
Enhancing Intelligent Shoes with Gait Analysis: A Review on the Spatiotemporal Estimation Techniques




Abstract
1. Introduction
2. Human Gait Analysis
- Initial Contact: The heel just touches the floor, and the joint postures determine the limb’s loading response pattern.
- Loading Response: Body weight transfers to the forward limb, marking the start of the double-stance phase until the other foot lifts.
- Mid-Stance: The first half of single limb support, beginning when the other foot lifts and bodyweight aligned over the forefoot.
- Terminal Stance: Completes the single-limb support, beginning with heel rise ending with opposite foot striking the ground.
- Pre-Swing: The second double-stance interval in the gait cycle, starting with the opposite foot’s initial contact and ends with the ipsilateral toe-off, thus positioning the limb for swing.
- Initial Swing: Begins when the foot lifts off the ground and ends when the foot is opposite to the stance foot, accounting for one third of the swing period.
- Mid-Swing: The second swing phase, starting when the foot is opposite the stance foot and ending when the tibia is vertical.
- Terminal Swing: Completes the limb advancement, beginning with a vertical tibia and ends when foot strikes the floor (see Figure 1).
3. Wearable Sensors for Gait Analysis
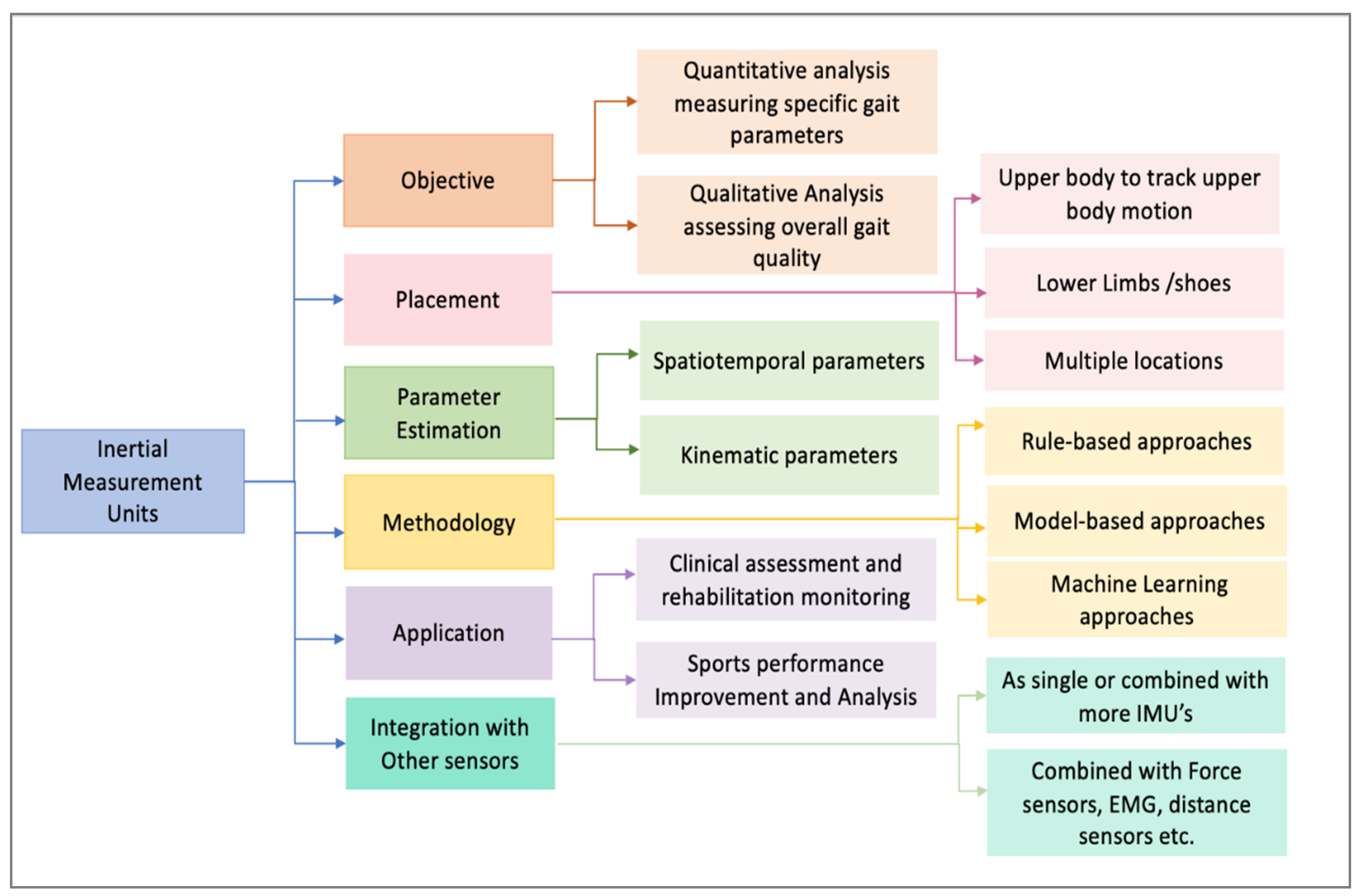
4. Inertial Measurement Units
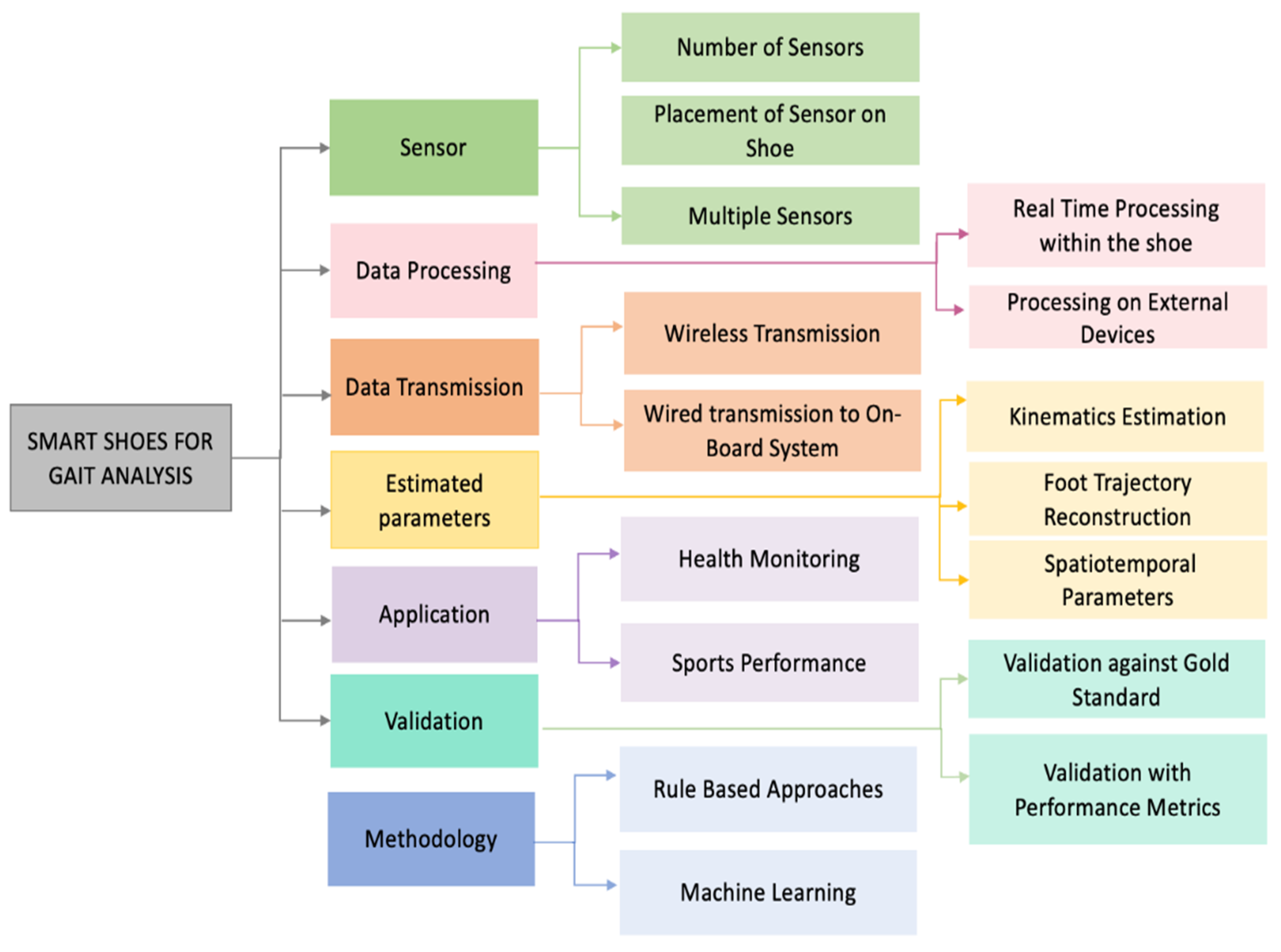
5. Smart Shoes for Gait Analysis
- Smart shoes have a predefined, rigid sensor position on the foot, providing accurate, repeatable and flexible biomechanical analysis.
