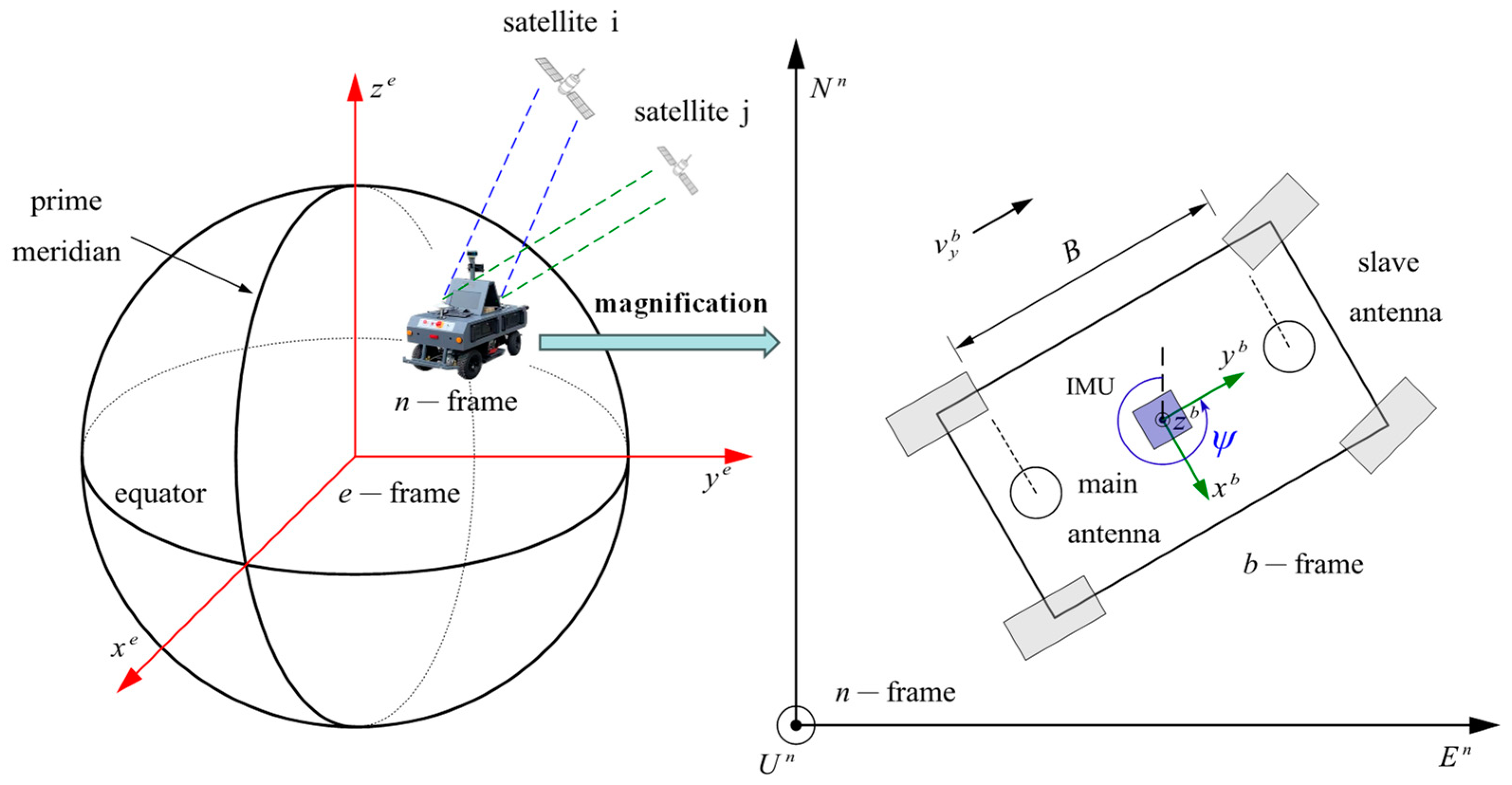
2.1. Reference Coordinate System for Integrated Navigation System
2.2. INS Error-State Model Development
2.2.1. RANSAC Algorithm
2.2.2. INS Error-State Model
2.3. Dual-Antenna Orientation Algorithm
2.4. Measurement Model
2.4.1. Initial Measurement Model
2.4.2. The Lever Arm Correction Algorithm
2.4.3. Corrected Measurement Model Using the Kinematic Constraint
2.4.4. Corrected Measurement Model for Special Scenarios
2.5. AKF Design
3. Experiment and Discussion
3.1. Experiment Platform
3.2. Heading Angle Experiment and Discussion
3.2.1. Open and Occluded Environment Experiment
3.2.2. Experimental Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, L.; Zheng, F.; Gong, X.; Jiang, X. GNSS High-Precision Augmentation for Autonomous Vehicles: Requirements, Solution, and Technical Challenges. Remote Sens. 2023, 15, 1623. [Google Scholar] [CrossRef]
- Xia, X.; Hashemi, E.; Xiong, L.; Khajepour, A.; Xu, N. Autonomous Vehicles Sideslip Angle Estimation: Single Antenna GNSS/IMU Fusion With Observability Analysis. IEEE Internet Things J. 2021, 8, 14845–14859. [Google Scholar] [CrossRef]
- Ding, X.; Wang, Z.; Zhang, L.; Wang, C. Longitudinal Vehicle Speed Estimation for Four-Wheel-Independently-Actuated Electric Vehicles Based on Multi-Sensor Fusion. IEEE Trans. Veh. Technol. 2020, 69, 12797–12806. [Google Scholar] [CrossRef]
- Yang, H.; Hong, J.; Wei, L.; Gong, X.; Xu, X. Collaborative Accurate Vehicle Positioning Based on Global Navigation Satellite System and Vehicle Network Communication. Electronics 2022, 11, 3247. [Google Scholar] [CrossRef]
- Oh, J.; Choi, S.B. Vehicle Roll and Pitch Angle Estimation Using a Cost-Effective Six-Dimensional Inertial Measurement Unit. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2013, 227, 577–590. [Google Scholar] [CrossRef]
- Li, Y.; Zahran, S.; Zhuang, Y.; Gao, Z.; Luo, Y.; He, Z.; Pei, L.; Chen, R.; El-Sheimy, N. IMU/Magnetometer/Barometer/Mass-Flow Sensor Integrated Indoor Quadrotor UAV Localization with Robust Velocity Updates. Remote Sens. 2019, 11, 838. [Google Scholar] [CrossRef]
- Shahian Jahromi, B.; Tulabandhula, T.; Cetin, S. Real-Time Hybrid Multi-Sensor Fusion Framework for Perception in Autonomous Vehicles. Sensors 2019, 19, 4357. [Google Scholar] [CrossRef] [PubMed]
- Yue, Z.; Lian, B.; Tang, C.; Tong, K. A Novel Adaptive Federated Filter for GNSS/INS/VO Integrated Navigation System. Meas. Sci. Technol. 2020, 31, 085102. [Google Scholar] [CrossRef]
