1. Introduction
Oil spill incidents, particularly those involving crude oil, cause extensive and long-lasting harm to marine ecosystems, hinder economic progress, and have significant implications for public health [
1]. These oil spill incidents can arise from various causes, including the leakage of an oil pipeline, discharges from ships, and other unforeseen disasters [
2,
3]. A prime example of such a disaster is the Deepwater Horizon, a catastrophic event that unfolded in the Gulf of Mexico in 2010. This incident led to the spillage of over 800 million liters of oil, causing extensive and enduring damage to the marine ecosystem, and the repercussions of this disaster could potentially persist for up to a century [
4]. Furthermore, in a comprehensive analysis of oil satellite images from 2014 to 2019, Dong et al. [
5] found that approximately ninety percent of oil slicks were located within 160 km of shorelines aligned with major shipping routes, which suggests a strong correlation between maritime traffic and the occurrence of oil slicks.
Rapid response is critical in the event of an oil spill, as there is a limited window of opportunity for effectively managing the spill [
6]. Due to the rapid expansion of oil spills, time is of the essence for effective containment, which often involves using oil booms, and remediation by pumping out the oil.
Traditionally, the detection and monitoring of oil spills have required the involvement of human experts and specialized equipment. Expert personnel engage in extensive inspection missions, during which they visually examine the water surface and collect in-situ samples. In contrast to the urgent nature of oil spill response, this process is time-consuming. Monitoring large areas poses additional challenges, requiring significant resources, and is often affected by weather conditions.
The emergence of remote sensing techniques, which utilize satellite, aircraft, or drone sensing [
7,
8,
9,
10], enable oil spill detection efficiently without the need for in situ sampling. Effective oil spill surveillance is essential for managing oil spill events, and remote sensing technology can help to identify spills early before they cause significant harm. Oil spills can be detected and monitored in real-time using passive optical and active radar or lidar sensors [
9]. However, remote sensing by satellite is limited by its resolution and frequency, which causes detection faults or delayed detection of oil spills [
11]. These may lead to an oil spill spreading over a larger area and potentially causing more damage to the marine ecosystem.
Aerial surveillance for detecting oil spills requires highly skilled and trained operators capable of interpreting images to identify oil spills [
12]. Unmanned Aerial Vehicles (UAVs) have emerged as a cost-effective and readily deployable solution, enabling continuous monitoring of the sea surface, and capturing high-resolution imagery [
13]. The research of remote sensing with UAVs primarily focuses on the detection phase, introducing novel methods to detect oil pollution. Recent studies underscore a notable progression in the field of oil spill detection, attributing these advancements primarily to the evolution of deep learning methodologies [
14,
15].
Various studies have explored oil spill detection using different sensing instruments [
16]. For instance, Koirala et al. conducted experiments to examine the potential of using an RGB camera mounted on a drone for the detection of various oil types, including diesel oil and hydraulic oil [
17]. Thomas et al. demonstrated the efficacy of combining an infrared Convolutional Neural Network (CNN) [
18]. Similarly, Zongchen et al. presented a method involving hyperspectral sensing for oil spill detection, utilizing a classifier that relies on spectral characteristics and CNN for enhanced accuracy [
19]. However, the use of UAVs for oil spill monitoring presents limitations, such as restricted battery capacity, limited payload capability, and range. These factors currently limit UAVs’ ability to comprehensively monitor large areas. While the detection of an oil spill is an essential phase, planning the oil spill sampling path for surveying is equally crucial. This task involves designing paths that enable efficient data gathering and sampling from the affected area, ensuring comprehensive monitoring and accurate delineation of the polluted zone (red zone).
Unmanned Surface Vehicles (USVs) offer a practical solution for oil spill monitoring because their high payload and substantial battery capacity enable continuous operation [
20]. However, the limited Field of View (FoV) of USV presents a challenge. Therefore, integrating their capabilities with effective path-planning strategies is essential to ensuring efficient monitoring and containment of oil spills.
Coverage Path Planning (CPP) represents a straightforward approach to handling the task of monitoring oil spills. In this method, the agent navigates through the relevant area, ensuring that the entire region is systematically covered. Shaocheng et al. [
21] demonstrated a CPP approach by incorporating the principles of the traveling salesman problem and the utilization of a self-organizing map. Additionally, Bowen et al. [
22] presented a method based on a deep Q network for efficient CPP, which aims to achieve complete coverage of the polluted area, a process that often involves prolonged and dense sampling.
In this context, our recent research introduced an approach known as the Boundary Red Emission Zone Estimation (BREEZE) [
23]. This path-planning method, BREEZE, proposes estimating the boundary of the contaminated area, in events of gas leakage using UAV platforms. Rather than conducting exhaustive mapping of the entire area, the BREEZE approach strategically focuses on following the boundary of the red zone.
This current manuscript introduces the Oil Spill-BREEZE (OS-BREEZE) method, a novel approach for USVs that employs real-time computer vision techniques to estimate the red zone of oil pollution. It is designed to trace the boundary of this zone, offering a rapid and accurate assessment of the entire polluted area while addressing the challenge of the USV’s limited FoV. We demonstrate the efficacy of OS-BREEZE through a synthesized experiment, evaluating its effectiveness against traditional sampling approaches using four common metrics. The key contribution of this study is outlined as follows:
OS-BREEZE, an efficient pollution sampling path planning method for a USV platform.
Mapping red zone method to estimate the extent of pollution.
An experimental framework for examining oil spill events.
Furthermore, the study’s results indicate a substantial reduction in path length while maintaining high accuracy in pollution assessment.
