
A Parameter-Adaptive Method for Primary Frequency Regulation of Grid-Forming Direct-Drive Wind Turbines


Abstract
1. Introduction
2. The Basic Principle of Wind Turbines Participating in Primary Frequency Regulation and the Control Strategy of Grid-Forming Direct-Drive Wind Turbines
2.1. Dynamic Analysis of the Primary Frequency Regulation Process of Wind Turbines Based on the Rotational Kinetic Energy of a Wind Wheel
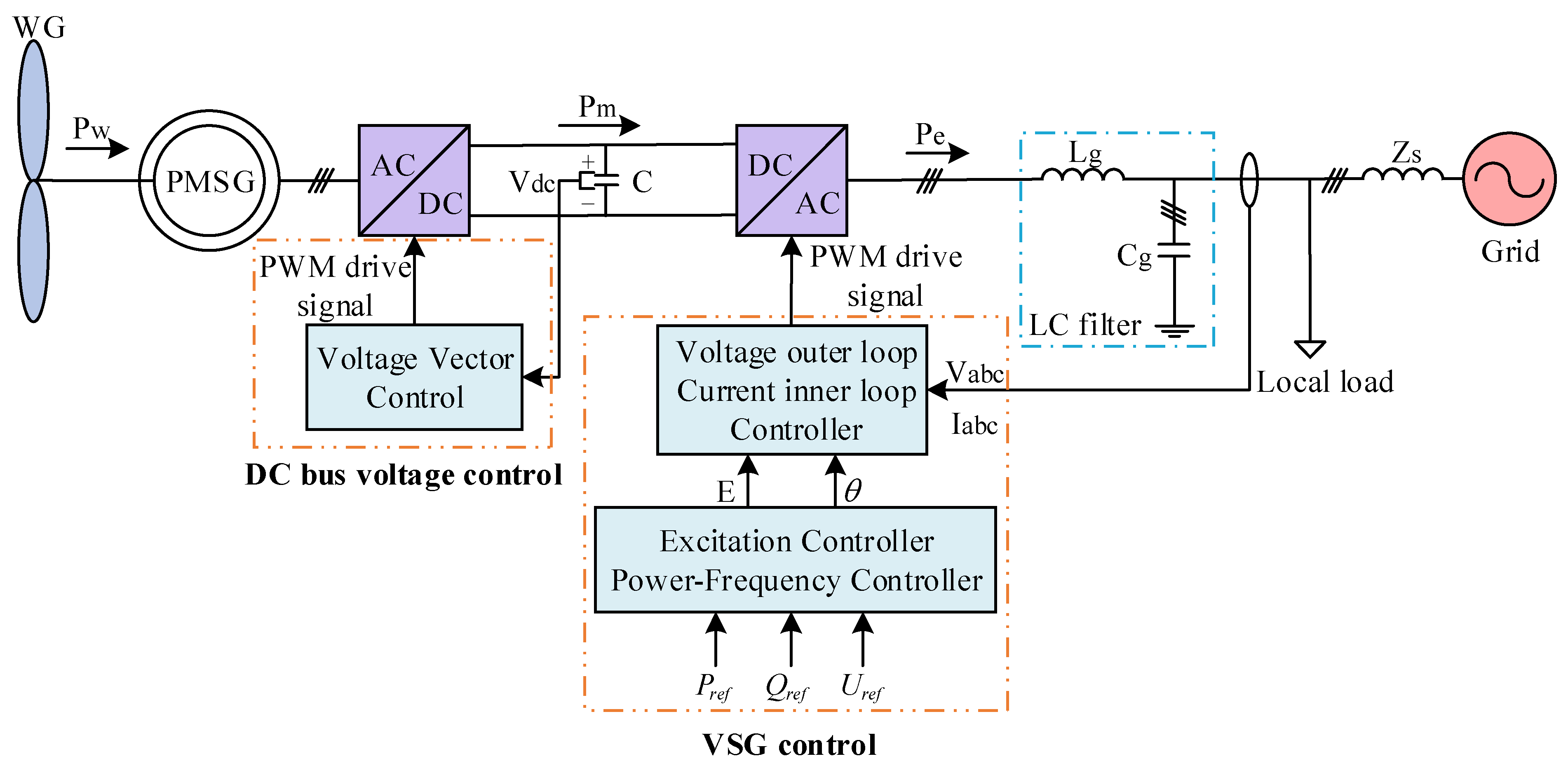
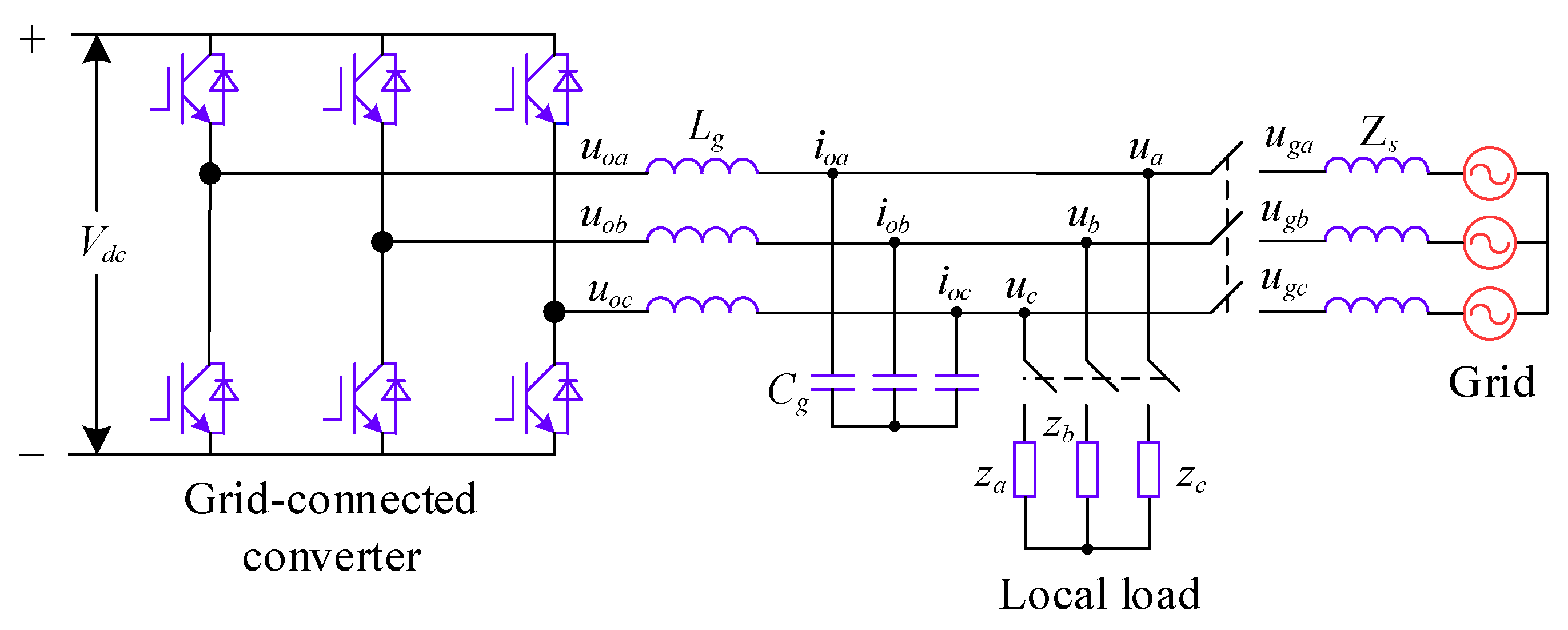
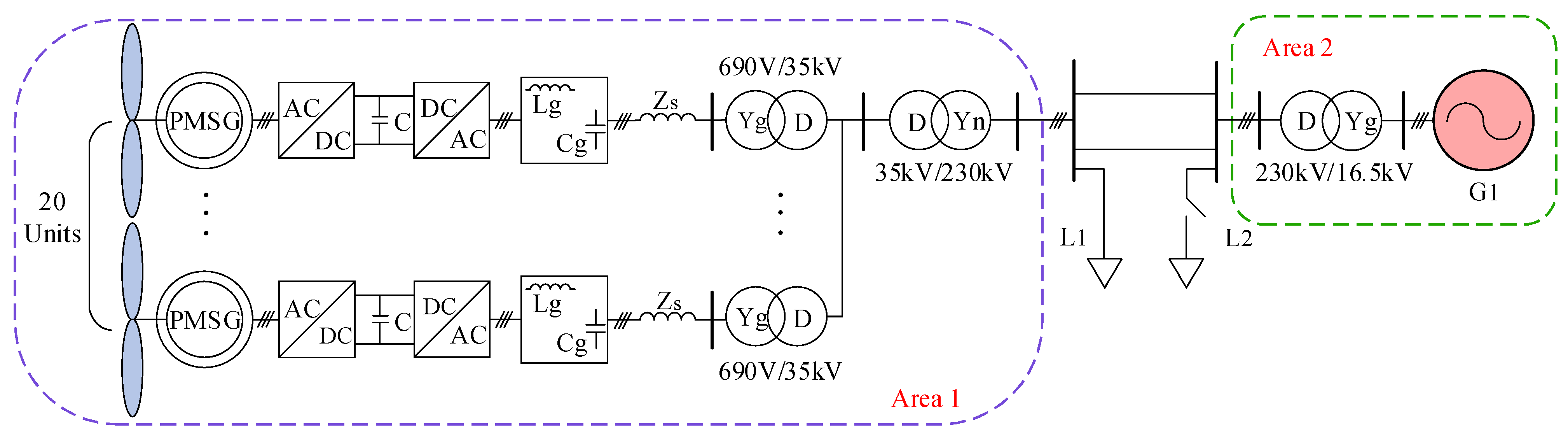
2.2. Basic Structure of Grid-Forming Direct-Drive Permanent Magnet Wind Turbines
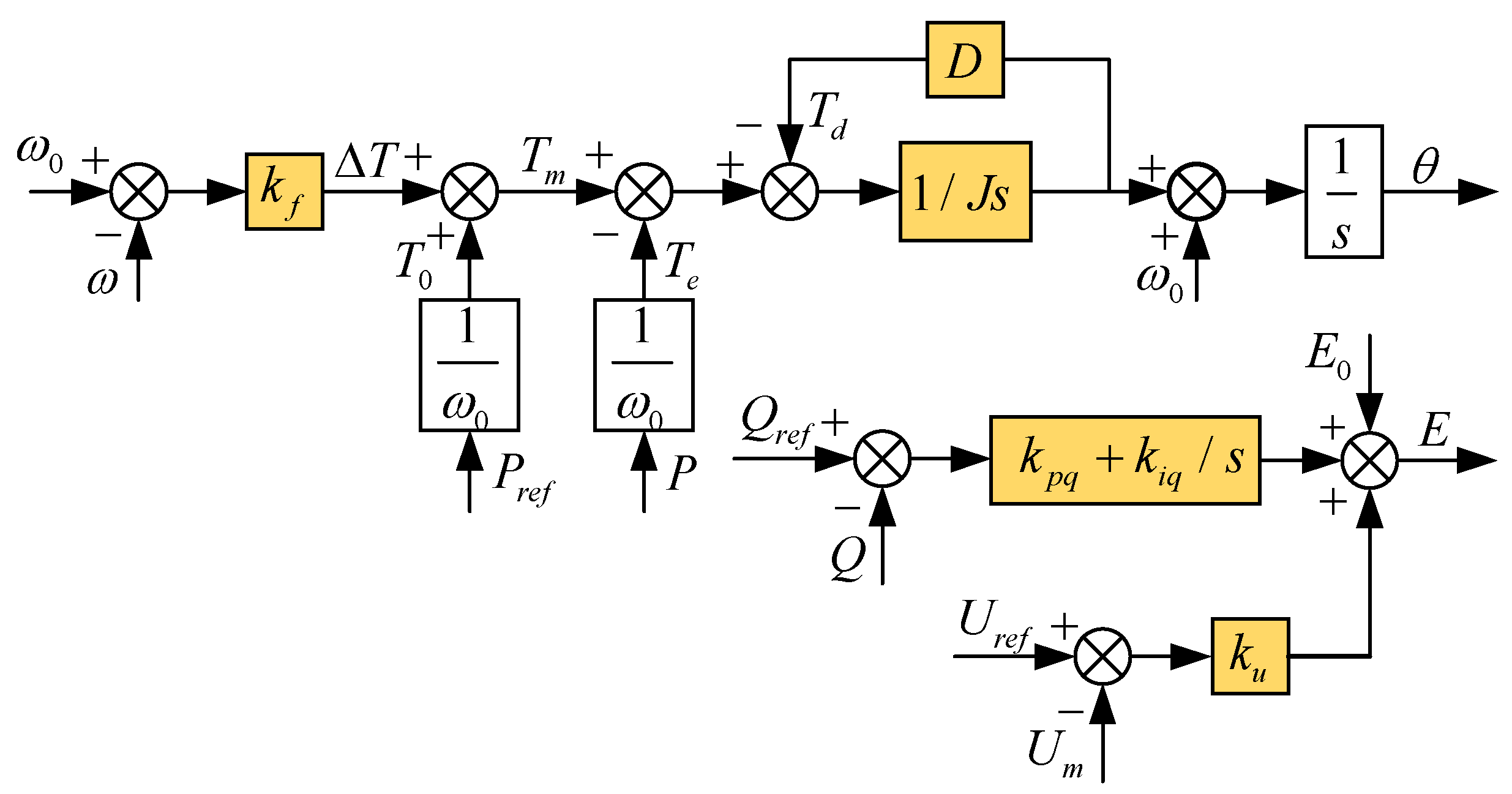
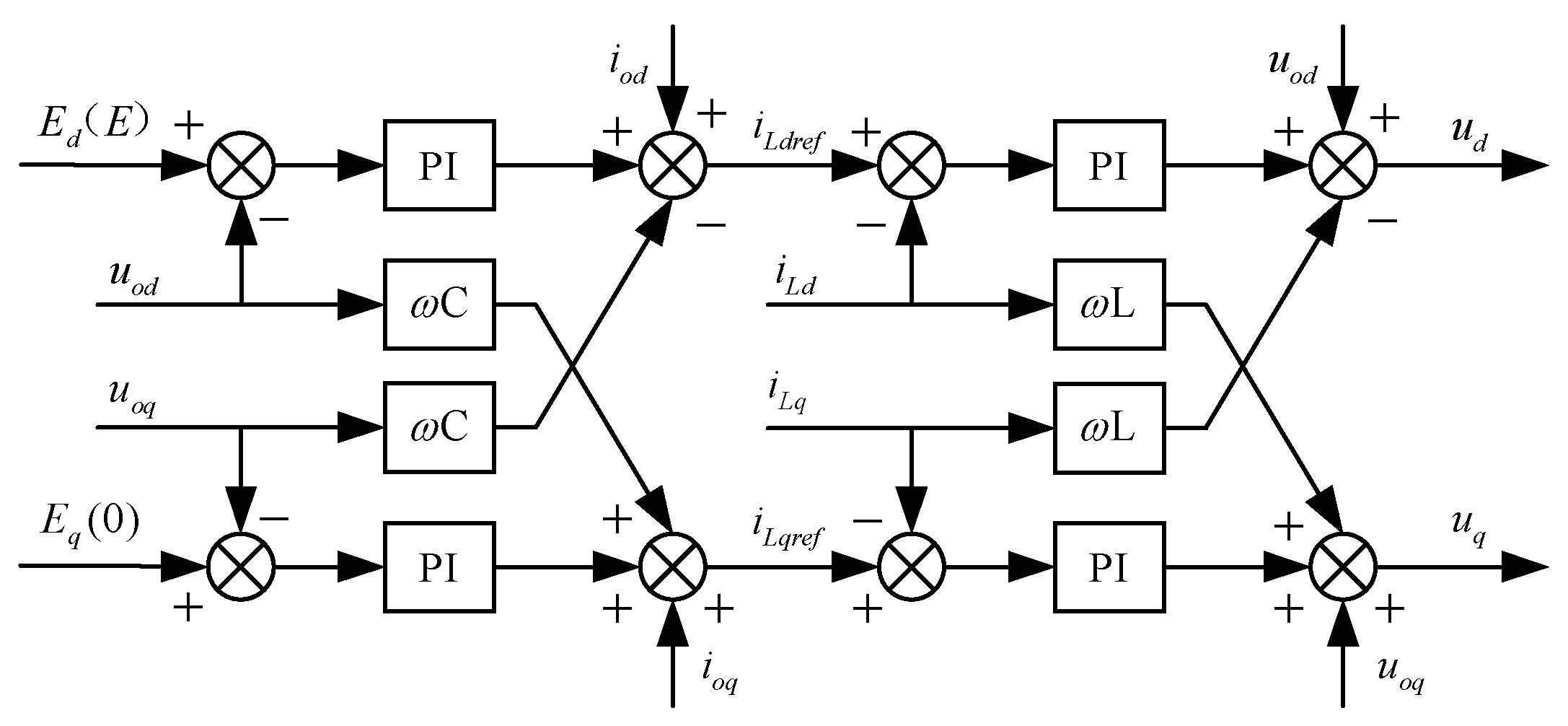
2.3. VSG Control Principle
3. Design Principles for Key Parameters Considering FM Steady State and Dynamic Characteristics
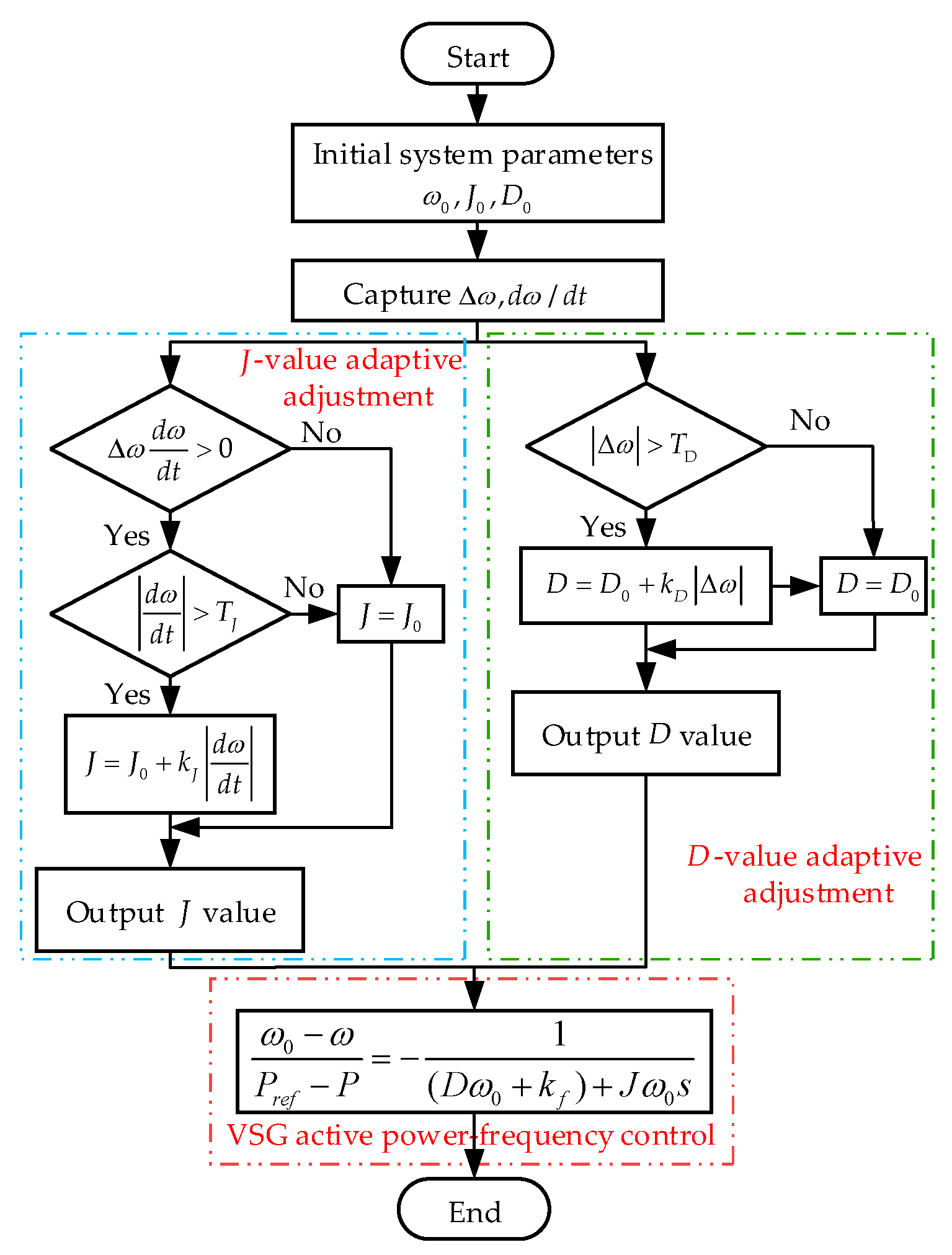
