
Optimizing Sensor Placement for Temperature Mapping during Ablation Procedures

 ,
,  ,
,  ,
,  ,
,  and
and
Abstract
1. Introduction
1.1. Fundamentals and State of the Art
1.2. Contribution
2. Materials and Methods
2.1. Key Optimization Concepts
2.2. Problem Formulation
2.3. Approximated Solution Strategy
3. Results
3.1. Generation of Reference Temperature Maps Using Simulation Software
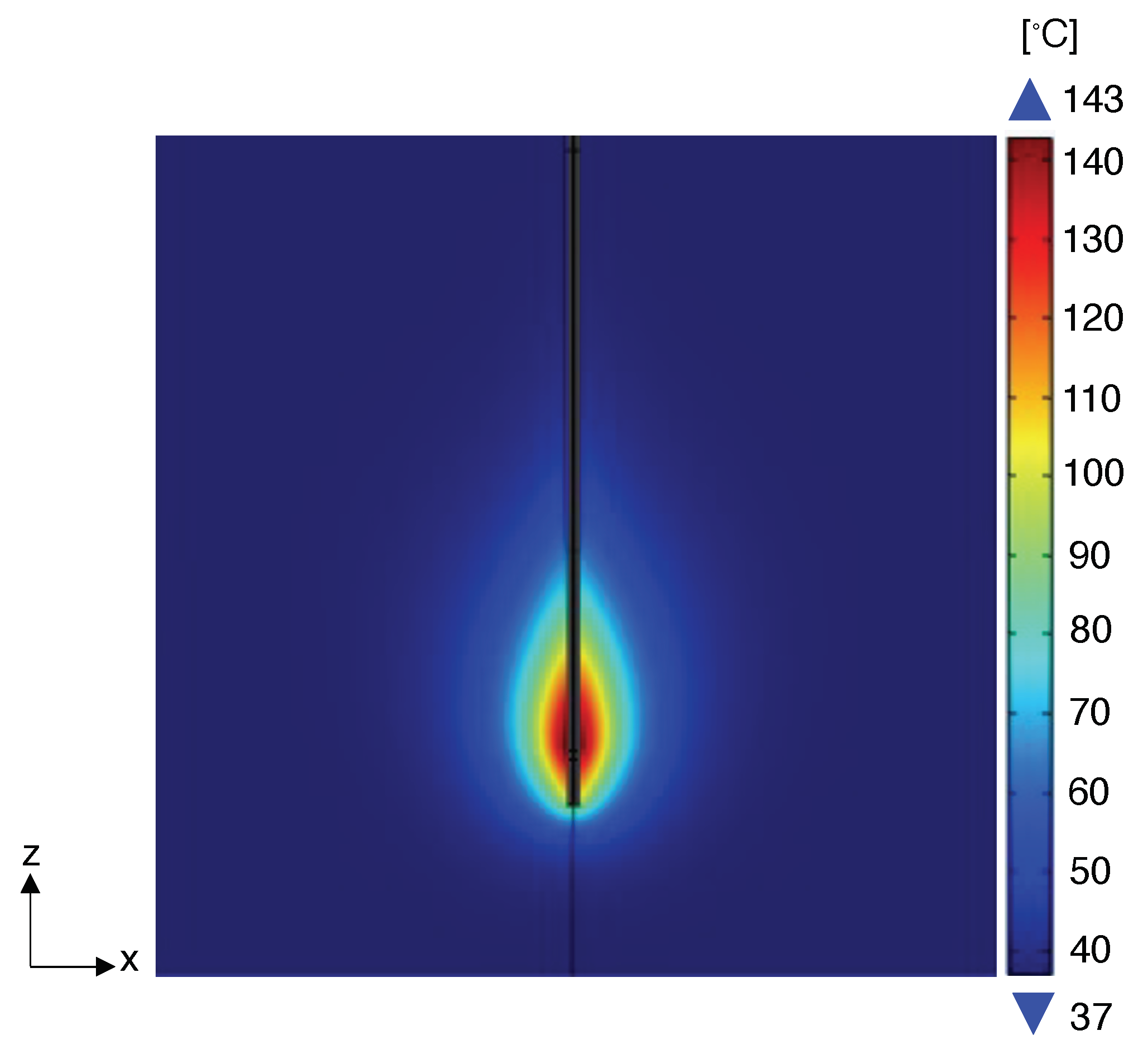
- represents the heat flow resulting from the blood perfusion in the tissue. It is determined by parameters, such as the blood density (), the specific heat of the blood (), and the rate of the blood perfusion () listed in Table 2.
