1. Introduction
The research on 3D reconstruction has always been a challenging goal, serving as a scientific problem and core technology across various fields. Among these, urban area reconstruction involves a broad spectrum of techniques, including point mining and utilizing diverse information sources such as aerial imagery [
1] and street view [
2]. This study reconstructs urban areas using information gathered from OpenStreetMap’s (OSM) data mining tool [
3]. The authors recently introduced an innovative method for reconstructing 3D building maps [
4]. Specifically, this study concentrates on analyzing the shapes of building roofs.
The techniques of 3D model generation are frequently used in a wide range of fields, being applied by mixing different tools and information sources, allowing a good visualization of the environmental elements.
Focusing on the approach related to this paper, in the case of urban areas, the paramount element is the vertex positioning of the buildings, which is the basis for the 3D model visualization. Furthermore, modeling of other aspects like ground elevation, area water flow, representative vegetation, and building face forms can be added to generate the models. All of those details can be scaled by the Level of Detail (LoD) required in the model application [
5,
6], adapting to the computational and economic aspects of the user. The 3D models with only vertex and face composition have the lowest LoD (LoD 1).
Numerous studies use data from OSM. In the work of Girindran et al., multiple open data including OSM are mixed for the foundation of the 3D models [
7]. Alomía et al. made a case study on integrating a procedurally generated road network with the geographic information from OSM into the same model [
8]. The tool of Egea-Lopez et al. generates interactive 3D environments, using data directly from OSM and relying on its integration with the Unity game engine [
9].
Typically, direct manipulation of vertices is unnecessary. Mesh definitions often provide a means to streamline the computational processes, where specified parameters of known defined volumes (such as cylinders, spheres, etc.) can compose these vertices. Using these definitions does not impede the incorporation of optimizations, as outlined in [
10].
To create 3D urban models, the initial prerequisite is the availability of one or more sources of urban information for processing. Various possibilities exist, and a discussion on some of these sources will follow promptly.
In today’s digital landscape, the swiftest means of accessing information online involves harnessing the vast data repositories offered by existing data mining tools, such as Overpass [
3], utilized in this study. These tools streamline data acquisition in diverse formats, including commonly used ones like GeoJSON and GPX. Some standardized data models are generally used to store information, such as CityGML [
6].
Another commonly utilized technique involves gathering information from images, including directly capturing photographs from street views [
2]. While the information obtained may pose challenges for human comprehension, it proves valuable for deep learning techniques.
In a more precise way, specific attributes like the roof shapes examined in this study can be identified. Techniques such as classification using orthophotos [
11], commonly stored in datasets for subsequent analysis, enable the differentiation of various roof forms.
Complex processes involve not only extracting the coordinates of the building’s exterior but also employing automated methods to directly extract roof surfaces. This is achieved through the integration of Light Detection and Ranging (LiDAR) data and multispectral imagery [
12]. By detecting and extracting roof lines from images, forming faces, and estimating their inclinations, these methods streamline the process.
Overall, owing to the diverse specifications of each technique, it is feasible to employ a combination of methods or sources to complement one another, for example, fusing 3D mesh data from unmanned aerial vehicles with a LiDAR point cloud [
13] and integrating a building information model with a real-scene 3D model [
14].
The 3D models obtained are fundamental for different designs with their specific purposes. One of the uses of the results of this work is to simulate radio propagation in 3D space [
15,
16]. The smart cities need the 3D models for significant applications like surveying and mapping [
10]. The creation of a digital twin for digital analysis or research on the buildings needs to be based on 3D models, to be viewable at all levels, for example, for the preservation of historic buildings [
17] and structure health monitoring [
14].
Presently, within the official 3D web viewer of OSM [
18], non-flat roofs are predominantly interpreted as having a gabled shape. This refers to the simplest form with only two inclined roof faces, characterized as a “roof with ridge”. The managed shapes are cone, dome, pyramid, skillion, round, and onion. The 3D model faces are obtained by direct composition of triangles. All the model components of polygon, quadrilateral, cylinder, circle, dome, and pyramid have their functions to create the triangle composition.
The work of Župan et al. [
19] is an example of mixing LiDAR data with OSM, which applies fills to required missing attributes, focused on roof heights and basic shapes distinguished (between flat, pitched, or gabled), including detailed inspection of them with Google Earth, showing results of only automatic procedures and after manual improvement. Finally, a comparison with Google Earth is conducted to assess the outcomes.
There are more possibilities to combine different sources of data. In the work of Qian Zhao et al. [
20], LiDAR data are used with information from topographic map Digital Line Graphics (DLGs), where it has been noticed that DLGs and airborne laser point clouds complement each other in providing comprehensive information on the overall 3D structure of buildings.
Creating LoD 2 models under the CityGML standard is a usual base to work with, like the work of Oniga et al. [
21], made by taking images with an unmanned aircraft system, creating point clouds and generating the model by various steps of classifications, like if a point is on the ground or not, type of point groups (buildings, vegetation, others), segmentation, etc.
Another work of LoD 2 and CityGML is presented by Drešček et al. [
22], who obtained and processed point clouds from unmanned aerial vehicles, including methods to detect patches on the roof faces.
In their paper, B. Xiong et al. leveraged the concept of topology graphs to reconstruct LoD 2 3D building models [
23]. Employing a CSG-style approach, they extracted roof edges from point clouds using a foundational element known as the minimum subgraph. Building primitives were then defined based on this, allowing for the representation of any building through a combination of these primitives and subsequent grouping to create the models.
More aspects can be considered for 3D building model generation, such as building types classified in the work of Park and Guildmann [
24], who used a trained random forest classifier with a LiDAR point cloud as input. That work classifies the building between commercial, residential, skyscraper, and small constructions.
1.1. OpenStreetMap
OpenStreetMap is a collaborative project to create a free and editable world map. Founded in 2004, it is made by volunteers who collect and contribute data about roads, buildings, and other features in their local area. It is a data source and research subject frequently engaged with by the academic community, acknowledging its complex and contextual nature [
25].
The resultant map is available for free use and download, offering an alternative to conventional proprietary maps. OSM employs a topological data structure, with four core elements (also known as data primitives):
Nodes are points with a geographic position, stored as coordinates (pairs of numbers, a latitude, and a longitude) according to World Geodetic System (WGS) 84.
Ways consist of ordered lists of nodes, representing a polyline, or potentially a polygon if they constitute a closed loop. They serve the purpose of representing both linear features, such as streets and rivers, and areas, including forests, parks, parking zones, and lakes.
Relations are ordered lists of nodes, ways, and relations (together called “members”), where each member can optionally have a “role” (a string). Relations are used to represent the relationship of existing nodes and ways.
Tags are key–value pairs (both arbitrary strings). They are used to store metadata about the map objects (such as their type, their name, and their physical properties). Tags are not independent entities; instead, they are invariably associated with an object, be it a node, a way, or a relation.
The buildings are the key elements in this work, where each building is a way or relation of 2D coordinates (way for buildings with single-polygon geometry and relation for composition); any other detail like building height is noted as tags attached, and the most important of them in this work are tagged “roof:shape”.
1.2. Hypothesis
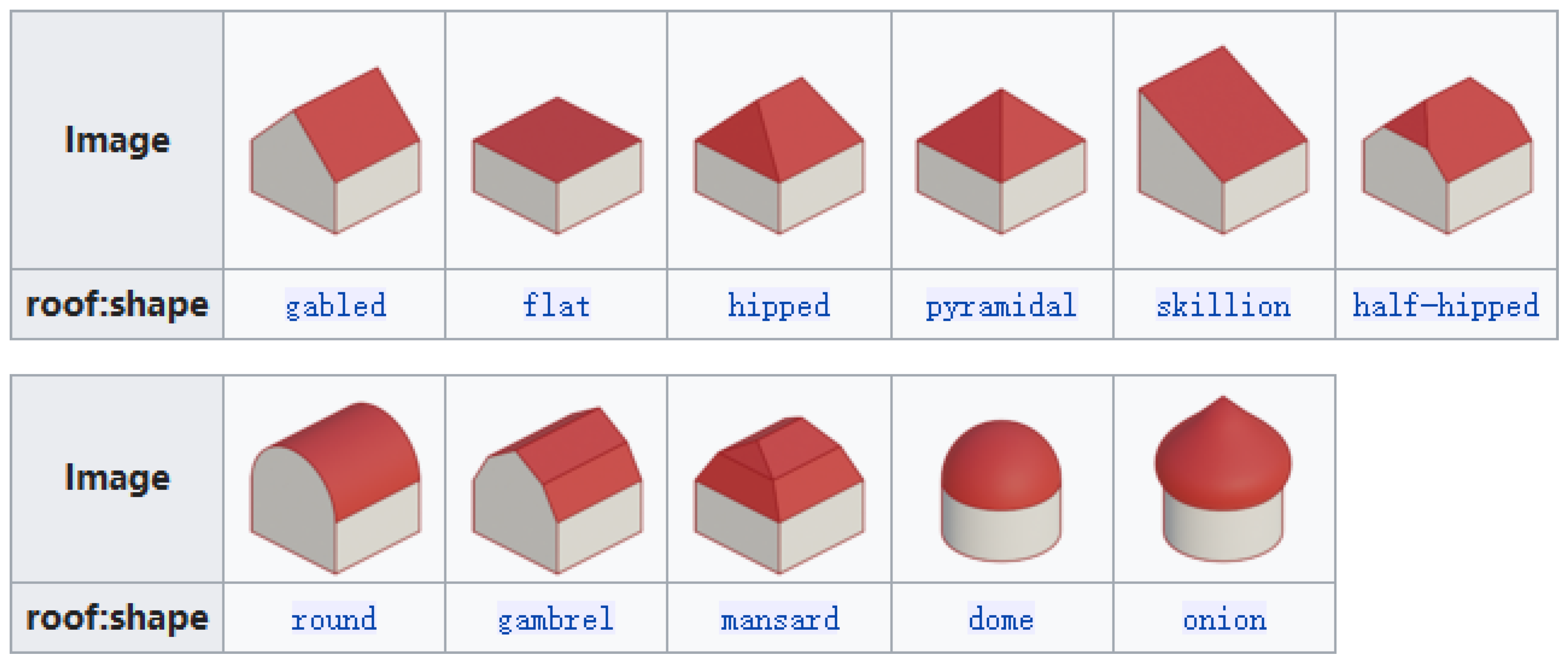
This paper proposes a method to add the roofs to polyhedral 3D building models, applicable to buildings with any
node geometry and any well-defined shape of roof (shown in
Figure 1), including some estimation ideas for missing information. Progressively, the following questions will be reviewed in this research:
Whether a method that uses exclusively OSM information can be created to add the roofs to 3D building models.
Whether the method can sustain its functionality under certain deviations in the given information.
Whether the method can sustain its functionality for high-complexity inputs, like buildings with too many sides and buildings with holes.
Whether the names of shapes of the building roofs can always be distinguishable in the method results.
Whether the output models can achieve considerable similarity to the actual buildings.
The remainder of this paper is structured as follows:
Section 2 provides a comprehensive explanation of the methods employed for reconstructing 3D roofs, particularly focusing on scenarios where roofs possess well-defined shapes. This section is subdivided to address buildings delineated by rectangular and non-rectangular 2D ground coordinates. It elucidates the integration of these methodologies within the overarching process for generating 3D building models.