4. Parameter-Adaptive VSG Control Strategy Design Approach
4.1. Influence of the Virtual Moment of Inertia and Damping Coefficient on the Stability of the System
4.2. System Frequency Comparison under Different Parameters
4.3. Transient Process Analysis of the D-DPMSG-VSG System under a Load Disturbance
5. System Simulation and Analysis
- (1)
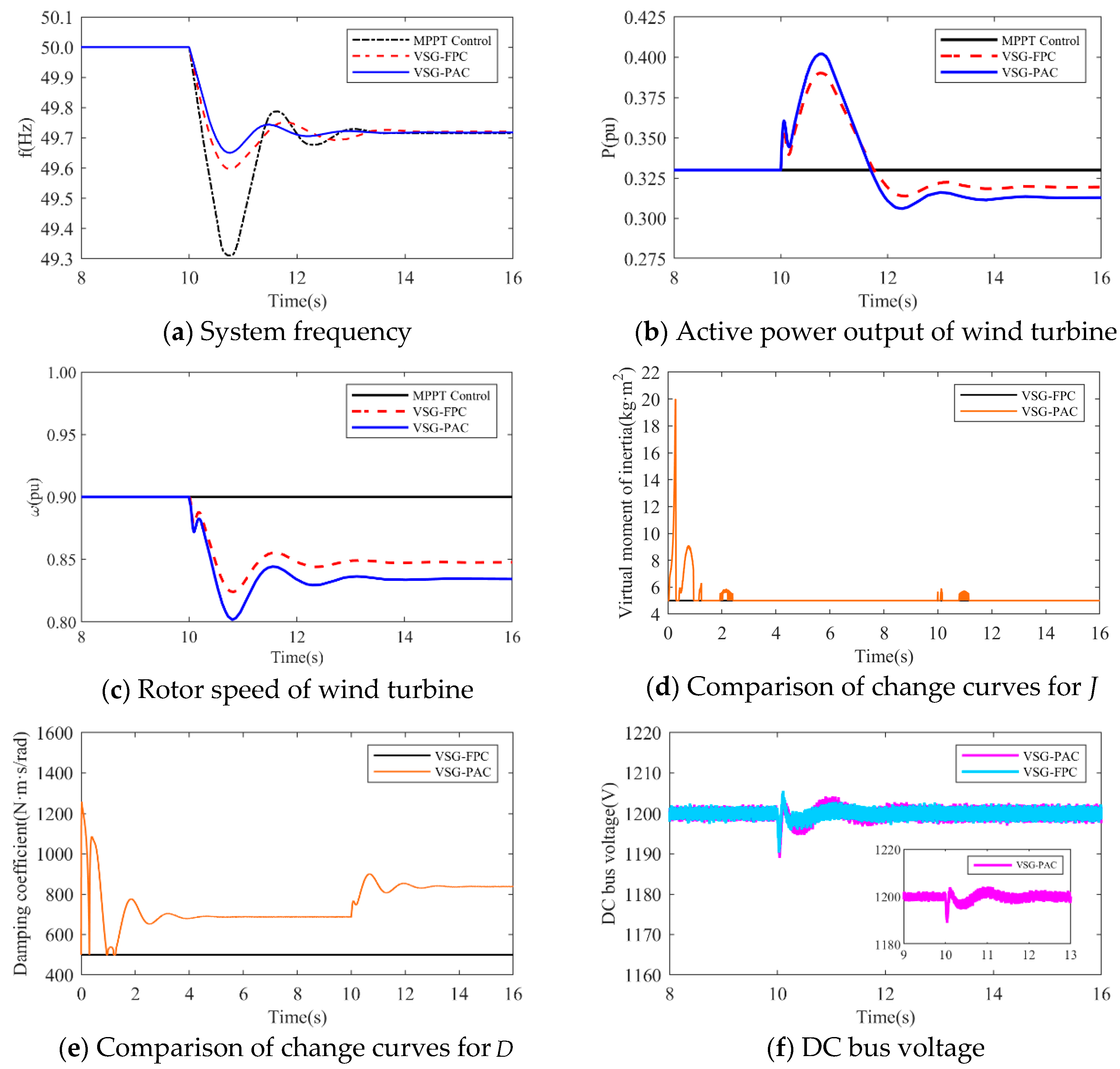
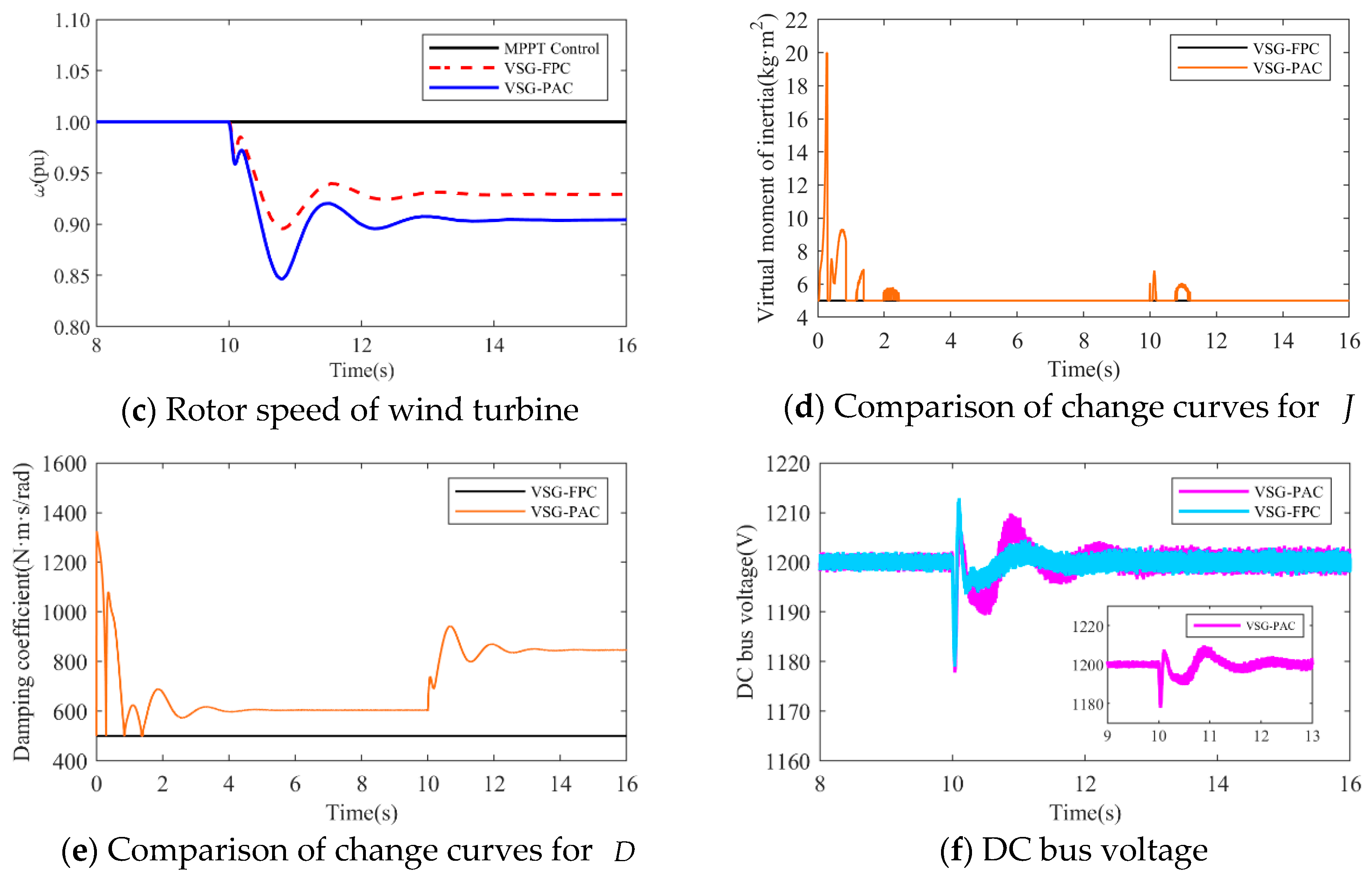
- The simulation wind speed is set at 8 m/s, and the wind turbine works in the maximum power tracking area. The simulation waveforms under two different load disturbance conditions are illustrated in Figure 15 and Figure 16. The simulation waveform display includes: a comparison of system frequency, active power output, and rotor speed of the wind turbine; curves of and ; and the fluctuation of the DC bus voltage. Table 4 presents the system frequency data for the wind power system