High-Precision Positioning Stage Control Based on a Modified Disturbance Observer

Abstract
1. Introduction
2. Materials and Methods
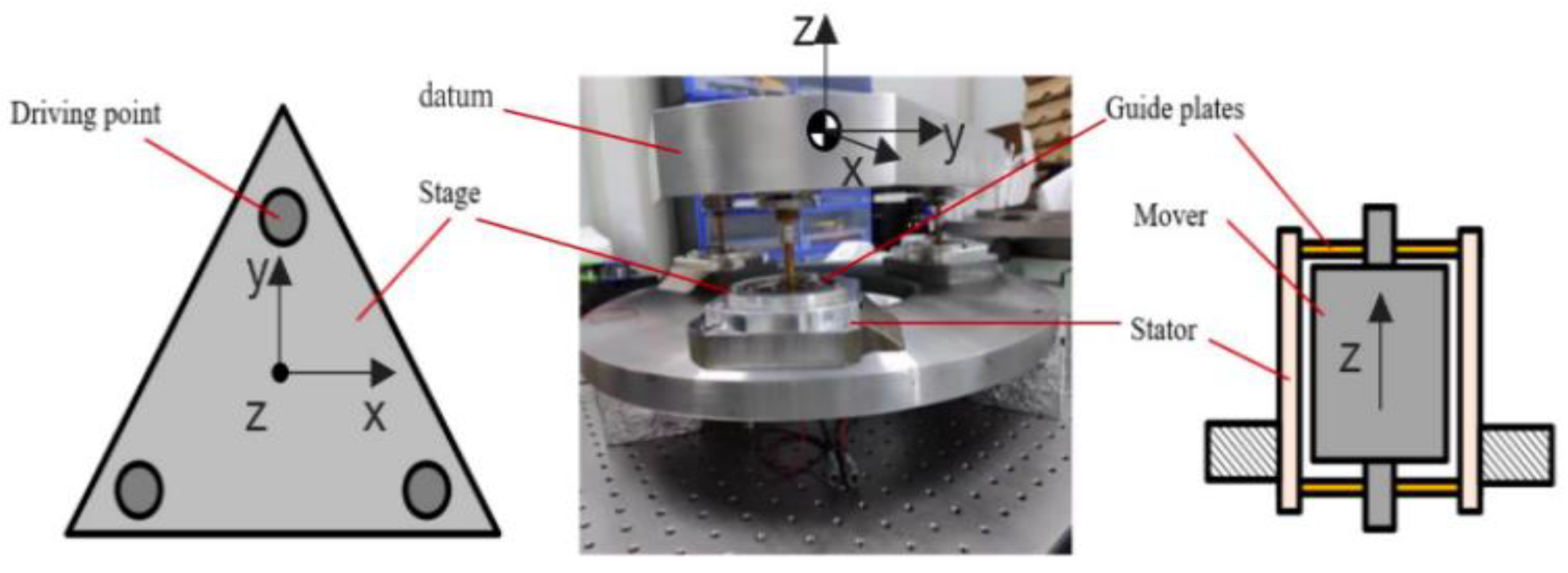
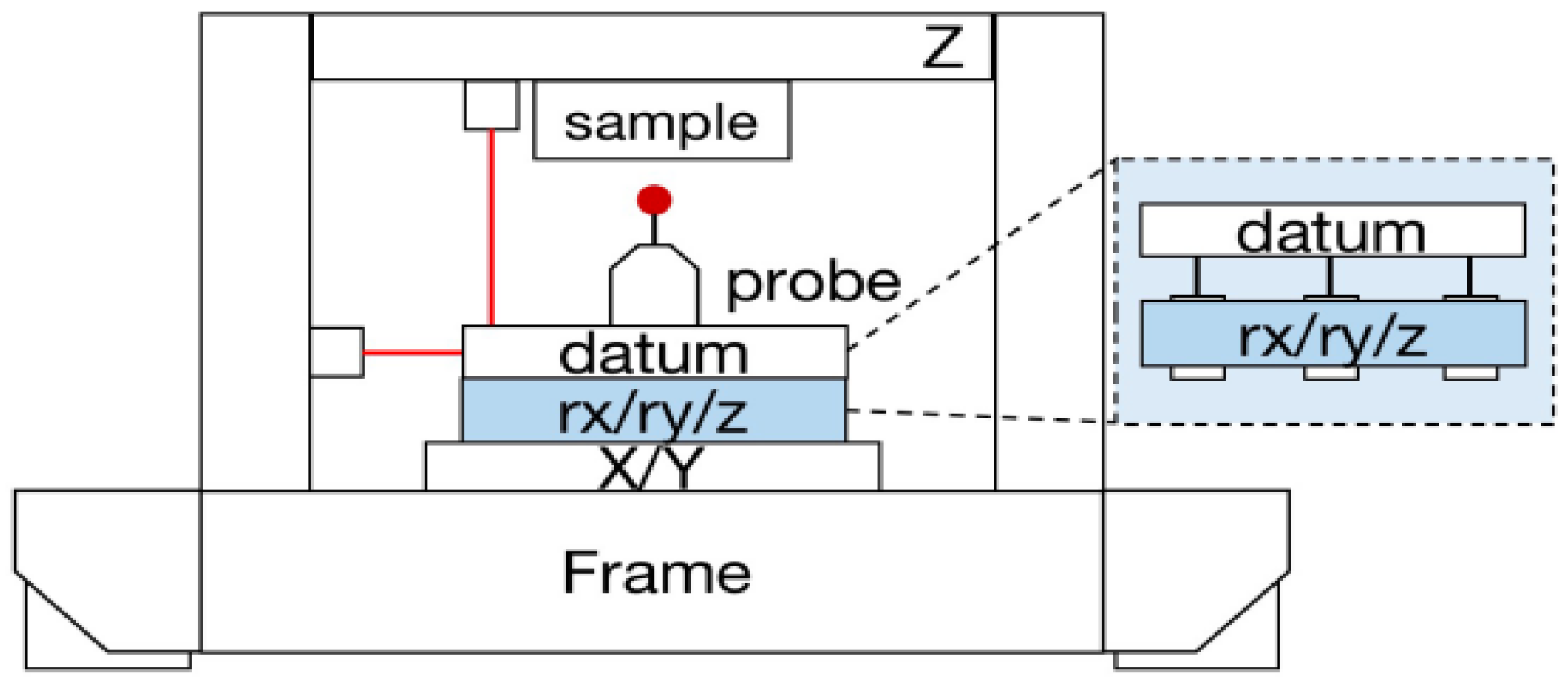
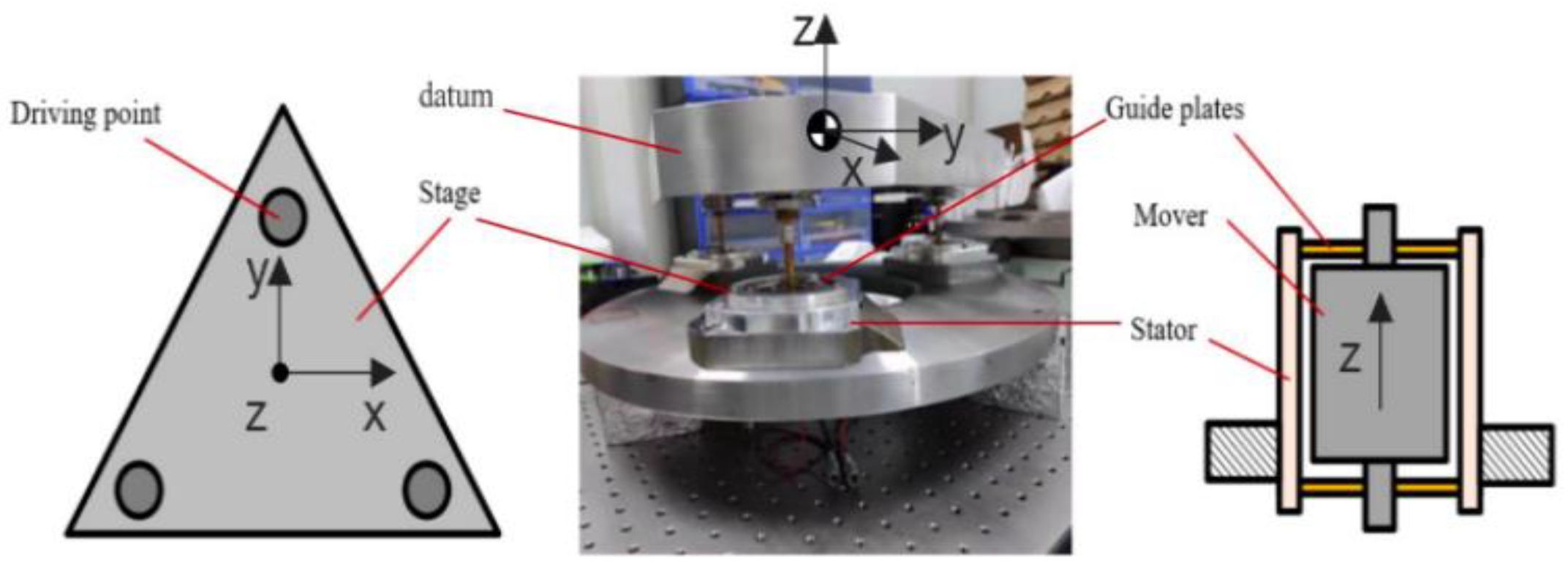
2.1. Plant Description
2.1.1. Lumped-Mass Model and Static Decoupling
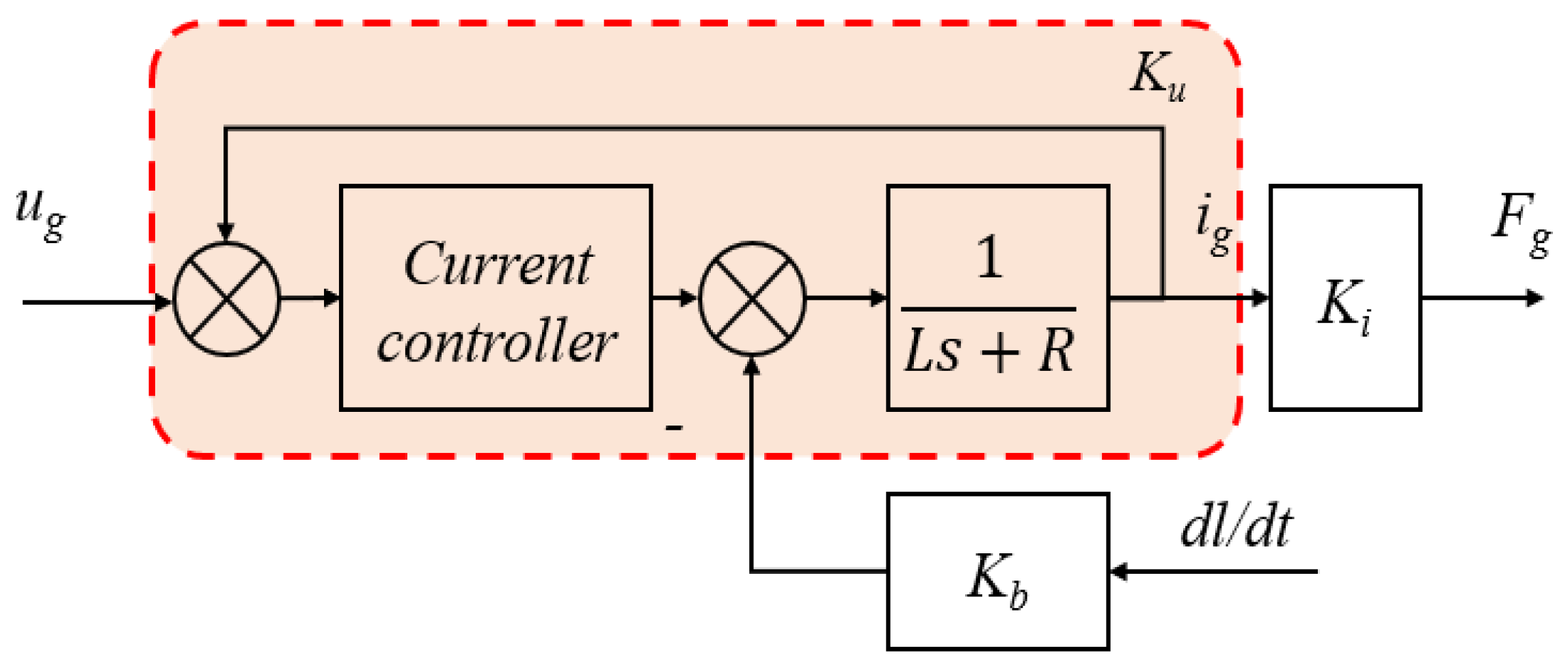
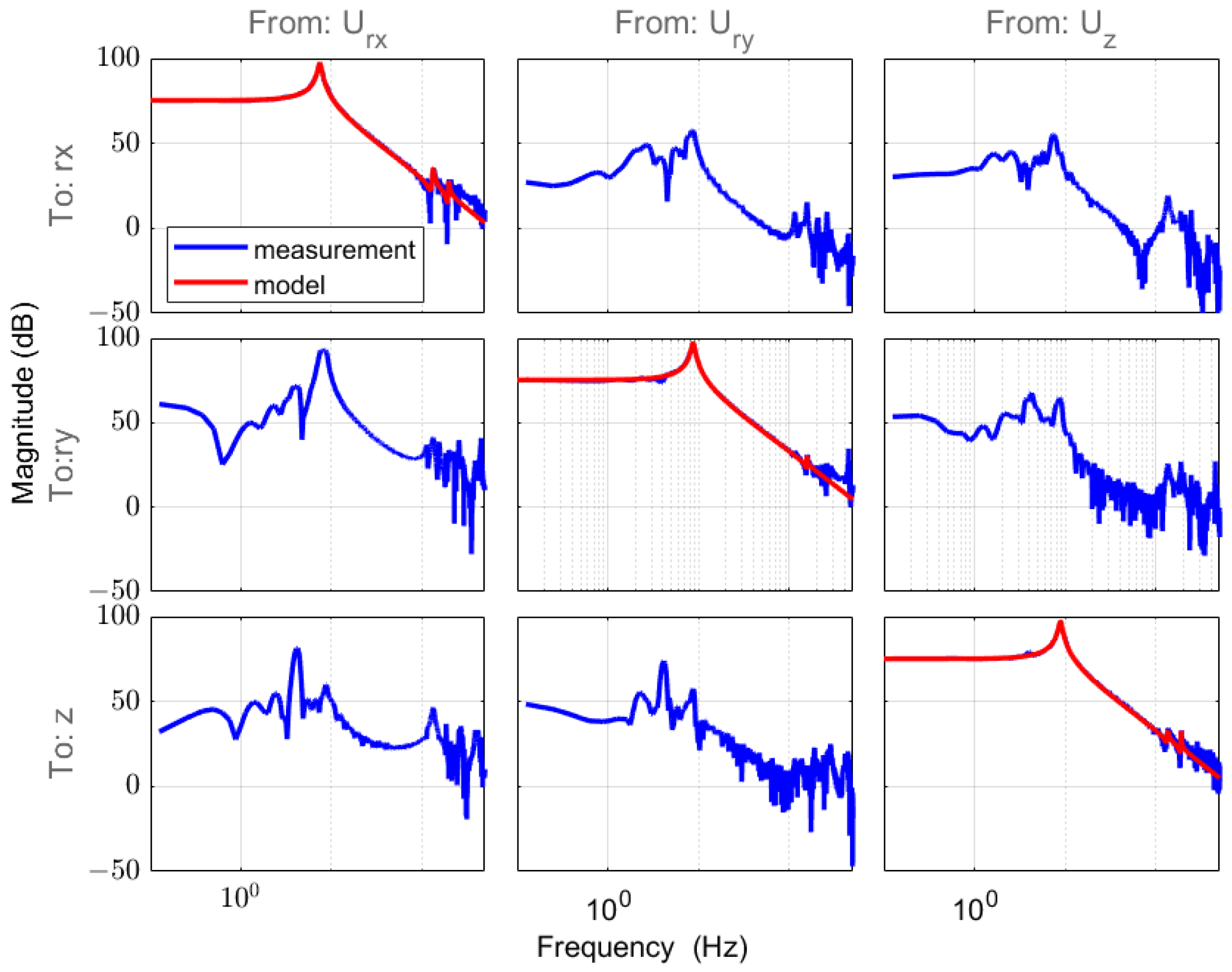
2.1.2. System Identification and SISO Controller Design
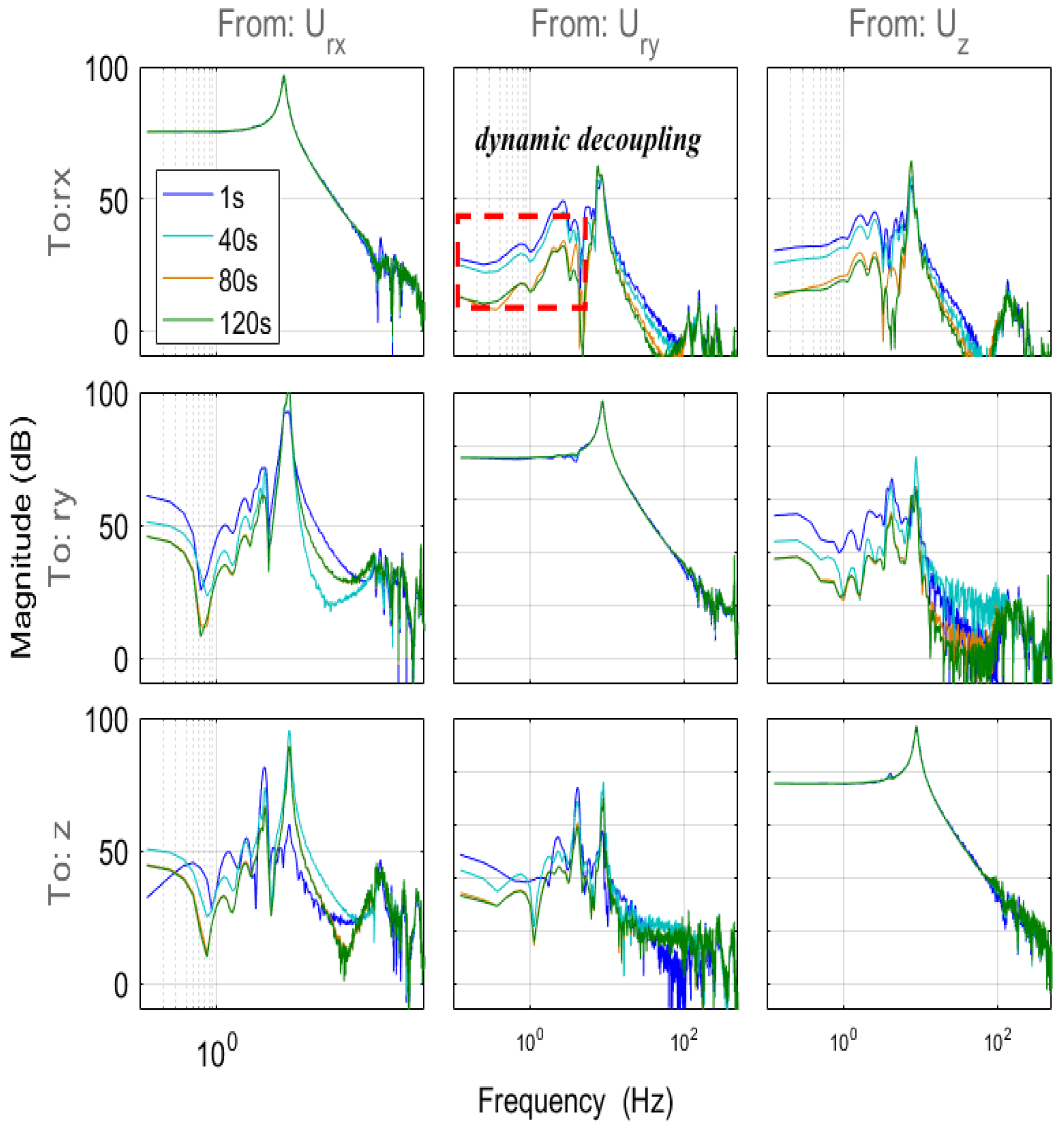
2.2. Dynamic Decoupling through MIMO DOB
2.2.1. DOB Design
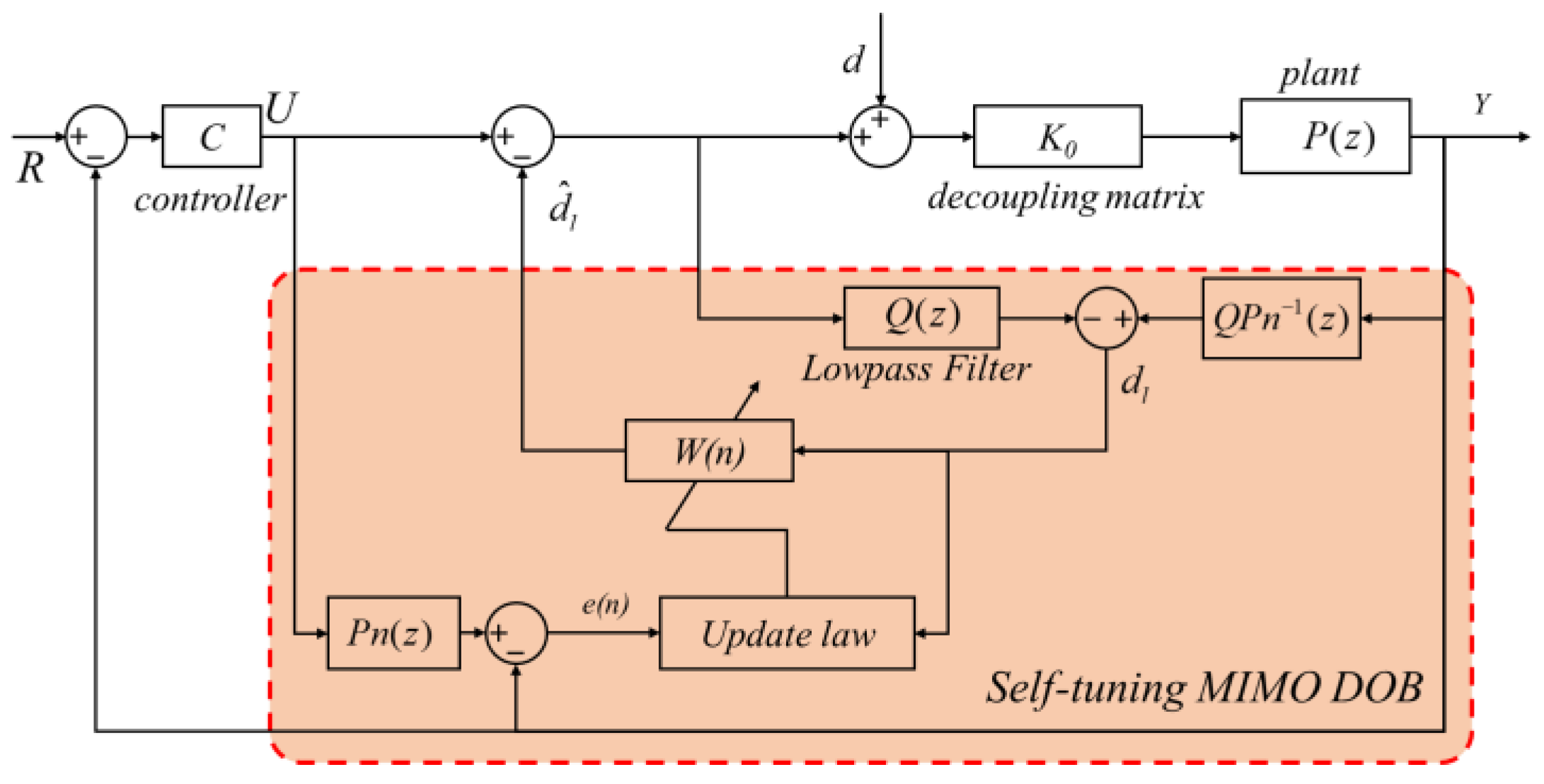
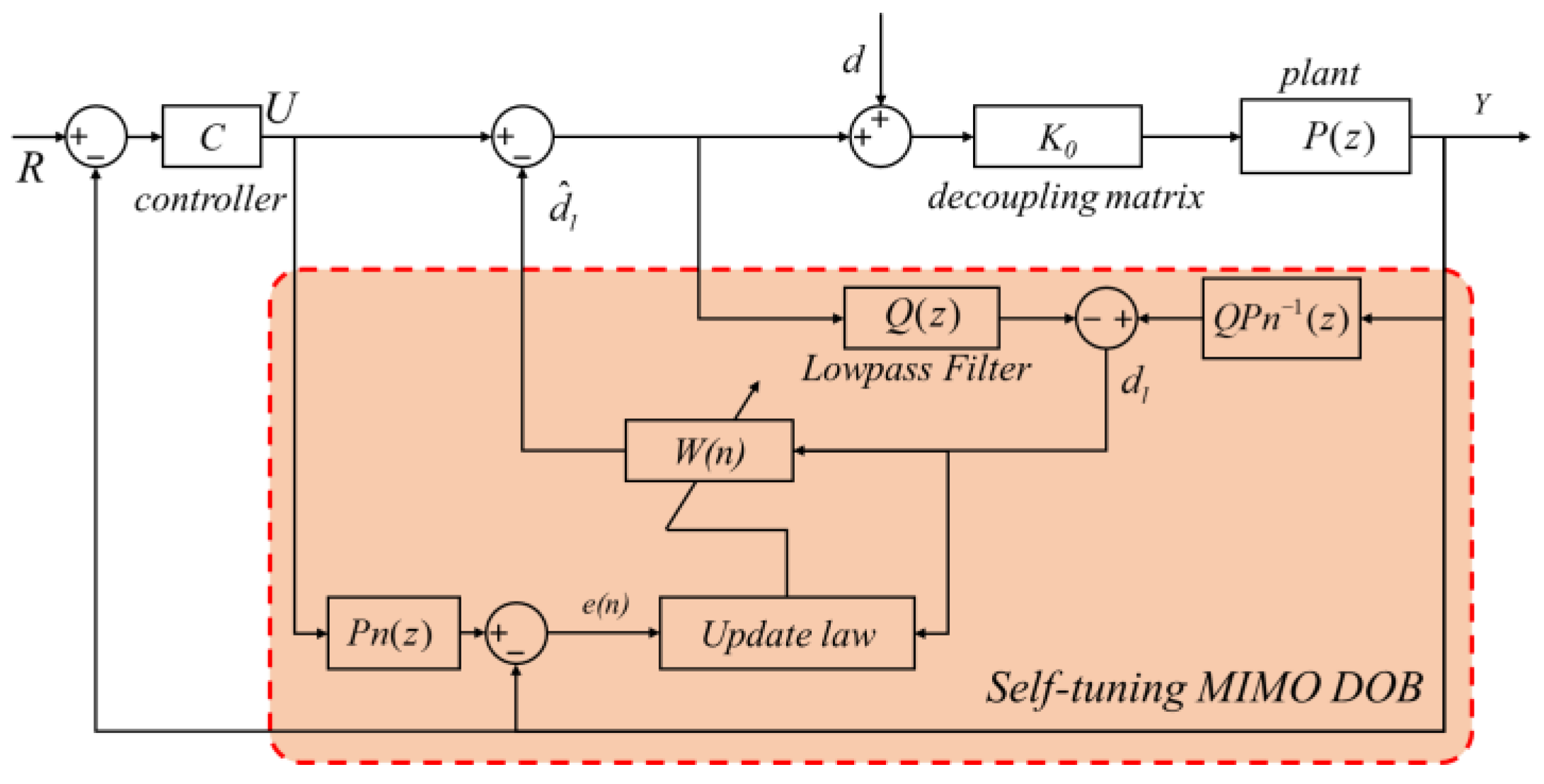
2.2.2. Self-Tuning MIMO DOB
3. Results
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Devasia, S.; Eleftheriou, E.; Moheimani, S.O.R. A Survey of Control issues in Nanopositioning. IEEE Trans. Control Syst. Technol. 2007, 15, 802–823. [Google Scholar] [CrossRef]