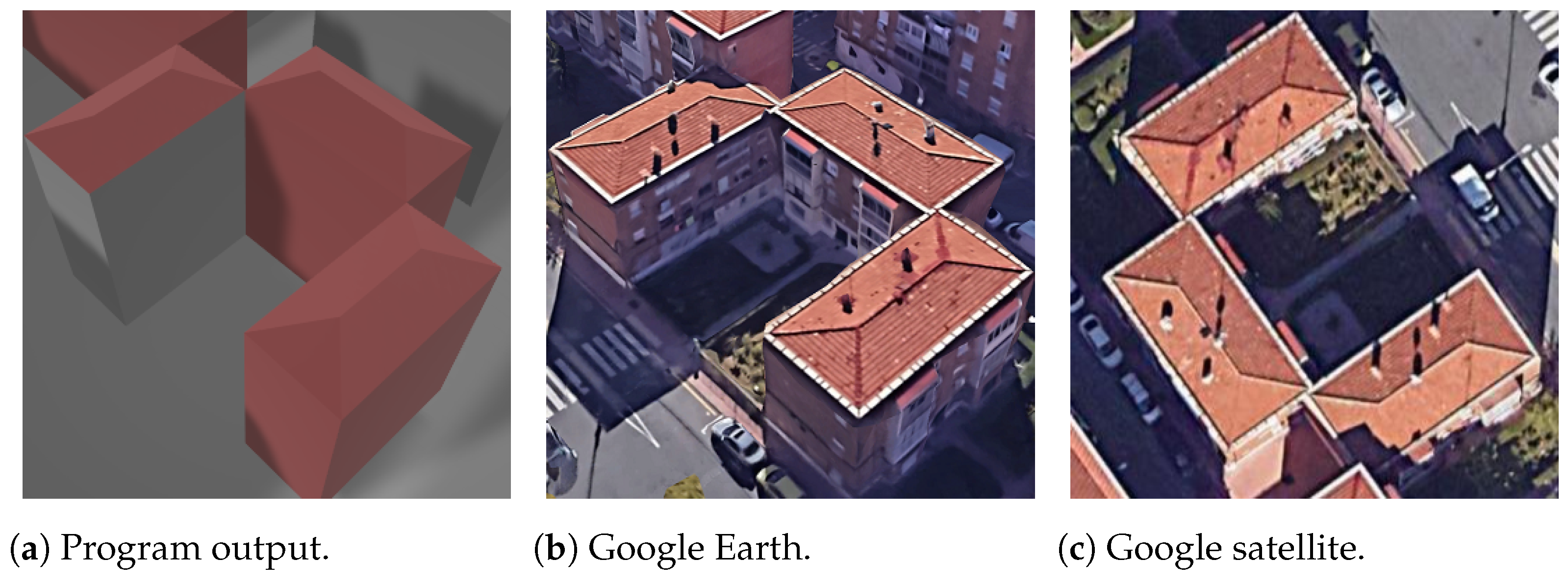
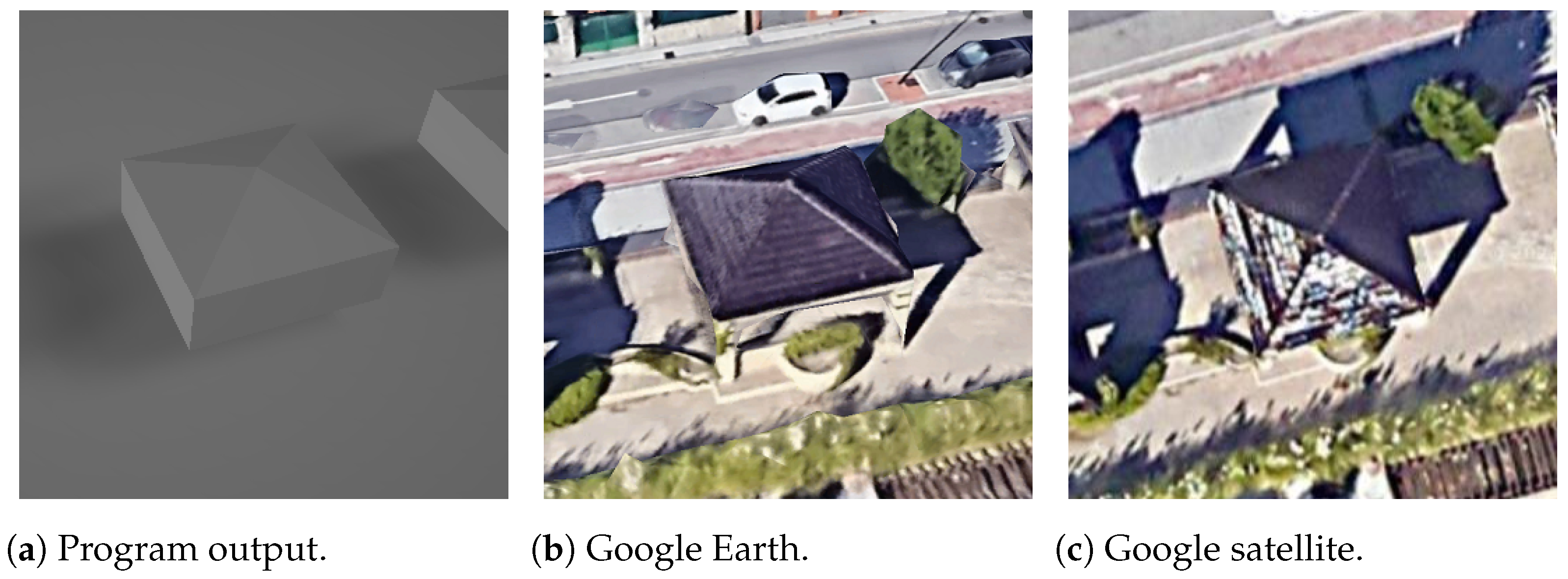
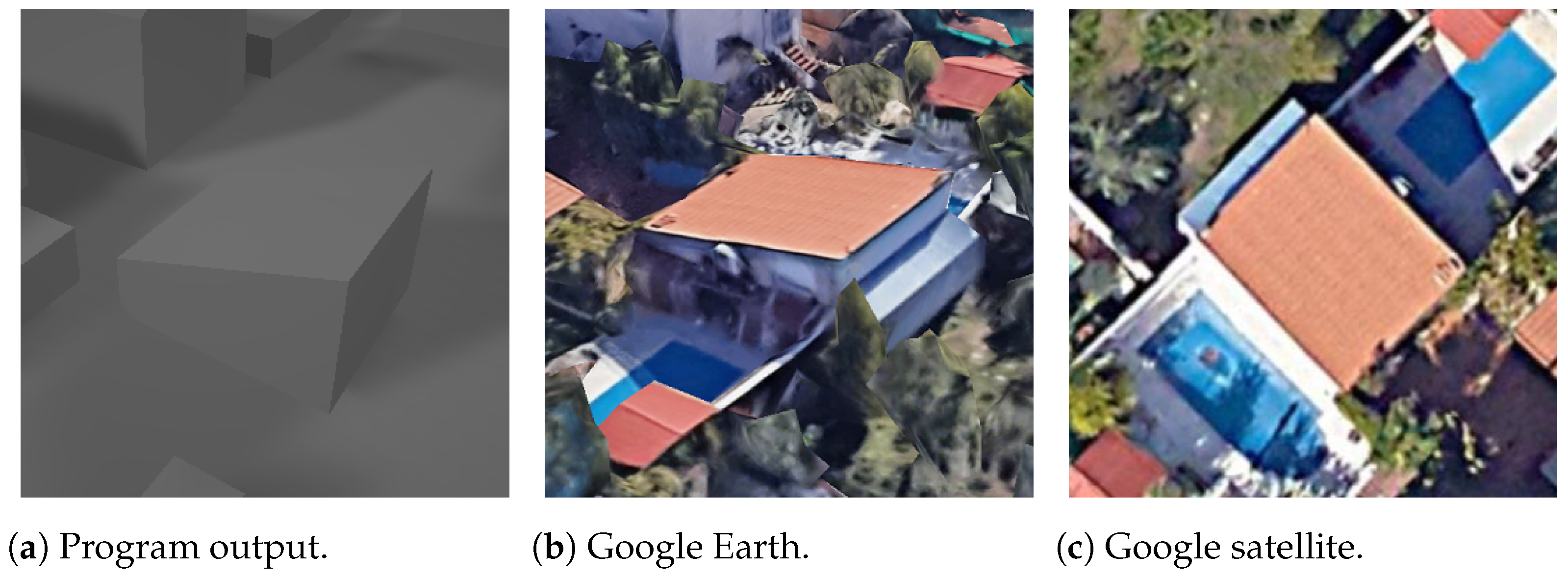
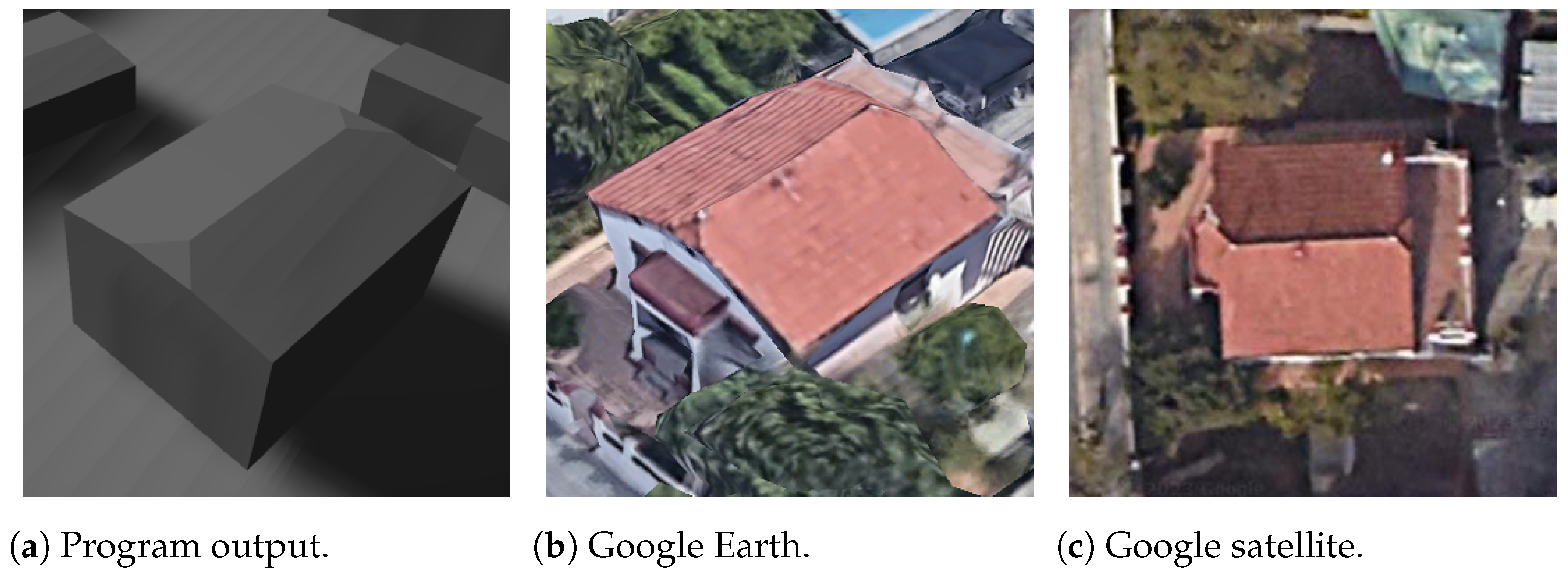
Section 3 presents the outcomes yielded by these methodologies, juxtaposed against outputs generated by online services offering analogous functionalities.
Section 4 synthesizes the accomplishments outlined in this paper. Finally,
Section 5 outlines potential avenues for future research and development.
2. Materials and Methods
In this section, the method used to generate the 3D models is described in detail, where the following information from OSM is used:
Two-dimensional coordinates of their body.
Name of roof shape, with possible subparameters.
Total height of the building.
Height of the roof part (without the body).
For the 3D modeling, the distance unit must be the same for all the dimensions, and in OSM, the heights are in meters, but the coordinates are in latitudes and longitudes (“WGS84” coordinate system). The solution to this problem is a conversion of the coordinates to the “EPSG:4326” system, which uses meters as a geographic unit; the conversion can be made easily using the tool of
PROJ version 2.8.0 [
27].
The algorithms used for roof reconstruction are described separately in full mathematical descriptions and programming considerations. This work adds more details to the theory applied to reconstruct the buildings in the previous research [
28].
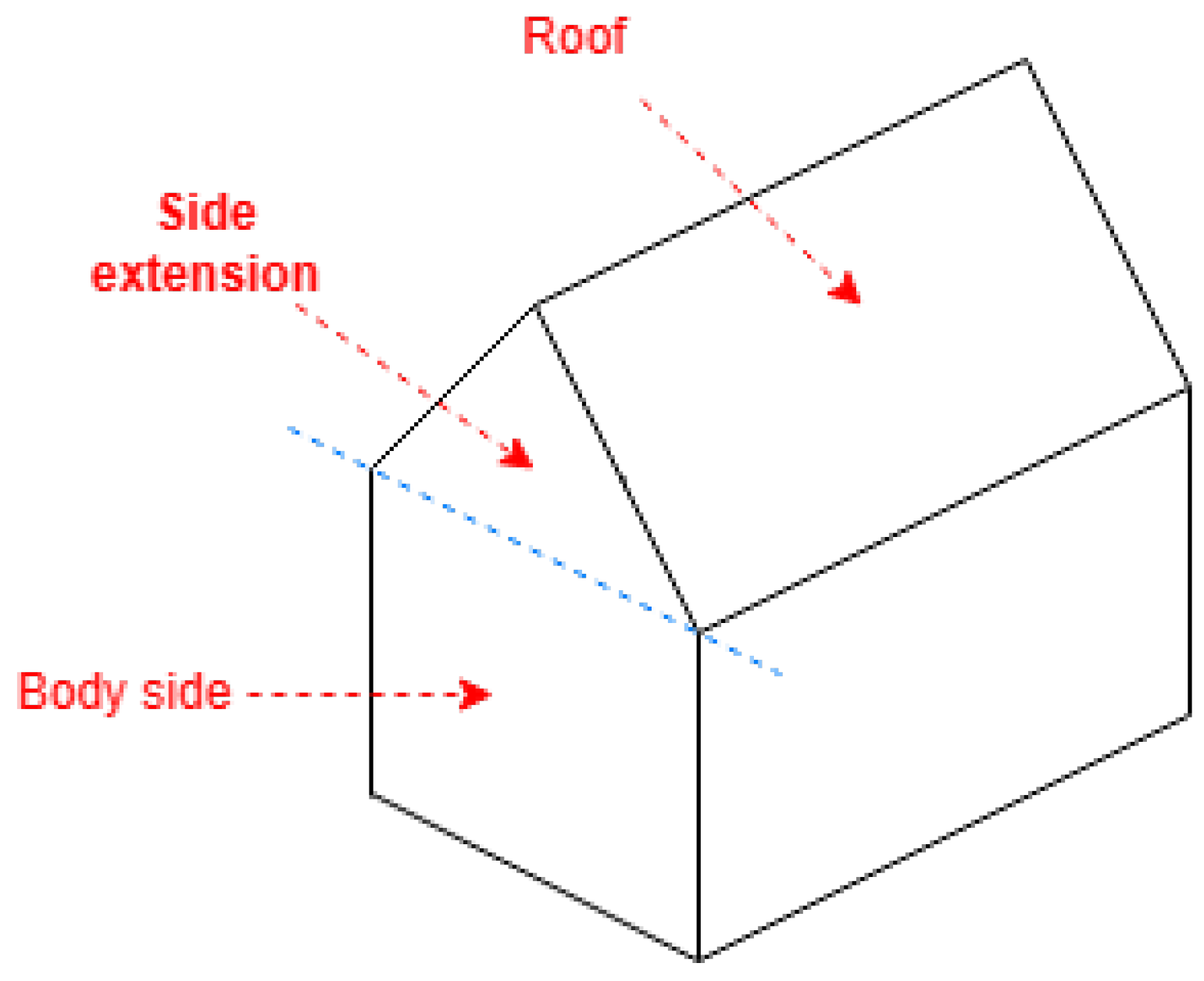
These algorithms result in 3D models with the faces distinguished between roof and side faces as in
Figure 2. This distinction facilitates the assignment of distinct attributes, such as the color of the building, to these respective faces.
The descriptions commence with the most straightforward algorithms designed for buildings with simple rectangular footprints. Subsequently, more intricate algorithms tailored for complex footprints are presented. Additionally, supplementary programming enhancements are explained. Finally, a concise overview of the run-time steps of the ultimate program is provided.
2.1. Mathematical Description for Buildings with Simple Rectangle Footprint
A building footprint is considered a simple rectangle that exhibits precisely four exterior sides, with edge angles close to 90º (typically, in the given information, the coordinates are not perfectly perpendicular) and without interior holes.
In the previous research by the same authors [
28], the method used to reconstruct the buildings was adapted to be valid for any footprint. This work will process independently these buildings with a simple footprint with an easier theory.
The heights for different vertices on the roof are derived using the heights provided in the OSM information. This process is analogous to the approach outlined in Equation (
1) for all buildings with rectangular footprints. However, various roof shapes may need different height calculations.