- Song, Y.; Nuske, S.; Scherer, S. A Multi-Sensor Fusion MAV State Estimation from Long-Range Stereo, IMU, GPS and Barometric Sensors. Sensors 2016, 17, 11. [Google Scholar] [CrossRef]
- Khaghani, M.; Skaloud, J. Assessment of VDM-Based Autonomous Navigation of a UAV under Operational Conditions. Robot. Auton. Syst. 2018, 106, 152–164. [Google Scholar] [CrossRef]
- Yu, M.; Xue, F.; Ruan, C.; Guo, H. Floor Positioning Method Indoors with Smartphone’s Barometer. Geo-Spat. Inf. Sci. 2019, 22, 138–148. [Google Scholar] [CrossRef]
- Hu, G.; Wang, W.; Zhong, Y.; Gao, B.; Gu, C. A New Direct Filtering Approach to INS/GNSS Integration. Aerosp. Sci. Technol. 2018, 77, 755–764. [Google Scholar] [CrossRef]
- Xia, X.; Xiong, L.; Lu, Y.; Gao, L.; Yu, Z. Vehicle Sideslip Angle Estimation by Fusing Inertial Measurement Unit and Global Navigation Satellite System with Heading Alignment. Mech. Syst. Signal Process. 2021, 150, 107290. [Google Scholar] [CrossRef]
- Chen, C.; Chang, G. Low-Cost GNSS/INS Integration for Enhanced Land Vehicle Performance. Meas. Sci. Technol. 2020, 31, 035009. [Google Scholar] [CrossRef]
- Mostafa, M.Z.; Khater, H.A.; Rizk, M.R.; Bahasan, A.M. A Novel GPS/RAVO/MEMS-INS Smartphone-Sensor-Integrated Method to Enhance USV Navigation Systems during GPS Outages. Meas. Sci. Technol. 2019, 30, 095103. [Google Scholar] [CrossRef]
- Yoon, J.-H.; Peng, H. A Cost-Effective Sideslip Estimation Method Using Velocity Measurements from Two GPS Receivers. IEEE Trans. Veh. Technol. 2014, 63, 2589–2599. [Google Scholar] [CrossRef]
- Bian, H.; Jin, Z.; Tian, W. Study on GPS Attitude Determination System Aided INS Using Adaptive Kalman Filter. Meas. Sci. Technol. 2005, 16, 2072–2079. [Google Scholar] [CrossRef]
- Xia, M.; Sun, P.; Guan, L.; Zhang, Z. Research on Algorithm of Airborne Dual-Antenna GNSS/MINS Integrated Navigation System. Sensors 2023, 23, 1691. [Google Scholar] [CrossRef]
- Selmanaj, D.; Corno, M.; Panzani, G.; Savaresi, S.M. Vehicle Sideslip Estimation: A Kinematic Based Approach. Control. Eng. Pract. 2017, 67, 1–12. [Google Scholar] [CrossRef]
- Yoon, J.-H.; Peng, H. Robust Vehicle Sideslip Angle Estimation through a Disturbance Rejection Filter That Integrates a Magnetometer with GPS. IEEE Trans. Intell. Transport. Syst. 2014, 15, 191–204. [Google Scholar] [CrossRef]
- Laftchiev, E.I.; Lagoa, C.M.; Brennan, S.N. Vehicle Localization Using In-Vehicle Pitch Data and Dynamical Models. IEEE Trans. Intell. Transport. Syst. 2015, 16, 206–220. [Google Scholar] [CrossRef]