- represents the heat generated by the MW source, known as dielectric heating, and caused by the continuous reorientation of water molecules in response to the applied magnetic field.The value of Qs can be expressed as a function of the tissue density and the specific absorption rate (SAR), which quantifies the amount of electromagnetic energy absorbed per unit mass of tissue.
- accounts for the heat produced by the metabolic processes within the tissue. This contribution is considered negligible compared to the other heat contributions in the equation.
3.2. Investigation of Algorithm Performance: Application to Simulated Temperature Map
4. Conclusions and Future Work
Limitations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rossi, S.; Di Stasi, M.; Buscarini, E.; Quaretti, P.; Garbagnati, F.; Squassante, L.; Paties, C.T.; Silverman, D.E.; Buscarini, L. Percutaneous RF interstitial thermal ablation in the treatment of hepatic cancer. AJR Am. J. Roentgenol. 1996, 167, 759–768. [Google Scholar] [CrossRef] [PubMed]
- Skinner, M.G.; Iizuka, M.N.; Kolios, M.C.; Sherar, M.D. A theoretical comparison of energy sources-microwave, ultrasound and laser-for interstitial thermal therapy. Phys. Med. Biol. 1998, 43, 293–301. [Google Scholar]
- Rhim, H.; Dodd, G.D., III. Radiofrequency thermal ablation of liver tumors. J. Clin. Ultrasound 1999, 27, 221–229. [Google Scholar] [CrossRef]
- Livraghi, T.; Solbiati, L.; Meloni, M.F.; Gazelle, G.S.; Halpern, E.F.; Goldberg, S.N. Treatment of focal liver tumors with percutaneous radio-frequency ablation: Complications encountered in a multicenter study. Radiology 2003, 226, 441–451. [Google Scholar] [CrossRef] [PubMed]
- Habash, R.W.; Bansal, R.; Krewski, D.; Alhafid, H.T. Thermal therapy, Part III: Ablation techniques. Crit. Rev. Biomed. Eng. 2007, 35, 37–121. [Google Scholar] [CrossRef]
- Knavel, E.M.; Brace, C.L. Tumor ablation: Common modalities and general practices. Tech. Vasc. Interv. Radiol. 2013, 16, 4. [Google Scholar] [CrossRef]
- Gangi, A.; Alizadeh, H.; Wong, L.; Buy, X.; Dietemann, J.L.; Roy, C. Osteoid osteoma: Percutaneous laser ablation and follow-up in 114 patients. Radiology 2007, 242, 293–301. [Google Scholar] [CrossRef]
- Ahmed, M.; Brace, C.L.; Lee, F.T., Jr.; Goldberg, S.N. Principles of and advances in percutaneous ablation. Radiology 2011, 258, 351. [Google Scholar] [CrossRef]
- Di Matteo, F.M.; Saccomandi, P.; Martino, M.; Pandolfi, M.; Pizzicannella, M.; Balassone, V.; Schena, E.; Pacella, C.M.; Silvestri, S.; Costamagna, G. Feasibility of EUS-guided Nd: YAG laser ablation of unresectable pancreatic adenocarcinoma. Gastrointest. Endosc. 2018, 88, 168–174. [Google Scholar]
- Goldberg, S.N. Radiofrequency tumor ablation: Principles and techniques. Eur. J. Ultrasound 2001, 13, 129–147. [Google Scholar] [CrossRef]
- Chu, K.F.; Dupuy, D.E. Thermal ablation of tumours: Biological mechanisms and advances in therapy. Nat. Rev. Cancer 2014, 14, 199–208. [Google Scholar] [PubMed]