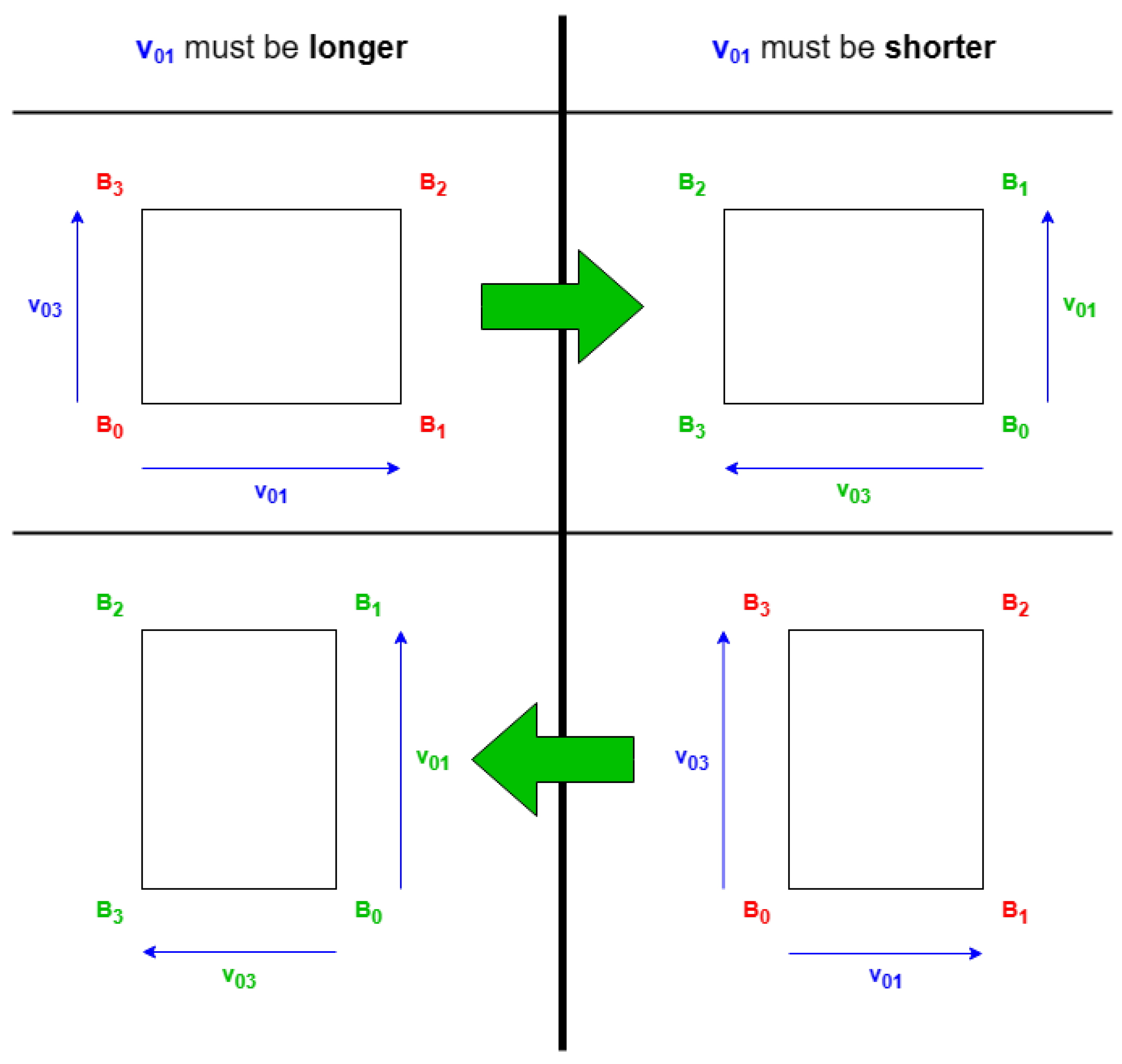
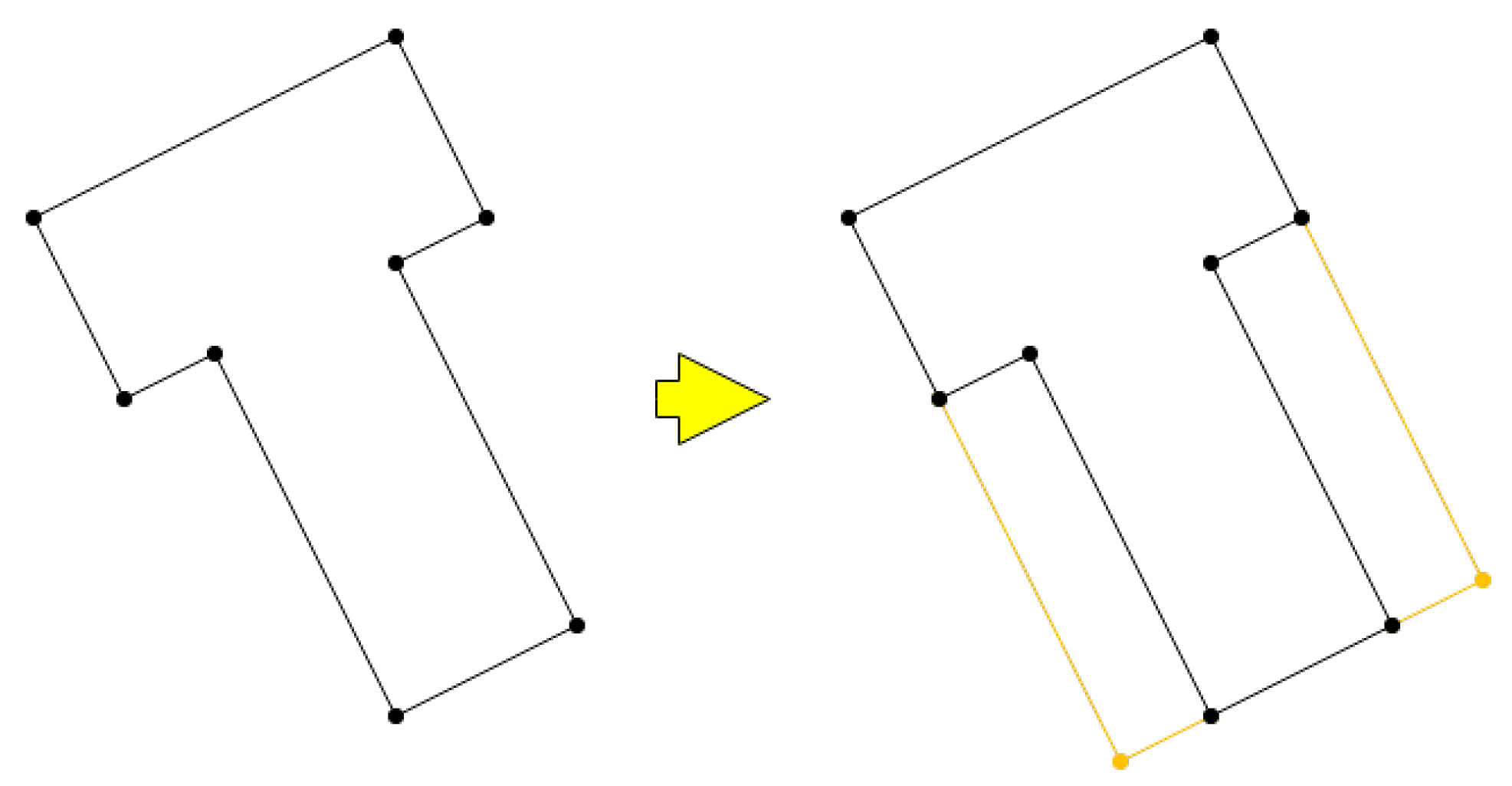
The following algorithms locate most of the upper coordinates on the roof near the first side (between the first two coordinates) and its corresponding opposite side. To meet the concept of roof shapes, these algorithms require that the first side be one of either the shorter or the longer sides, contingent upon the shape and probable properties. To satisfy this, if the provided coordinates are not arranged in a manner that conforms to this requirement, a positional shift can be performed on the coordinates. This shift involves treating the first point as the last and the second as the first (see
Figure 3).
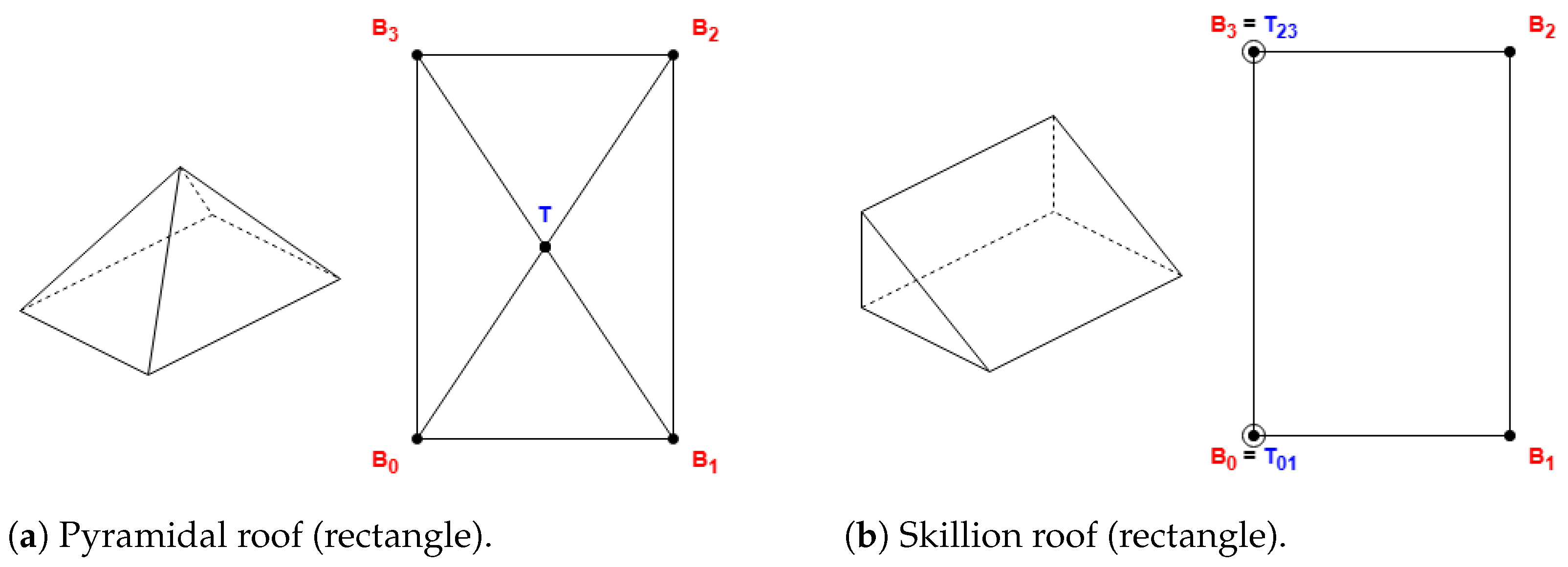
2.1.1. Roof Shapes That Do Not Need Side Length Comparison
Some roof shapes do not require a comparison of side lengths, as the skillion shape displayed in
Figure 4, with the definitions in
Table 1.
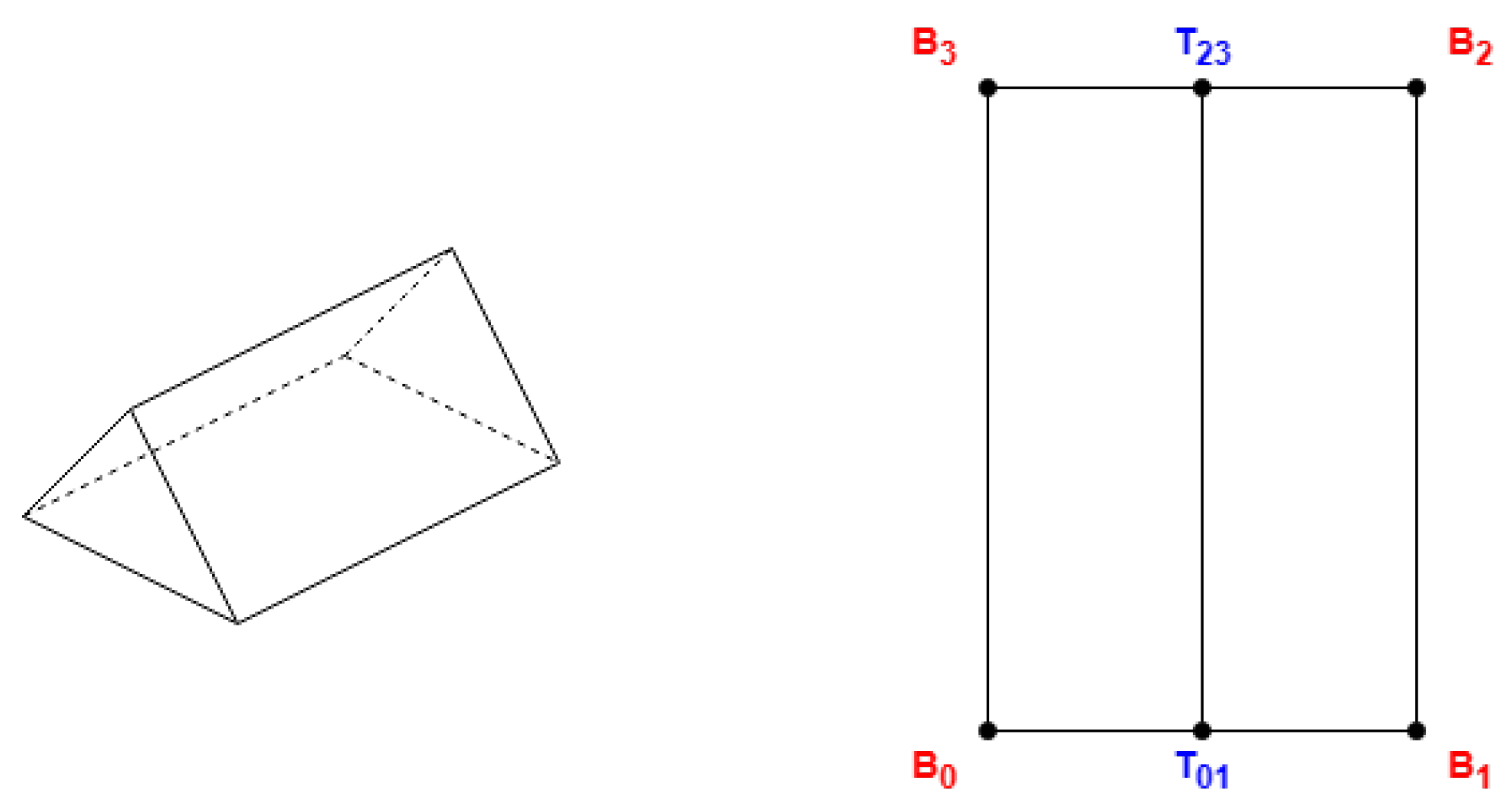
In
Table 1, the points
represent XY coordinates for the base points given in OSM coordinates, being the body side of the building. The points
T and
are the top points, with only XY coordinates. A dot over an uppercase letter means a 3D point with the same XY coordinates as the corresponding 2D point and the proper height of the base (for
) or top (for
T or
) up to Equation (
1).
The buildings with skillion roofs may have a “direction” parameter: the angle degree from the lower side to the higher. However, in most cases, this information is missing. In most of the examples found where the direction parameter was not given, the second side () is the lower, and the last side () is the upper.