- Zhang, C.; Ran, L.; Song, L. Fast alignment of SINS for marching vehicles based on multi-vectors of velocity aided by GPS and odometer. Sensors 2018, 18, 137. [Google Scholar] [CrossRef]
- Dong, P.; Cheng, J.; Liu, L.; Sun, X.; Fan, S. A Heading Angle Estimation Approach for MEMS-INS/GNSS Integration Based on ZHVC and SAUKF. IEEE Access 2019, 7, 154084–154095. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhao, J.; Huang, C.; Li, L. Precise and Robust Sideslip Angle Estimation Based on INS/GNSS Integration Using Invariant Extended Kalman Filter. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023, 237, 1805–1818. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Q.; Niu, X. Estimate the Pitch and Heading Mounting Angles of the IMU for Land Vehicular GNSS/INS Integrated System. IEEE Trans. Intell. Transport. Syst. 2021, 22, 6503–6515. [Google Scholar] [CrossRef]
- Shen, N.; Chen, L.; Chen, R. Multi-Route Fusion Method of GNSS and Accelerometer for Structural Health Monitoring. J. Ind. Inf. Integr. 2023, 32, 100442. [Google Scholar] [CrossRef]
- Kaygısız, B.H.; Şen, B. In-Motion Alignment of a Low-Cost GPS/INS under Large Heading Error. J. Navig. 2015, 68, 355–366. [Google Scholar] [CrossRef]
- Wu, Y.; Wu, M.; Hu, X.; Hu, D. Self-Calibration for Land Navigation Using Inertial Sensors and Odometer: Observability Analy-sis. In AIAA Guidance, Navigation, and Control Conference; American Institute of Aeronautics and Astronautics: Chicago, IL, USA, 2009. [Google Scholar]
- Fischler, M.A.; Bolles, R.C. Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and Automated Cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Niu, X.; Zhang, Q.; Gong, L.; Liu, C.; Zhang, H.; Shi, C.; Wang, J.; Coleman, M. Development and Evaluation of GNSS/INS Data Processing Software for Position and Orientation Systems. Surv. Rev. 2015, 47, 87–98. [Google Scholar] [CrossRef]
- Chang, X.-W.; Yang, X.; Zhou, T. MLAMBDA: A Modified LAMBDA Method for Integer Least-Squares Estimation. J. Geod. 2005, 79, 552–565. [Google Scholar] [CrossRef]
- Zhang, C.; Guo, C.; Zhang, D. Data Fusion Based on Adaptive Interacting Multiple Model for GPS/INS Integrated Navigation System. Appl. Sci. 2018, 8, 1682. [Google Scholar] [CrossRef]
- Cui, B.; Chen, X.; Tang, X.; Huang, H.; Liu, X. Robust Cubature Kalman Filter for GNSS/INS with Missing Observations and Colored Measurement Noise. ISA Trans. 2018, 72, 138–146. [Google Scholar] [CrossRef] [PubMed]