under various control strategies and different load disturbance conditions. To validate the effectiveness of the proposed VSG-PAC in enhancing the frequency regulation capability of wind turbines, a load disturbance of 0.1 pu and 0.15 pu is introduced at 10 s. The comparison control strategies are set as MPPT control and VSG-FPC.
- 1.
- When the load disturbance is 0.11 pu, the absence of an inertial response capability in MPPT control results in a rapid drop in the system frequency due to the load mutation. The lowest frequency observed is 49.3116 Hz, representing a significant drop. In comparison to the MPPT-controlled wind turbine, the wind turbine employing VSG-FPC exhibits some degree of inertial response and primary frequency modulation capabilities. VSG-FPC mitigates the rate of the system frequency change during the initial phase and offers frequency modulation power support during frequency drops, resulting in the lowest frequency drop point of 49.5967 Hz, an improvement of 0.2851 Hz. The enhanced VSG-PAC proposed in this paper further augments the frequency modulation capability of wind turbines, achieving the lowest frequency drop point of 49.6504 Hz. Compared to VSG-FPC, the maximum frequency deviation of the system increases by 13.3% with VSG-PAC. As illustrated in Figure 15a,b, with VSG-FPC and VSG-PAC, the frequency modulation active power output of the wind turbine rises from an initial value of 0.33 pu to peak values of 0.39 pu and 0.4 pu, respectively, while the rotor speed declines from an initial value of 0.9 pu to minimum values of 0.82 pu and 0.8 pu, respectively. Compared to VSG-FPC, VSG-PAC achieves a 2.6% increase in maximum active power output and a 2.5% reduction in the minimum rotor speed decrease. These results indicate that the improved VSG-PAC presented in this paper enables the wind turbine to release rotor kinetic energy more effectively, providing greater active support during frequency modulation and demonstrating clear advantages in frequency modulation performance. As illustrated in Figure 15f, the fluctuation in DC bus voltage is more pronounced with VSG-PAC compared to VSG-FPC. This is attributed to the fact that VSG-PAC enhances the wind turbines’ capacity to mitigate system frequency drops and increases the active power transmitted to the grid, resulting in greater instantaneous unbalanced power on the DC bus, thus widening the fluctuation range. However, the fluctuation range remains within permissible limits and will not adversely affect the DC bus equipment. The analysis under a 0.15 pu load disturbance condition yields similar results. For brevity, only a summary analysis is provided below.
- 2.