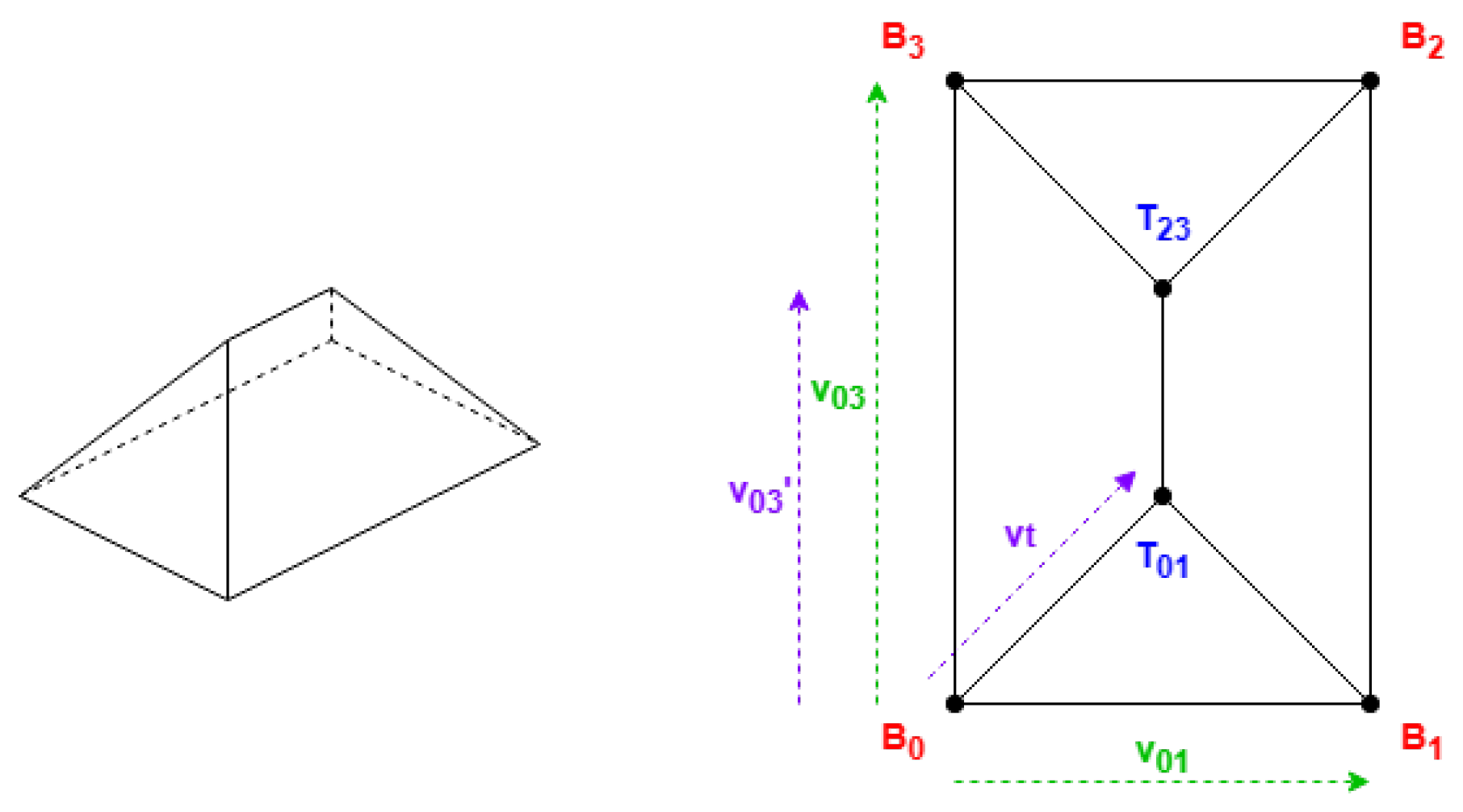
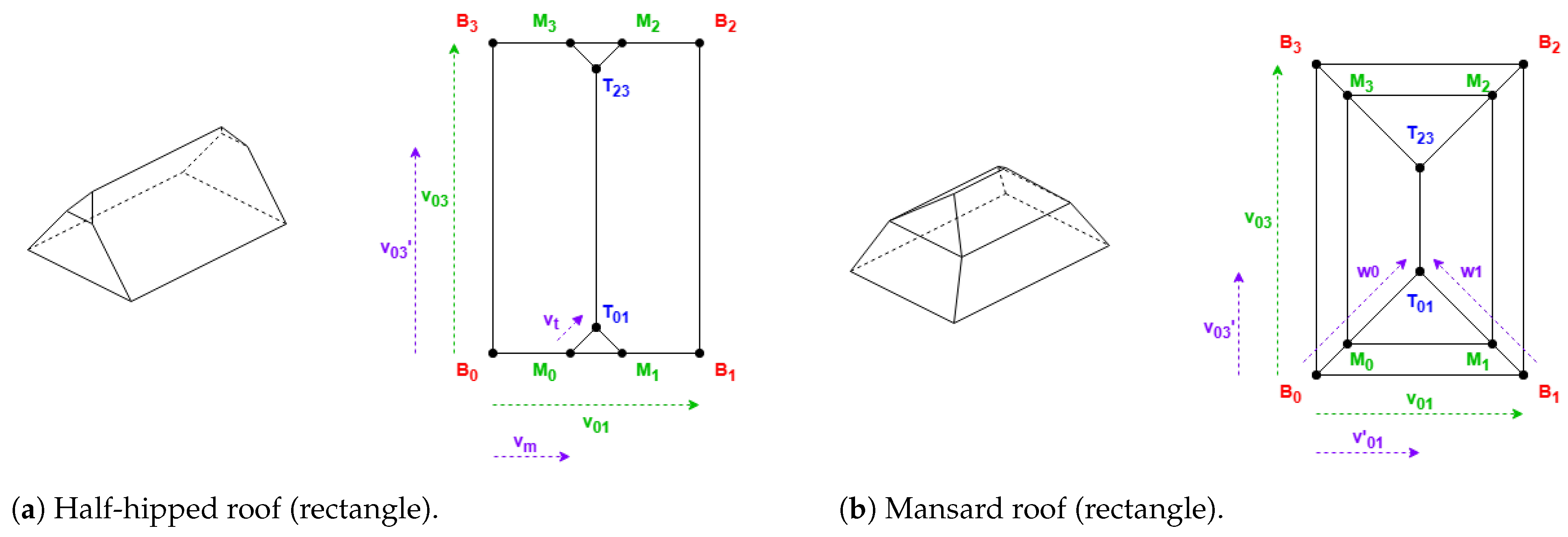
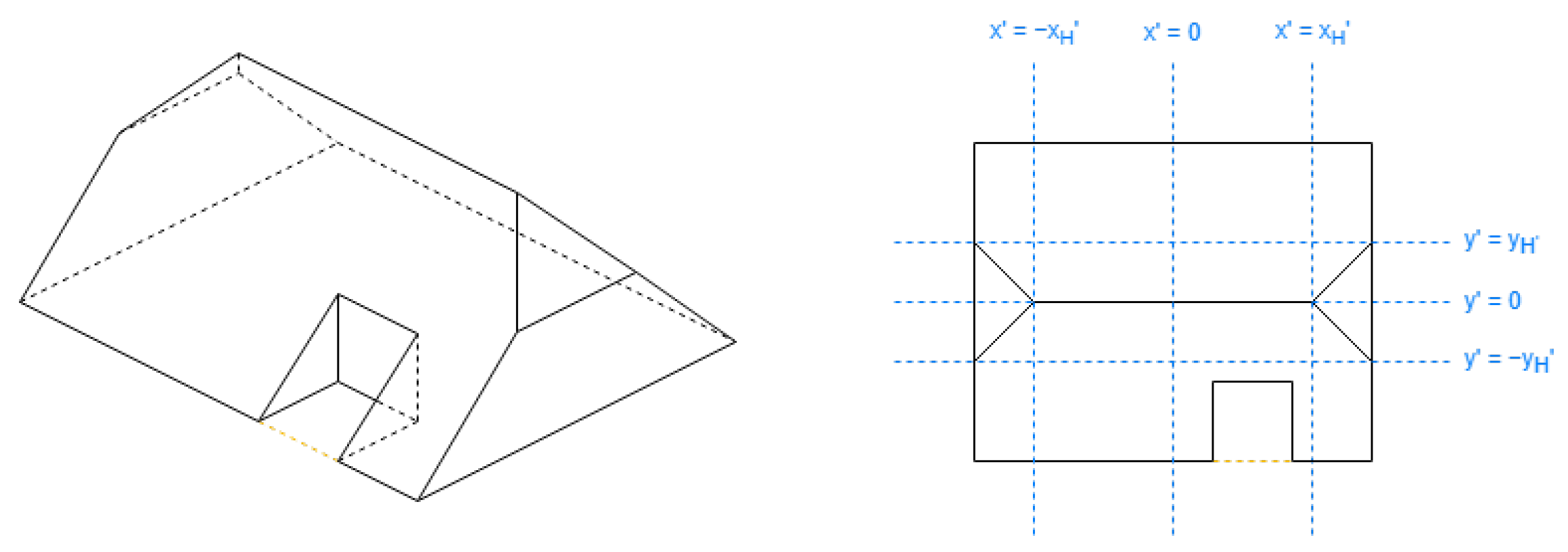
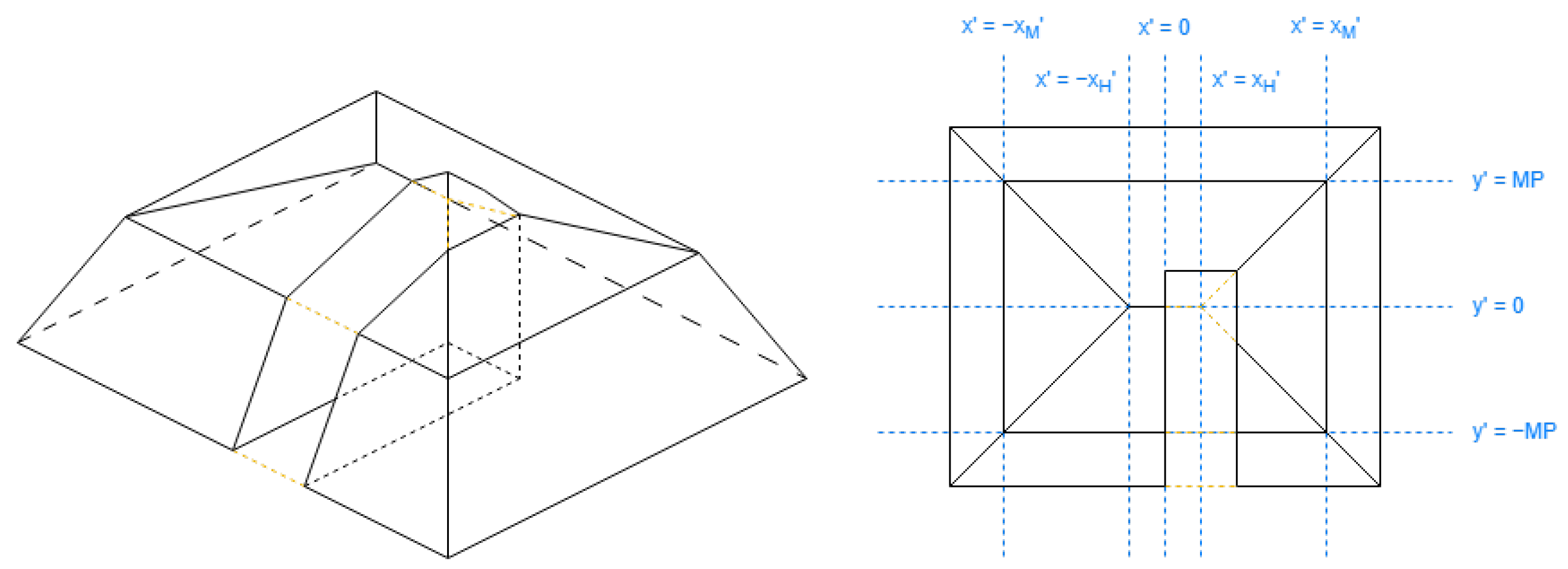
2.1.2. Roof Shapes That Always Require the First Side to Be Shorter
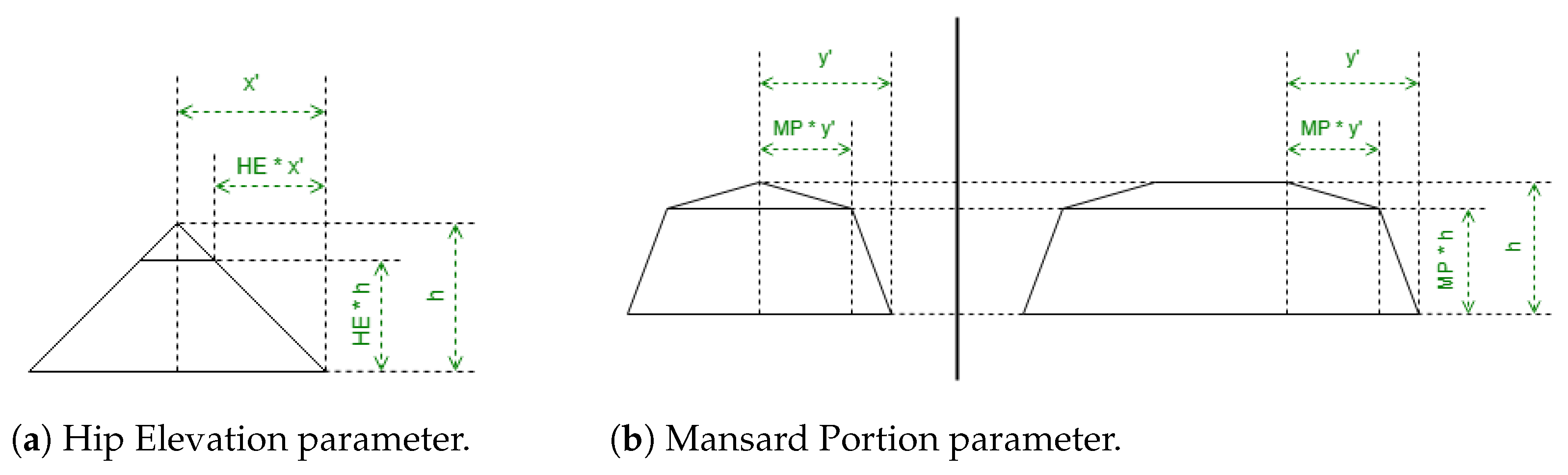
In
Table 2, there are used the parameters Hip Elevation (HE) and Mansard Portion (MP); these are algorithm parameters defined for the half-hipped and mansard shapes, respectively. Their visualizations are displayed in
Figure 7.
HE determines the height fraction of hips on the shorter sides to be elevated. Its value must be between 0 and 1, typically greater than 0.5. When HE is equal to 0, the result will be a hipped roof; when HE is equal to 1, the result will be equal to a gabled “along” roof. The recommended value is 0.7.
MP determines the length fraction in the coordinates where the raised edge should be situated on all the hips. Its value must be between 0.5 and 1. When MP is equal to 0.5, the result will be a hipped roof; when MP is equal to 1, the result will be equal to a flat roof. The recommended value is 0.7.