- Smart shoes can be used to monitor gait, which is a highly stereotyped movement that enables the automated assessment of functional biomechanics; and
- Smart shoes enable a non-obtrusive and non-stigmatizing integration of technology, ultimately improving user acceptance and long-term adherence [81].
6. IMU Applications on Shoe: Position, Trajectory, and Spatiotemporal Estimation
- Position Estimation: Determining the location of a person relative to a fixed frame of reference. It involves estimating the movements and spatial coordinates of the person in a given environment or scenario [84].
- Spatiotemporal Estimation: Encompasses both spatial (distance, position) and temporal (time-related) aspects of human movement using IMU data. Step length, step width, along with parameters such as stride duration, cadence, stance phase, swing phase, and gait velocity, collectively fall under spatiotemporal estimation [10,21,22,26,27].
6.1. Data Processing
6.1.1. Preprocessing
6.1.2. Gait Segmentation
6.1.3. Orientation Estimation
6.1.4. Velocity and Position Estimation
6.1.5. Dedrifting
6.1.6. Machine Learning for Spatiotemporal Estimation
6.2. Evaluation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hegde, N.; Bries, M.; Sazonov, E. A Comparative Review of Footwear-Based Wearable Systems. Electronics 2016, 5, 48. [Google Scholar] [CrossRef]
- Argañarás, J.G.; Wong, Y.T.; Begg, R.; Karmakar, N.C. State-of-the-art wearable sensors and possibilities for radar in fall prevention. Sensors 2021, 21, 6836. [Google Scholar] [CrossRef] [PubMed]
- Carse, B.; Meadows, B.; Bowers, R.; Rowe, P. Affordable clinical gait analysis: An assessment of the marker tracking accuracy of a new low-cost optical 3D motion analysis system. Physiotherapy 2013, 99, 347–351. [Google Scholar] [CrossRef] [PubMed]
- Henmi, S.; Yonenobu, K.; Masatomi, T.; Oda, K. A biomechanical study of activities of daily living using neck and upper limbs with an optical three-dimensional motion analysis system. Mod. Rheumatol. 2006, 16, 289–293. [Google Scholar] [CrossRef] [PubMed]
- Karaulova, I.A.; Hall, P.M.; Marshall, A.D. Tracking people in three dimensions using a hierarchical model of dynamics. Image Vis. Comput. 2002, 20, 691–700. [Google Scholar] [CrossRef]
- Guimarães, V.; Sousa, I.; Correia, M.V. Gait events detection from heel and toe trajectories: Comparison of methods using multiple datasets. In Proceedings of the 2021 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Lausanne, Switzerland, 23–25 June 2021; pp. 1–6. [Google Scholar]
- Mason, R.; Pearson, L.T.; Barry, G.; Young, F.; Lennon, O.; Godfrey, A.; Stuart, S. Wearables for Running Gait Analysis: A Systematic Review. Sports Med. 2023, 53, 241–268. [Google Scholar] [CrossRef]
- Tao, W.; Liu, T.; Zheng, R.; Feng, H. Gait Analysis Using Wearable Sensors. Sensors 2012, 12, 2255–2283. [Google Scholar] [CrossRef]
- Laidig, D.; Jocham, A.J.; Guggenberger, B.; Adamer, K.; Fischer, M.; Seel, T. Calibration-free gait assessment by foot-worn inertial sensors. Front. Digit. Health 2021, 3, 736418. [Google Scholar] [CrossRef]
- Jocham, A.J.; Laidig, D.; Guggenberger, B.; Seel, T. Measuring highly accurate foot position and angle trajectories with foot-mounted IMUs in clinical practice. Gait Posture 2024, 108, 63–69. [Google Scholar] [CrossRef]
- Wei, W.; Kurita, K.; Kuang, J.; Gao, A. Real-Time Limb Motion Tracking with a Single IMU Sensor for Physical Therapy Exercises. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Mexico, 1–5 November 2021; pp. 7152–7157. [Google Scholar]
- Suh, Y.S. Inertial sensor-based smoother for gait analysis. Sensors 2014, 14, 24338–24357. [Google Scholar] [CrossRef]
- López-Nava, I.H.; Muñoz-Meléndez, A. Wearable Inertial Sensors for Human Motion Analysis: A Review. IEEE Sens. J. 2016, 16, 7821–7834. [Google Scholar] [CrossRef]
- Beravs, T.; Reberšek, P.; Novak, D.; Podobnik, J.; Munih, M. Development and validation of a wearable inertial measurement system for use with lower limb exoskeletons. In Proceedings of the 2011 11th IEEE-RAS International Conference on Humanoid Robots, Bled, Slovenia, 26–28 October 2011; pp. 212–217. [Google Scholar]
- Benoussaad, M.; Sijobert, B.; Mombaur, K.; Azevedo Coste, C. Robust Foot Clearance Estimation Based on the Integration of Foot-Mounted IMU Acceleration Data. Sensors 2016, 16, 12. [Google Scholar] [CrossRef] [PubMed]
- Pacini Panebianco, G.; Bisi, M.C.; Stagni, R.; Fantozzi, S. Analysis of the performance of 17 algorithms from a systematic review: Influence of sensor position, analysed variable and computational approach in gait timing estimation from IMU measurements. Gait Posture 2018, 66, 76–82. [Google Scholar] [CrossRef] [PubMed]
- Patterson, M.R.; Johnston, W.; Mahony, N.O.; Mahony, S.O.; Nolan, E.; Caulfield, B. Validation of temporal gait metrics from three IMU locations to the gold standard force plate. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 667–671. [Google Scholar]
- Lindemann, U. Spatiotemporal gait analysis of older persons in clinical practice and research. Z. Für Gerontol. Geriatr. 2020, 53, 171–178. [Google Scholar] [CrossRef] [PubMed]
- Hamacher, D.; Hamacher, D.; Schega, L. Towards the importance of minimum toe clearance in level ground walking in a healthy elderly population. Gait Posture 2014, 40, 727–729. [Google Scholar] [CrossRef]
- Begg, R.; Best, R.; Dell’Oro, L.A.; Taylor, S. Minimum foot clearance during walking: Strategies for the minimisation of trip-related falls. Gait Posture 2007, 25, 191–198. [Google Scholar] [CrossRef]