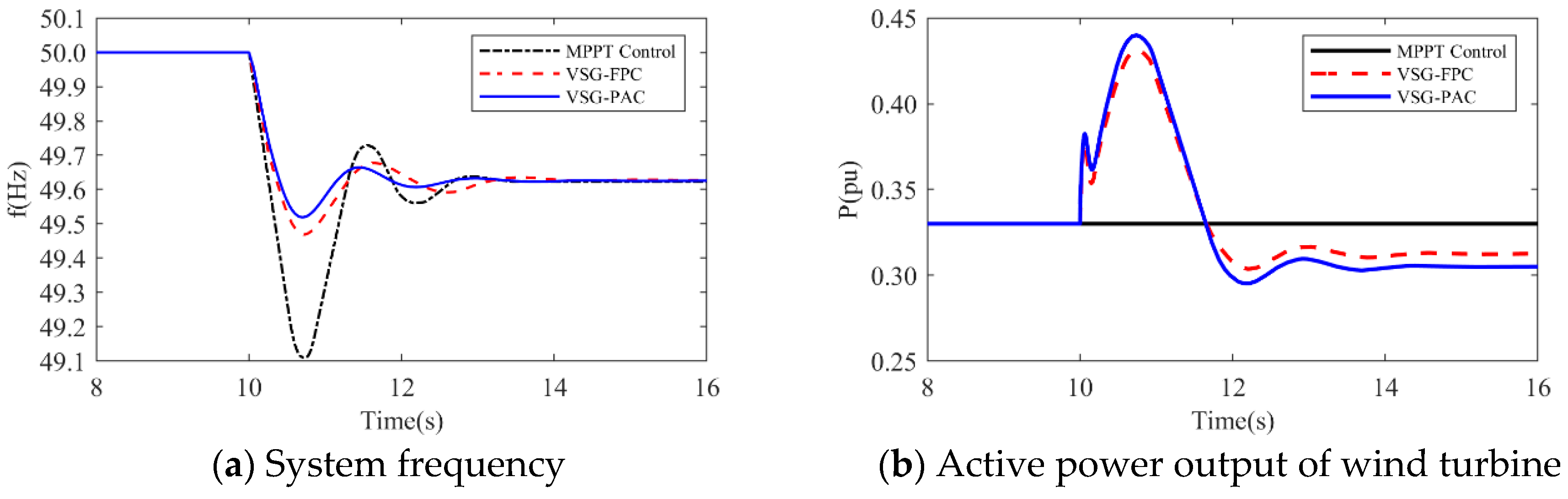
- Under a load disturbance of 0.15 pu, the lowest frequency drops of the system are 49.1102 Hz, 49.4689 Hz, and 49.5186 Hz, respectively, for MPPT, VSG-FPC, and VSG-PAC control. Compared to VSG-FPC, the maximum frequency deviation with VSG-PAC is increased by 9.4%. As illustrated in Figure 16a, compared to VSG-FPC, the output value of FM active power with VSG-PAC is improved only little. This occurs because, at this moment, the lowest rotor speed drop of the wind turbine is 0.719 pu, which is very close to 0.7 pu. The safety margin for the rotor speed is less than 0.02 pu, posing a risk of instability and turbine shutdown. In accordance with the established speed safety limits, the rotor speed cannot decrease further, thereby constraining the amount of released rotor kinetic energy. The improved VSG-PAC proposed in this paper offers substantial power support to the system while maintaining the safe operation of the wind turbine.
- (2)
- The simulated wind speed is set to 11 m/s, with the wind turbine operating in a constant speed region. The simulated waveforms under a load disturbance condition of 0.15 pu are illustrated in the Figure 17.The simulated wind speed is set to 13 m/s, with the wind turbine operating in the constant power region. Figure 18 presents the simulated waveforms under a load disturbance condition of 0.15 pu. Table 5 illustrates the impact of different wind speeds on the system’s frequency support effectiveness under a 0.15 pu load disturbance. An analysis of Figure 17 and Figure 18 and Table 5 is shown below:
- 1.
- At a wind speed of 11 m/s, the minimum frequency drops of the system are 49.1722 Hz, 49.4957 Hz, and 49.555 Hz for MPPT, VSG-FPC, and VSG-PAC control, respectively. Compared to VSG-FPC, VSG-PAC exhibits an increase in the maximum frequency deviation of 11.8%. The enhanced control strategy proposed in this paper significantly improves the inertial support capability of VSG control and further reduces the maximum frequency deviation.
- 2.
- At a wind speed of 13 m/s, the minimum frequency drops of the system are 49.2552 Hz, 49.5761 Hz, and 49.6302 Hz for MPPT, VSG-FPC, and VSG-PAC control, respectively. Relative to VSG-FPC and MPPT control, VSG-PAC shows an increase in the maximum frequency deviation of 12.76% and 50%, respectively. As illustrated by the active power output and rotor speed waveforms of the wind turbine in Figure 18b,c, the enhanced control strategy presented in this paper effectively releases rotor kinetic energy during the inertia response phase and offers greater active support to the system.
- (3)
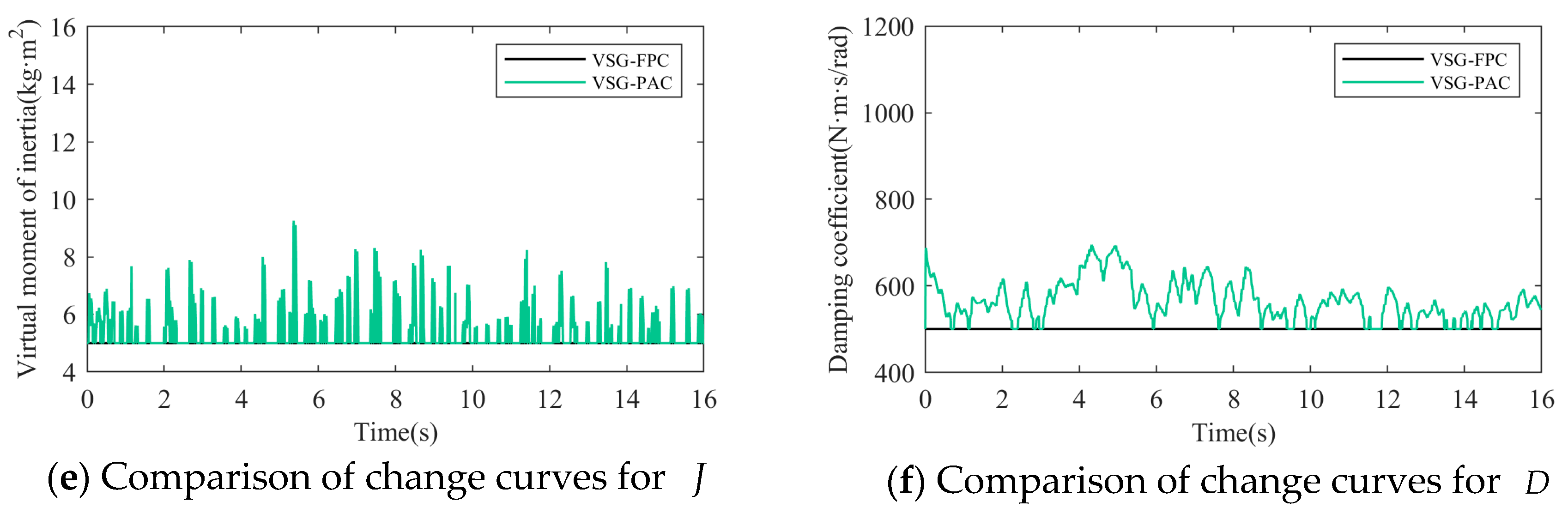
- Taking the average annual wind speed of the Kubuqi Desert in Inner Mongolia as an example, the average annual wind speed at a 120 m height in this area is 6–8 m/s, and the average wind speed at a 160 height is 6.5–8.5 m/s. In order to verify the effectiveness of the proposed method in the turbulent wind speed scenario, the following two experimental scenarios are set up. As shown in Figure 19, in Experiment 1, the average wind speed is 6 m/s, and the turbulence degree is 25.6%. When t = 10 s, a sudden increase of a 0.02 pu load occurs during the weakening gust period. In Experiment 2, the average wind speed is 8 m/s, the turbulence degree is 10.6%, and the sudden load is 0.07 pu. The sudden load disturbance event occurs during the gradual gust period.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhao, J.X.; Gao, W.; Shangguan, M.X.; Zha, X.B.; Yue, S.; Liu, Y.H. Review on frequency regulation technology of power grid by wind farm. Power Syst. Prot. Control 2017, 45, 157–169. [Google Scholar]
- Shao, H.S.; Cai, X. Research status and prospect of inertia control for large scale wind turbines. J. Shanghai Jiao Tong Univ. 2018, 52, 1166–1177. [Google Scholar]
- Nie, Y.H.; Zhang, L.L.; Zhang, L.D.; Gao, L.; Wang, Z.H. A VSG-based coordinated control method for wind turbine and flywheel energy storage. Acta Energiae Solaris Sin. 2021, 42, 387–393. [Google Scholar]
- Zhang, G.F.; Yang, J.Y.; Wang, H.X.; Xie, C.J.; Fu, Y. Coordinated frequency modulation control strategy of wind farm-storage system based on virtual synchronous generator technology. Trans. China Electrotech. Soc. 2022, 37, 83–92. [Google Scholar]
- Liang, J.; Fan, H.; Cheng, L.; Rong, S.; Li, T.; Yu, T.; Wang, L. Control strategy for improving the frequency response characteristics of photovoltaic and energy storage systems based on VSG control. Energy Rep. 2024, 11, 2295–2305. [Google Scholar] [CrossRef]