There are also some points
in
Table 2 representing vertices with middle height; the height for these vertices is obtained by Equation (
2):
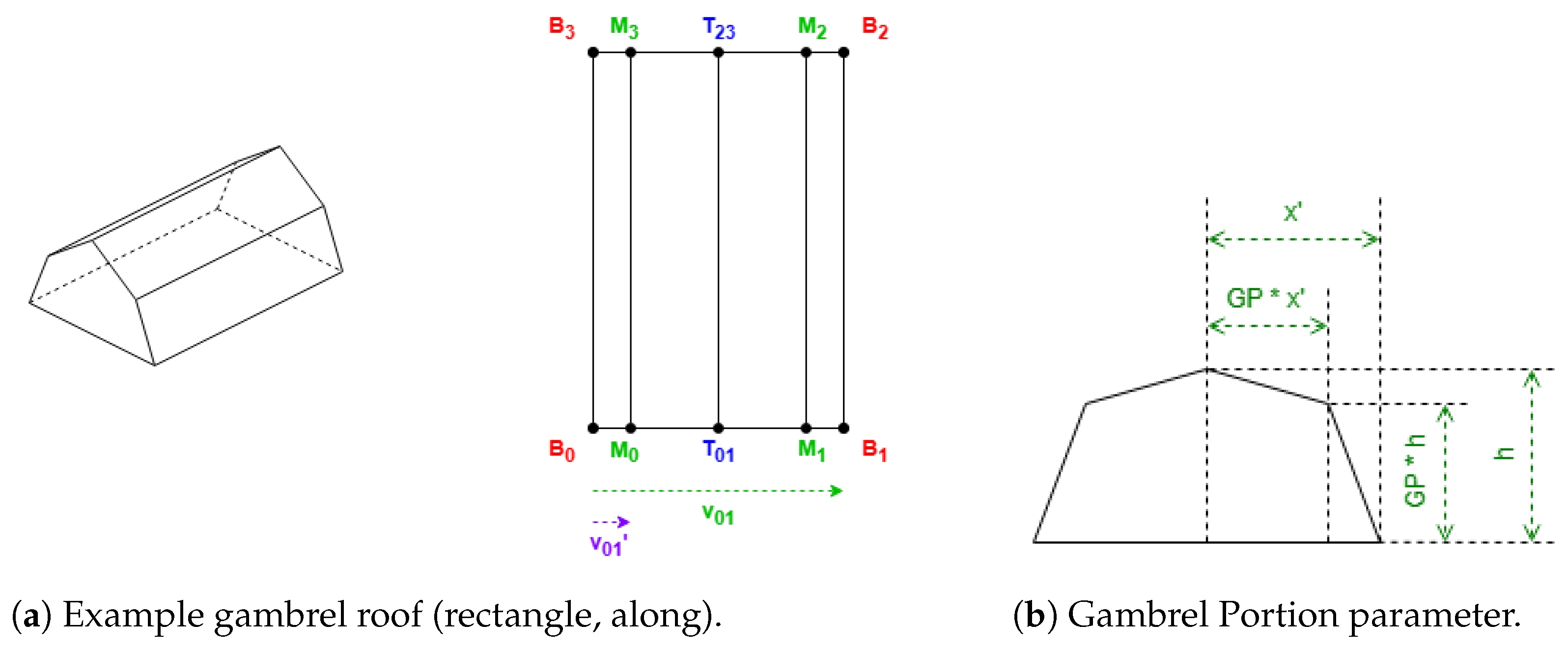
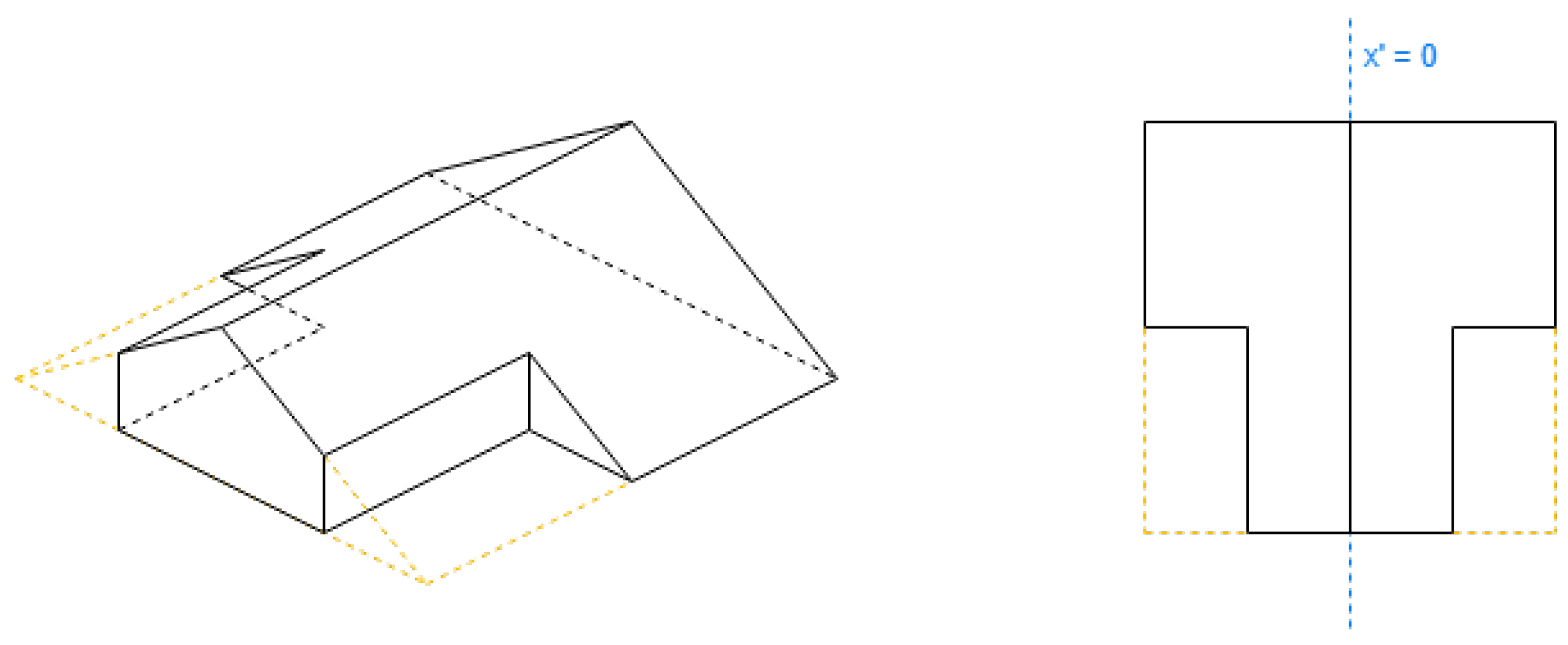
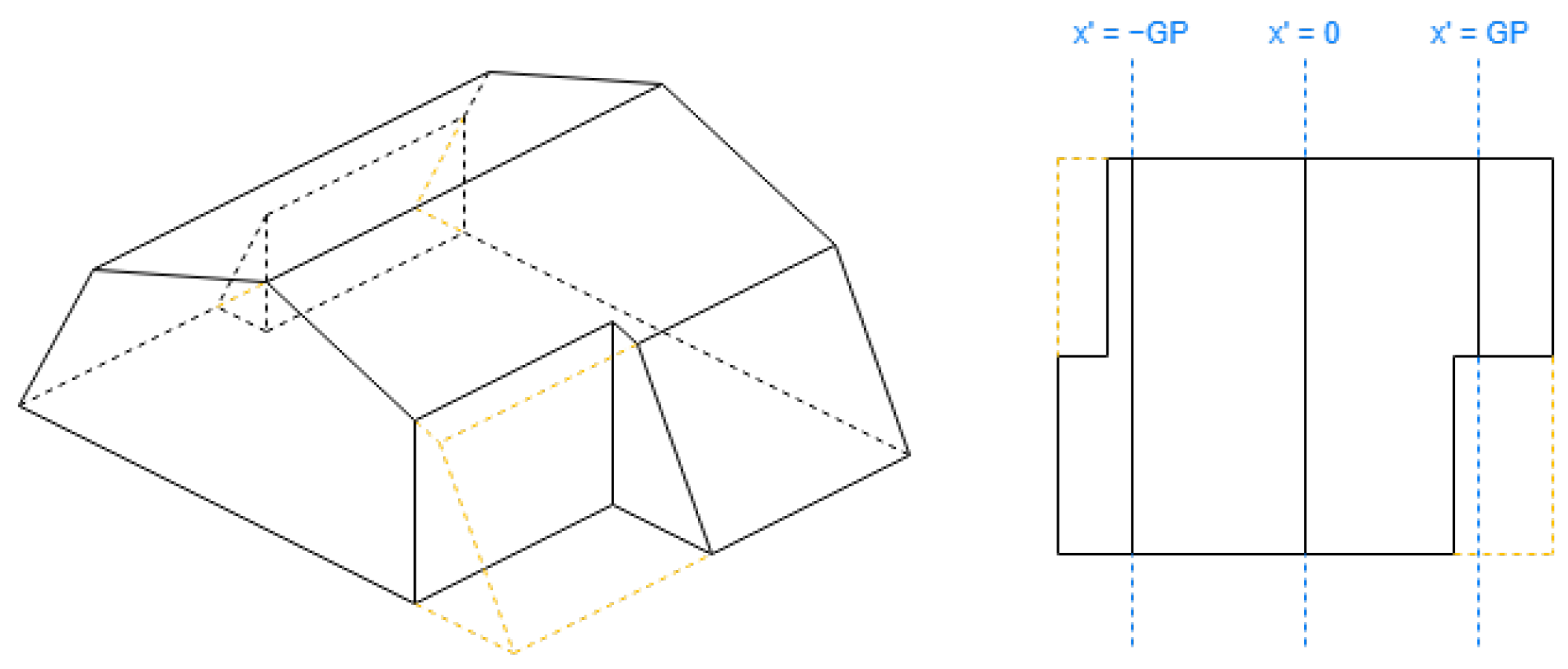
2.1.3. Roof Shapes That Depend on an OSM Parameter
These roof shapes in
Figure 8 and
Figure 9a have a property “orientation”. Its value can be “along” or “across”. When it is “along”, the algorithm requires the first side to be shorter, and when it is “across” to be longer.
An algorithm parameter Gambrel Portion (GP) is used for the gambrel roof (
Figure 9b), which determines the length fraction in the coordinates where the raised edge should be situated on both hips. Its value must be between 0.5 and 1. When GP is equal to 0.5, the result will be equal to a gabled roof; when GP is equal to 1, the result will be equal to a flat roof. The recommended value is 0.7.
The gambrel roof also has vertices with middle height, obtained by Equation (
3):
When the “orientation” property is not given, the default value will be “along” for gabled roofs and “across” for gambrel. The rest of the definitions of the roof shapes in
Figure 8 and
Figure 9 are obtained in
Table 3.
2.1.4. Example
This theoretical example uses simple values, but the real numbers in practice can have many more integers and floating digits:
Corners: .
Total height: 10.
Roof height: 2.
Shape: gambrel.
Orientation: along.
First, check the side length requirement, where a gambrel along roof requires the first side to be the shortest.
If the requirement is not accomplished, apply a position shift on
Obtain the 2D coordinates for all the points following the algorithm:
Finally, obtain and assign the heights to the points:
2.2. Programming Details for Buildings with Rectangle Footprint
All the 3D models are defined by triangulation with their normal vector. In the previous algorithms, the normal vectors of any shape always depend on the ordering of the points following the right-hand rule, in other words, in counterclockwise order from the top view.
Some improvements are applied exclusively for programming the preview algorithms.
Most of the triangulation of the polygons is made by the Node library
earcut [
29]. Specifically, in the case of the quadrilateral roof faces, they can be considered directly as two triangles of
and
because they can never contain reflex angles, and the
earcut library cannot triangulate the side faces due to its implementation based on two dimensions.
Some roof shapes have similar aspects to take into account when coding the algorithms:
For the roof shapes gabled, hipped, and skillion, the upper part of the building has four faces with the same point names. So, those faces can be built with the same function, then differ between roof and side extension faces for each shape.
Similarly, for the roof shapes half-hipped, gambrel, and mansard, there are eight faces instead, also sharing the point names. Multiple triangles or quadrilaterals can replace the polygons with more sides, maintaining the size of 3D render content (number of vertices and triangles). Following this aspect, the roof faces for these three shapes can be built using the definition for mansard roofs in
Table 2.
The footprints are not required to be perfectly perpendicular to qualify as rectangular. To be classified as a rectangle, the scalar product of the unitary vector of two connected sides must have an absolute value less than or equal to 0.01.
2.3. Mathematical Description for Buildings with No Rectangle Footprint
The applied technique involves determining the smallest rectangle area containing all the base coordinates, treating it as a virtual rectangle roof (see
Figure 10). All coordinates are then assigned the same height as the corresponding point on this virtual roof.
The 2D coordinates of each roof face depend on the footprint coordinates and on the virtual faces. Existing efficient algorithms for 2D polygons’ intersection or difference [
30] can be used in their obtaining processes.
The heights are obtained by finding the formula to translate the coordinates of each building to one or more alternative translated coordinates, then calculating the height by using this alternative value in the specific descending level function (DLF) defined for each shape of the roof.
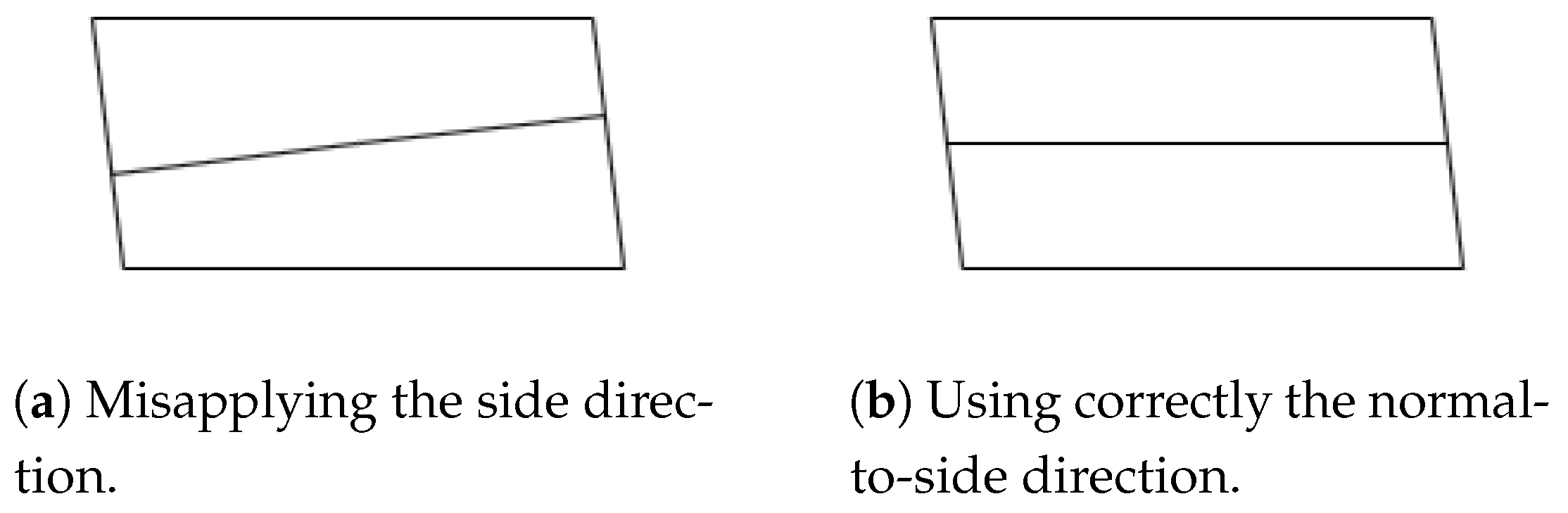
2.3.1. Alternative Translated Coordinates
First, the alternative coordinates should have their axis parallel to the longest or second longest direction of sides of the building, also referred to as the primary or secondary side direction.
These directions are chosen between the vector orientations of the outer ring of the footprint coordinates. The vectors can be grouped if their directions are identical or opposite. Their behavior will be the same. Considering possible deviations in the given information, the grouping of two vectors is evaluated by whether the scalar product of their unitary vector is more than or less than .
In each group, the next step is to sum or subtract the length of each vector in the same order as the coordinates, depending on whether the directions are opposite or not, storing the maximum and minimum values in the steps of the cumulative sum. The difference between those values is the length of this direction.
The values in the alternative coordinates need the following properties:
Proportional with the distance to the alternative axis.
Within [−1, 1], required by the DLFs.
For the first property, the alternative value is obtained by the value of a scalar product of the position vector between points of each original coordinate and the normal vector to the alternative axis.
Then, with the maximum and minimum in the previous values, we reflect them to the range of [−1, 1].