- Guidance, D.I. Thermal ablation therapy for focal malignancy: A unified approach to underlying principles, techniques, and diagnostic imaging guidance. Am. J. Roentgenol. 2000, 174, 323–331. [Google Scholar]
- Pacella, C.M.; Breschi, L.; Bottacci, D.; Masotti, L. Physical principles of laser ablation. Image-Guid. Laser Ablation 2020, 7–18. [Google Scholar] [CrossRef]
- Stafford, R.J.; Fuentes, D.; Elliott, A.A.; Weinberg, J.S.; Ahrar, K. Laser-induced thermal therapy for tumor ablation. Crit. Rev. Biomed. Eng. 2010, 38, 79–100. [Google Scholar] [CrossRef] [PubMed]
- Pearce, J.A. Models for thermal damage in tissues: Processes and applications. Crit. Rev. Biomed. Eng. 2010, 38, 1–20. [Google Scholar] [CrossRef]
- Pearce, J.A. Relationship between Arrhenius models of thermal damage and the CEM 43 thermal dose. Energy-Based Treat. Tissue Assess. V 2009, 7181, 35–49. [Google Scholar]
- Chen, J.; Liu, B.; Zhang, H. Review of fiber Bragg grating sensor technology. Front. Optoelectron. China 2011, 4, 204–212. [Google Scholar] [CrossRef]
- Rieke, V. MR thermometry. Interv. Magn. Reson. Imaging 2011, 27, 376–390. [Google Scholar] [CrossRef]
- Bao, X.; Chen, L. Recent Progress in Distributed Fiber Optic Sensors. Sensors 2012, 12, 8601–8639. [Google Scholar]
- Rogers, A. Distributed Optical-Fibre Sensing. Meas. Sci. Technol. 1999, 10, R75. [Google Scholar]
- Lewis, M.A.; Staruch, R.M.; Chopra, R. Thermometry and ablation monitoring with ultrasound. Int. J. Hyperth. 2015, 31, 163–181. [Google Scholar] [CrossRef] [PubMed]
- Presti, D.L.; Massaroni, C.; Leitão, C.S.J.; Domingues, M.D.F.; Sypabekova, M.; Barrera, D.; Floris, I.; Massari, L.; Oddo, C.M.; Sales, S.; et al. Fiber bragg gratings for medical applications and future challenges: A review. IEEE Access 2020, 8, 156863–156888. [Google Scholar] [CrossRef]
- Samset, E.; Mala, T.; Ellingsen, R.; Gladhaug, I.; Søreide, O.; Fosse, E. Temperature measurement in soft tissue using a distributed fibre Bragg-grating sensor system. Minim. Invasive Ther. Allied Technol. 2001, 10, 89–93. [Google Scholar]
- De Tommasi, F.; Massaroni, C.; Grasso, R.F.; Carassiti, M.; Schena, E. Temperature monitoring in hyperthermia treatments of bone tumors: State-of-the-Art and future challenges. Sensors 2021, 21, 5470. [Google Scholar] [CrossRef] [PubMed]
- De Tommasi, F.; Massaroni, C.; Carnevale, A.; Presti, D.L.; De Vita, E.; Iadicicco, A.; Faiella, E.; Grasso, R.F.; Longo, U.G.; Campopiano, S.; et al. Fiber Bragg Grating Sensors for Temperature Monitoring During Thermal Ablation Procedure: Experimental Assessment of Artefact Caused by Respiratory Movements. IEEE Sens. J. 2021, 21, 13342–13349. [Google Scholar] [CrossRef]
- Geoghegan, R.; Ter Haar, G.; Nightingale, K.; Marks, L.; Natarajan, S. Methods of Monitoring Thermal Ablation of Soft Tissue Tumors–A Comprehensive Review. Med. Phys. 2022, 49, 769–791. [Google Scholar] [CrossRef] [PubMed]