- Li, P.Z.; Wang, X.D.; Sui, Y.X.; Zhang, D.F.; Wang, D.F.; Dong, L.J.; Ni, M.Y. Piezoelectric Actuated Phase Shifter Based on External Laser Interferometer: Design, Control and Experimental Validation. Sensors 2017, 17, 838. [Google Scholar] [CrossRef] [PubMed]
- Ito, S.; Unger, S.; Schitter, G. Vibration Isolator Carrying Atomic Force Microscope’s Head. Mechatronics 2017, 44, 32–41. [Google Scholar] [CrossRef]
- Butler, H.; Simons, W. Position Control in Lithographic Equipment. In Proceedings of the ASPE Spring Topical Meeting MIT Laboratory for Manufacturing and Productivity Annual Summit: Precision Control for Advanced Manufacturing Systems, Cambridge, MA, USA, 21–23 April 2013; Volume 55, pp. 7–12. [Google Scholar]
- Van de Wal, M.; van Baars, G.; Sperling, F.; Bosgra, O. Multivariable H∞/μ Feedback Control Design for High-precision Wafer Stage Motion. Control Eng. Pract. 2002, 10, 739–755. [Google Scholar] [CrossRef]
- Al-Jodah, A.; Shirinzadeh, B.; Ghafarian, M.; Das, T.K.; Tian, Y.; Zhang, D.; Wang, F. Development and Control of a Large Range XYΘ Micropositioning Stage. Mechatronics 2020, 66, 102343. [Google Scholar] [CrossRef]
