
A Ray-Tracing-Based Single-Site Localization Method for Non-Line-of-Sight Environments




Abstract
1. Introduction
- To improve the performance of existing RT methods and better align them with the proposed localization approach, this paper integrates the advantages of both RT and the shooting and bouncing ray (SBR) technique. Furthermore, an innovative adaptive ray tube structure is introduced, allowing the propagation effects within the environment to be more accurately captured and reflected in the localization algorithm.
- The localization method integrates AOA localization with RT to construct nonlinear equations using GSs generated by sensors in the environment. A heuristic approach for determining equation weights based on angle and power residuals is constructed, and the IRLS method is applied for the precise localization of NCTSs. Simulations and experimental results show that the proposed method reaches the CRLB.
- In NLOS scenarios, regions with rapid multipath birth and death processes can severely compromise the robustness of localization algorithms. To address this, this paper introduces an MSDM designed based on multipath similarity. By integrating the MSDM, the robustness of the localization algorithm in these challenging regions is significantly improved.
- In this paper, the localization algorithm requires repeated invocations of the ray-tracing (RT) process for path generation, which involves extensive traversal of the node tree structure constructed by the RT algorithm. This results in decreased computational efficiency. To address this issue, a fast GPU-based algorithm is proposed, which accelerates the path generation component of the RT within the localization algorithm, thereby significantly improving its overall efficiency.
2. The Improvement of the Ray-Tracing Algorithm
2.1. Ray-Splitting Algorithm
| Algorithm 1. Ray-splitting algorithm |
| Input: Ray-splitting threshold Precondition: Create a stack object stack and stack the virtual root node. |
| While stack is not empty Pop up the top element node on the stack |