- Tunca, C.; Pehlivan, N.; Ak, N.; Arnrich, B.; Salur, G.; Ersoy, C. Inertial Sensor-Based Robust Gait Analysis in Non-Hospital Settings for Neurological Disorders. Sensors 2017, 17, 825. [Google Scholar] [CrossRef]
- Mariani, B.; Hoskovec, C.; Rochat, S.; Büla, C.; Penders, J.; Aminian, K. 3D gait assessment in young and elderly subjects using foot-worn inertial sensors. J. Biomech. 2010, 43, 2999–3006. [Google Scholar] [CrossRef]
- Tao, S.; Zhang, X.; Cai, H.; Lv, Z.; Hu, C.; Xie, H. Gait based biometric personal authentication by using MEMS inertial sensors. J. Ambient. Intell. Humaniz. Comput. 2018, 9, 1705–1712. [Google Scholar] [CrossRef]
- Jacob, S.; Fernie, G.; Fekr, A.R. Design of a Novel Wearable System for Foot Clearance Estimation. Sensors 2021, 21, 7891. [Google Scholar] [CrossRef]
- Mariani, B.; Rochat, S.; Büla, C.J.; Aminian, K. Heel and Toe Clearance Estimation for Gait Analysis Using Wireless Inertial Sensors. IEEE Trans. Biomed. Eng. 2012, 59, 3162–3168. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Kuruvithadam, K.; Schaer, A.; Stoneham, R.; Chatzipirpiridis, G.; Easthope, C.A.; Barry, G.; Martin, J.; Pané, S.; Nelson, B.J.; et al. An intelligent in-shoe system for gait monitoring and analysis with optimized sampling and real-time visualization capabilities. Sensors 2021, 21, 2869. [Google Scholar] [CrossRef] [PubMed]
- Fukushi, K.; Huang, C.; Wang, Z.; Kajitani, H.; Nihey, F.; Nakahara, K. On-Line Algorithms of Stride-Parameter Estimation for in-Shoe Motion-Sensor System. IEEE Sens. J. 2022, 22, 9636–9648. [Google Scholar] [CrossRef]
- Santhiranayagam, B.K.; Lai, D.T.H.; Sparrow, W.A.; Begg, R.K. A machine learning approach to estimate Minimum Toe Clearance using Inertial Measurement Units. J. Biomech. 2015, 48, 4309–4316. [Google Scholar] [CrossRef] [PubMed]
- Perry, J.; Burnfield, J.M. Gait analysis: Normal and pathological function. J. Sports Sci. Med. 2010, 9, 353. [Google Scholar]
- Kharb, A.; Saini, V.; Jain, Y.; Dhiman, S. A review of gait cycle and its parameters. IJCEM Int. J. Comput. Eng. Manag. 2011, 13, 78–83. [Google Scholar]
- Vu, H.T.T.; Dong, D.; Cao, H.-L.; Verstraten, T.; Lefeber, D.; Vanderborght, B.; Geeroms, J. A Review of Gait Phase Detection Algorithms for Lower Limb Prostheses. Sensors 2020, 20, 3972. [Google Scholar] [CrossRef]
- Di Gregorio, R.; Vocenas, L. Identification of Gait-Cycle Phases for Prosthesis Control. Biomimetics 2021, 6, 22. [Google Scholar] [CrossRef]
- Mustapha, B.; Zayegh, A.; Begg, R.K. Ultrasonic and infrared sensors performance in a wireless obstacle detection system. In Proceedings of the 2013 1st International Conference on Artificial Intelligence, Modelling and Simulation, Kota Kinabalu, Malaysia, 3–5 December 2013; pp. 487–492. [Google Scholar]
- Hausdorff, J.M.; Rios, D.A.; Edelberg, H.K. Gait variability and fall risk in community-living older adults: A 1-year prospective study. Arch. Phys. Med. Rehabil. 2001, 82, 1050–1056. [Google Scholar] [CrossRef]
- Maki, B.E. Gait changes in older adults: Predictors of falls or indicators of fear? J. Am. Geriatr. Soc. 1997, 45, 313–320. [Google Scholar] [CrossRef]
- Srivises, W.; Nilkhamhang, I.; Tungpimolrut, K. Design of a smart shoe for reliable gait analysis using state transition theory. In Proceedings of the 2012 9th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology, Phetchaburi, Thailand, 16–18 May 2012; pp. 1–4. [Google Scholar]
- Best, R.; Begg, R. A method for calculating the probability of tripping while walking. J. Biomech. 2008, 41, 1147–1151. [Google Scholar] [CrossRef] [PubMed]
- Lamine, H.; Bennour, S.; Laribi, M.; Romdhane, L.; Zaghloul, S. Evaluation of calibrated kinect gait kinematics using a vicon motion capture system. Comput. Methods Biomech. Biomed. Eng. 2017, 20, S111–S112. [Google Scholar] [CrossRef] [PubMed]
- Lai, D.T.; Taylor, S.B.; Begg, R.K. Prediction of foot clearance parameters as a precursor to forecasting the risk of tripping and falling. Hum. Mov. Sci. 2012, 31, 271–283. [Google Scholar] [CrossRef] [PubMed]
- Baskwill, A.J.; Belli, P.; Kelleher, L. Evaluation of a gait assessment module using 3D motion capture technology. Int. J. Ther. Massage Bodyw. 2017, 10, 3. [Google Scholar]
- Dadashi, F.; Mariani, B.; Rochat, S.; Büla, C.J.; Santos-Eggimann, B.; Aminian, K. Gait and Foot Clearance Parameters Obtained Using Shoe-Worn Inertial Sensors in a Large-Population Sample of Older Adults. Sensors 2014, 14, 443–457. [Google Scholar] [CrossRef]
- Mills, P.; Barrett, R. Swing phase mechanics of healthy young and elderly men. Hum. Mov. Sci. 2001, 20, 427–446. [Google Scholar] [CrossRef]
- Singh, Y.; Kher, M.; Vashista, V. Intention Detection and Gait Recognition (IDGR) System for Gait Assessment: A Pilot Study. In Proceedings of the 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019; pp. 1–6. [Google Scholar]
- Park, S.; Park, F.C.; Choi, J.; Kim, H. EEG-based Gait State and Gait Intention Recognition Using Spatio-Spectral Convolutional Neural Network. In Proceedings of the 2019 7th International Winter Conference on Brain-Computer Interface (BCI), Gangwon, Republic of Korea, 18–20 February 2019; pp. 1–3. [Google Scholar]
- Begg, R.; Lai, D.; Taylor, S.; Palaniswami, M. SVM Models in the Diagnosis of Balance Impairments. In Proceedings of the 2005 3rd International Conference on Intelligent Sensing and Information Processing, Bangalore, India, 14–17 December 2005; pp. 248–253. [Google Scholar]
- Khandoker, A.; Lai, D.; Begg, R.; Palaniswami, M. Wavelet-Based Feature Extraction for Support Vector Machines for Screening Balance Impairments in the Elderly. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 15, 587–597. [Google Scholar] [CrossRef]