- Jelbuldina, M.; Korobeinyk, A.; Korganbayev, S.; Tosi, D.; Dukenbayev, K.; Inglezakis, V.J. Real-time temperature monitoring in liver during magnetite nanoparticle-enhanced microwave ablation with fiber bragg grating sensors: Ex vivo analysis. IEEE Sens. J. 2018, 18, 8005–8011. [Google Scholar]
- De Vita, E.; Zaltieri, M.; De Tommasi, F.; Massaroni, C.; Faiella, E.; Zobel, B.B.; Iadicicco, A.; Schena, E.; Grasso, R.F.; Campopiano, S. Multipoint temperature monitoring of microwave thermal ablation in bones through fiber Bragg grating sensor arrays. Sensors 2020, 20, 3200. [Google Scholar] [CrossRef]
- De Vita, E.; De Tommasi, F.; Massaroni, C.; Iadicicco, A.; Faiella, E.; Carassiti, M.; Grasso, R.F.; Schena, E.; Campopiano, S. Investigation of the heat sink effect during microwave ablation in hepatic tissue: Experimental and numerical analysis. IEEE Sens. J. 2021, 21, 22743–22751. [Google Scholar] [CrossRef]
- Prasad, A.; Pant, S.; Srivatzen, S.; Asokan, S. A non-invasive breast cancer detection system using FBG thermal sensor array: A feasibility study. IEEE Sens. J. 2021, 21, 24106–24113. [Google Scholar] [CrossRef]
- Palumbo, G.; Iadicicco, A.; Tosi, D.; Verze, P.; Carlomagno, N.; Tammaro, V.; Ippolito, J.; Campopiano, S. Temperature profile of ex-vivo organs during radio frequency thermal ablation by fiber Bragg gratings. J. Biomed. Opt. 2016, 21, 117003. [Google Scholar] [CrossRef] [PubMed]
- Tosi, D.; Macchi, E.; Braschi, G.; Gallati, M.; Cigada, A.; Poeggel, S.; Leen, G.; Lewis, E. Monitoring of radiofrequency thermal ablation in liver tissue through fibre Bragg grating sensors array. Electron. Lett. 2014, 50, 981–983. [Google Scholar]
- Schena, E.; Tosi, D.; Saccomandi, P.; Lewis, E.; Kim, T. Fiber optic sensors for temperature monitoring during thermal treatments: An overview. Sensors 2016, 16, 1144. [Google Scholar]
- Saxena, I.F.; Hui, K.; Astrahan, M. Polymer coated fiber Bragg grating thermometry for microwave hyperthermia. Med. Phys. 2010, 37, 4615–4619. [Google Scholar] [PubMed]
- Zaltieri, M.; Allegretti, G.; Massaroni, C.; Schena, E.; Cauti, F.M. Fiber bragg grating sensors for millimetric-scale temperature monitoring of cardiac tissue undergoing radiofrequency ablation: A feasibility assessment. Sensors 2020, 20, 6490. [Google Scholar] [CrossRef] [PubMed]
- De Vita, E.; De Landro, M.; Massaroni, C.; Iadicicco, A.; Saccomandi, P.; Schena, E.; Campopiano, S. Fiber optic sensors-based thermal analysis of perfusion-mediated tissue cooling in liver undergoing laser ablation. IEEE Trans. Biomed. Eng. 2020, 68, 1066–1073. [Google Scholar] [CrossRef] [PubMed]
- Pham, N.T.; Lee, S.L.; Park, S.; Lee, Y.W.; Kang, H.W. Real-time temperature monitoring with fiber Bragg grating sensor during diffuser-assisted laser-induced interstitial thermotherapy. J. Biomed. Opt. 2017, 22, 045008. [Google Scholar] [CrossRef]
- Saccomandi, P.; Schena, E.; Caponero, M.A.; Di Matteo, F.M.; Martino, M.; Pandolfi, M.; Silvestri, S. Theoretical analysis and experimental evaluation of laser-induced interstitial thermotherapy in ex vivo porcine pancreas. IEEE Trans. Biomed. Eng. 2012, 59, 2958–2964. [Google Scholar]