- Clark, L.; Shirinzadeh, B.; Bhagat, U.; Smith, J.; Zhong, Y. Development and Control of a Two DOF Linear-Angular Precision Positioning Stage. Mechatronics 2015, 32, 34–43. [Google Scholar] [CrossRef]
- Gunnarsson, S.; Collignon, V.; Rousseaux, O. Tuning of a Decoupling Controller for a 2×2 System Using Iterative Feedback Tuning. Control Eng. Pract. 2003, 11, 1035–1041. [Google Scholar] [CrossRef]
- Kerber, F.; Hurlebaus, S.; Beadle, B.M.; Stöbener, U. Control Concepts for an Active Vibration Isolation System. Mech. Syst. Signal Process. 2007, 21, 3042–3059. [Google Scholar] [CrossRef]
- Heertjes, M.F.; van Engelen, A.J.P.; Steinbuch, M. Optimized Dynamic Decoupling in Active Vibration Isolation. IFAC Proc. Vol. 2010, 43, 293–298. [Google Scholar] [CrossRef]
- Heertjes, M.; Van Engelen, A. Minimizing Cross-talk in High-precision Motion Systems Using Data-based Dynamic Decoupling. Control Eng. Pract. 2011, 19, 1423–1432. [Google Scholar] [CrossRef]