- Lv, Z.; Xu, J.; Pang, Y.; Tan, L.; Zheng, H. Control strategy and research on energy storage unit participation in power system frequency regulation based on VSG technology. J. Phys. Conf. Ser. 2024, 2703, 012002. [Google Scholar] [CrossRef]
- Li, Y.; Li, Y.L.; Li, S.; Shao, Z.; Chen, X. Power distribution and virtual inertia control of photovoltaic and hybrid energy storage system based on VSG. Electr. Power Autom. Equip. 2023, 43, 27–34. [Google Scholar]
- Chen, Y.; Luo, J.; Zhang, X.; Li, X.; Wang, W.; Ding, S. A Virtual Synchronous Generator Secondary Frequency Modulation Control Method Based on Active Disturbance Rejection Controller. Electronics 2023, 12, 4587. [Google Scholar] [CrossRef]
- Andalib-Bin-Karim, C.; Liang, X.; Zhang, H. Fuzzy-Secondary-Controller-Based Virtual Synchronous Generator Control Scheme for Interfacing Inverters of Renewable Distributed Generation in Microgrids. IEEE Trans. Ind. Appl. 2018, 54, 1047–1061. [Google Scholar] [CrossRef]
- Zhou, W.; Wang, B.; Gu, J.; Zhang, Y.; Wang, S.; Wu, Y. Power stability control of wind-PV-battery AC microgrid based on two-parameters fuzzy VSG. Front. Energy Res. 2023, 11, 1298033. [Google Scholar] [CrossRef]
- Benhmidouch, Z.; Moufid, S.; Ait-Omar, A.; Abbou, A.; Laabassi, H.; Kang, M.; Chatri, C.; Ali, I.H.O.; Bouzekri, H.; Baek, J. A novel reinforcement learning policy optimization based adaptive VSG control technique for improved frequency stabilization in AC microgrids. Electr. Power Syst. Res. 2024, 230, 110269. [Google Scholar] [CrossRef]
- Yao, F.; Zhao, J.; Li, X.; Mao, L.; Qu, K. RBF neural network based virtual synchronous generator control with improved frequency stability. IEEE Trans. Ind. Inform. 2020, 17, 4014–4024. [Google Scholar] [CrossRef]
- Zhang, Z.X.; Zhao, J.B.; Zeng, Z.W.; Mao, L.; Zhang, Y.L. VSG virtual inertia and dynamic damping compensation adaptive control based on RBFU. Power Syst. Prot. Control 2024, 52, 155–164. [Google Scholar]
- Zheng, C.; Dragičević, T.; Blaabjerg, F. Model predictive control-based virtual inertia emulator for an islanded alternating current microgrid. IEEE Trans. Ind. Electron. 2020, 68, 7167–7177. [Google Scholar] [CrossRef]
- Wang, R.; Wang, M.; Wang, K.; Wang, X. Optimization of frequency dynamic characteristics in microgrids: An improved MPC-VSG control. Int. J. Electr. Power Energy Syst. 2024, 156, 109783. [Google Scholar] [CrossRef]
- Lin, J.; Liu, S.; Tian, M.; Huang, M.; Wang, G. Power oscillation suppression of multi-VSG based on both consensus and model predictive control. Int. J. Electr. Power Energy Syst. 2024, 155, 109459. [Google Scholar] [CrossRef]
- Li, Z.J.; Jia, X.Y.; Wang, L.J. Improved virtual synchronous generator based on enhanced inertia and damping characteristics. Acta Energiae Solaris Sin. 2021, 42, 78–85. [Google Scholar]
- Sun, L.; Yang, X.; Sun, L.G.; Liu, Y.C.; Liu, C. Frequent deviation-free control for microgrid multi-inverters based on improving a virtual synchronous generator. Power Syst. Prot. Control 2021, 49, 18–27. [Google Scholar]
- Wan, X.; Gan, Y.; Zhang, F.; Zheng, F. Research on control strategy of virtual synchronous generator based on self-adaptive inertia and damping. In Proceedings of the 2020 4th International Conference on HVDC (HVDC), Xi’an, China, 6–9 November 2020; pp. 1006–1012. [Google Scholar]
- Yu, Y.; Chaudhary, S.; Tinajero, G.; Xu, L.; Bakar, N.; Vasquez, J.; Guerrero, J. A Reference-Feedforward-Based Damping Method for Virtual Synchronous Generator Control. IEEE Trans. Power Electron. 2022, 37, 7566–7571. [Google Scholar] [CrossRef]
- Xu, H.; Yu, C.; Liu, C.; Wang, Q.; Zhang, X. An Improved Virtual Inertia Algorithm of Virtual Synchronous Generator. J. Mod. Power Syst. Clean Energy 2020, 8, 377–386. [Google Scholar] [CrossRef]
- Yu, Y.; Guan, Y.; Kang, W.; Chaudhary, S.; Vasquez, J.; Guerrero, J. Fractional-Order Virtual Synchronous Generator. IEEE Trans. Power Electron. 2023, 38, 6874–6879. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, Y.; Ding, Z.; Xie, W.; Li, C. Self-Adaptive Secondary Frequency Regulation Strategy of Micro-Grid with Multiple Virtual Synchronous Generators. IEEE Trans. Ind. Appl. 2020, 56, 6007–6018. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, P.; Lin, W.; Li, Z.; Lu, G. A decentralized control for Non-error frequency regulation in an islanded microgrid containing multiple VSGs. Int. J. Elect. Power Energy Syst. 2021, 133, 107337. [Google Scholar] [CrossRef]