3. Algorithmic Work
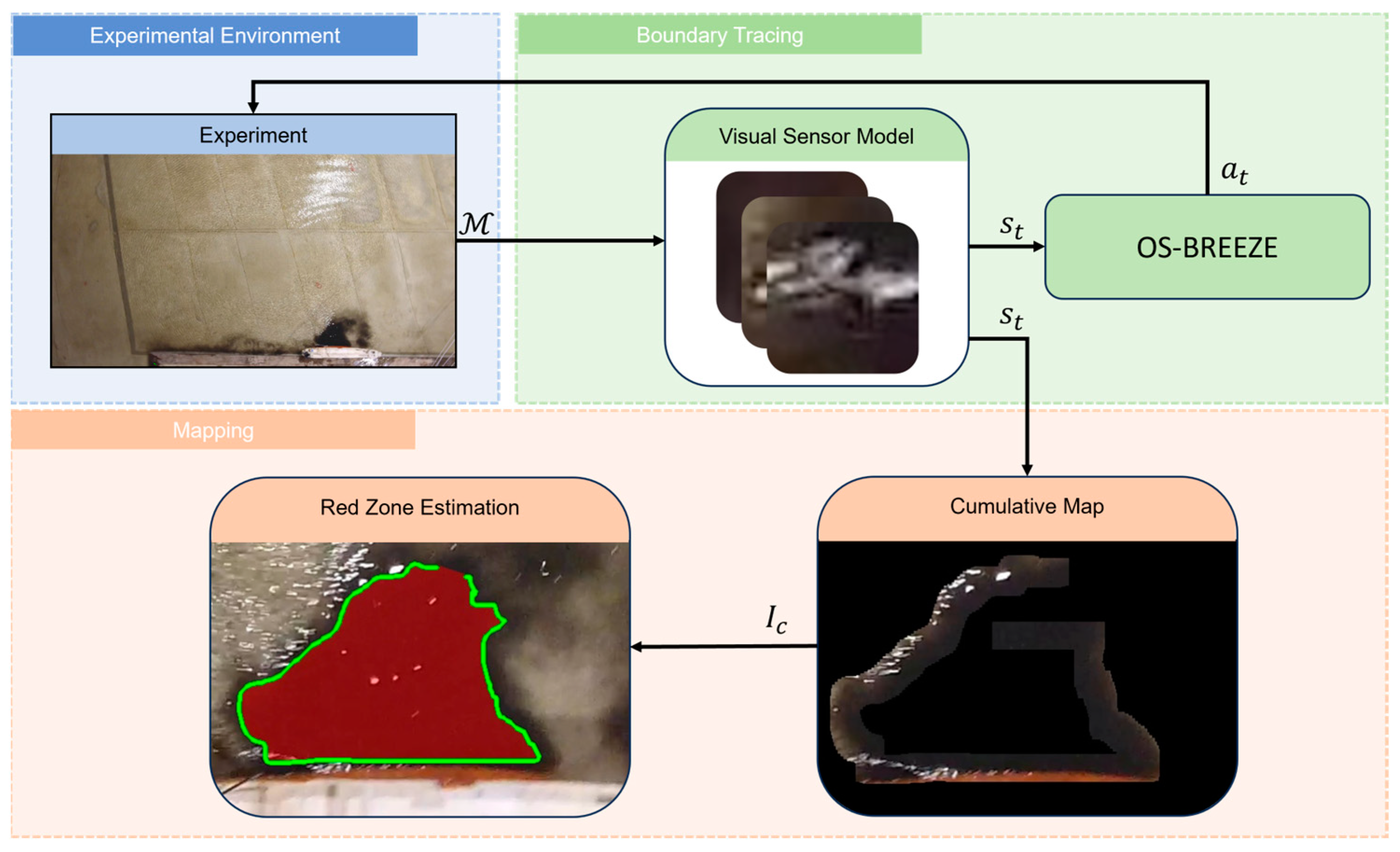
The following section offers an in-depth description of the OS-BREEZE algorithm, covering its various stages and operational framework. This is complemented by
Figure 3, which graphically represents the algorithm’s structure and process flow. This flow involves three main components: Experimental Environment, Boundary Tracing, and Mapping.
Initially, the experimental environment provides the zone of contamination, denoted by , informing the boundary tracing component’s visual sensor model. The visual sensor model then generates state visuals, , for the OS-BREEZE algorithm, which in turn directs the agent’s actions via the command, . During the mapping phase, these state visuals are compiled into a cumulative map. This map is subsequently employed in the red zone estimation process, which identifies and delineates the estimated contaminated area, labeled as , thus effectively outlining the scope of the pollution.
3.1. OS-BREEZE
The OS-BREEZE, as outlined in Algorithm 1, is designed to effectively monitor dynamic oil spills, focusing particularly on tracing the evolving boundaries of these spills. At the core of its operation, the algorithm relies on inputs from the visual sensor model. This model is adept at simulating the FoV of the USV, thereby providing a realistic perspective of aquatic environment surveillance.
This visual, defined as
and depicted in
Figure 3 in the visual sensor model, is received by the OS-BREEZE as the input for the algorithm. The first step in the algorithm’s processing chain is the application of a Gaussian filter. This filter is applied through a convolution process, which involves overlaying the following Gaussian kernel onto the image:
The convolution process is defined by the following function:
In this context, represents the output pixel value, is the kernel size, is the state image, and is the Gaussian kernel. This filter plays a role in mitigating noise within the visual data, which is a crucial step for ensuring accuracy. The noise in the image can stem from various sources, including environmental factors like tides and foam, as well as inherent sensor limitations.