- Ito, S.; Cigarini, F.; Unger, S.; Schitter, G. Flexure Design for Precision Positioning Using Low-stiffness Actuators. IFAC-PapersOnLine 2016, 49, 200–205. [Google Scholar] [CrossRef]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2016, 63, 1083–1095. [Google Scholar] [CrossRef]
- Nozaki, T.; Mizoguchi, T.; Ohnishi, K. Decoupling Strategy for Position and Force Control Based on Modal Space Disturbance Observer. IEEE Trans. Ind. Electron. 2014, 61, 1022–1032. [Google Scholar] [CrossRef]
- Huang, Y.; Xue, W. Active Disturbance Rejection Control: Methodology and Theoretical Analysis. ISA Trans. 2014, 53, 963–976. [Google Scholar] [CrossRef]
- Ju, G.; Liu, S.; Wei, K.; Ding, H.; Wang, C. A Parameter Self-Tuning Decoupling Controller Based on an Improved ADRC for Tension Systems. Appl. Sci. 2023, 13, 11085. [Google Scholar] [CrossRef]
- Heertjes, M.F. Data-based Motion Control of Wafer Scanners. IFAC-PapersOnLine 2016, 49, 1–12. [Google Scholar] [CrossRef]
- Witvoet, G.; Doelman, N.; den Breeje, R. Primary Mirror Control for Large Segmented Telescopes: Combining High Performance with Robustness. SPIE Proc. Ground-Based Airborne Telesc. 2016, 9906, 990611. [Google Scholar] [CrossRef]
- Chen, Q.; Li, L.; Wang, M.; Pei, L. The Precise Modeling and Active Disturbance Rejection Control of Voice Coil Motor in High Precision Motion Control System. Appl. Math. Modell. 2015, 39, 5936–5948. [Google Scholar] [CrossRef]
- Thier, M.; Saathof, R.; Sinn, A.; Hainisch, R.; Schitter, G. Six Degree of Freedom Vibration Isolation Platform for In-line Nano-metrology. IFAC-PapersOnLine 2016, 49, 149–156. [Google Scholar] [CrossRef]
- Huang, Y.M.; Zhang, T.; Ma, J.G.; Fu, C.Y. Study on the control of a current loop in a high-accuracy tracking and control system. Opto-Electron. Eng. 2005, 32, 16–19. [Google Scholar] [CrossRef]
- System Identification Toolbox. 2020. Available online: https://www.mathworks.com/help/ident/index.html?s_tid=CRUX_topnav (accessed on 21 January 2021).