| Obtain ray in . Calculate the intersection point between and the scene Calculate the ray-splitting information if Obtain the GS node of Calculate the set of splitting nodes based on Mount all nodes in onto the right sibling node of delete End if Trace rays and execute other programs |
| End While |
2.2. Ray Reception Algorithm
2.3. Electromagnetic Field Computation
3. Single-Site Localization Algorithm for NLOS Environment
3.1. Establishment of Generalized Sources
3.2. Generalized Source Filtering Rules
- If is located inside a building or outside the solution domain, the position is considered invalid.
- Construct line segments and connecting position with and at the intersection points and , respectively. If and intersect within the environment, then is considered an invalid solution.
3.3. Generalized Source Weight Calculation
3.4. IRLS
- The value of the objective function falls below the predefined threshold ;
- The Euclidean distance between consecutive iterative solutions is less than the threshold ;
- The number of iterations has reached the maximum limit .
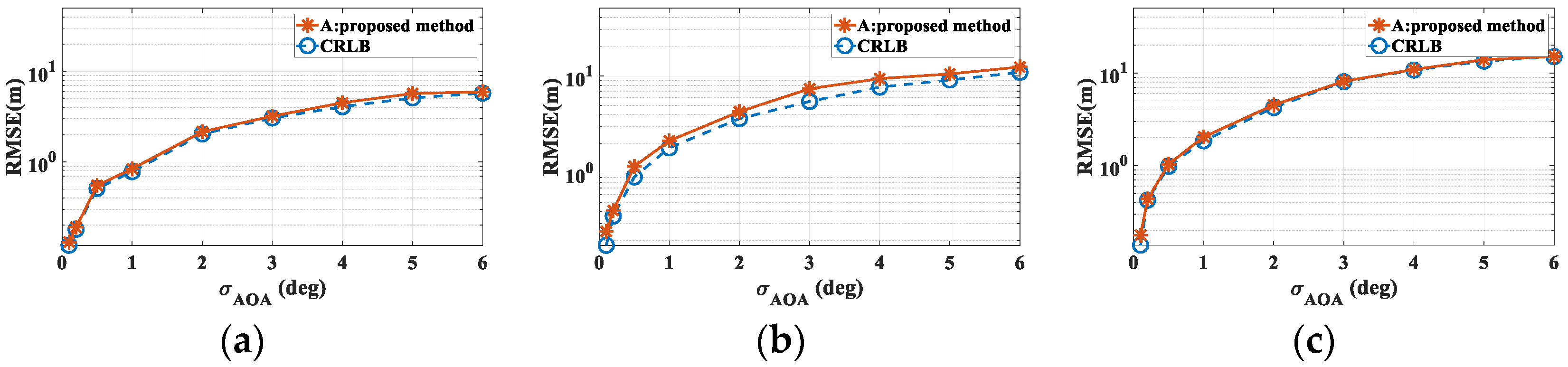
3.5. Cramér–Rao Lower Bound
4. Simulation and Experimental Results
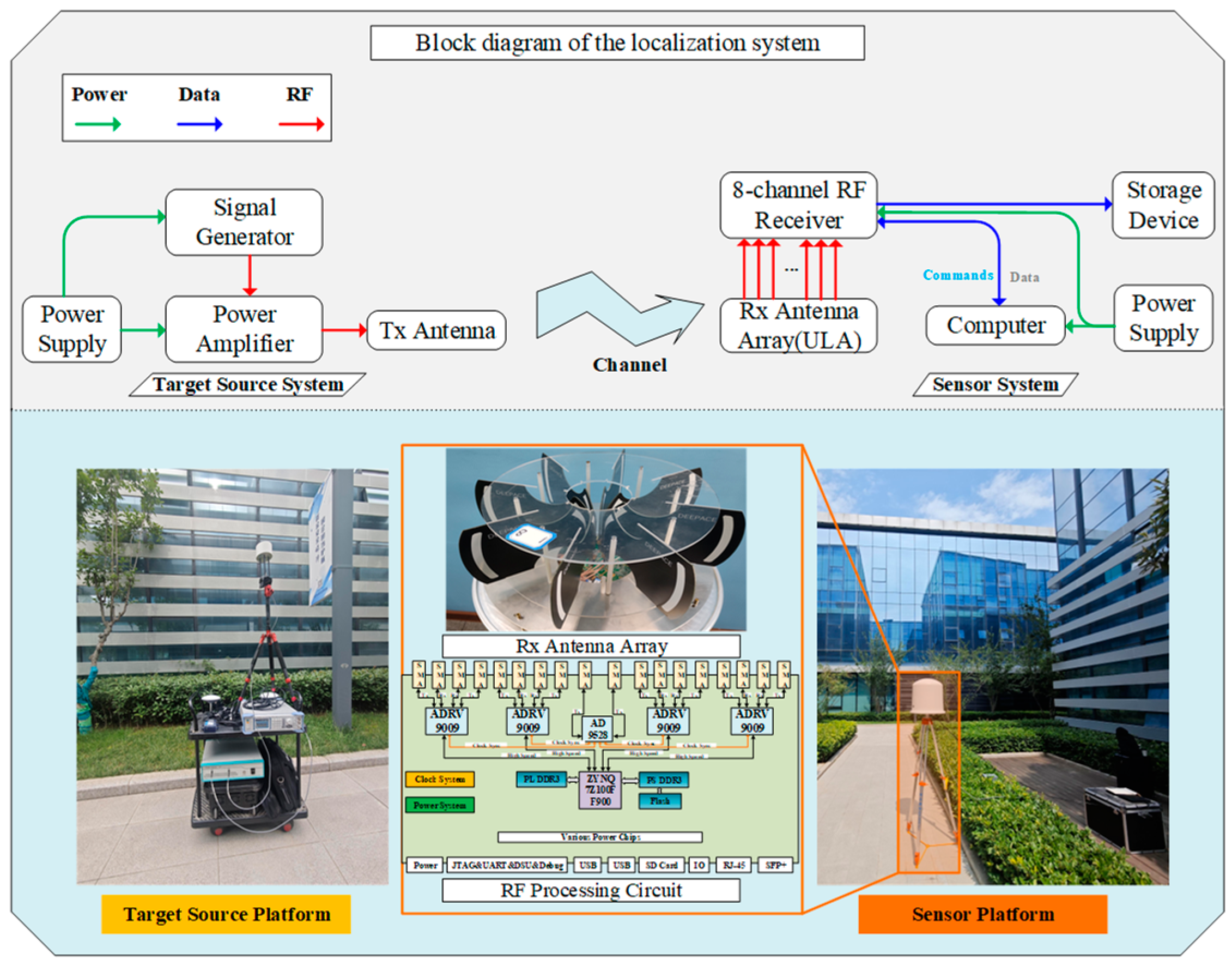
4.1. Measurement Campaign
4.1.1. Measurement Equipment
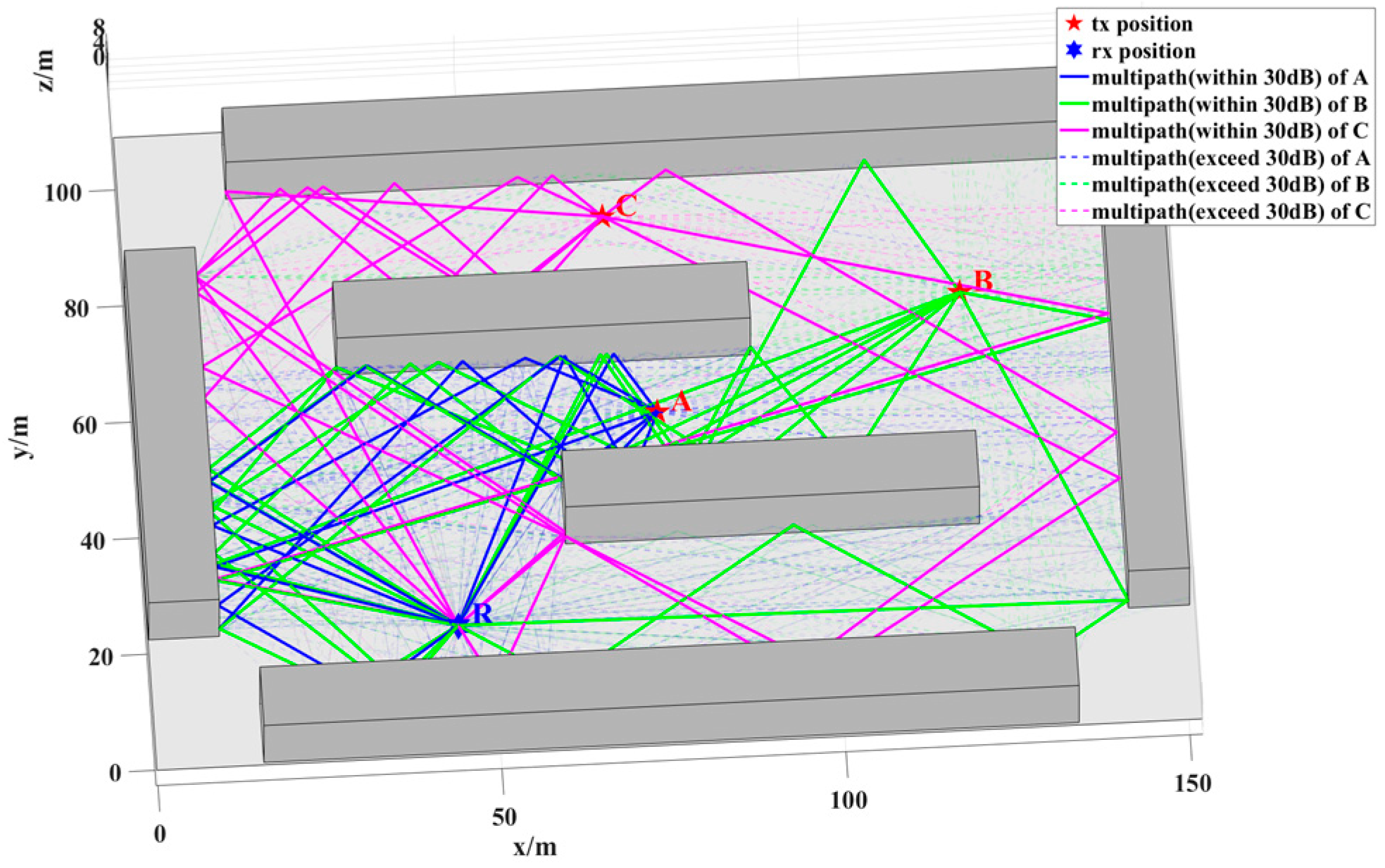
4.1.2. Measurement Scenarios
4.2. Processing Measured Results and Verification of Models
4.2.1. Power Measurement Data Processing
4.2.2. Power Simulation and Verification
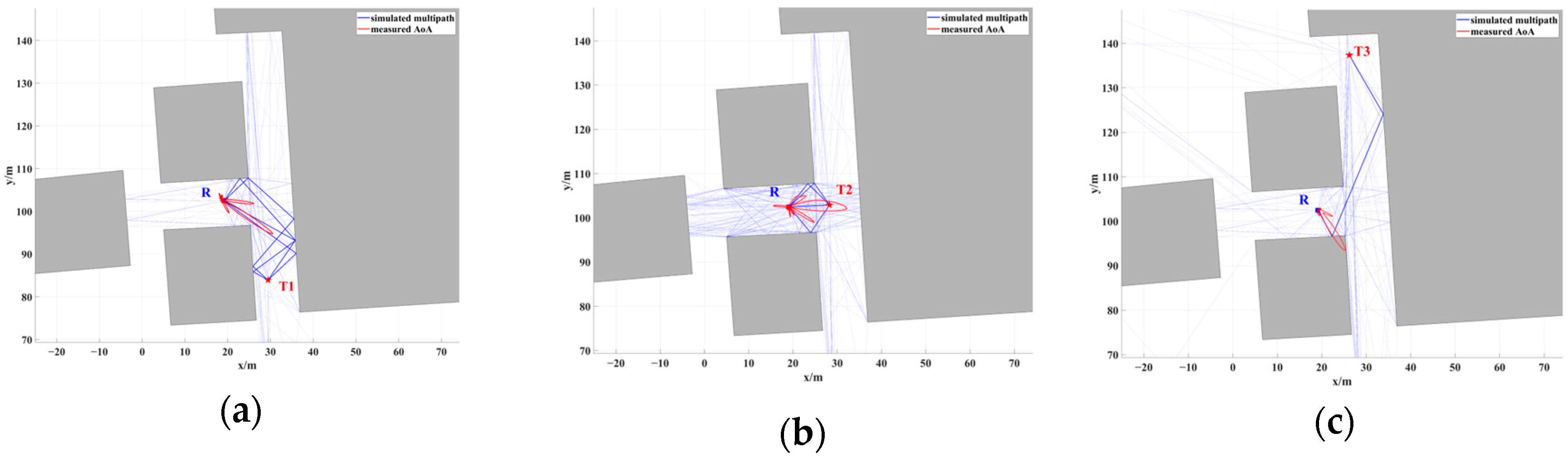
4.2.3. AOA Measurement Data Processing
4.2.4. Localization Algorithm Verification
5. Efficiency and Performance Analysis of Localization Algorithm
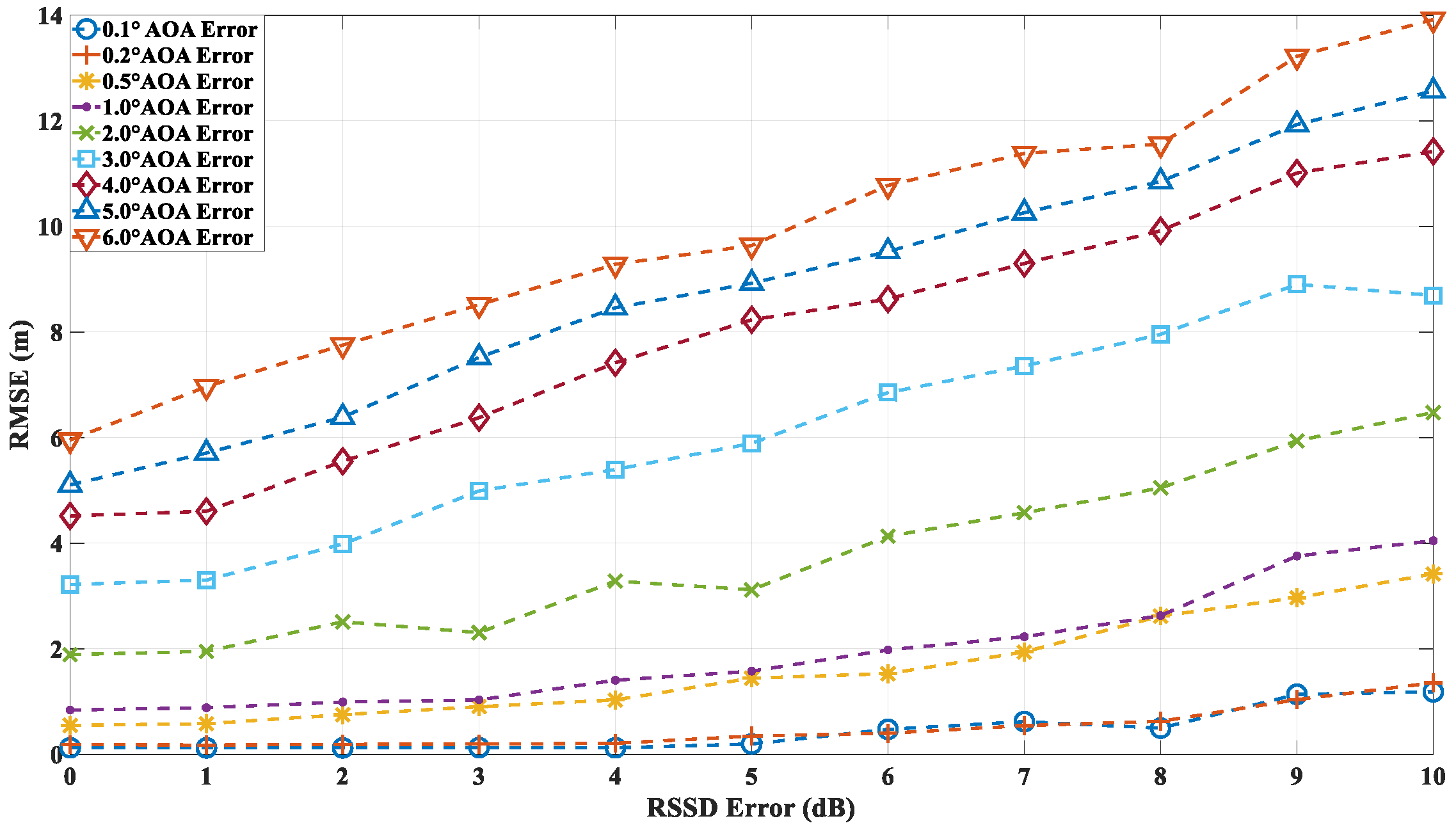
5.1. Comparison of Localization Accuracy with Different AOA and RSSD Errors
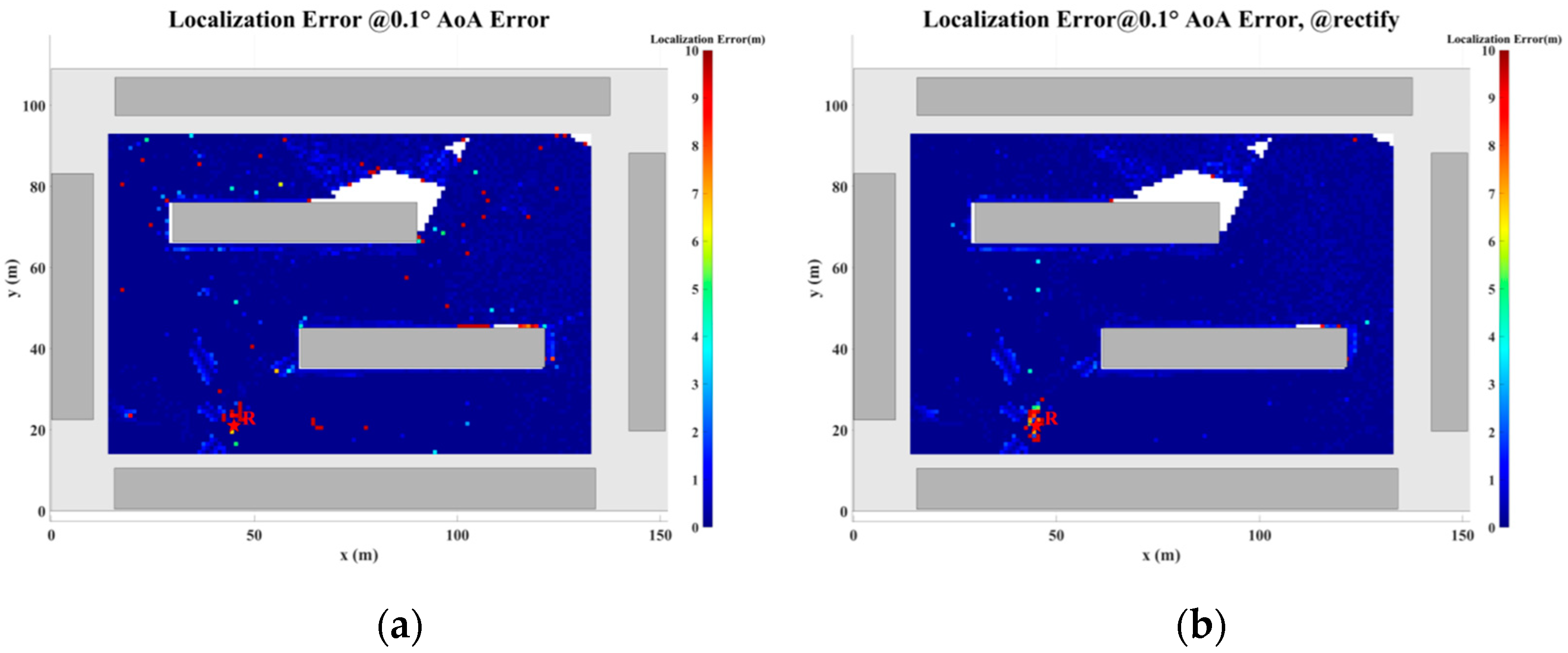
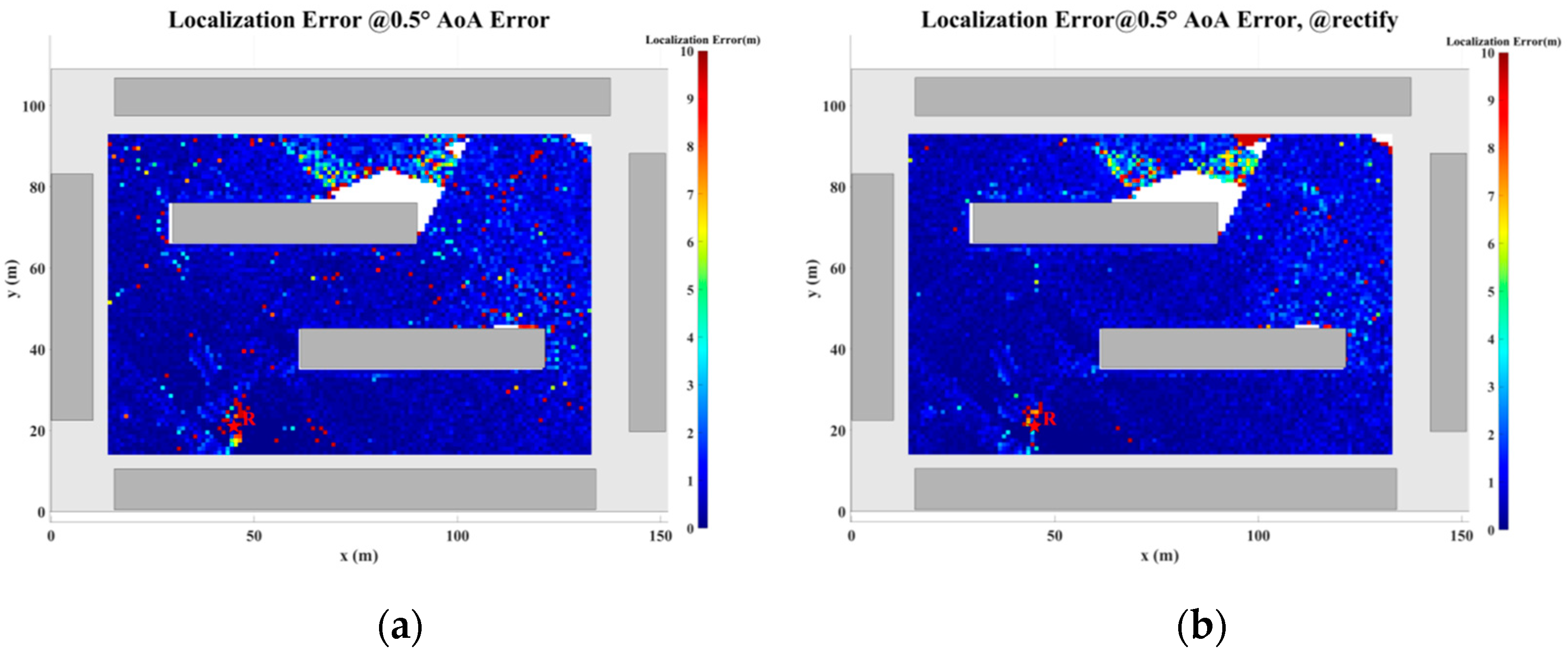
5.2. Localization Error Analysis Across the Entire Plane
5.3. GPU-Accelerated Analysis of Localization Algorithm
6. Discussion and Future Work
- (1)
- The geometric modeling in this study utilizes high-precision LiDAR point cloud data with an accuracy of up to 5 cm. However, this precision is negligible compared to errors caused by multipath propagation, meaning potential biases from building structure inaccuracies in digital maps are not accounted for here. Even with lower-accuracy maps, such as those sourced from platforms like OpenStreetMap, the prediction accuracy of the ray-tracing algorithm remains acceptable [45]. However, in practical applications, such high-precision data are rarely available. Therefore, future research should address errors from low-accuracy digital maps to enhance the algorithm’s adaptability and performance in real-world scenarios.
- (2)
- The proposed localization algorithm relies on RT, with its accuracy directly affecting localization performance. However, the current model overlooks the impact of vegetation penetration, reducing prediction accuracy in vegetated areas.
- (1)
- Given the above limitation regarding vegetation, future work should integrate a vegetation penetration model to improve localization accuracy in such environments.