Following noise reduction, the algorithm proceeds to implement a thresholding technique. In this step, a threshold filter is applied to the FOV visual. This filter is a binary-based filter with a predetermined opacity value that is characteristic of the water in the surveyed area. The purpose of this step is critical for distinguishing between areas affected by the oil spill and the surrounding water.
Subsequently, the algorithm advances to the stage where the Sobel filter is applied. This filter is crucial in the process of boundary detection, calculating the gradient magnitude and direction for each pixel in the image. The Sobel filter operates by applying two separate convolution kernels, horizontal
and vertical
These calculations of the Sobel gradient enable the algorithm to effectively highlight the most significant changes in intensity, corresponding to the edges within the visual data.
In the algorithm’s final stage, the task is to trace the spill boundary, which involves calculating the perpendicular mean relative angle within the FoV image. This method accurately maps the contours of the spill. The calculation of the perpendicular mean relative angle represented by
This identifies the direction of edge gradients, facilitating the precise following of the spill boundary within the aquatic environment.
| Algorithm 1. |
| Inputs: | |
| Output: | action |
|
| for each in do: |
| if do: |
| |
| else: |
| |
| for each in |
| |
| |
|
| return |
3.2. Mapping and Red Zone Estimation
The mapping process, as shown in Algorithm 2, is initiated simultaneously with the boundary tracing, utilizing visuals received from the visual sensor. This process involves integrating the USV’s precise location data with the visuals of its surrounding area, as depicted in
Figure 3. These visuals are then united into the cumulative map,
, encompassing all visuals collected from the locations visited by the USV.
Subsequently, the red zone estimation process takes over, utilizing the cumulative map to accurately estimate the spread of the red zone. This process mirrors the initial steps of the OS-BREEZE algorithm, starting with noise cancellation filtering to enhance estimation precision. Following this, a threshold filter is applied to classify the visuals based on the opacity values, a crucial step in identifying areas of the oil spill.
The next critical step involves locating boundary pixels within the exposed areas of the cumulative map. This is achieved by applying the Sobel filter and identifying pixels with a gradient magnitude above a certain threshold as potential boundary markers. Finally, the contour of the oil spill is delineated using the Topological Structural Analysis method [
24], extracting it from the set of identified boundary pixels.
| Algorithm 2. |
| Inputs: | |
| Output: | |
|
| for each in do: |
| if do: |
| |
| else: |
| |
| for each in |
| |
| |
| |
| if do: |
| |
|
| return |
4. Results
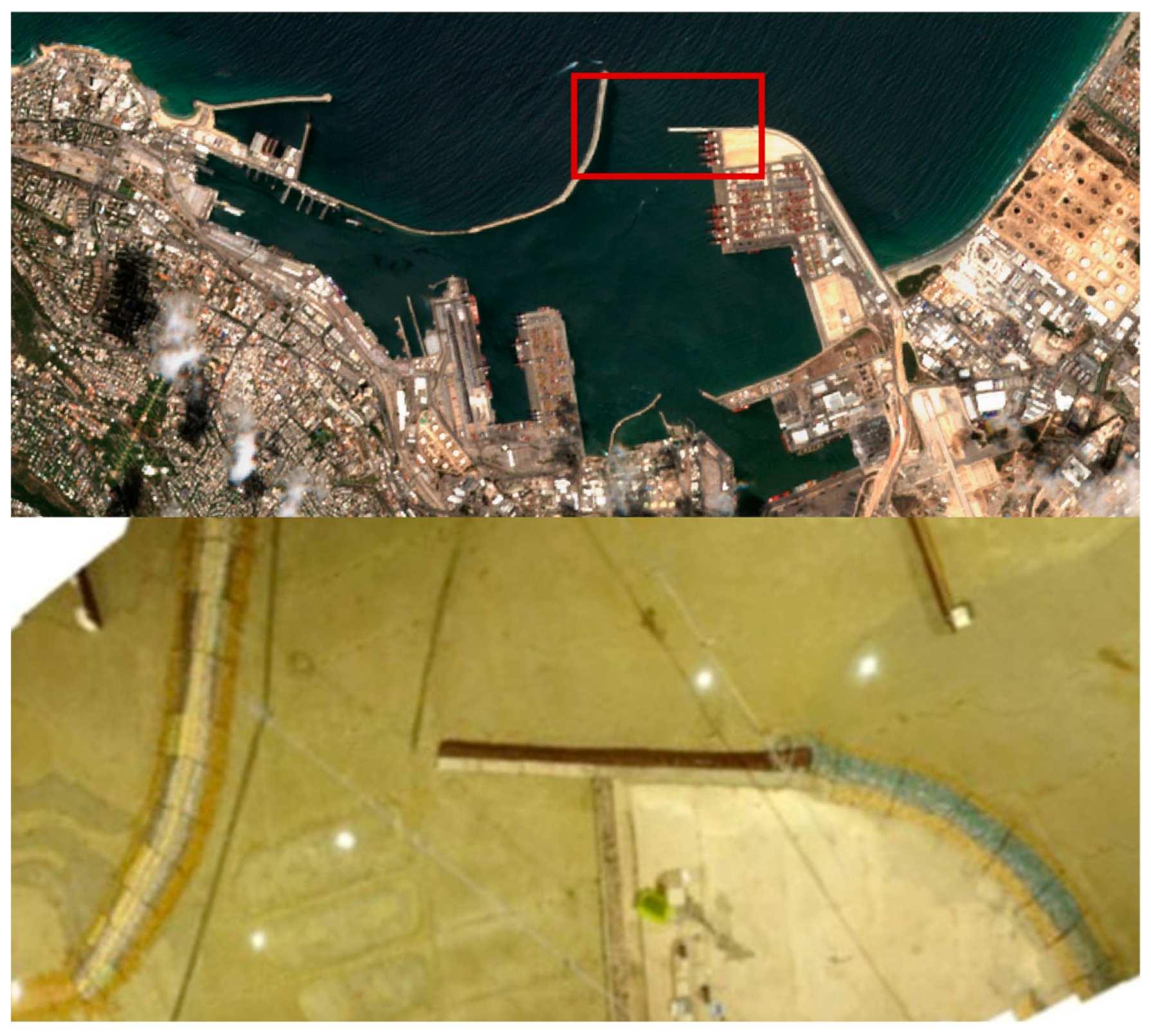
The results were obtained during a physical experiment, as presented in
Figure 4 carried out on the CPM, an accurate scale model of Haifa port with an aspect ratio of 1:120. The CPM is designed to simulate real port scenarios, such as oil pollution.