- Beijen, M.A.; Heertjes, M.F.; Hans, B.; Maarten, S. Disturbance feedforward control for active vibration isolation systems with internal isolator dynamics. J. Sound Vib. 2018, 436, 220–235. [Google Scholar] [CrossRef]
- Ohishi, K.; Nakao, M.; Ohnishi, K.; Miyachi, K. Microprocessor-controlled DC Motor for Load-insensitive Position Servo System. IEEE Trans. Ind. Electron. 1987, IE-34, 44–49. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Ohnishi, K. A Guide to Design Disturbance Observer. J. Dyn. Syst. Meas. Control 2014, 136, 021011. [Google Scholar] [CrossRef]
- Mizuochi, M.; Tsuji, T.; Ohnishi, K. Improvement of disturbance suppression based on disturbance observer. In Proceedings of the 9th IEEE International Workshop on Advanced Motion Control, Istanbul, Turkey, 27–29 March 2006. [Google Scholar] [CrossRef]
- Sariyildiz, E.; Ohnishi, K. A guide to design disturbance observer based motion control systems. In Proceedings of the 2021 IEEE International Conference on Mechatronics (ICM), Kashiwa, Japan, 7–9 March 2021. [Google Scholar] [CrossRef]
- Chen, W.H. Robust control of uncertain flexible spacecraft using disturbance observer based control strategies. In Proceedings of the 6th International ESA Conference on Guidance, Navigation and Control Systems, Loutraki, Greece, 17–20 October 2006. [Google Scholar]
- Umeno, T.; Kaneko, T.; Hori, Y. Robust Servosystem Design with Two Degrees of Freedom and its Application to Novel Motion Control of Robot Manipulators. IEEE Trans. Ind. Electron. 1993, 40, 473–485. [Google Scholar] [CrossRef]
- Li, X.; Wang, L.; Xia, X.; Liu, Y.; Zhang, B. Iterative learning-based negative effect compensation control of disturbance to improve the disturbance isolation of system. Sensors 2022, 22, 3464. [Google Scholar] [CrossRef]
- Qian, Y. A New Variable Step Size Algorithm Applied in LMS Adaptive Signal Processing. In Proceedings of the 28th Chinese Control and Decision Conference CCDC, Yinchuan, China, 28–30 May 2016; Volume 2016, pp. 4326–4329. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
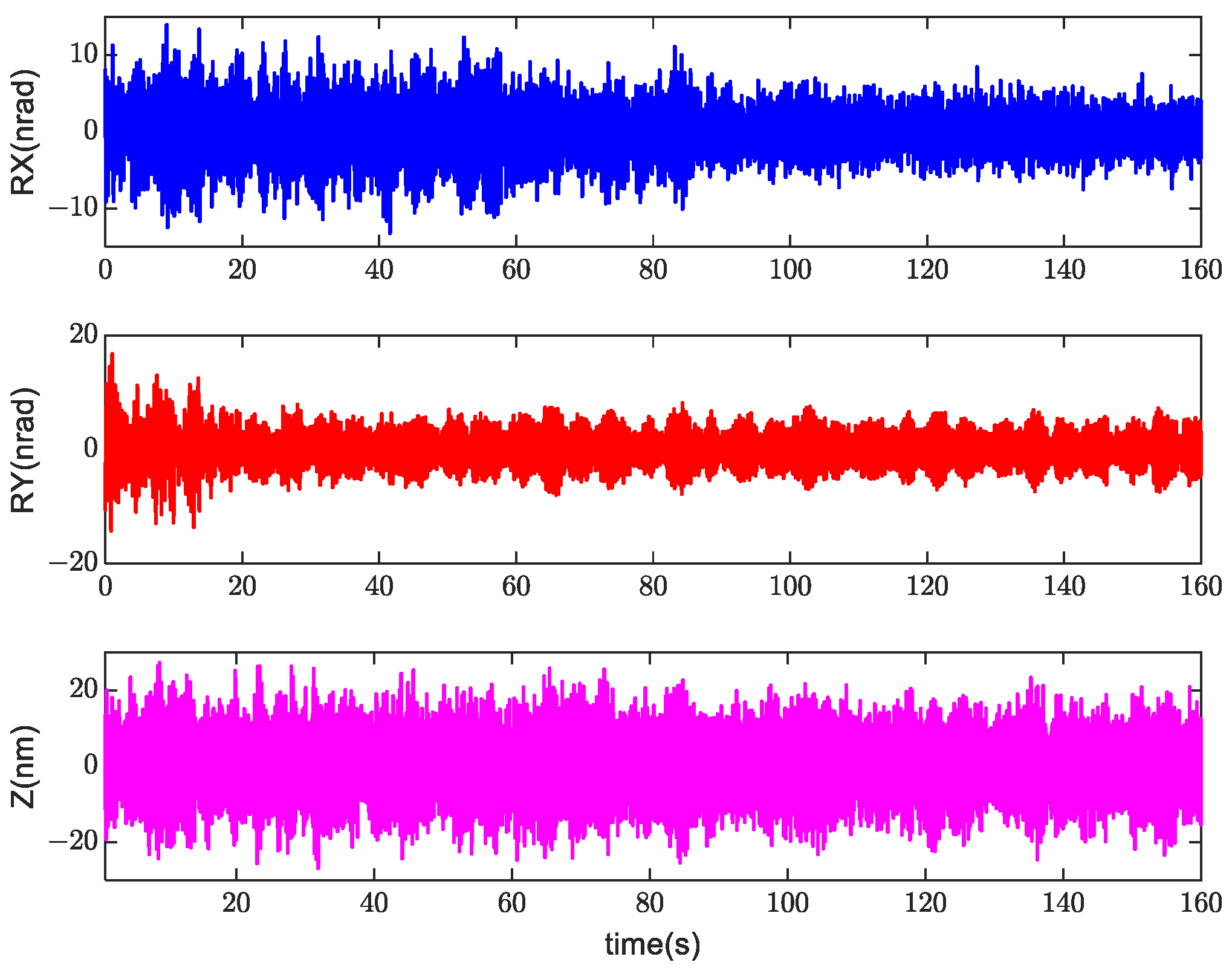
| RX (nrad) | RY (nrad) | Z (nm) | |
|---|---|---|---|
| Before adaptive tuning | 3.61 | 5.65 | 6.88 |
| After adaptive tuning | 1.95 | 2.40 | 6.44 |
| Reduced position error | 46% | 58% | 6% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Li, Q.; Zhou, F.; Zhang, J. High-Precision Positioning Stage Control Based on a Modified Disturbance Observer. Sensors 2024, 24, 591. https://doi.org/10.3390/s24020591
Wang H, Li Q, Zhou F, Zhang J. High-Precision Positioning Stage Control Based on a Modified Disturbance Observer. Sensors. 2024; 24(2):591. https://doi.org/10.3390/s24020591
Chicago/Turabian StyleWang, Hui, Qiang Li, Feng Zhou, and Jingxu Zhang. 2024. "High-Precision Positioning Stage Control Based on a Modified Disturbance Observer" Sensors 24, no. 2: 591. https://doi.org/10.3390/s24020591
APA StyleWang, H., Li, Q., Zhou, F., & Zhang, J. (2024). High-Precision Positioning Stage Control Based on a Modified Disturbance Observer. Sensors, 24(2), 591. https://doi.org/10.3390/s24020591