- (2)
- The localization algorithm was evaluated in urban NLOS scenarios, but NLOS conditions are often more prominent indoors, suggesting the need for further investigation. The current 2D RT algorithm also struggles with propagation mechanisms involving floors and ceilings in enclosed spaces. Developing a 3D localization algorithm could significantly improve accuracy in such environments.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yin, J.; Wan, Q.; Yang, S.; Ho, K.C. A Simple and Accurate TDOA-AOA Localization Method Using Two Stations. IEEE Signal Process Lett. 2016, 23, 144–148. [Google Scholar] [CrossRef]
- Shakya, D.; Ju, S.; Kanhere, O.; Poddar, H.; Xing, Y.; Rappaport, T.S. Radio Propagation Measurements and Statistical Channel Models for Outdoor Urban Microcells in Open Squares and Streets at 142, 73, and 28 GHz. IEEE Trans. Antennas Propag. 2024, 72, 3580–3595. [Google Scholar] [CrossRef]
- Holm, P.D. A New Heuristic UTD Diffraction Coefficient for Nonperfectly Conducting Wedges. IEEE Trans. Antennas Propag. 2000, 48, 1211–1219. [Google Scholar] [CrossRef]
- Lee, J.-H.; Choi, J.-S.; Kim, S.-C. Cell Coverage Analysis of 28 GHz Millimeter Wave in Urban Microcell Environment Using 3-D Ray Tracing. IEEE Trans. Antennas Propag. 2018, 66, 1479–1487. [Google Scholar] [CrossRef]
- Sharp, I.; Yu, K. Indoor TOA Error Measurement, Modeling, and Analysis. IEEE Trans. Instrum. Meas. 2014, 63, 2129–2144. [Google Scholar] [CrossRef]
- Hara, S.; Anzai, D.; Yabu, T.; Lee, K.; Derham, T.; Zemek, R. A Perturbation Analysis on the Performance of TOA and TDOA Localization in Mixed LOS/NLOS Environments. IEEE Trans. Commun. 2013, 61, 679–689. [Google Scholar] [CrossRef]
- Zou, Y.; Zhang, Z. Fuzz C-Means Clustering Algorithm for Hybrid TOA and AOA Localization in NLOS Environments. IEEE Commun. Lett. 2024, 28, 1830–1834. [Google Scholar] [CrossRef]
- Yu, K.; Guo, Y.J. Statistical NLOS Identification Based on AOA, TOA, and Signal Strength. IEEE Trans. Veh. Technol. 2009, 58, 274–286. [Google Scholar] [CrossRef]
- Liu, D.; Lee, M.-C.; Pun, C.-M.; Liu, H. Analysis of Wireless Localization in Nonline-of-Sight Conditions. IEEE Trans. Veh. Technol. 2013, 62, 1484–1492. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, S.; Huang, D. A TOA-Based Localization Algorithm With Simultaneous NLOS Mitigation and Synchronization Error Elimination. IEEE Sens. Lett. 2019, 3, 6000504. [Google Scholar] [CrossRef]
- Su, Z.; Shao, G.; Liu, H. Semidefinite Programming for NLOS Error Mitigation in TDOA Localization. IEEE Commun. Lett. 2018, 22, 1430–1433. [Google Scholar] [CrossRef]
- Ferreira, A.G.; Fernandes, D.; Branco, S.; Catarino, A.P.; Monteiro, J.L. Feature Selection for Real-Time NLOS Identification and Mitigation for Body-Mounted UWB Transceivers. IEEE Trans. Instrum. Meas. 2021, 70, 5502310. [Google Scholar] [CrossRef]
- Ishida, K.; Okamoto, E.; Li, H.-B. A Robust Indoor Localization Method for NLOS Environments Utilizing Sensor Subsets. IEEE Open J. Signal Process. 2022, 3, 450–463. [Google Scholar] [CrossRef]
- Maranò, S.; Gifford, W.M.; Wymeersch, H.; Win, M.Z. NLOS Identification and Mitigation for Localization Based on UWB Experimental Data. IEEE J. Sel. Areas Commun. 2010, 28, 1026–1035. [Google Scholar] [CrossRef]
- Kong, Q. NLOS Identification for UWB Positioning Based on IDBO and Convolutional Neural Networks. IEEE Access 2023, 11, 144705–144721. [Google Scholar] [CrossRef]
- Abolfathi Momtaz, A.; Behnia, F.; Amiri, R.; Marvasti, F. NLOS Identification in Range-Based Source Localization: Statistical Approach. IEEE Sens. J. 2018, 18, 3745–3751. [Google Scholar] [CrossRef]
- Dong, Y.; Arslan, T.; Yang, Y. Real-Time NLOS/LOS Identification for Smartphone-Based Indoor Positioning Systems Using WiFi RTT and RSS. IEEE Sens. J. 2022, 22, 5199–5209. [Google Scholar] [CrossRef]
- Xu, W.; Zekavat, S.A.R. Novel High Performance MIMO-OFDM Based Measures for NLOS Identification in Time-Varying Frequency and Space Selective Channels. IEEE Commun. Lett. 2012, 16, 212–215. [Google Scholar] [CrossRef]
- Zhang, J.; Salmi, J.; Lohan, E.-S. Analysis of Kurtosis-Based LOS/NLOS Identification Using Indoor MIMO Channel Measurement. IEEE Trans. Veh. Technol. 2013, 62, 2871–2874. [Google Scholar] [CrossRef]
- Liang, Y.; Li, H. LOS Signal Identification for Passive Multi-Target Localization in Multipath Environments. IEEE Signal Process. Lett. 2023, 30, 1597–1601. [Google Scholar] [CrossRef]