In our experiment, we examined the OS-BREEZE algorithm framework’s performance in managing oil spills from various sources.
We experimented with different pollution scenarios, each varying in the source of pollution (vessel, pipeline), the rate of input (slow, medium, high), and changing meteorological and oceanographic conditions.
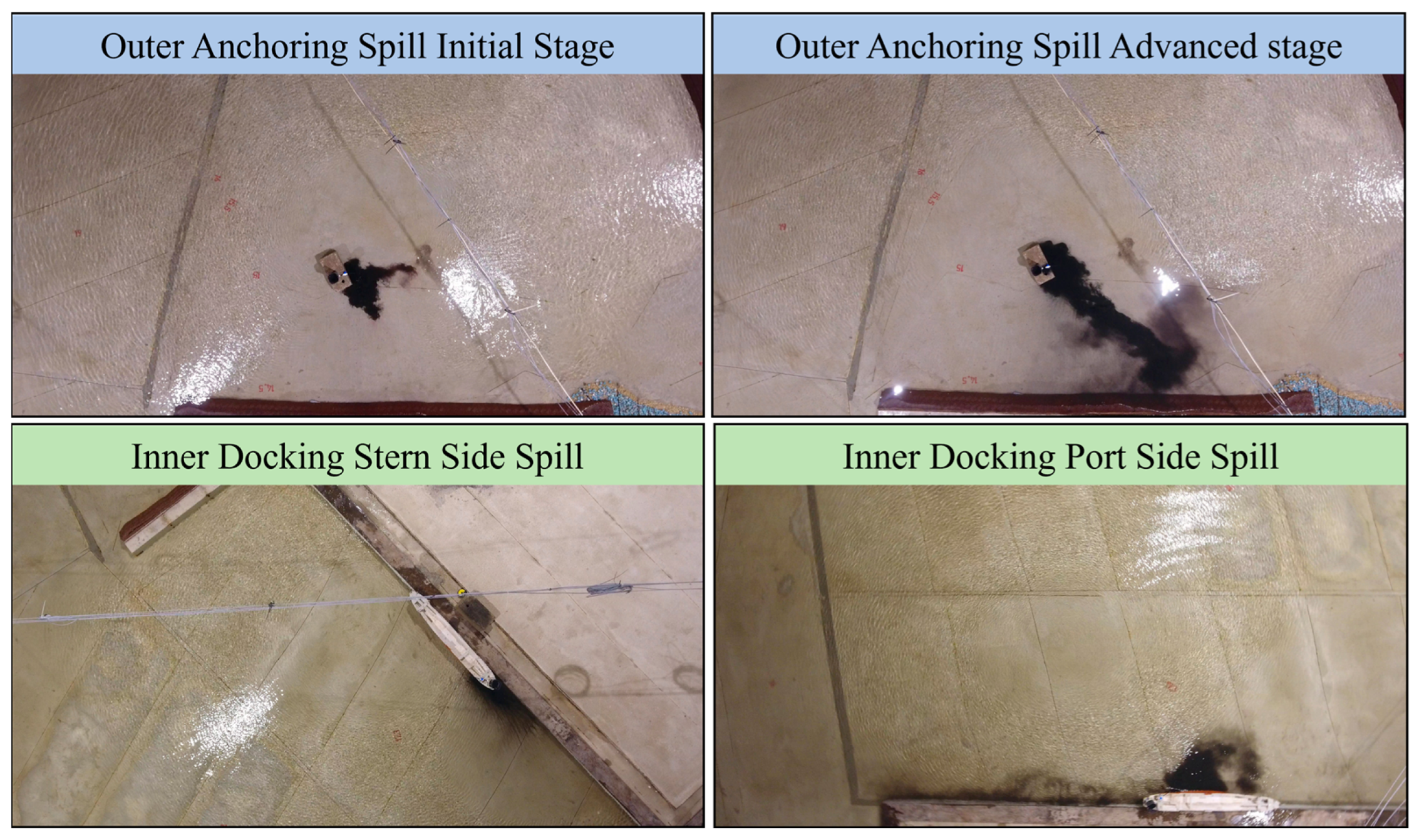
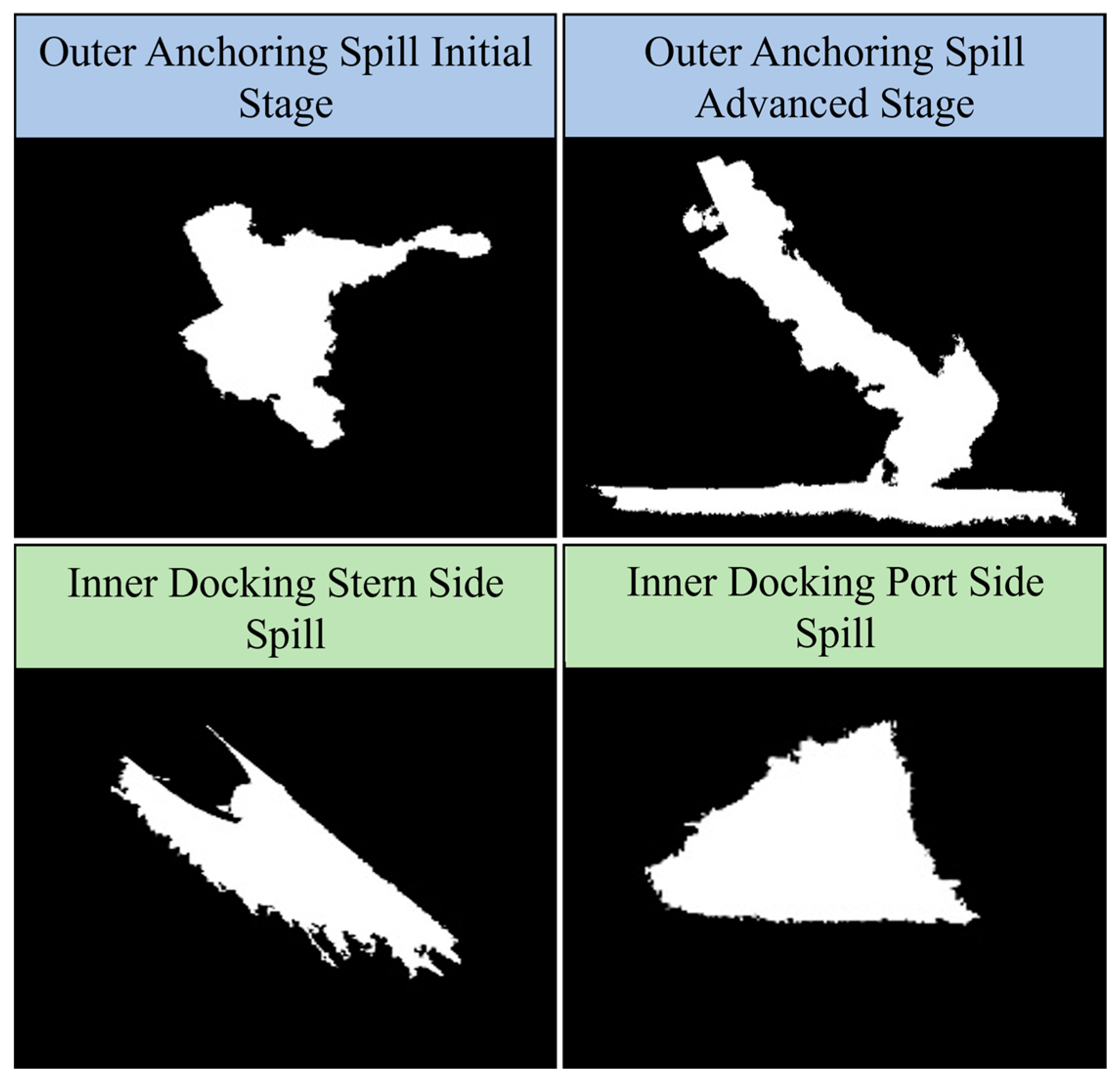
Figure 4 presents four distinct spill scenarios: Outer Anchoring Spill Initial Stage, Outer Anchoring Spill Advanced Stage, Inner Docking Stern Side Spill, and Inner Docking Port Side Spill.
The Outer Anchoring Spill Initial Stage represents the early phase of a spill, where an oil pipeline lies on the seabed in the port area. In the Outer Anchoring Spill Advanced Stage, the USV encounters a more advanced phase of the spill, where the red zone of the oil spill has extended, making the estimation process more complex. Lastly, the Inner Docking spills illustrate the challenges posed by oil spills that spread along the vessel and the pier.