- Lai, D.; Begg, R.K.; Taylor, S.; Palaniswami, M. Detection of tripping gait patterns in the elderly using autoregressive features and support vector machines. J. Biomech. 2008, 41, 1762–1772. [Google Scholar] [CrossRef]
- Caldas, R.; Mundt, M.; Potthast, W.; de Lima Neto, F.B.; Markert, B. A systematic review of gait analysis methods based on inertial sensors and adaptive algorithms. Gait Posture 2017, 57, 204–210. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, Z.; Dong, T. A Review of Wearable Technologies for Elderly Care that Can Accurately Track Indoor Position, Recognize Physical Activities and Monitor Vital Signs in Real Time. Sensors 2017, 17, 341. [Google Scholar] [CrossRef]
- Zhou, H.; Hu, H. Human motion tracking for rehabilitation—A survey. Biomed. Signal Process. Control. 2008, 3, 1–18. [Google Scholar] [CrossRef]
- Prasanth, H.; Caban, M.; Keller, U.; Courtine, G.; Ijspeert, A.; Vallery, H.; von Zitzewitz, J. Wearable Sensor-Based Real-Time Gait Detection: A Systematic Review. Sensors 2021, 21, 2727. [Google Scholar] [CrossRef] [PubMed]
- Ishida, T.; Samukawa, M. Validity and Reliability of a Wearable Goniometer Sensor Controlled by a Mobile Application for Measuring Knee Flexion/Extension Angle during the Gait Cycle. Sensors 2023, 23, 3266. [Google Scholar] [CrossRef] [PubMed]
- Taborri, J.; Palermo, E.; Rossi, S.; Cappa, P. Gait Partitioning Methods: A Systematic Review. Sensors 2016, 16, 66. [Google Scholar] [CrossRef]
- Bamberg, S.J.M.; Benbasat, A.Y.; Scarborough, D.M.; Krebs, D.E.; Paradiso, J.A. Gait Analysis Using a Shoe-Integrated Wireless Sensor System. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 413–423. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, Y.; Nie, J.; Yu, Y. Estimation of Continous Heel and Toe Clearances Using Foot-Worn Inertial Sensors. In Proceedings of the 2019 12th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics, CISP-BMEI, Suzhou, China, 19–21 October 2019. [Google Scholar]
- Sabatini, A.M. Estimating Three-Dimensional Orientation of Human Body Parts by Inertial/Magnetic Sensing. Sensors 2011, 11, 1489–1525. [Google Scholar] [CrossRef]
- Pérez-Ibarra, J.C.; Williams, H.; Siqueira, A.A.G.; Krebs, H.I. Real-Time Identification of Impaired Gait Phases Using a Single Foot-Mounted Inertial Sensor: Review and Feasibility Study. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; pp. 1157–1162. [Google Scholar]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends Supporting the In-Field Use of Wearable Inertial Sensors for Sport Performance Evaluation: A Systematic Review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef]
- Wang, L.; Sun, Y.; Li, Q.; Liu, T.; Yi, J. IMU-Based Gait Normalcy Index Calculation for Clinical Evaluation of Impaired Gait. IEEE J. Biomed. Health Inform. 2021, 25, 3–12. [Google Scholar] [CrossRef]
- Manupibul, U.; Tanthuwapathom, R.; Jarumethitanont, W.; Kaimuk, P.; Limroongreungrat, W.; Charoensuk, W. Integration of force and IMU sensors for developing low-cost portable gait measurement system in lower extremities. Sci. Rep. 2023, 13, 10653. [Google Scholar] [CrossRef]
- Yu, G.; Jang, Y.J.; Kim, J.; Kim, J.H.; Kim, H.Y.; Kim, K.; Panday, S.B. Potential of IMU Sensors in Performance Analysis of Professional Alpine Skiers. Sensors 2016, 16, 463. [Google Scholar] [CrossRef]
- Gujarathi, T.; Bhole, K. Gait Analysis Using Imu Sensor. In Proceedings of the 2019 10th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kanpur, India, 6–8 July 2019; pp. 1–5. [Google Scholar]
- Liu, T.; Inoue, Y.; Shibata, K. Development of a wearable sensor system for quantitative gait analysis. Measurement 2009, 42, 978–988. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, Z.; Qiu, S.; Shen, Y.; Wang, J. IMU-based gait analysis for rehabilitation assessment of patients with gait disorders. In Proceedings of the 2017 4th International Conference on Systems and Informatics (ICSAI), Hangzhou, China, 11–13 November 2017; pp. 622–626. [Google Scholar]
- Lou, Y.; Wang, R.; Mai, J.; Wang, N.; Wang, Q. IMU-Based Gait Phase Recognition for Stroke Survivors. Robotica 2019, 37, 2195–2208. [Google Scholar] [CrossRef]
- García-de-Villa, S.; Ruiz, L.R.; Neira, G.G.V.; Álvarez, M.N.; Huertas-Hoyas, E.; del-Ama, A.J.; Rodríguez-Sánchez, M.C.; Seco, F.; Jiménez, A.R. Validation of an IMU-based Gait Analysis Method for Assessment of Fall Risk Against Traditional Methods. IEEE J. Biomed. Health Inform. 2024, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Ferrari, A.; Ginis, P.; Hardegger, M.; Casamassima, F.; Rocchi, L.; Chiari, L. A mobile Kalman-filter based solution for the real-time estimation of spatio-temporal gait parameters. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 24, 764–773. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Zhao, C.; Zheng, B.; Guo, Q.; Duan, X.; Wulamu, A.; Zhang, D. Wearable devices for gait analysis in intelligent healthcare. Front. Comput. Sci. 2021, 3, 661676. [Google Scholar] [CrossRef]
- Findlow, A.; Goulermas, J.Y.; Nester, C.; Howard, D.; Kenney, L.P.J. Predicting lower limb joint kinematics using wearable motion sensors. Gait Posture 2008, 28, 120–126. [Google Scholar] [CrossRef]
- Suzuki, Y.; Hahn, M.E.; Enomoto, Y. Estimation of Foot Trajectory and Stride Length during Level Ground Running Using Foot-Mounted Inertial Measurement Units. Sensors 2022, 22, 7129. [Google Scholar] [CrossRef]
- Gouwanda, D.; Gopalai, A.A.; Khoo, B.H. A Low Cost Alternative to Monitor Human Gait Temporal Parameters–Wearable Wireless Gyroscope. IEEE Sens. J. 2016, 16, 9029–9035. [Google Scholar] [CrossRef]