- Cong, L.; Zhuang, W. Nonline-of-Sight Error Mitigation in Mobile Location. IEEE Trans. Wirel. Commun. 2005, 4, 560–573. [Google Scholar] [CrossRef]
- Miao, H.; Yu, K.; Juntti, M.J. Positioning for NLOS Propagation: Algorithm Derivations and Cramer–Rao Bounds. IEEE Trans. Veh. Technol. 2007, 56, 2568–2580. [Google Scholar] [CrossRef]
- Hajiakhondi-Meybodi, Z.; Mohammadi, A.; Hou, M.; Plataniotis, K.N. DQLEL: Deep Q-Learning for Energy-Optimized LoS/NLoS UWB Node Selection. IEEE Trans. Signal Process. 2022, 70, 2532–2547. [Google Scholar] [CrossRef]
- Zhu, Y.; Xia, W.; Yan, F.; Shen, L. NLOS Identification via AdaBoost for Wireless Network Localization. IEEE Commun. Lett. 2019, 23, 2234–2237. [Google Scholar] [CrossRef]
- Yousefi, S.; Chang, X.-W.; Champagne, B. Mobile Localization in Non-Line-of-Sight Using Constrained Square-Root Unscented Kalman Filter. IEEE Trans. Veh. Technol. 2015, 64, 2071–2083. [Google Scholar] [CrossRef]
- Cheng, J.H.; Yu, P.P.; Huang, Y.R. Application of Improved Kalman Filter in Under-Ground Positioning System of Coal Mine. IEEE Trans. Appl. Supercond. 2021, 31, 0603904. [Google Scholar] [CrossRef]
- Qin, P.; Hu, Q.; Yu, H. An Internet of Electronic-Visual Things Indoor Localization System Using Adaptive Kalman Filter. IEEE Sens. J. 2023, 23, 16058–16067. [Google Scholar] [CrossRef]
- Wang, Z.; Zekavat, S.A. Omnidirectional Mobile NLOS Identification and Localization via Multiple Cooperative Nodes. IEEE Trans. Mob. Comput. 2012, 11, 2047–2059. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M. A Robust NLOS Bias Mitigation Technique for RSS-TOA-Based Target Localization. IEEE Signal Process. Lett. 2019, 26, 64–68. [Google Scholar] [CrossRef]
- Yu, K.; Wen, K.; Li, Y.; Zhang, S.; Zhang, K. A Novel NLOS Mitigation Algorithm for UWB Localization in Harsh Indoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 686–699. [Google Scholar] [CrossRef]
- Katwe, M.; Ghare, P.; Sharma, P.K.; Kothari, A. NLOS Error Mitigation in Hybrid RSS-TOA-Based Localization Through Semi-Definite Relaxation. IEEE Commun. Lett. 2020, 24, 2761–2765. [Google Scholar] [CrossRef]
- Wu, H.; Liang, L.; Mei, X.; Zhang, Y. A Convex Optimization Approach for NLOS Error Mitigation in TOA-Based Localization. IEEE Signal Process. Lett. 2022, 29, 677–681. [Google Scholar] [CrossRef]
- Seow, C.K.; Tan, S.Y. Non-Line-of-Sight Localization in Multipath Environments. IEEE Trans. Mob. Comput. 2008, 7, 778–791. [Google Scholar] [CrossRef]
- Chen, C.-H.; Feng, K.-T.; Chen, C.-L.; Tseng, P.-H. Wireless Location Estimation With the Assistance of Virtual Base Stations. IEEE Trans. Veh. Technol. 2009, 58, 93–106. [Google Scholar] [CrossRef]
- Liu, D.; Liu, K.; Ma, Y.; Yu, J. Joint TOA and DOA Localization in Indoor Environment Using Virtual Stations. IEEE Commun. Lett. 2014, 18, 1423–1426. [Google Scholar] [CrossRef]
- Jiang, S.; Wang, W.; Peng, P. A Single-Site Vehicle Positioning Method in the Rectangular Tunnel Environment. Remote Sens. 2023, 15, 527. [Google Scholar] [CrossRef]
- Liang, J.; He, J.; Yu, W.; Truong, T.-K. Single-Site 3-D Positioning in Multipath Environments Using DOA-Delay Measurements. IEEE Commun. Lett. 2021, 25, 2559–2563. [Google Scholar] [CrossRef]
- Shamsian, M.R.; Sadeghi, M.; Behnia, F. Joint TDOA and DOA Single Site Localization in NLOS Environment Using Virtual Stations. IEEE Trans. Instrum. Meas. 2024, 73, 5500710. [Google Scholar] [CrossRef]
- Yun, Z.; Iskander, M.F. Ray Tracing for Radio Propagation Modeling: Principles and Applications. IEEE Access 2015, 3, 1089–1100. [Google Scholar] [CrossRef]
- Liu, Z.; Zhao, P.; Guo, L.; Nan, Z.; Zhong, Z.; Li, J. Three-Dimensional Ray-Tracing-Based Propagation Prediction Model for Macrocellular Environment at Sub-6 GHz Frequencies. Electronics 2024, 13, 1451. [Google Scholar] [CrossRef]
- Dersch, U.; Zollinger, E. Propagation Mechanisms in Microcell and Indoor Environments. IEEE Trans. Veh. Technol. 1994, 43, 1058–1066. [Google Scholar] [CrossRef]
- Chen, S.-H.; Jeng, S.-K. An SBR/Image Approach for Radio Wave Propagation in Indoor Environments with Metallic Furniture. IEEE Trans. Antennas Propag. 1997, 45, 98–106. [Google Scholar] [CrossRef]
- Liu, Z.-Y.; Guo, L.-X. A Quasi Three-Dimensional Ray Tracing Method Based on the Virtual Source Tree in Urban Microcellular Environments. Pier 2011, 118, 397–414. [Google Scholar] [CrossRef]
- Recommendation ITU-R P.527-6. Electrical Characteristics of the Surface of the Earth. P Ser. Radiowave Propag. 2019. Available online: https://www.itu.int/rec/R-REC-P.527/en (accessed on 9 December 2024).