- Namakshenas, P.; Bianchi, L.; Saccomandi, P. Fiber Bragg Grating sensors-based Assessment of Laser Ablation on Pancreas at 808 and 1064 nm using a Diffusing Applicator: Experimental and Numerical Study. IEEE Sens. J. 2023, 23, 18267–18275. [Google Scholar] [CrossRef]
- Ambastha, S.; Pant, S.; Umesh, S.; Vazhayil, V.; Asokan, S. Feasibility Study on Thermography of Embedded Tumor Using Fiber Bragg Grating Thermal Sensor. IEEE Sens. J. 2019, 20, 2452–2459. [Google Scholar] [CrossRef]
- Jelbuldina, M.; Korganbayev, S.; Seidagaliyeva, Z.; Sovetov, S.; Tuganbekov, T.; Tosi, D. Fiber Bragg Grating Sensor for Temperature Monitoring During HIFU Ablation of Ex Vivo Breast Fibroadenoma. IEEE Sens. Lett. 2019, 3, 1–4. [Google Scholar] [CrossRef]
- Abd Raziff, H.H.; Tan, D.; Lim, K.S.; Yeong, C.H.; Wong, Y.H.; Abdullah, B.J.J.; Ahmad, H. A temperature-controlled laser hot needle with grating sensor for liver tissue tract ablation. IEEE Trans. Instrum. Meas. 2020, 69, 7119–7124. [Google Scholar] [CrossRef]
- Gassino, R.; Liu, Y.; Konstantaki, M.; Vallan, A.; Pissadakis, S.; Perrone, G. A fiber optic probe for tumor laser ablation with integrated temperature measurement capability. J. Light. Technol. 2016, 35, 3447–3454. [Google Scholar]
- Gassino, R.; Perrone, G.; Vallan, A. Temperature monitoring with fiber Bragg grating sensors in nonuniform conditions. IEEE Trans. Instrum. Meas. 2019, 69, 1336–1343. [Google Scholar]
- Zangwill, W.I. Nonlinear Programming: A Unified Approach; Prentice-Hall: Hoboken, NJ, USA, 1969. [Google Scholar]
- Dorigo, M.; Stützle, T. Ant Colony Optimization: Overview and Recent Advances; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Dorigo, M.; Blum, C. Ant Colony Optimization Theory: A Survey. Theor. Comput. Sci. 2005, 344, 243–278. [Google Scholar] [CrossRef]
- MIDACO User Manual Version 6.0. Available online: http://www.midaco-solver.com/data/other/MIDACO_User_Manual.pdf (accessed on 10 January 2024).
- Schlueter, M. MIDACO Solver Software. 2018. Available online: http://www.midaco-solver.com/ (accessed on 2 January 2024).
- Lavezzi, G.; Guye, K.; Ciarcià, M. Nonlinear Programming Solvers for Unconstrained and Constrained Optimization Problems: A Benchmark Analysis. arXiv 2022, arXiv:2204.05297. [Google Scholar]
- Schlüter, M.; Gerdts, M.; Rückmann, J.J. A numerical study of MIDACO on 100 MINLP benchmarks. Optimization 2012, 61, 873–900. [Google Scholar]
- Schlueter, M.; Erb, S.O.; Gerdts, M.; Kemble, S.; Rückmann, J.J. MIDACO on MINLP space applications. Adv. Space Res. 2013, 51, 1116–1131. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Back, T. Evolutionary Algorithms in Theory and Practice: Evolution Strategies, Evolutionary Programming, Genetic Algorithms; Oxford University Press: Oxford, UK, 1996. [Google Scholar]
- Yhamyindee, P.; Phasukkit, P.; Tungjitkusolmon, S.; Sanpanich, A. Analysis of heat sink effect in hepatic cancer treatment near arterial for microwave ablation by using finite element method. In Proceedings of the 5th 2012 Biomedical Engineering International Conference, Ubon Ratchathani, Thailand, 5–7 December 2012; pp. 1–5. [Google Scholar]