- Hao, M.; Chen, K.; Fu, C. Smoother-Based 3-D Foot Trajectory Estimation Using Inertial Sensors. IEEE Trans. Biomed. Eng. 2019, 66, 3534–3542. [Google Scholar] [CrossRef]
- Li, F.; Liu, G.; Liu, J.; Chen, X.; Ma, X. 3D tracking via shoe sensing. Sensors 2016, 16, 1809. [Google Scholar] [CrossRef]
- Guimarães, V.; Sousa, I.; Correia, M.V. A Deep Learning Approach for Foot Trajectory Estimation in Gait Analysis Using Inertial Sensors. Sensors 2021, 21, 7517. [Google Scholar] [CrossRef] [PubMed]
- Romijnders, R.; Warmerdam, E.; Hansen, C.; Schmidt, G.; Maetzler, W. A Deep Learning Approach for Gait Event Detection from a Single Shank-Worn IMU: Validation in Healthy and Neurological Cohorts. Sensors 2022, 22, 3859. [Google Scholar] [CrossRef] [PubMed]
- Gonçalves, H.R.; Moreira, R.; Rodrigues, A.; Minas, G.; Reis, L.P.; Santos, C.P. Real-time tool for human gait detection from lower trunk acceleration. In Trends and Advances in Information Systems and Technologies; WorldCIST’18 2018. Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2018; Volume 747. [Google Scholar] [CrossRef]
- Carbonaro, N.; Lorussi, F.; Tognetti, A. Assessment of a smart sensing shoe for gait phase detection in level walking. Electronics 2016, 5, 78. [Google Scholar] [CrossRef]
- Pham, C.; Diep, N.N.; Phuong, T.M. e-Shoes: Smart shoes for unobtrusive human activity recognition. In Proceedings of the 2017 9th International Conference on Knowledge and Systems Engineering (KSE), Hue, Vietnam, 19–21 October 2017; pp. 269–274. [Google Scholar]
- Fulk, G.D.; Edgar, S.R.; Bierwirth, R.; Hart, P.; Lopez-Meyer, P.; Sazonov, E. Identifying activity levels and steps of people with stroke using a novel shoe-based sensor. J. Neurol. Phys. Ther. 2012, 36, 100–107. [Google Scholar] [CrossRef] [PubMed]
- Kyoungchul, K.; Joonbum, B.; Masayoshi, T. Detection of abnormalities in a human gait using smart shoes. In Proceedings of the SPIE Smart Structures and Materials + Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 8 April 2008. [Google Scholar]
- Eskofier, B.; Lee, S.; Baron, M.; Simon, A.; Martindale, C.; Gaßner, H.; Klucken, J. An Overview of Smart Shoes in the Internet of Health Things: Gait and Mobility Assessment in Health Promotion and Disease Monitoring. Appl. Sci. 2017, 7, 986. [Google Scholar] [CrossRef]
- Sprager, S.; Juric, M.B. Inertial Sensor-Based Gait Recognition: A Review. Sensors 2015, 15, 22089–22127. [Google Scholar] [CrossRef]
- Kanzler, C.M.; Barth, J.; Rampp, A.; Schlarb, H.; Rott, F.; Klucken, J.; Eskofier, B.M. Inertial sensor based and shoe size independent gait analysis including heel and toe clearance estimation. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 5424–5427. [Google Scholar]
- Park, S.K.; Suh, Y.S. A Zero Velocity Detection Algorithm Using Inertial Sensors for Pedestrian Navigation Systems. Sensors 2010, 10, 9163–9178. [Google Scholar] [CrossRef]
- Kitagawa, N.; Ogihara, N. Estimation of foot trajectory during human walking by a wearable inertial measurement unit mounted to the foot. Gait Posture 2016, 45, 110–114. [Google Scholar] [CrossRef]
- Nguyen, L.V.; La, H.M. Real-Time Human Foot Motion Localization Algorithm with Dynamic Speed. IEEE Trans. Hum.-Mach. Syst. 2016, 46, 822–833. [Google Scholar] [CrossRef]
- Guimarães, V.; Sousa, I.; Correia, M.V. Orientation-Invariant Spatio-Temporal Gait Analysis Using Foot-Worn Inertial Sensors. Sensors 2021, 21, 3940. [Google Scholar] [CrossRef]
- Merat, P.; Harvey, E.J.; Mitsis, G.D. A Miniature Multi-sensor Shoe-Mounted Platform for Accurate Positioning. In Proceedings of the 2018 IEEE International Conference on Systems, Man, and Cybernetics, SMC, Miyazaki, Japan, 7–10 October 2018; pp. 2772–2777. [Google Scholar]
- Caruso, M.; Sabatini, A.M.; Laidig, D.; Seel, T.; Knaflitz, M.; Della Croce, U.; Cereatti, A. Analysis of the Accuracy of Ten Algorithms for Orientation Estimation Using Inertial and Magnetic Sensing under Optimal Conditions: One Size Does Not Fit All. Sensors 2021, 21, 2543. [Google Scholar] [CrossRef] [PubMed]
- Valenti, R.G.; Dryanovski, I.; Xiao, J. Keeping a Good Attitude: A Quaternion-Based Orientation Filter for IMUs and MARGs. Sensors 2015, 15, 19302–19330. [Google Scholar] [CrossRef] [PubMed]
- Zrenner, M.; Gradl, S.; Jensen, U.; Ullrich, M.; Eskofier, B.M. Comparison of different algorithms for calculating velocity and stride length in running using inertial measurement units. Sensors 2018, 18, 4194. [Google Scholar] [CrossRef] [PubMed]
- Alaqtash, M.; Sarkodie-Gyan, T.; Yu, H.; Fuentes, O.; Brower, R.; Abdelgawad, A. Automatic classification of pathological gait patterns using ground reaction forces and machine learning algorithms. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 453–457. [Google Scholar]
- Shetty, S.; Rao, Y.S. SVM based machine learning approach to identify Parkinson’s disease using gait analysis. In Proceedings of the 2016 International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–27 August 2016; pp. 1–5. [Google Scholar]
- Slijepcevic, D.; Zeppelzauer, M.; Gorgas, A.; Schwab, C.; Schüller, M.; Baca, A.; Breiteneder, C.; Horsak, B. Automatic Classification of Functional Gait Disorders. IEEE J. Biomed. Health Inform. 2018, 22, 1653–1661. [Google Scholar] [CrossRef] [PubMed]
- Derlatka, M.; Ihnatouski, M. Decision Tree Approach to Rules Extraction for Human Gait Analysis. In Artificial Intelligence and Soft Computing; Springer: Berlin/Heidelberg, Germany, 2010; pp. 597–604. [Google Scholar] [CrossRef]