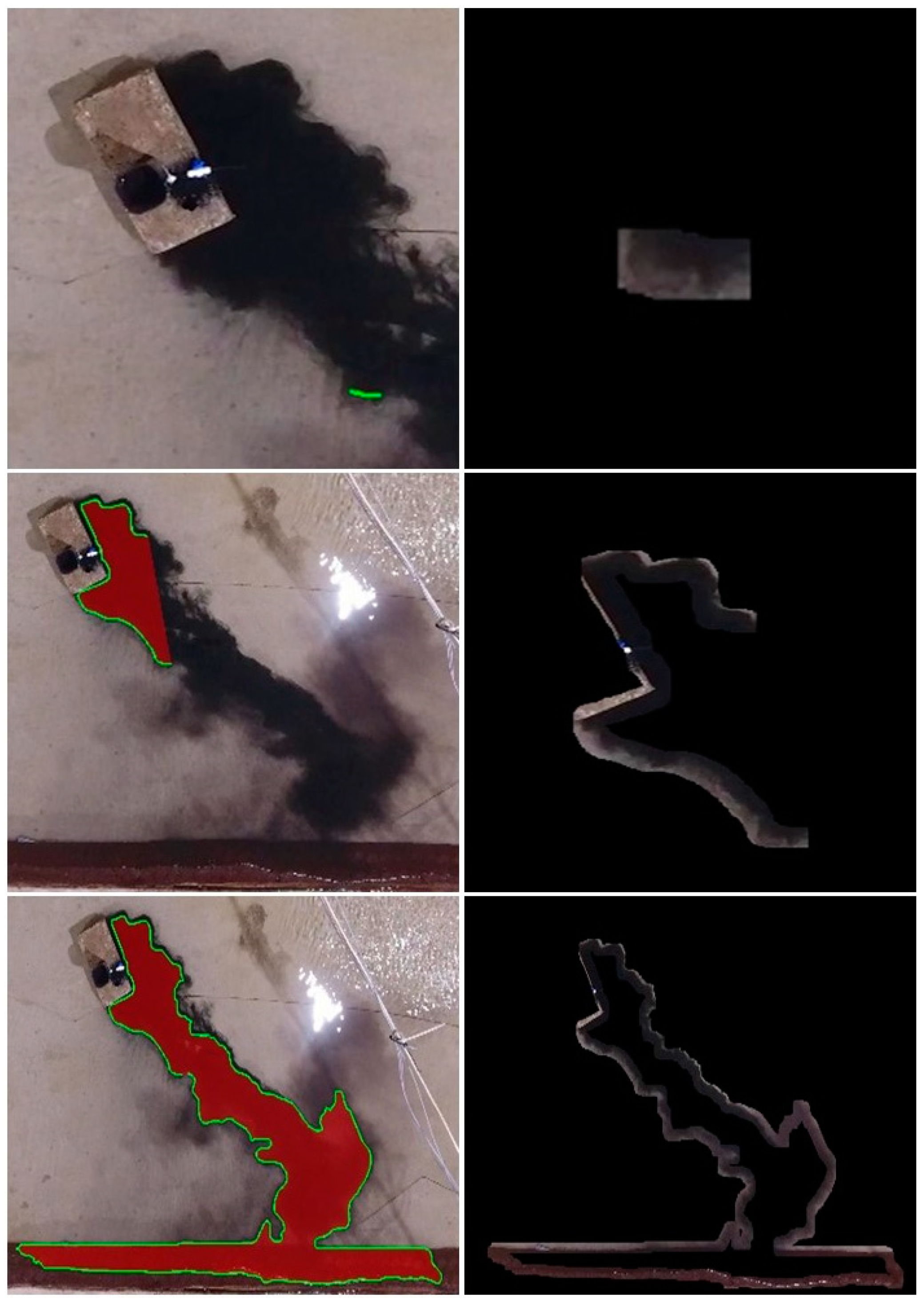
Figure 5 presents the ground truth areas of the red zone for the examined scenarios, defined by a predetermined opacity level that serves as the threshold for pollution level in the experiment. The effectiveness of the OS-BREEZE algorithm in estimating the red zone was assessed by comparison with a standard baseline algorithm, known as Sweep, across a variety of scenarios. The Sweep algorithm, commonly likened to the path of a lawnmower traversing a lawn, is a systematic method frequently employed for comprehensive area coverage. Utilizing this method, the agent starts at one corner of the target area, and proceeds in a straight line until it encounters the boundary. Upon reaching this limit, the agent adjusts its position vertically by a predetermined distance and then continues in the opposite direction. This back-and-forth process is repeated in an exhaustive manner until the entire area is covered.
This comparative analysis included evaluating the coverage of the path planning and comparing the path lengths generated by both the Sweep and OS-BREEZE algorithms, as illustrated in
Figure 6. The results for the OS-BREEZE algorithm were derived from 10 separate runs, each under different initial conditions, where the mean was calculated as the following
and the standard deviation (SD) calculated according to
.
Experimental Results
The experimental results for the Outer Anchoring and Inner Docking scenarios, using a USV deployed to map and monitor areas impacted by the oil spill, with the representation of the red zone ground truth oil spill is shown in
Figure 5. The performance of the OS-BREEZE algorithm, as quantitatively measured by Precision, Recall, and F1-Score, is detailed in
Table 1. This table provides a statistical analysis of the algorithm’s effectiveness across different scenarios, illustrating the mean (
) and SD (
).