- Liu, Z.; Guo, L.; Guan, X.; Sun, J. Effects of Urban Microcellular Environments on Ray-Tracing-Based Coverage Predictions. J. Opt. Soc. Am. A 2016, 33, 1738–1746. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Description |
|---|---|
| Carrier frequency | 3 GHz, 3.6 GHz, 4 GHz, 5 GHz, 5.9 GHz |
| Signal constitution | CW |
| Speed of Rx | 5 km/h |
| Transmission power | 38 dBm |
| Tx/Rx antenna | Vertically polarized omnidirectional antenna |
| Tx/Rx antenna gain | 2.7 dB |
| Tx position | (−0.79, 5.656, 1.85) m |
| Route distance | 640 m–700 m |
| Power measurements per second | 20 |
| RTK location records per second | 20 |
| Material | Scenario Part | (S/m) | |
|---|---|---|---|
| Glass | Wall | 9.82 × 10−3 | 6.27 |
| Aluminum | Wall decorations | 3.5 × 107 | 7.6 |
| Concrete | Ground | 5.71 × 10−2 | 5.31 |
| Frequency (GHz) | Mean (dB) | Standard Deviation (dB) | ||
|---|---|---|---|---|
| RT | Proposed RT | RT | Proposed RT | |
| 3.0 | 2.40 | 3.25 | 8.0 | 6.39 |
| 3.6 | 3.38 | −1.72 | 8.94 | 7.37 |
| 4.0 | 1.82 | 0.89 | 9.05 | 7.72 |
| 5.0 | −2.62 | 0.61 | 8.93 | 6.84 |
| 5.9 | −3.89 | 2.8 | 8.53 | 7.27 |
| Index | T1 | T2 | T3 | |||
|---|---|---|---|---|---|---|
| AOA | RSSD | AOA | RSSD | AOA | RSSD | |
| 1 | 129° | 0 dB | 90° | 0 dB | 126° | 0 dB |
| 2 | 38° | −3.4 dB | 42° | −6.8 dB | 148° | −22.3 dB |
| 3 | 123° | −6.6 dB | 51° | −26.3 dB | 79° | −23.5 dB |
| 4 | 50° | −17.1 dB | 161° | −33.7 dB | 229° | −26.3 dB |
| 5 | 126° | −25.3 dB | - | - | - | - |
| Source Name | AS Measured | AS Simulated | Absolute Error |
|---|---|---|---|
| T1 | 40.24° | 42.82° | 2.58° |
| T2 | 18.23° | 21.62° | 3.39° |
| T3 | 6.09° | 3.56° | 2.53° |
| Source Name | Position Measured | Position Estimated | Absolute Error |
|---|---|---|---|
| T1 | (29.44, 83.94) m | (30.04, 83.69) m | 0.64 m |
| T2 | (28.25, 102.92) m | (28.44, 103.24) m | 0.37 m |
| T3 | (26.21, 137.33) m | (25.25, 122.85) m | 1.07 m |
| AOA Error | Mean Error | Localization Error Rate (<10 m) | ||
|---|---|---|---|---|
| Original | with MSDM | Original | with MSDM | |
| 0.1° | 0.367 m | 0.234 m | 99.36% | 99.82% |
| 0.5° | 1.120 m | 0.956 m | 98.51% | 99.19% |
| 1.0° | 2.053 m | 1.840 m | 96.81% | 97.88% |
| 2.0° | 4.032 m | 3.495 m | 92.71% | 94.17% |
| 4.0° | 7.670 m | 6.950 m | 81.54% | 83.38% |
| 6.0° | 11.036 m | 9.780 m | 71.16% | 74.08% |
| Acceleration Type | Time Consumed | Speed Up |
|---|---|---|
| CPU Single Thread | 1,214,122.13 s | 1× |
| CPU Multi-Thread | 190,899.7 s | 6.4× |
| GPU | 251.08 s | 4835.6× |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, S.; Guo, L.; Liu, Z. A Ray-Tracing-Based Single-Site Localization Method for Non-Line-of-Sight Environments. Sensors 2024, 24, 7925. https://doi.org/10.3390/s24247925
Hu S, Guo L, Liu Z. A Ray-Tracing-Based Single-Site Localization Method for Non-Line-of-Sight Environments. Sensors. 2024; 24(24):7925. https://doi.org/10.3390/s24247925
Chicago/Turabian StyleHu, Shuo, Lixin Guo, and Zhongyu Liu. 2024. "A Ray-Tracing-Based Single-Site Localization Method for Non-Line-of-Sight Environments" Sensors 24, no. 24: 7925. https://doi.org/10.3390/s24247925
APA StyleHu, S., Guo, L., & Liu, Z. (2024). A Ray-Tracing-Based Single-Site Localization Method for Non-Line-of-Sight Environments. Sensors, 24(24), 7925. https://doi.org/10.3390/s24247925