- Tungjitkusolmun, S.; Staelin, S.T.; Haemmerich, D.; Tsai, J.Z.; Cao, H.; Webster, J.G.; Lee, F.T.; Mahvi, D.M.; Vorperian, V.R. Three-dimensional finite-element analyses for radio-frequency hepatic tumor ablation. IEEE Trans. Biomed. Eng. 2002, 49, 3–9. [Google Scholar]
- Keangin, P.; Wessapan, T.; Rattanadecho, P. Analysis of heat transfer in deformed liver cancer modeling treated using a microwave coaxial antenna. Appl. Therm. Eng. 2011, 31, 3243–3254. [Google Scholar] [CrossRef]
- Fallahi, H.; Prakash, P. Antenna designs for microwave tissue ablation. Crit. Rev. Biomed. Eng. 2018, 46, 495–521. [Google Scholar] [CrossRef] [PubMed]
- Prakash, P. Theoretical modeling for hepatic microwave ablation. Open Biomed. Eng. J. 2010, 4, 27. [Google Scholar]
- Keangin, P.; Rattanadecho, P. A numerical investigation of microwave ablation on porous liver tissue. Adv. Mech. Eng. 2018, 10, 1687814017734133. [Google Scholar] [CrossRef]
- Towoju, O.; Ishola, F.; Sanni, T.; Olatunji, O. Investigation of influence of coaxial antenna slot positioning on thermal efficiency in microwave ablation using COMSOL. J. Phys. Conf. Ser. 2019, 1378, 032066. [Google Scholar]
- Hines-Peralta, A.U.; Pirani, N.; Clegg, P.; Cronin, N.; Ryan, T.P.; Liu, Z.; Goldberg, S.N. Microwave ablation: Results with a 2.45-GHz applicator in ex vivo bovine and in vivo porcine liver. Radiology 2006, 239, 94–102. [Google Scholar] [PubMed]
- Pennes, H.H. Analysis of tissue and arterial blood temperatures in the resting human forearm. J. Appl. Physiol. 1948, 1, 93–122. [Google Scholar] [CrossRef]
- Singh, M.; Singh, T.; Soni, S. Pre-operative assessment of ablation margins for variable blood perfusion metrics in a magnetic resonance imaging based complex breast tumour anatomy: Simulation paradigms in thermal therapies. Comput. Methods Programs Biomed. 2021, 198, 105781. [Google Scholar] [CrossRef]
- Singh, M. Incorporating vascular-stasis based blood perfusion to evaluate the thermal signatures of cell-death using modified Arrhenius equation with regeneration of living tissues during nanoparticle-assisted thermal therapy. Int. Commun. Heat Mass Transf. 2022, 135, 106046. [Google Scholar] [CrossRef]
- Singh, M. Modified Pennes bioheat equation with heterogeneous blood perfusion: A newer perspective. Int. J. Heat Mass Transf. 2024, 218, 124698. [Google Scholar]
- Singh, M. Biological heat and mass transport mechanisms behind nanoparticles migration revealed under microCT image guidance. Int. J. Therm. Sci. 2023, 184, 107996. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Specific heat | 3450 J/(kg·K) |
| Density | 1079 kg/m3 |
| Thermal conductivity | 0.52 W/m·K |
| Relative permittivity | 43.03 |
| Electric conductivity | 1.69 S/m |
| Parameter | Value |
|---|---|
| Blood-specific heat | 3639 J/(kg·K) |
| Blood temperature | 37 °C |