- Santhiranayagam, B.K.; Lai, D.; Begg, R. Support vector machines for young and older gait classification using inertial sensor kinematics at minimum toe clearance. EAI Endorsed Trans. Pervasive Health Technol. 2015, 2, e2. [Google Scholar] [CrossRef]
- Martinez-Hernandez, U.; Mahmood, I.; Dehghani-Sanij, A.A. Simultaneous Bayesian Recognition of Locomotion and Gait Phases with Wearable Sensors. IEEE Sens. J. 2018, 18, 1282–1290. [Google Scholar] [CrossRef]
- Lee, M.; Roan, M.; Smith, B.; Lockhart, T.E. Gait analysis to classify external load conditions using linear discriminant analysis. Hum. Mov. Sci. 2009, 28, 226–235. [Google Scholar] [CrossRef]
- Derlatka, M.; Bogdan, M. Ensemble kNN classifiers for human gait recognition based on ground reaction forces. In Proceedings of the 2015 8th International Conference on Human System Interaction (HSI), Warsaw, Poland, 25–27 June 2015; pp. 88–93. [Google Scholar]
- Lempereur, M.; Rousseau, F.; Rémy-Néris, O.; Pons, C.; Houx, L.; Quellec, G.; Brochard, S. A new deep learning-based method for the detection of gait events in children with gait disorders: Proof-of-concept and concurrent validity. J. Biomech. 2020, 98, 109490. [Google Scholar] [CrossRef]
- Su, B.; Smith, C.; Farewik, E.G. Gait Phase Recognition Using Deep Convolutional Neural Network with Inertial Measurement Units. Biosensors 2020, 10, 109. [Google Scholar] [CrossRef]
- Prakash, C.; Kumar, R.; Mittal, N. Recent developments in human gait research: Parameters, approaches, applications, machine learning techniques, datasets and challenges. Artif. Intell. Rev. 2018, 49, 1–40. [Google Scholar] [CrossRef]
- Alfayeed, S.M.; Saini, B.S. Human Gait Analysis Using Machine Learning: A Review. In Proceedings of the 2021 International Conference on Computational Intelligence and Knowledge Economy (ICCIKE), Dubai, United Arab Emirates, 17–18 March 2021; pp. 550–554. [Google Scholar]
- Saboor, A.; Kask, T.; Kuusik, A.; Alam, M.M.; Moullec, Y.L.; Niazi, I.K.; Zoha, A.; Ahmad, R. Latest Research Trends in Gait Analysis Using Wearable Sensors and Machine Learning: A Systematic Review. IEEE Access 2020, 8, 167830–167864. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 S—sense module attached to shoe [22] | Sensor: Six-axis inertial measurement unit Sensor Location: Hind-foot position Functionality:
|
 Nushu System [26] | Sensor: Inertial Measurement Unit (IMU) Sensor Location: Posterior portion of the outsoles Functionality:
|
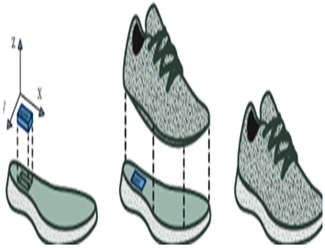
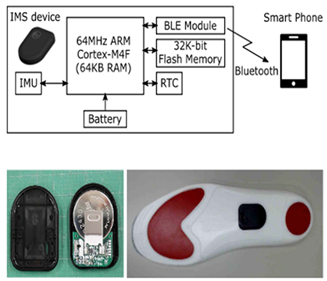 In-Shoe Motion Sensor System [27] | Sensor: Inertial Measurement Unit (IMU) Sensor Location: Insole of shoe Processor: Cortex-M4 ultralow-power advanced RISC machine (ARM) processor Functionality:
|
 Minimum Toe Clearance Estimation [28] | Sensor: Inertial Measurement Unit (IMU) Sensor Location: Distal foot Functionality:
|
 Calibration-Free Gait Assessment [9] | Sensor: Inertial Measurement Unit (IMU) Sensor Location: Dorsum position of each shoe. Functionality:
|
| Parameters (Self-Selected Pace) | Young (1–7) | Adult | Older Adults (>65) |
|---|---|---|---|
| Walking velocity (m/s) | 0.64–1.14 | 1.30–1.46 | Declines 15% per decade |
| Stride length (m) | 0.23–0.57 | 1.68–1.72 | 1.66–1.70 |
| Step length (m) | 0.20–0.32 | 0.68–0.85 | 0.44–0.60 |
| Stance phase (s) | 0.32–0.54 | 0.62–0.70 | 0.68–0.72 |
| Swing phase (s) | 0.19–0.27 | 0.36–0.40 | 0.42–0.44 |
| Cadence-fast walking (steps/min) | 176–144 | 113–118 | 58–70 |
| Single support (% of stride) | 64.4–65.6 | 60.6–62.0 | 61.7–62.9 |
| Double support (% of stride) | 22.5–23.9 | 21.2–23.8 | 23.4–25.8 |
| Sensor Type | Parameter Measured | Location Attached | Advantages | Disadvantages |
|---|---|---|---|---|
| Foot Switch | Timing of gait events such as heel strike and toe-off | Heel or sole | Low-cost, simple signal conditioning and postprocessing Provides precise timing information for gait events | Limited number of the detectable gait phases, accuracy and reliability depends on the placement of the sensors. Wire connections can decrease the system service life. Force generated in the gait cycle cannot be isolated by the concurrent effects induced by the movement of the center of mass. |
| Insole Pressure Sensor | Pressure distribution of foot | Embedded in insole of shoe | Provides detailed information on foot pressure distribution during walking Can help in assessing foot function and detecting abnormalities in gait. Relatively simple to use and interpret. | May not capture dynamic changes in pressure distribution during walking. Subject to pressure between sensor and the foot, leading to non-zero pressure readings even in swing phase. Short life span. |
| Linear Accelerometer | Acceleration | Shank or thigh for limb movement, Trunk for whole body movement | Measure acceleration, providing information on movement patterns and intensity. Portable and wearable, allowing for natural movement during analysis. | Require calibration and careful placement for accurate measurements. Subject to influence of gravity and sensitive to position and orientation. Limited to measuring acceleration along specific axes, may not capture full-body motion. |
| Gyroscope | Angular Velocity | Shank or thigh | Measure angular velocity, providing information on rotational movement. Less prone to noise and invariant to translation in position. Can be used in combination with accelerometers for more comprehensive motion analysis. | Require calibration and careful placement for accurate measurements. May be sensitive to drift over time, requiring periodic recalibration. |