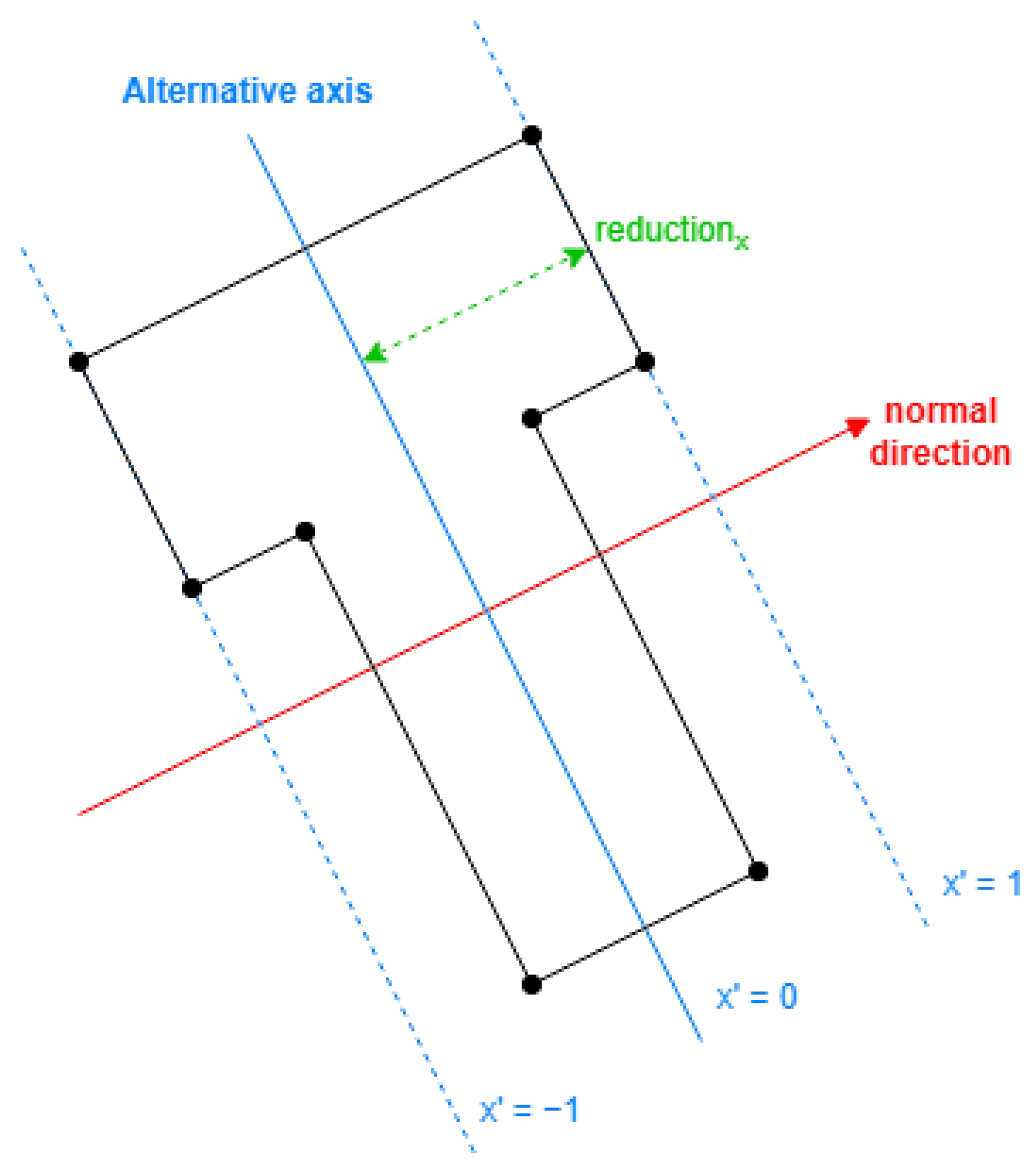
In conclusion, to translate a coordinate, the normal vector to the alternative axis and the following parameters are required considering all the exterior original coordinates:
The maximum and minimum of the alternative value are computed on a set with all exterior points
. With it, the alternative value for any point
is obtained by
As displayed in
Figure 11, the normal direction is selected first, then the parameters can be obtained with Equation (
4). The resulting definition will reflect the coordinates using Equation (
5).
In this document, when the double alternative axis is required, the coordinate will always be longer than . The coordinate will be based on the secondary side direction, where the alternative axis is parallel to it, having a bigger value in the reduction parameter. Furthermore, will be based on the primary.
2.3.2. Alternative Face Positions
By employing two alternative coordinates, the coordinate translation can be reverted. For each roof shape, there exist specific static alternative 2D positions that facilitate the construction of roof faces. These positions can be reversed and translated back to the actual coordinates.
For example, given two alternative coordinates:
To obtain a point which requires the alternative values
, we use a simple linear equation system with two unknowns:
Furthermore, the point will be defined by values .
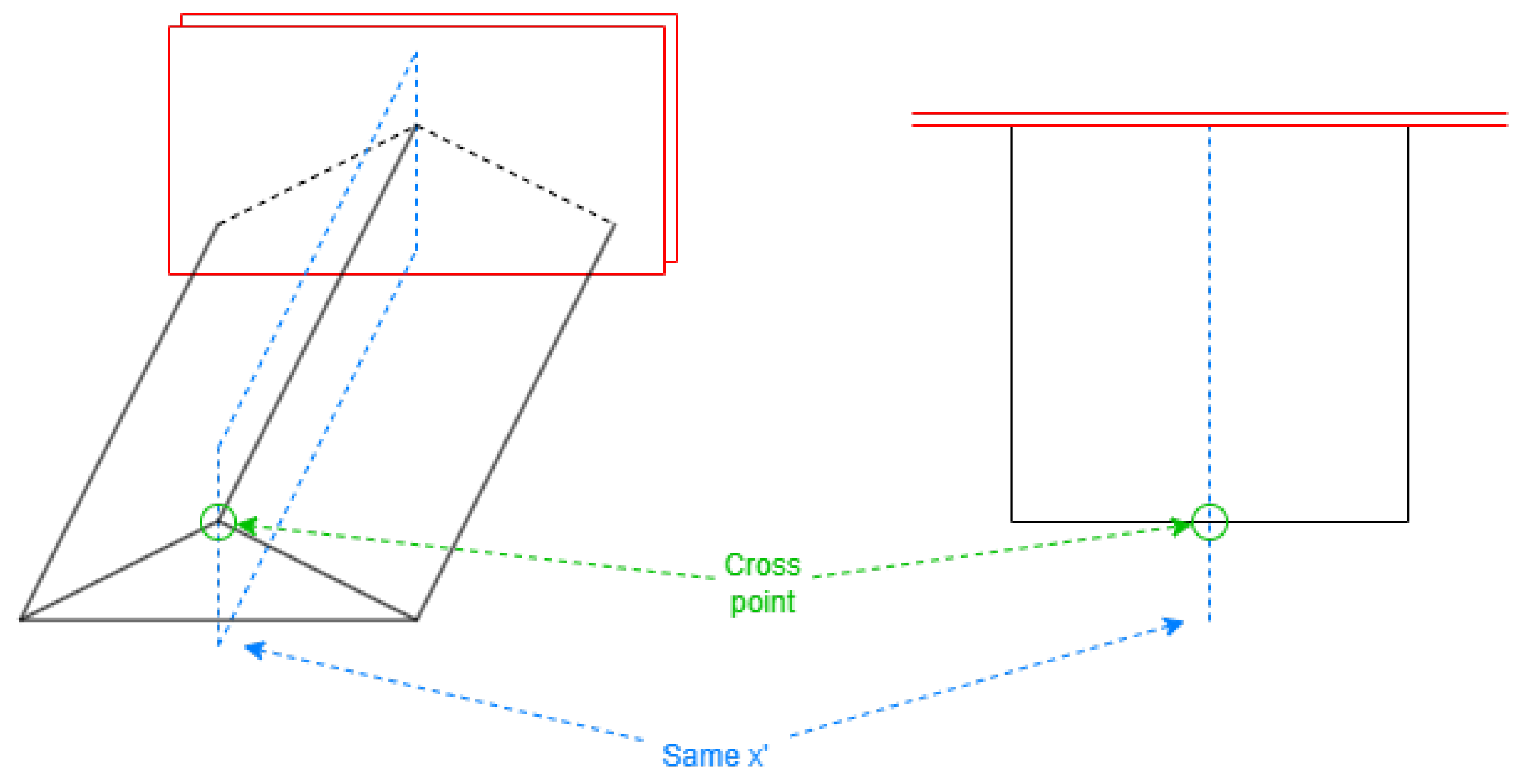
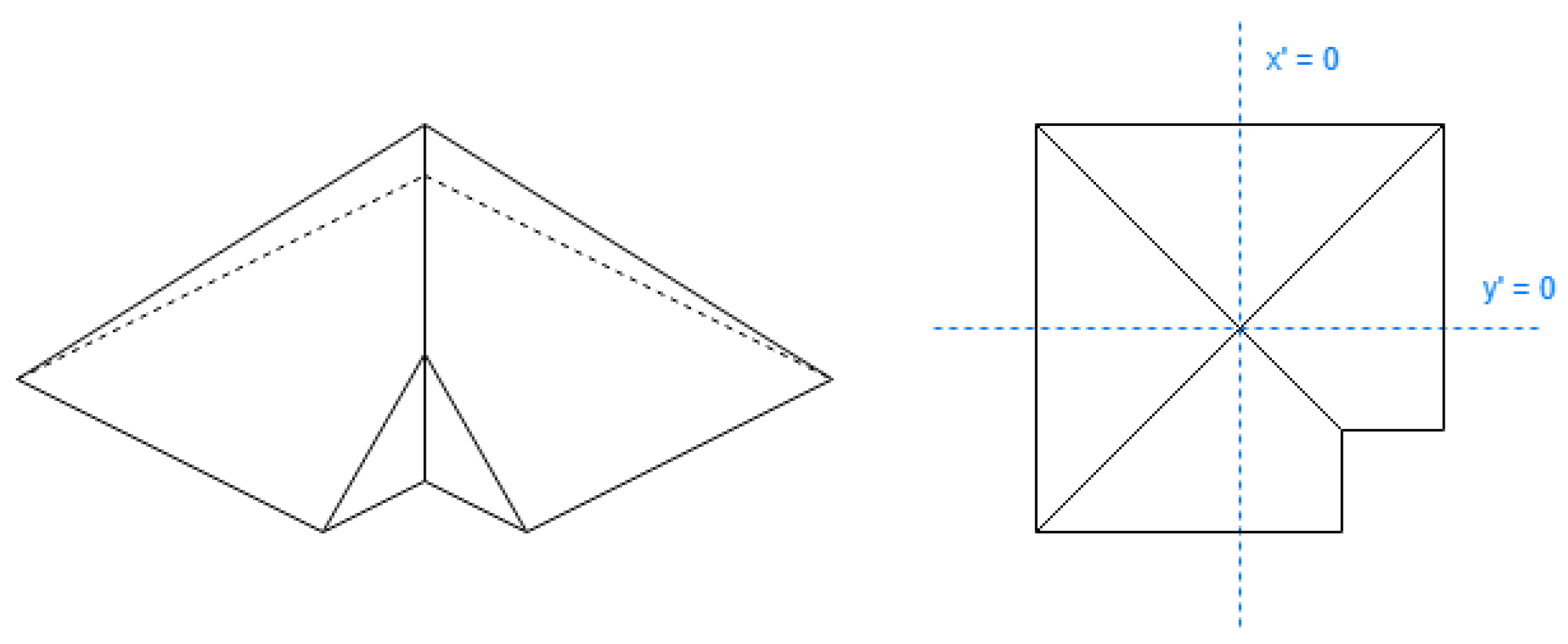
2.3.3. Face Cross Points
When a 2D side is part of the perimeter for more than one 3D face, those coordinates where different faces cross must be considered. These are vertices on top to build the faces of the roof and side extension but not included in the footprint coordinates (
Figure 12).
This process is vital to properly build the cases like the bottom triangle face in the left part of
Figure 12 to create closed volumes. It must be performed with the coordinates of the exterior sides and all the holes, iterating each segment. A triangle or quadrilateral side extension face will be created from each side of the building to the roof height for the points.
When a side contains many cross points, they are ordered by the scale applied to the side vector.
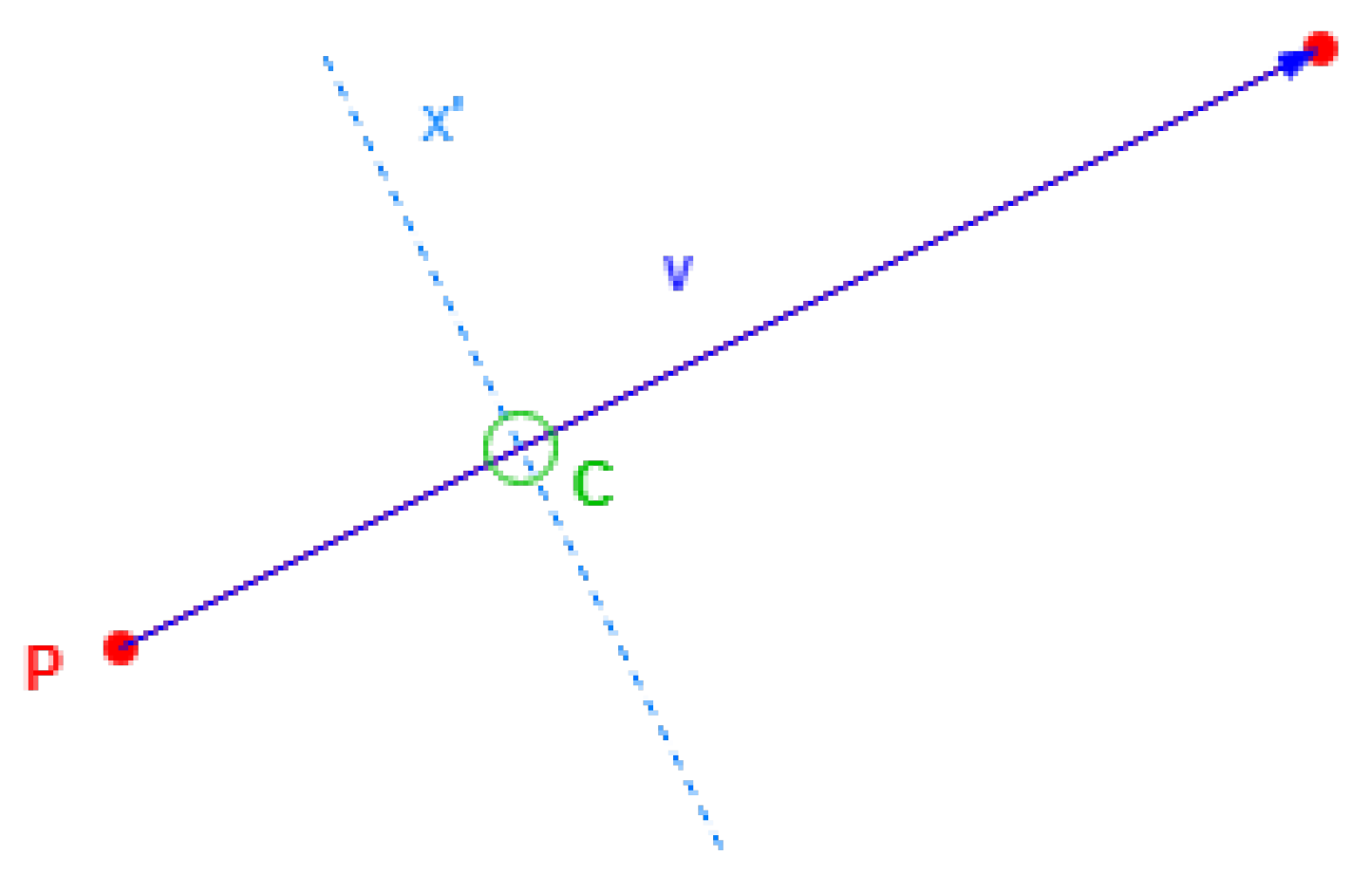
Single Alternative Axis
The cross points appear in specific lines with constant values in the single alternative coordinate, called
cross values, regarding
Figure 13. The value of 0 is commonly employed, typically representing the line with the maximum height on the building roof.
Starting with Equation (
8), a cross point
C is obtained by dragging a building coordinate point
P by a scale of the side vector
to have a determinate
cross value :
The only thing required is for this scale to be dragged, which can be obtained by uniting the preview equations and obtain alone.