- Hu, X.; Li, Z.; Shu, Z.; Wang, Y. Adjustable parameters-based control strategy for VSG-type grid forming converters considering grid strength. Front. Energy Res. 2024, 12, 1403213. [Google Scholar] [CrossRef]
- Li, S.L.; Qin, S.Y.; Wang, R.M.; Zhang, L.; Bi, R. A collaborative control of primary frequency regulation for DFIG-WT. Acta Energiae Solaris Sin. 2020, 41, 101–109. [Google Scholar]
- Hou, X.; Sun, Y.; Zhang, X.; Lu, J.; Wang, P.; Guerrero, J.M. Improvement of frequency regulation in VSG- based AC microgrid via adaptive virtual inertia. IEEE Trans. Power Electron. 2020, 35, 1589–1602. [Google Scholar] [CrossRef]
- Liu, D.; Jiang, K.; Ji, X.; Cao, K.; Xu, C.; Sang, S.; Yang, D. Improved VSG strategy of grid-forming inverters for supporting inertia and damping. Front. Energy Res. 2024, 11, 1331024. [Google Scholar] [CrossRef]
- Zhao, P.; Wu, P.; Zhang, S.; Wang, N.; Li, Y.; Hu, Y. Application of VSG technology based on flexible parameter adjustment in PV unit grid-connected inverter. J. Phys. Conf. Ser. 2021, 2076, 012118. [Google Scholar] [CrossRef]
- Yu, J.R.; Sun, W.; Yu, J.G.; Wang, Y. Virtual synchronous generator control of a grid-connected inverter based on adaptive inertia UI. Power Syst. Prot. Control 2022, 50, 137–144. [Google Scholar]
- Zhu, Z.B.; Huang, S.P. Microgrid stability control based on adaptive rotating inertia VsGy. J. Electr. Eng. 2020, 15, 41–47. [Google Scholar]
- Zhang, F.D.; Piao, Z.G.; Guo, Y.Q. Research on adaptive control strategy of VSG rotational inertia. Acta Energiae Solaris Sin. 2020, 41, 93–100. [Google Scholar]
- Xiong, J.; Zhang, K.; Chen, J. An Engineering Design Technique of Controller for PWM Rectifier. Adv. Technol. Electr. Eng. Energy 2002, 21, 44–69. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indices | No Change, Increase | No Change, Increase |
|---|---|---|
| Diminish | Amplify | |
| Faster | Slower | |
| Faster | Slower | |
| Diminish | Amplify |
| Section | |||||
|---|---|---|---|---|---|
| ① | >0 | >0 | >0 | Amplify | Amplify |
| ② | >0 | <0 | <0 | Diminish | Amplify |
| ③ | <0 | >0 | <0 | Amplify | Amplify |
| ④ | <0 | <0 | >0 | Diminish | Amplify |
| Wind turbine parameters | |||
| Parameters | Value | Parameters | Value |
| Rating power | 2.5 MW | DC bus voltage | 1200 V |
| Polar logarithm | 80 | Stator resistance | 0.006 |
| Stator inductance | 0.395 H | Net-side filter inductor | 0.0003 H |
| Net-side filter capacitors | 25 μF | Rated frequency | 50 Hz |
| Synchronous generator parameters | |||
| Parameters | Value | Parameters | Value |
| Rated voltage | 16.5 kV | Rated frequency | 50 Hz |
| Rating power | 100 MW | d-axis reactance | 0.146 pu |
| q-axis reactance | 0.0969 pu | d-axis transient reactance | 0.0608 pu |
| q-axis sub-transient reactance | 0.06 pu | q-axis sub-transient reactance | 0.04 pu |
| Load Disturbances | Control Strategies | ||||
|---|---|---|---|---|---|
| MPPT control | 49.3116 | 49.7153 | −0.6884 | −0.2847 | |
| VSG-FPC | 49.5967 | 49.721 | −0.4033 | −0.279 | |
| VSG-PAC | 49.6504 | 49.718 | −0.3496 | −0.282 | |
| MPPT control | 49.1102 | 49.623 | −0.8898 | −0.377 | |
| VSG-FPC | 49.4689 | 49.6279 | −0.5311 | −0.3721 | |
| VSG-PAC | 49.5186 | 49.6254 | −0.4814 | −0.3746 |
| Wind Speed | Control Strategies | ||||
|---|---|---|---|---|---|
| MPPT control | 49.1102 | 49.623 | −0.8898 | −0.377 | |
| VSG-FPC | 49.4689 | 49.6279 | −0.5311 | −0.3721 | |
| VSG-PAC | 49.5186 | 49.6254 | −0.4814 | −0.3746 | |
| MPPT control | 49.1722 | 49.661 | −0.8278 | −0.339 | |
| VSG-FPC | 49.4957 | 49.6626 | −0.5043 | −0.3374 | |
| VSG-PAC | 49.555 | 49.6615 | −0.445 | −0.3385 | |
| MPPT control | 49.2552 | 49.7355 | −0.7448 | −0.2645 | |
| VSG-FPC | 49.5761 | 49.7359 | −0.4239 | −0.2641 | |
| VSG-PAC | 49.6302 | 49.7356 | −0.3698 | −0.2644 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, S.; Meng, K.; Wu, Z. A Parameter-Adaptive Method for Primary Frequency Regulation of Grid-Forming Direct-Drive Wind Turbines. Sensors 2024, 24, 6651. https://doi.org/10.3390/s24206651
Hu S, Meng K, Wu Z. A Parameter-Adaptive Method for Primary Frequency Regulation of Grid-Forming Direct-Drive Wind Turbines. Sensors. 2024; 24(20):6651. https://doi.org/10.3390/s24206651
Chicago/Turabian StyleHu, Siqi, Keqilao Meng, and Zikai Wu. 2024. "A Parameter-Adaptive Method for Primary Frequency Regulation of Grid-Forming Direct-Drive Wind Turbines" Sensors 24, no. 20: 6651. https://doi.org/10.3390/s24206651
APA StyleHu, S., Meng, K., & Wu, Z. (2024). A Parameter-Adaptive Method for Primary Frequency Regulation of Grid-Forming Direct-Drive Wind Turbines. Sensors, 24(20), 6651. https://doi.org/10.3390/s24206651