- Boguspayev, N.; Akhmedov, D.; Raskaliyev, A.; Kim, A.; Sukhenko, A. A Comprehensive Review of GNSS/INS Integration Techniques for Land and Air Vehicle Applications. Appl. Sci. 2023, 13, 4819. [Google Scholar] [CrossRef]
- Yin, Z.; Yang, J.; Ma, Y.; Wang, S.; Chai, D.; Cui, H. A Robust Adaptive Extended Kalman Filter Based on an Improved Measurement Noise Covariance Matrix for the Monitoring and Isolation of Abnormal Disturbances in GNSS/INS Vehicle Navigation. Remote Sens. 2023, 15, 4125. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module | Specifications | Performance | |
|---|---|---|---|
| GNSS | Position accuracy (RMS *) | 1.2 m (Plane), 2.5 m (Elevation) | |
| Time accuracy | 10 ns | ||
| Velocity accuracy (RMS) | 0.02 m/s | ||
| Measurement frequency | 5 Hz | ||
| IMU | Gyroscope | Range | ±400°/s |
| Bias stability | 10°/h | ||
| Bias Repeatability | 10°/h | ||
| Measurement frequency | 100 Hz | ||
| Accelerometer | Range | ±5 g | |
| Bias stability | 0.2 mg | ||
| Bias Repeatability | 0.2 mg | ||
| Measurement frequency | 100 Hz | ||
| Barometer | Height accuracy | 10 cm | |
| Measurement frequency | 5 Hz | ||
| Scenario | Method | MAE (°) 1 | MAX (°) 2 | STD (°) 3 | RMS (°) |
|---|---|---|---|---|---|
| the open environment | EKF | 0.6380 | 6.3795 | 0.8500 | 0.8686 |
| AKF without heading angle | 0.4857 | 2.6924 | 0.5956 | 0.6174 | |
| AKF with heading angle | 0.4435 | 1.1489 | 0.3264 | 0.5418 | |
| the occluded environment | GNSS 4 | 2.6789 | 16.3810 | 3.6731 | 3.7129 |
| EKF | 0.7795 | 6.9785 | 1.1874 | 1.2090 | |
| AKF | 0.5048 | 2.9052 | 0.5098 | 0.6367 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiao, H.; Xu, X.; Chen, S.; Guo, N.; Yu, Z. Improving Vehicle Heading Angle Accuracy Based on Dual-Antenna GNSS/INS/Barometer Integration Using Adaptive Kalman Filter. Sensors 2024, 24, 1034. https://doi.org/10.3390/s24031034
Jiao H, Xu X, Chen S, Guo N, Yu Z. Improving Vehicle Heading Angle Accuracy Based on Dual-Antenna GNSS/INS/Barometer Integration Using Adaptive Kalman Filter. Sensors. 2024; 24(3):1034. https://doi.org/10.3390/s24031034
Chicago/Turabian StyleJiao, Hongyuan, Xiangbo Xu, Shao Chen, Ningyan Guo, and Zhibin Yu. 2024. "Improving Vehicle Heading Angle Accuracy Based on Dual-Antenna GNSS/INS/Barometer Integration Using Adaptive Kalman Filter" Sensors 24, no. 3: 1034. https://doi.org/10.3390/s24031034
APA StyleJiao, H., Xu, X., Chen, S., Guo, N., & Yu, Z. (2024). Improving Vehicle Heading Angle Accuracy Based on Dual-Antenna GNSS/INS/Barometer Integration Using Adaptive Kalman Filter. Sensors, 24(3), 1034. https://doi.org/10.3390/s24031034