Replacing
C to obtain Equation (
9):
The value of
will be as in Equation (
10):
If a building side has a cross point with an alternative position value, the obtained must be within range (0, 1), with the limits excluded to avoid point repetitions.
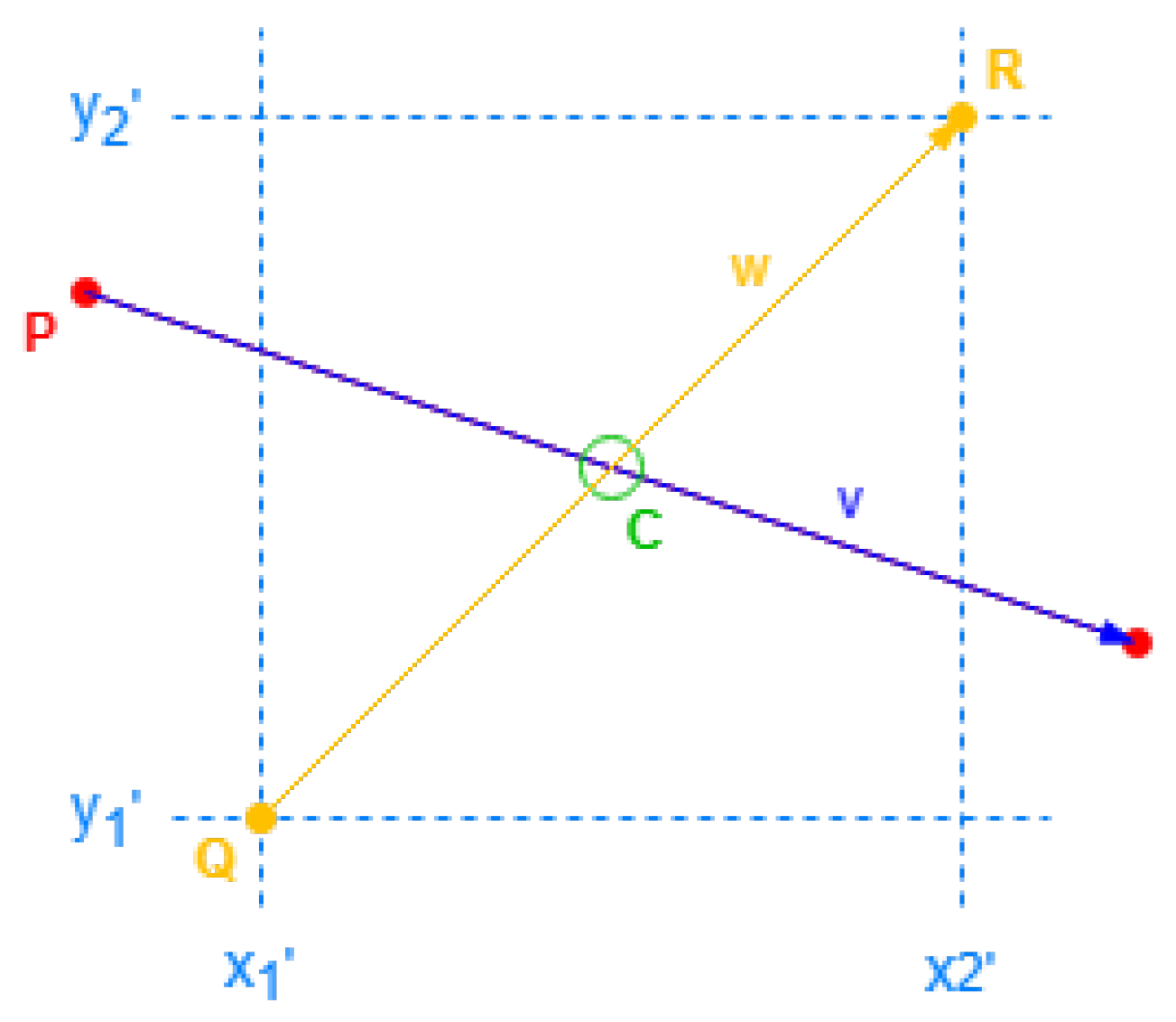
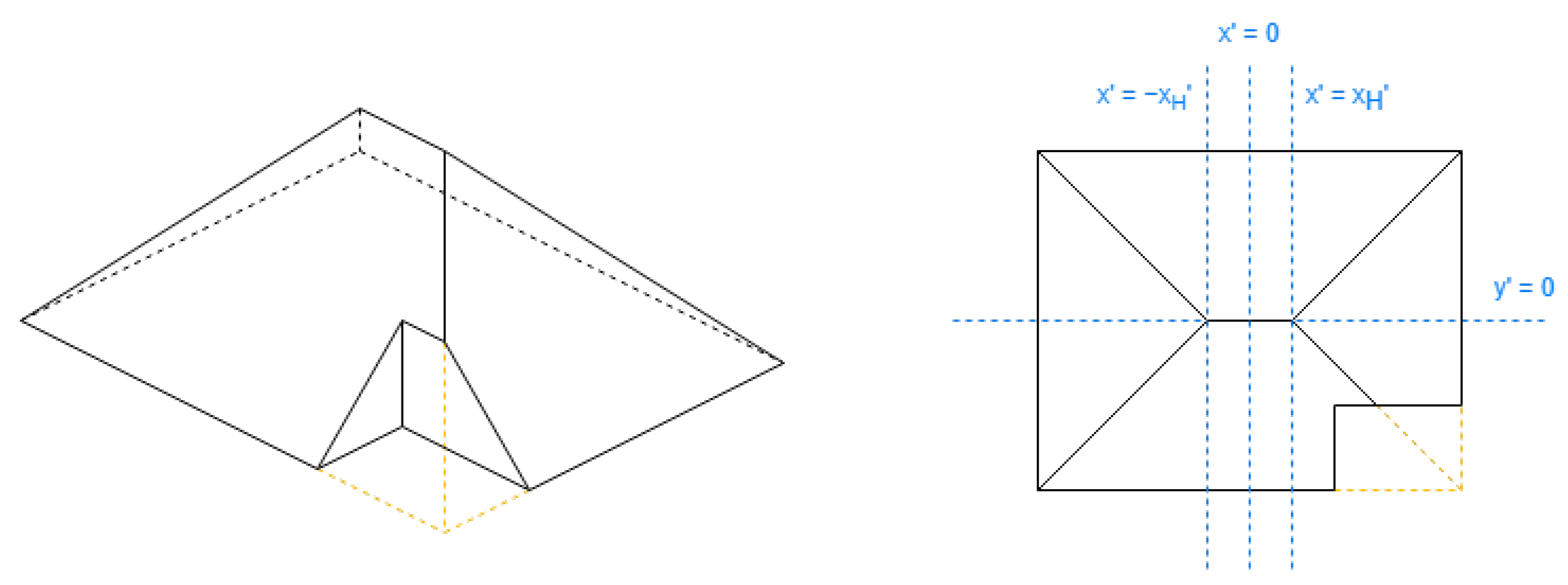
Double Alternative Axis
For the double alternative axis, the cross points are intersections of building sides and specific segments on the roof. Those
cross segments are the inner segments existing in the virtual rectangle roof, and they can be obtained by a reverse translation from Alternative Face Positions defined for the shape of the roof. The cross points are obtained with these segments according to
Figure 14.
Considering the building coordinate
P and the side vector
, and a
cross segment with the format of starting point
Q and the vector
, a cross point is defined by
The scales can be resolved by a linear equation system with two unknowns:
If a side intersects with a cross segment, both scales need to be within range (0, 1), where has the limits excluded to avoid point repetitions, and has the limits included. Furthermore, is used to order many cross points on the same side.
2.3.4. Descending Level Function
OSM information provides the total height of the entire building and the height of the roof part only. The difference between those values is the minimum height of all the points on the roof. The height value of each point on the roof can be obtained by descending a certain distance from the total height value. This distance is a portion of the height of the roof part, related to values in the alternative coordinates.
The points on flat roofs do not need this kind of descent. However, for other shapes, a DLF will be assigned to each necessary alternative coordinate to obtain the descending portion of each point. In cases where two alternative coordinates are utilized, the final descending portion will involve taking the maximum value between them.
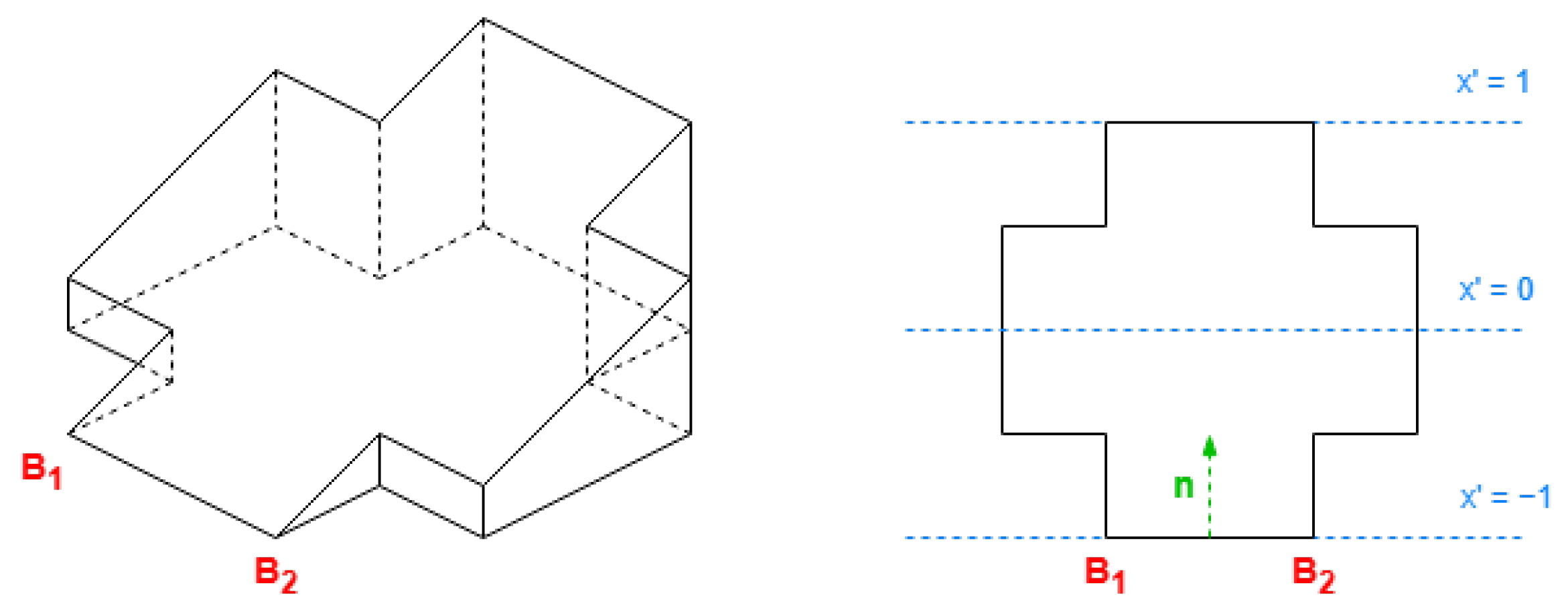
2.3.5. Processing Steps for Roof Shapes Using a Single Alternative Axis
Again, skillion roofs may have a “direction” parameter missing in most cases. When this parameter is given, it will be used as the normal vector to the alternative axis. Otherwise, the second side (
) will be considered as the lower, whose normal vector will be also normal to the alternative axis, as in
Figure 15.
Furthermore, for the “orientation” property for gabled and gambrel roofs, when it is “along”, the alternative axis will be parallel to the primary side direction, when it is “across”, the secondary.
Using the cross values defined in
Table 4, the base coordinates with the cross points are added following
Section 2.3.3. Then, a distribution can be made to the coordinates at the exterior sides to obtain the inclined faces. This distribution follows the order of the information given. Each inclined face is defined by the ranges of alternative values divided by the
cross values.
For example, in
Figure 17, there are 3
cross values, and the roof will have 3 + 1 ranges or inclined faces, where every cross point becomes a vertex for two roof faces.
With each face formed, the next step is to obtain the crop area difference of each face with all the holes. Existing algorithms can be used to achieve that [
30]. The obtained polygons from the difference will be the 2D coordinates of the final roof.
Finally, the DLF in
Table 4 can obtain the vertex heights to create the roof volumes.
2.3.6. Processing Steps for Roof Shapes Using the Double Alternative Axis
The roof generation is based on the virtual rectangle roof, whose coordinates can be obtained by reverse translation from these Alternative Face Positions.
The definition of many roof shapes contains special positions on the alternative coordinates, listed in
Table 5, mostly depending on the scale between the extension length of both alternative coordinates (
and
) for each building. The equations are independent for each roof shape. These geometries on the alternative coordinates based on these special positions are listed in
Table 6.
The value of
for half-hipped roofs in
Table 5 may be understood better with this expression in Equation (
14), comparing
Figure 19 and
Figure 20:
The cross points can be obtained following
Section 2.3.3 using the cross segments in
Table 6, and these points construct the segments containing the side extension faces to close the volume.
The 2D coordinates of the resulting roof faces are obtained by 2D intersections [
30] of the building footprint coordinates with each virtual face in
Table 6.
The half-hipped and mansard shapes are variants of the hipped shape, representing a shared aspect. Regarding
Table 5, the special value
is obtained to discard a middle section on the longest side coordinate; it will be reflected further with the DLFs.
The mansard roof can be viewed as a hipped roof with two slopes on each side, their positioning dependent on the algorithm parameter of MP. The list of cross segments for the mansard shape contains all the segments for the hipped shape.
Finally, the height of the vertices is obtained using the DLFs in
Table 7 to create all the roof faces and side extension faces. Applying Equation (
13), the descent height portion for each vertex will be the maximum between the results of both DLFs.
Note in
Table 7,
depends on
for the mansard roof shape.
2.4. Compatible Additional Developments
2.4.1. Output Model Formats
Initially, the existing literature relies on Wavefront OBJ files as the exclusive output format, which has certain limitations. The data are stored in a human-readable plain-text format and are only suitable for static models.
An option of using the Graphics Library Binary (GLB, binary version of Graphics Library Transmission Format) output format has been added in this work, which is computationally more efficient by binary storage and allows real-time updates on the models for web usage.
2.4.2. Adjustments to Radio-Propagation Requirements
This enhancement is specific to the GLB format. In radio-propagation operations, if a ray falls within the gap between two connected buildings, it necessitates a mirror reflection. However, the actual reflection may experience deviations around the corners.
To resolve this problem, the solution is to consider the connected buildings or 3D models as unique ones, with support of the Node version of library
THREE-CSGMesh [
31], applying geometry unions to the connected models. When dealing with a sufficiently large number of buildings, the geometry union process can become time-consuming. Therefore, its application should be presented as an option that users can decide upon through the user interface.
2.4.3. Special Roof Shapes
The following roofs have no details to be considered for exclusive math description, but specific details for programming exist for them. When a building has those roof shapes, the same programmed algorithms are used for rectangle and non-rectangle roofs, based on alternative coordinates used for non-rectangle footprints (
Section 2.3.1).
Round Roof
In 3D modeling, any circular shape is represented by a collection of triangles, and the round roofs are half cylinders for the buildings with rectangle footprints. So, the algorithm requires a parameter about how many faces should be used for the round roof for this approximation.