| Rate of blood perfusion | 0.0064 1/s |
| Blood density | 1000 kg/m3 |
| Array | x | y | z | ||
|---|---|---|---|---|---|
| 1 | 1.2284 | −10 | 27.0191 | 5.4247 | 3.4017 |
| 2 | −9.0776 | 10 | 36.9959 | 2.6018 | 3.9627 |
| 3 | 7.1518 | 6.9311 | 14.8389 | 5.2708 | 1.7966 |
| 4 | 9.7561 | −10 | 20.1085 | 6.2832 | 2.4477 |
| Sensor Coordinates | |||
|---|---|---|---|
| Array 1 | x | y | z |
| FBG 1 | 1.2284 | −10 | 27.0191 |
| FBG 2 | −0.0143 | −8.561 | 26.5132 |
| FBG 3 | −0.6492 | −7.8261 | 26.2547 |
| FBG 4 | −1.4710 | −6.8745 | 25.9202 |
| FBG 5 | −4.1817 | −3.7361 | 24.8167 |
| FBG 6 | −5.0684 | −2.7094 | 24.4557 |
| FBG 7 | −5.9574 | −1.6802 | 24.0938 |
| FBG 8 | −6.7858 | −0.7210 | 23.7565 |
| FBG 9 | −7.4927 | 0.0975 | 23.4688 |
| FBG 10 | −10.0000 | 3.0005 | 22.4480 |
| Array 2 | x | y | z |
| FBG 1 | −9.0776 | 10 | 36.9959 |
| FBG 2 | −8.4931 | 9.6498 | 36.2640 |
| FBG 3 | −6.8704 | 8.6775 | 34.2323 |
| FBG 4 | −6.1875 | 8.2684 | 33.3773 |
| FBG 5 | −5.3956 | 7.7939 | 32.3858 |
| FBG 6 | −4.6420 | 7.3423 | 31.4422 |
| FBG 7 | −3.0937 | 6.4146 | 29.5036 |
| FBG 8 | −1.8154 | 5.6487 | 27.9031 |
| FBG 9 | −1.0663 | 5.1999 | 26.9652 |
| FBG 10 | −0.4818 | 4.8496 | 26.2333 |
| Array 3 | x | y | z |
| FBG 1 | 7.1518 | 6.9311 | 14.8389 |
| FBG 2 | 6.9088 | 7.3200 | 16.8348 |
| FBG 3 | 6.7469 | 7.5792 | 18.1649 |
| FBG 4 | 6.4497 | 8.0548 | 20.6054 |
| FBG 5 | 6.2684 | 8.3450 | 22.0951 |
| FBG 6 | 5.8874 | 8.9547 | 25.2242 |
| FBG 7 | 5.7085 | 9.2411 | 26.6939 |
| FBG 8 | 5.5040 | 9.5684 | 28.3735 |
| FBG 9 | 5.3563 | 9.8048 | 29.5871 |
| FBG 10 | 5.2343 | 10.0000 | 30.5886 |
| Array 4 | x | y | z |
| FBG 1 | 9.7561 | −10 | 20.1085 |
| FBG 2 | 8.6967 | −10 | 20.9899 |
| FBG 3 | 7.6801 | −10 | 21.8357 |
| FBG 4 | 6.6525 | −10 | 22.6907 |
| FBG 5 | 5.8837 | −10 | 23.3302 |
| FBG 6 | 3.2613 | −10 | 25.5120 |
| FBG 7 | 1.2898 | −10 | 27.1522 |
| FBG 8 | 0.5159 | −10 | 27.7961 |
| FBG 9 | −0.3176 | −10 | 28.4895 |
| FBG 10 | −1.3357 | −10 | 29.3366 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Santucci, F.; Nobili, M.; De Tommasi, F.; Lo Presti, D.; Massaroni, C.; Schena, E.; Oliva, G. Optimizing Sensor Placement for Temperature Mapping during Ablation Procedures. Sensors 2024, 24, 623. https://doi.org/10.3390/s24020623
Santucci F, Nobili M, De Tommasi F, Lo Presti D, Massaroni C, Schena E, Oliva G. Optimizing Sensor Placement for Temperature Mapping during Ablation Procedures. Sensors. 2024; 24(2):623. https://doi.org/10.3390/s24020623
Chicago/Turabian StyleSantucci, Francesca, Martina Nobili, Francesca De Tommasi, Daniela Lo Presti, Carlo Massaroni, Emiliano Schena, and Gabriele Oliva. 2024. "Optimizing Sensor Placement for Temperature Mapping during Ablation Procedures" Sensors 24, no. 2: 623. https://doi.org/10.3390/s24020623
APA StyleSantucci, F., Nobili, M., De Tommasi, F., Lo Presti, D., Massaroni, C., Schena, E., & Oliva, G. (2024). Optimizing Sensor Placement for Temperature Mapping during Ablation Procedures. Sensors, 24(2), 623. https://doi.org/10.3390/s24020623