| Inertial Measurement Units | Acceleration and angular velocity, magnetic field strength | Foot, shank, knee, thigh, pelvis, head, upper limb or other parts for motion analysis | Portable, low energy consumption, low cost, durable, and reliable. Can provide real-time data on acceleration, angular velocity, and orientation. | May require complex calibration procedures for accurate measurements. Limited to measuring motion at the sensor location, which may not capture whole-body movement. Magnetometer is sensitive to external magnetic field. Prone to drift over time. |
| EMG | Muscle activation levels, timing and duration of muscle contractions | Specific muscles of interest | Measure muscle activity during walking, providing insights into muscle function and coordination. Can help in assessing muscle imbalance and gait abnormalities. | Requires skin preparation and placement of electrodes on the skin, which can be uncomfortable and may limit natural movement. Complex data acquisition and processing steps. Sensitive to moisture between skin and sensor. |
| System Name | Number of IMUs | Sensor Location | Algorithm | Estimated Parameters | Results | Validation | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Preprocessing | Gait Segmentation | Orientation Estimation | Displacement Estimation | Drift Correction | Reference System | Participants | |||||
| Measuring Highly Accurate Foot Position And Angle Trajectories, 2024 [10] | 2: One on each shoe | Instep/Dorsum of each shoe | Not used | Threshold | Quaternion-based gyroscope strapdown integration | Double integration of acceleration | Linear dedrifting | Stance duration, swing duration, stride length, walking speed, and cadence | Average RMSE of 0.67° for pitch, 0.63° for roll and 1.17° for yaw. For position trajectories, 0.51 cm for vertical lift and 0.34 cm for lateral shift | Vicon with 16 cameras, participants walking on treadmill | 23 healthy adults |
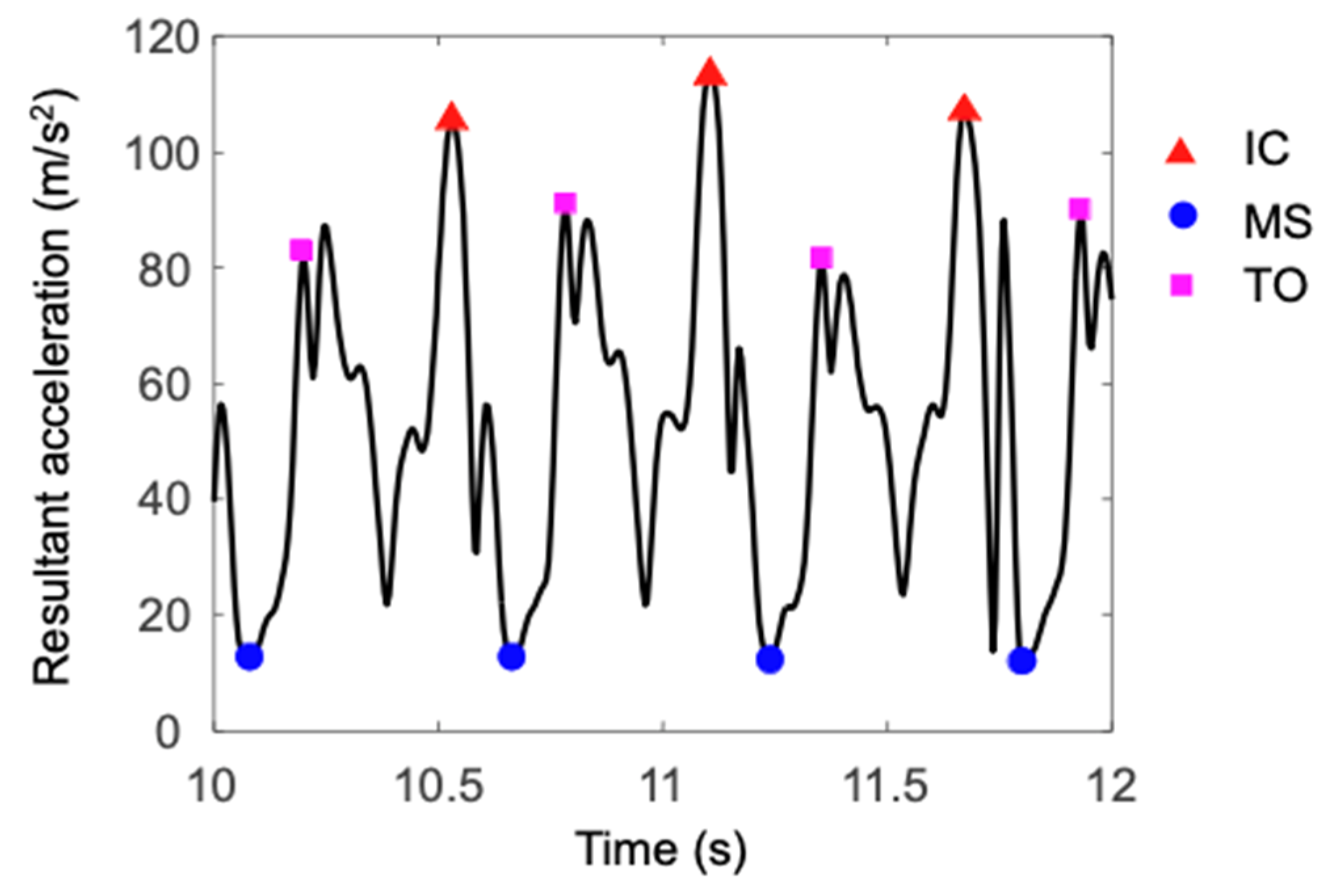
| Running Trajectory Estimation, 2022 [70] | 2: One on each foot | Dorsum of foot | Quintic spline function low-pass filter | Peak detection on resultant acceleration | Quaternion-based gyroscopic strapdown integration | Double integration of acceleration | Spatial error correction (SEC)/linear dedrifting (LD) | Foot trajectory, Stride length | SEC method estimated stride length more accurately compared to the LD method | 16 camera Vicon MX system | 79 runners |
| In-Shoe Motion Sensor System, 2022 [27] | 1 | Insole | Sampling at 100 Hz | Foot-sole angle threshold technique with temporal window | Madgwick filter | Double integration of acceleration | Two rotations | Stride length, walking speed, foot height, circumduction, peak foot Sole angle in the dorsiflexion and plantarflexion directions and toe-in/out angle | RMSE for stride length: 0.069 m, walking speed: 0.094 m/s, foot height: 1.5 cm, circumduction: 1.0 cm, peak foot-sole angle in dorsiflexion: 3.3 deg. and in the plantarflexion directions: 5.9 deg., toe-in/out angle: 2.5 deg | Track 3 (Vicon Motion Systems) with 10 cameras | 30 healthy adults |
| Nushu System, 2021 [26] | 1 | Posterior portion of the outsoles | Anti-aliasing filter | Dynamic thresholds and local peak-identification on angular velocity | Madgwick filter | Double integration of acceleration | ZUPT and linear dedrifting | Stride velocity, stride time, stride length, minimum foot clearance, strike angle, stance time, swing time, stance phase, swing phase, cadence, maximum angular velocity, symmetry, and variability | Percentage mean absolute errors (MAE%) stride time: 1.19%, stride length: 1.68%, stride velocity: 2.08%, cadence: 1.23%, | Vicon motion capture system with 14 cameras | 4 healthy adults |
| Calibration Free Gait shoes, 2021 [9] | One IMU on each foot | Dorsum of shoe | Not mentioned | Automatic adaptive threshold | Quaternion-based gyroscope strapdown integration and moving average filer on acceleration | Double integration of acceleration | ZUPT and linear dedrifting | Swing duration, stance duration, stride length, walking speed, cadence | Mean absolute difference is 1.4% for the gait phase durations, 1.7 cm for the stride length, 0.04 km/h for the walking speed, and 0.7 steps/min for the cadence | Zebris Rehawalk instrumented treadmills (Zebris Medical, Isny, Germany) | 137 (39 healthy, 36 with different neurological diseases, 62 orthopedic diseases) |
| Smoother-Based 3D system, 2019 [72] | One IMU on each foot | Heel of Shoe | Not mentioned | Threshold method | Smoother-based Kalman filter with Euler angle representation | Double integration | Smoother-based correction | Foot trajectory | Accuracy on strid length: −0.24 ± 1.11 cm and on stride width: −0.02 ± 0.95 cm. RMS errors reduction by 62% on stride length and 44% on stride width | Motion analysis, 8 cameras | 9 adults |
| Inertial Sensor Based Robust Gait Analysis, 2017 [21] | One IMU on each foot | Dorsum of foot | Sampling rate of 100 Hz | Threshold on angular velocity | Particle filter | Double integration of acceleration | Error state Kalman filter with Rauch–Tung–Striebel smoother | Stride length, cadence, cycle time, stance time, swing time, stance ratio, speed, maximum/minimum clearance and turning rate | Capture various neurological disorder-related gait abnormalities in a non-hospital setting | Microsoft Kinect depth-camera and a slow-motion camera | 1st phase: 22 (16 healthy) subjects, 2nd phase: 17 subjects with neurological disorder |