A single alternative axis is required, which is based on the primary side direction for roofs with orientation “along” and based on the secondary side direction for orientation “across”.
The cross values depend on the number of faces used for approximation to the half cylinder, dividing the range in that number of parts, then use the limit values as the cross values, excluding −1 and 1 themselves.
For example, when eight faces are used to resemble the half cylinder, the
cross values will be
The descending level function is
Onion and Dome Roof
Those roofs with sphere parts are defined mainly by a mesh in the Three. JS library [
32], so those roof shapes are exclusive to the GLB format.
Double alternative coordinates are needed to locate the center location of each building, where .
The building body, in isolation, is represented by a flat roof. The final mesh of a building is then created by combining the body with the specialized roof mesh.
A sphere mesh is required for both roof shapes. The XY of the center can be obtained by reverse translation on the alternative coordinates (
7), the Z of the center will be the building height, and the sphere radius depends on the shorter coordinate. The value of
from the secondary alternative coordinate found in Equation (
4) is the perfect value. With it, the XY scope of the sphere mesh never stands out from the building body.
In the case of a dome roof, an additional cone mesh extending from the preceding sphere mesh is necessary. The base center of the cone also aligns with the center location of the building in the XY position. However, there is no singular solution for the other parameters, the Z position of the cone base center, the base radius, and the cone height. A possible solution is
2.4.4. Missing Data Estimation
Certain information is unavailable from OSM, necessitating the implementation of judicious decisions to complete the data and facilitate the execution of the programmed algorithm. For instance, the essential heights for the foundation of the 3D modeling are tagged on merely 2.9% of the buildings [
33].
These are the decisions for qualitative parameters:
When the roof shape of a building is not given, the roof will be considered flat.
At times, the classification of roof shape is designated as pitched, encompassing all roof configurations with inclinations. In such cases, these roofs will be construed as gabled given that this category constitutes the predominant type observed in practical instances.
In instances where a building is characterized by a roof shape classified as gabled, hipped, gambrel, or round yet lacks specific orientation information, the assumed orientation will be deemed as across for gambrel roofs, aligning with the prevalent orientation observed in other roof types. This estimation aligns consistently with all identified examples.
The following determinations pertain to quantitative parameters, specifically the total height of buildings and the height of their roofs. In most cases, these determinations rely on referencing existing data from other buildings within the same request area:
On occasion, precise height values may not be explicitly provided; however, estimations can be derived based on parameters such as the number of levels in the building, body levels, and roof levels. An assumed average height of 3.5 m per level is considered for these estimations. It is noteworthy that there may be variations in attribute names for these parameters, with pairs like “levels” and “building:levels”, as well as “roofLevels” and “roof:levels”, conveying equivalent meanings.
When height information is missing in part of the buildings in an area request, those buildings can use average values from the others with values given, including the values obtained in the previous estimation by levels. This estimation proves effective in areas where buildings share similar or identical heights. However, a validation check is imperative for this estimation, ensuring that the height attributed to the roof never surpasses the total height of the building.
When all the buildings in an area request do not have the building total height given, a default of 8 m will be used.
In cases where the roof height is not provided for all buildings within a given area request or when values derived from other estimations lack coherence, the roof height will be deemed as one-tenth (1/10) of the total height.
2.4.5. Others Important Parameters
The minimum height is a straightforward parameter for some buildings that do not contact the ground; it involves assigning distinct Z coordinates to the bottom face of the corresponding 3D features.
Another parameter is the building colors. Each building may have a body color and a roof color. In this work, the colors are exclusively tailored for the GLB format, wherein the mesh functionality permits the incorporation of color definitions for each vertex within every triangle. Notably, as the current requirements do not necessitate gradient colors, each triangle is uniformly assigned a single color across all three vertices.
The vertices can be part of many triangles but with different color definitions for each one.
In OSM data, color definitions exclusively vary between roof color and body color. A default gray color will be applied when such definitions are absent.
It is important to note that the ground, for which appropriate definitions are yet to be found, is also rendered with a default gray color.
2.5. Final Run-Time Steps Description
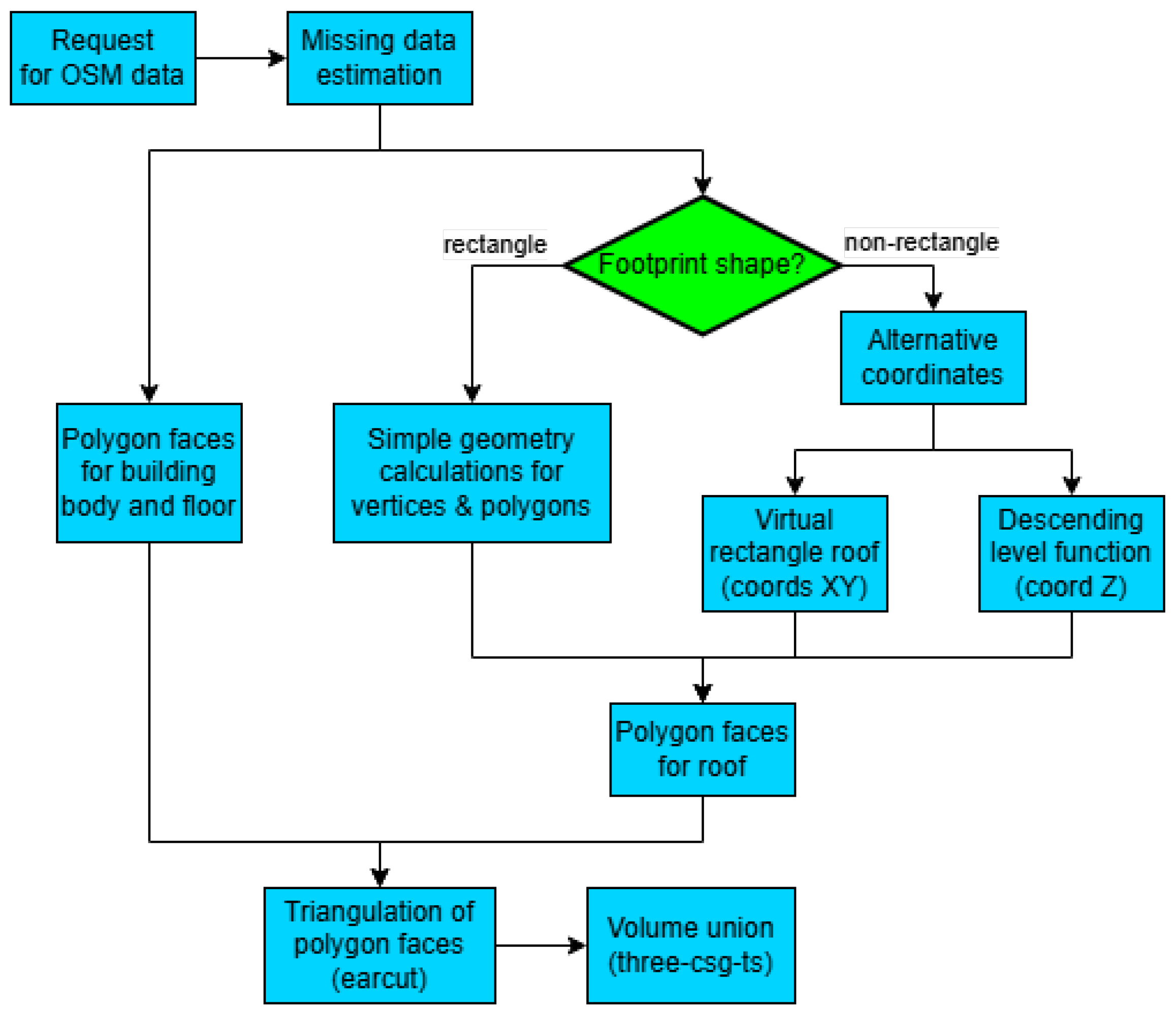
This section gives a quick view of the steps made by the program to build the 3D model of an area (illustrated in
Figure 22):
Send a request to the service of the data mining tool overpass-turbo [
3] for a specific range of latitude and longitude and containing only building features.
Check the information given, filter strange values for known parameters, like a roof shape without an algorithm defined, and try to fill in some missing information as described in
Section 2.4.4.
Process each building feature, create the base building sides by creating a vertical rectangle for each segment of the building 2D coordinates (exterior and holes) and also the bottom face by triangulation of the full coordinates with earcut [
29].
When the roof of the building has a non-flat shape with the algorithm defined, obtain and add the roof and side extension faces to the model. Otherwise, use a single flat top face of full coordinates, making a similar triangulation as in the bottom face.
Complete the 3D model by union with the mesh functionality if the desired output format supports it.
Consolidate the various interconnected buildings in 3D space into a unified 3D feature to mitigate radio-propagation deviations.
Create the output model with merged features, with all 3D coordinates and coloring already defined, and add a ground face at the end.
Figure 22.
Flowchart of the entire research methodology.
Figure 22.
Flowchart of the entire research methodology.
4. Discussion
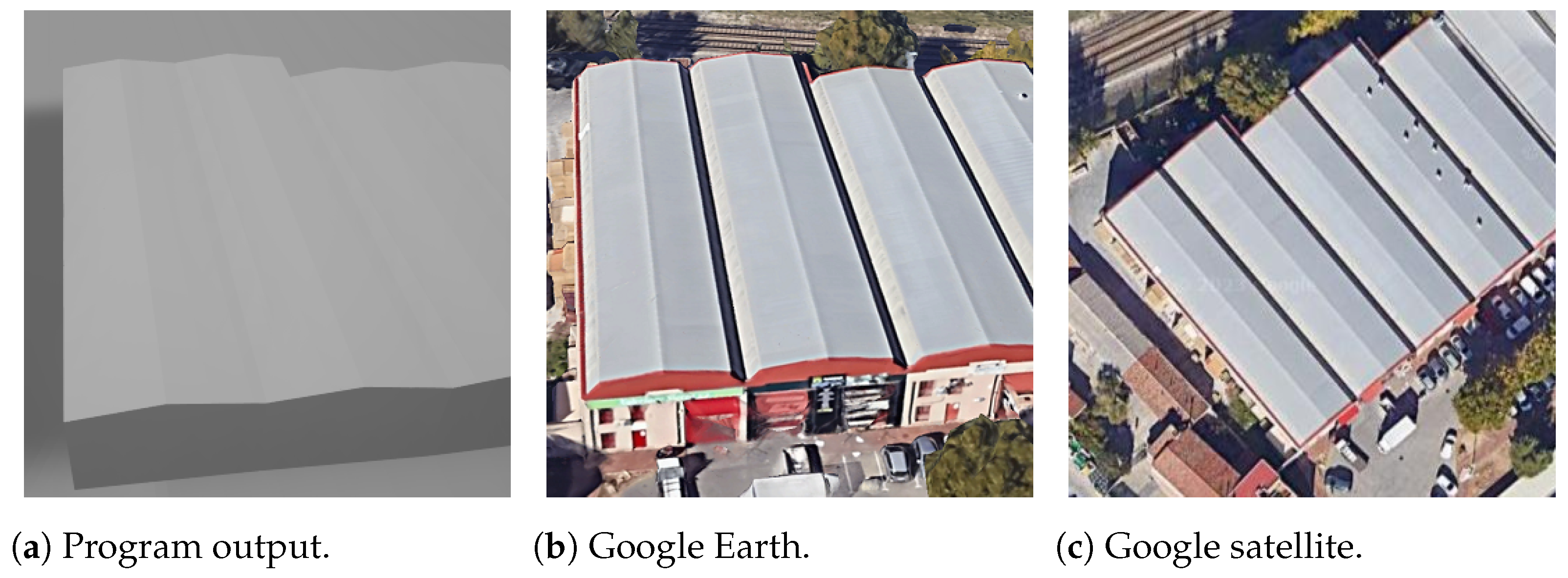
This section discusses the achievement of the method and its results concerning the hypothesis. No studies with the same focus were found for comparison.
In this paper, the algorithms to add roofs to 3D building models using OSM information were created. Regarding the first hypothesis, “whether it is possible to create a method to add the roofs to 3D building models using exclusively OSM information”, the possibility was successfully demonstrated by combining the algorithms up to the aspect parameters.
Regarding the second point, “whether the method can sustain its functionality under certain deviations in the given information”, the algorithms maintained their functionality despite certain deviations in the provided information, particularly in cases of missing data.
Concerning the third hypothesis, “whether the method can sustain its functionality for high-complexity inputs, like buildings with too many sides and/or holes”, the algorithms exhibit excellent precision for buildings with rectangular footprints. However, for structures with complex footprints, the method performs well only when the buildings have holes and exterior borders similar to rectangles.
Regarding the fourth hypothesis, “whether the names of shapes of the building roofs can always be distinguishable in the method results”, two challenges were identified. Firstly, certain roof shapes lack a unique and definitive definition. For instance, the saltbox shape presents difficulties in devising a suitable mathematical algorithm using only OSM information, necessitating additional estimation ideas or alternative data sources. Secondly, based on the results presented in
Section 3, some roof shapes may not be reliably distinguishable in specific complex cases.
With respect to the last hypothesis, “whether the output models can archive considerable similarity to the real buildings”, this is achieved for simple buildings with complete information. However, other cases have numerous challenges, as highlighted in the preceding hypothesis points and sections. Challenges include uncontrolled building body parts, the appropriateness of the technique for non-rectangular footprints, potential inaccuracies in estimations for missing information based on studied tags, and the presence of tags that were not studied, among other factors.
5. Conclusions
As mentioned in
Section 4, the technique applied to virtual rectangles is not universally suitable for non-rectangular footprints, indicating the need for further refinement and improvement in handling such cases. Additionally, another idea is put forth to augment the overall performance of this work.
For buildings where the virtual rectangle roof technique is not suitable, a complementary method is needed to address these challenges. In the future, a proposed enhancement of the methodology concerning buildings without a rectangular footprint will address the issue of indistinguishable roof shapes.
The technique improvement for non-rectangle footprints has a viable solution: creating new algorithms to replace complex orthogonal polygons with a combination of rectangles, as demonstrated in
Figure 5 from the work of Sugihara et al. [
34]. The key points in this solution are as follows:
Use the minimum number of rectangles.
Determine the rectangles with the maximum sum of areas, allowing for potential overlap between rectangles. The objective is to maximize the combined area of these rectangles without increasing the overall count of rectangles.
Generate a 3D roof for each of these rectangles. Subsequently, these individual roofs are combined using the union operation to form the final composite roof.
This approach may be more suitable for buildings with diverse shapes of exterior borders, as demonstrated in existing applications [
34]. However, to classify how the building roofs are constructed, whether through the subdivision of a rectangle (
Section 2.3) or the union of multiple rectangles [
34], additional information or estimation will be required.
In contrast, the introduced GLB 3D model transmission format has the potential to facilitate real-time modifications in the generated models. Subsequent efforts could explore its integration into the dynamic web interface of 3D modeling, transforming it from a static storage format to a platform capable of dynamic, real-time changes.
Additional future improvements could involve incorporating more sophisticated modeling techniques, such as machine learning algorithms, which could better adapt to diverse roof shapes and building complexities. Furthermore, integrating more granular geospatial data from sources like LiDAR or higher-resolution satellite imagery could enhance the algorithm’s ability to handle intricate architectural details.
In terms of practical applications, the proposed algorithm has significant potential in urban planning and smart city initiatives. It could be used to generate accurate 3D models for urban simulations, solar energy analysis, and urban heat island effect studies. The generated models can also be employed in augmented reality applications, providing a more immersive experience for urban visualization.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}