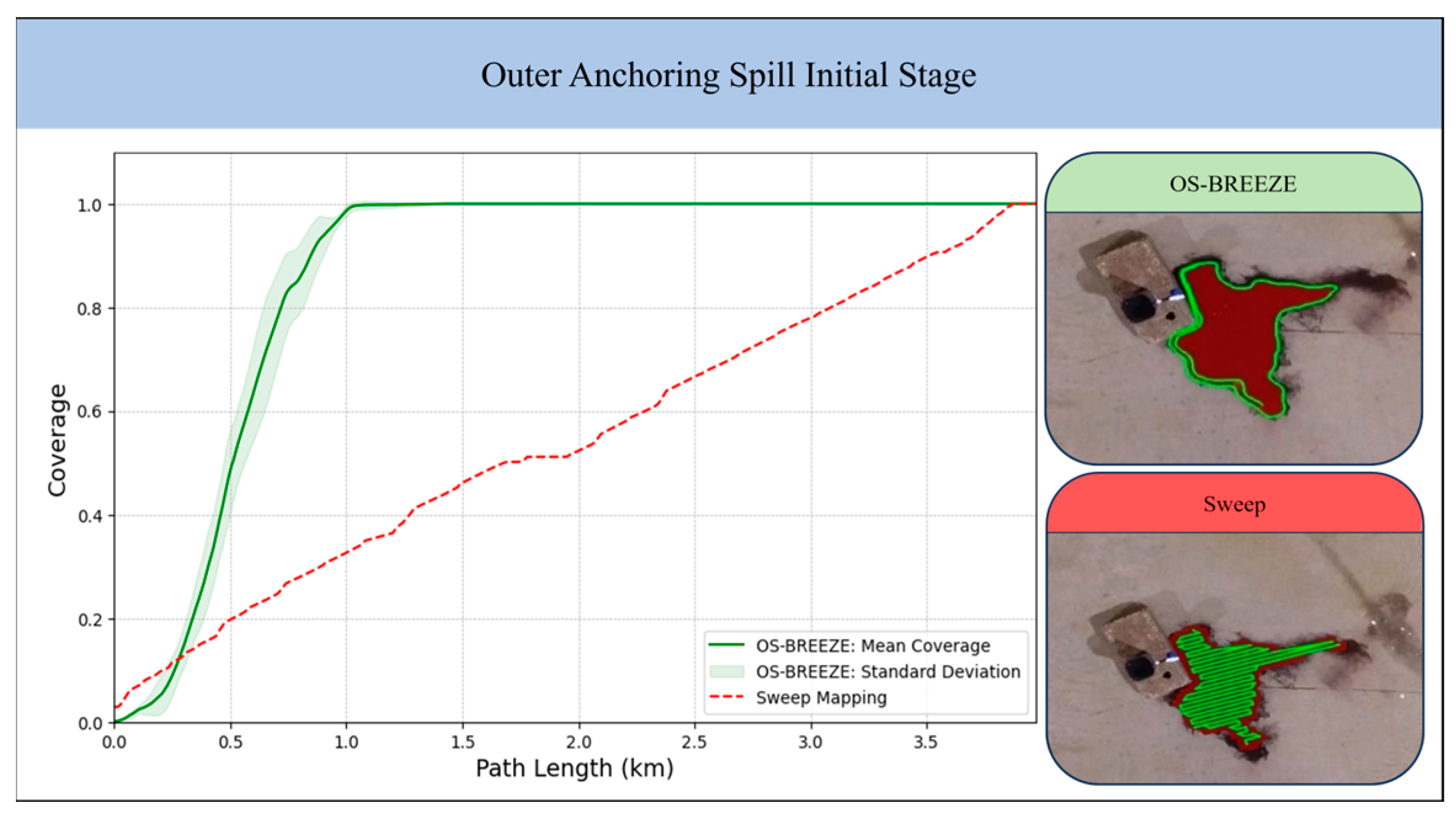
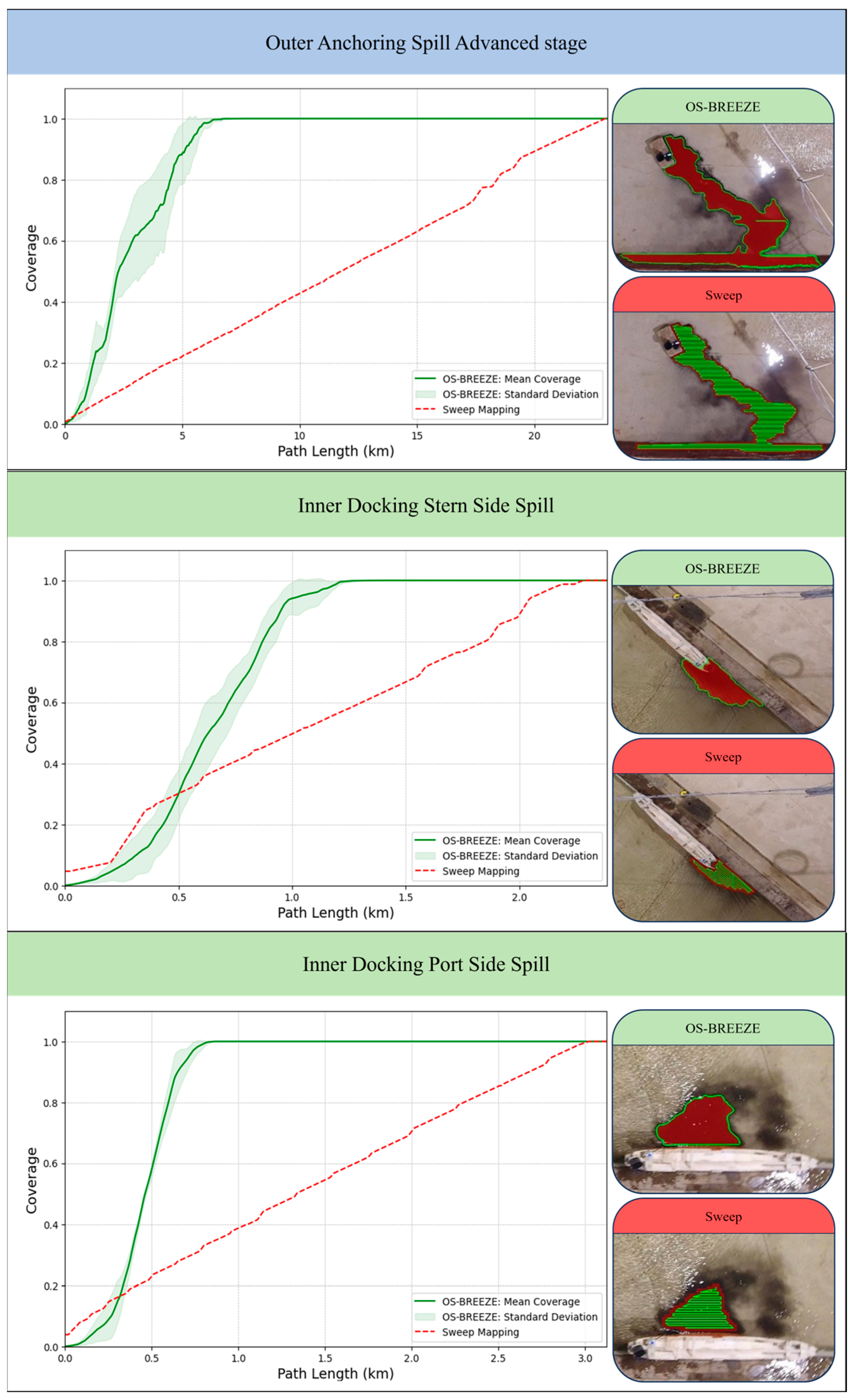
The experimental results for the Outer Anchoring scenario are visualized in
Figure 6, which compares the Sweep method with the OS-BREEZE. These results illustrate the differences in efficiency and coverage between the two methods through both graphical and visual data. OS-BREEZE is notable for its swift coverage rate and shorter path length in both the initial and advanced stages, suggesting a higher efficiency. In contrast, the Sweep method presents a slower coverage rate, indicating the need for a longer path to achieve similar coverage. The initial stage results specifically highlight OS-BREEZE’s ability to fully cover the area with a
path, while Sweep requires about
, and this efficiency remains apparent despite the SD. In the advanced stage, OS-BREEZE maintains its lead with a path length of about
, in contrast to the Sweep’s substantially long
path.