| Real-Time Foot Motion with DYNAMIC SPEED, 2016 [86] | 1 | Dorsum of foot | Not mentioned | Dynamic gait phase detection | Extended Kalman filter | Double integration of acceleration | Extended Kalman filter, heuristics heading reduction, zero-velocity update | Foot position, velocity and attitude | Accurately estimate, in real time, the human foot position, velocity, and attitude in dynamic motion speeds. High-accuracy localization both indoors (0.375% errors) and outdoors (0.55% errors) | Motion Analysis Corporation with 16 cameras | Not mentioned |
| 3D Tracking Shoe Sensing, 2016 [73] | 1 | Upper part of shoe | Not mentioned | Threshold on acceleration energy | Quaternion with fourth-order Runge–Kutta method | Double integration of acceleration | Linear error dedrifting | 3D tracking and vertical height estimation | Error Walking: 0.40% Jogging: 0.36% Upstairs: 0.56% Downstairs: 0.88% | Not mentioned | Not mentioned |
| Estimation of Foot Trajectory During Human Walking, 2016 [85] | 1 | Dorsum of foot | Low-pass filter, sampled at 200 Hz | Threshold on angular velocity for a specific time period | Integration of angular velocity | Double integration | Zero displacement correction | Stride length, foot clearance | Mean accuracy and precision 20 ± 50 mm, for stride length, and 2 ± 7 mm for foot clearance | MAC3D System: Motion Analysis Corporation, USA) with 8 cameras | 10 healthy adults |
| Robust Foot Clearance Estimation, 2016 [15] | 2: One on each foot | Ankle joint | Calibration, first-order Butterworth filter | Minimum of angular velocity | 3D gyroscopic integration | Double integration of acceleration | Zero displacement update | Foot clearance | Accurate foot clearance estimation, with normalized root mean square errors (NRMSE) below 15% in 96% of cases, and root mean square (RMS) errors generally below 1.5 cm across various walking conditions | Vicon motion capture | 10 healthy adults |
| Inertial Sensor Based and Shoe Size Independent, 2015 [83] | 2: One IMU on each foot | Lateral ankle | Not mentioned | Subsequence dynamic time wrapping on angular velocity and acceleration | Gyroscopic integration, quaternion representation | Double integration of acceleration | Piecewise cubic Hermite interpolating polynomial | Continuous heel and toe clearance | High correlation and low mean absolute error for both toe clearance (1.69 ± 0.70 cm) and foot angle (2.49 ± 1.21°) | Vicon motion capture with 16 cameras | 20 healthy participants |
| Orientation Invariant Gait Analysis, 2021 [87] | 2: One IMU on each foot | Foot instep | Zero-lag bidirectional 2nd order Butterworth low-pass filter | Zero velocity interval and peak detection | Quaternion representation, tested gyroscope integration, Madgwick filter and Euston filter | Double integration of acceleration | Linear dedrifting, direct and reverse integration | Swing and stance duration, cadence, stride length, stride width, minimum toe clearance | High accuracy, with correlations ranging from 0.78 to 0.98 and relative errors between 1.4% and 7.9% for key gait metrics | Vicon motion capture with 10 cameras | 26 healthy adults |
| Physilog Unit, 2012 [25] | 1 | Upper part of shoes | Low-pass filter | Peak detection | 2D: Integration of pitch 3D: quaternion-based time Integration of the angular velocity | Double integration of acceleration | P-chip linear interpolation | Foot clearance | Accuracy ± precision of 4.1 ± 2.3 cm for maximal heel clearance and 1.3 ± 0.9 cm for minimal toe clearance | Vicon motion capture system with 7 cameras | 12 healthy adults |
| S-Sense, 2010 [22] | 2: One on each shoe | Hind foot | Low-pass filter at 17 Hz, sampled on 12 bits at 200 Hz | Threshold detection on angular velocity | Acceleration-based inclination and azimuth determination | Double integration of acceleration | P-chip linear interpolation | Stride length, stride velocity, foot clearance, and turning angle parameters | Mean accuracy ± precision was 1.5 ± 6.8 cm for stride length, 1.4 ± 5.6 cm/s for stride velocity, 1.9 ± 2.0 cm for foot clearance, and 1.6 ± 6.11 for turning angle | Vicon motion capture | 20 healthy adults |
| Study Name | Significance | Limitations |
|---|---|---|
| Measuring Highly Accurate Foot Position and Angle Trajectories [10] |
|
|
| Running Trajectory Estimation [70] |
|
|
| In-Shoe Motion Sensor System [27] |
|
|
| Nushu System [26] |
|
|
| Calibration Free Gait shoes [9] |
|
|
| Smoother-Based 3D system [72] |
|
|
| Inertial Sensor-Based Robust Gait Analysis [21] |
|
|
| Real-Time Foot Motion with Dynamic Speed [86] |
|
|
| 3D Tracking Shoe Sensing [73] |
|
|
| Estimation of Foot Trajectory During Human Walking [85] |
|
|
| Robust Foot Clearance Estimation [15] |
|
|
| Inertial Sensor-Based and Shoe Size Independent [83] |
|
|
| Orientation Invariant Gait Analysis [87] |
|
|
| Physilog Unit [25] |
|
|
| S-sense [22] |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Joseph, A.M.; Kian, A.; Begg, R. Enhancing Intelligent Shoes with Gait Analysis: A Review on the Spatiotemporal Estimation Techniques. Sensors 2024, 24, 7880. https://doi.org/10.3390/s24247880
Joseph AM, Kian A, Begg R. Enhancing Intelligent Shoes with Gait Analysis: A Review on the Spatiotemporal Estimation Techniques. Sensors. 2024; 24(24):7880. https://doi.org/10.3390/s24247880
Chicago/Turabian StyleJoseph, Anna M., Azadeh Kian, and Rezaul Begg. 2024. "Enhancing Intelligent Shoes with Gait Analysis: A Review on the Spatiotemporal Estimation Techniques" Sensors 24, no. 24: 7880. https://doi.org/10.3390/s24247880
APA StyleJoseph, A. M., Kian, A., & Begg, R. (2024). Enhancing Intelligent Shoes with Gait Analysis: A Review on the Spatiotemporal Estimation Techniques. Sensors, 24(24), 7880. https://doi.org/10.3390/s24247880