Visually, the two images compare the implementation of each method. OS-BREEZE is depicted as following a direct and focused path in green, closely followed by the spill’s boundary. In contrast, the Sweep method is characterized by a systematic, alternating coverage pattern. A notable observation is that in the initial stage, the Sweep covers a small section to the right of the red zone that OS-BREEZE does not.
The Inner Docking scenarios, shown in
Figure 6, exhibit similar comparative results between the methods. In the Stern Side scenario, OS-BREEZE completes its coverage with a path length of about 1.5
, whereas the Sweep requires about 2.5
. In the Port Side scenario, OS-BREEZE’s path length is around 0.7
, much shorter than Sweep’s path of
. The graphs from both scenarios, underscored by
Table 1, reveal OS-BREEZE’s boundary-following path and Sweep’s incremental coverage approach.
5. Discussion and Conclusions
The research presented herein introduces the OS-BREEZE algorithm, a path-planning strategy adept at delineating the red zone of oil pollution both swiftly and accurately. The efficiency and accuracy of OS-BREEZE are rigorously evaluated through comparative analyses against the conventional sweep method. These analyses were conducted across four varied pollution scenarios within a port environment, as detailed in
Figure 6 and
Table 1. Evaluation metrics for the OS-BREEZE method include Precision, Recall, and F1-Score. The findings consistently demonstrate that OS-BREEZE necessitates a reduced path length for effective red zone monitoring, thereby indicating a substantial improvement in operational efficiency compared to the traditional sweep method. Notably, the algorithm achieves an accuracy rate of approximately ninety percent, as measured across key metrics such as Precision, Recall, and F1 Score, as shown in
Table 1. These results significantly underscore the precision and reliability of the OS-BREEZE algorithm, affirming its efficacy in conducting oil spill surveillance under diverse and challenging environmental conditions.
This study’s primary contribution, as highlighted by the findings, lies in the strategic approach of the OS-BREEZE algorithm, particularly its focus on delineating the boundary of the red zone of oil pollution. This approach contrasts with the conventional method that typically involves extensive coverage of the entire affected area. The novel strategy employed by OS-BREEZE allows for a significant reduction in the time required for monitoring. By strategically avoiding dense sampling of the entire polluted zone and instead concentrating on mapping the perimeter of the pollution, OS-BREEZE provides a more focused and resource-efficient method for surveillance.
Furthermore, this research employs a synthetic oil spill experiment, which requires further study in certain challenging conditions that are not accounted for in the experimental design. The potential influence of the USV on the distribution of the nearby oil spill. This influence encompasses factors such as the USV’s potential inaccuracies in sensing capabilities, which may compromise the precision of estimation. Additionally, various marine environmental phenomena, including waves and foam, can also impact the accuracy of the USV’s operations.
Moreover, the study utilizes a simulated camera model designed to replicate the visual capabilities of a USV in the scaled model. This model aids in visualizing the surrounding area. However, in real-world scenarios, several critical factors related to the camera must be considered for a more accurate representation. These include the camera’s resolution, its positioning, and the projection of the imagery.
6. Future Work
In forthcoming research efforts, the objective is to refine and extend the present methodology to facilitate a collaborative interface between UAV and USV, aiming to enhance overall efficacy. Whereas the current investigation is centered on monitoring applications, prospective studies will develop coordinated strategies for detecting and cleansing oil pollution in port areas. Incorporating oil spill detection and response functionalities into this collaborative framework is anticipated to significantly advance marine ecosystem protection and reduce the detrimental environmental impact of oil spillages.
Furthermore, this research will be expanded to investigate the boundary-following strategy under realistic marine conditions, including challenges such as foam and waves, which can only be authentically evaluated in an actual marine environment. A small-scale experiment will be developed to facilitate this investigation, utilizing a compact USV equipped with an onboard camera. This experimental setup is designed to examine various critical factors comprehensively. These include the impacts of camera positioning and tilting on the visual capabilities, potential inaccuracies in the USV’s sensing capabilities, and the influence of the USV’s presence on the distribution of the oil spill in its vicinity. By conducting these investigations, the study aims to gain a deeper understanding of how these elements interact and affect the efficiency and accuracy of the oil spill monitoring process.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}