1. Introduction
Tuned mass damper (TMD) technology has its origins in the early 1900s [
1] and is characterized by mechanical simplicity, cost effectiveness and reliability. The two basic fields of application are civil engineering for motion control (bridges, towers, tall buildings) and mechanical engineering for vibration suppression in turbines and various types of machines. Early studies in optimized TMD design for harmonic motions can be traced to [
2] and random excitations to [
3]. In principle, TMDs can completely absorb vibrations at the selected tuned frequency, while material damping in the primary structure to which they are attached also plays a significant role in this respect, as it increases the frequency bandwidth of the response in the vicinity of the tuned frequency [
4].
Standard TMD design [
5] is basically an SDOF dynamic system comprising a spring and a damper connected to a small mass. As such, it is viewed as a secondary system attached to a primary system, i.e., to the structure itself. In terms of analysis, the latter may be represented as either a multi-degree-of-freedom (MDOF) system or as a continuous system. In either case, TMDs operate very close to the dominant mode of vibration of the primary structure, resulting in a substantial reduction in its dynamic responses. However, this vibration minimization is also dependent on the frequency content of the external loads, which implies that optimization is required in order for the TMD to operate in the most sensitive frequency band. Alternatively, nonlinear TMDs may be designed [
6] which exhibit a variable (i.e., load dependent) natural frequency. A classification [
7] of basic TMD technology distinguishes between (i) composite TMD design, (ii) distributed TMD design, (iii) MDOF TMD design and (iv) impact dampers in conjunction with a TMD. In terms of more recent applications, we mention a numerical investigation of the performance of a TMD in controlling the torsional vortex phenomenon for an aerodynamically streamlined twin-box girder suspension bridge [
8]. The TMD parameters were gauged in terms of controlling the torsional response of the suspension bridge, and an effective range was reached and compared with the output provided by a genetic algorithm. Among recent work on the use of TMDs for vibration suppression, we mention [
9], which examined a suspension bridge under the combined effect of wind and traffic [
10], which used the theory of generalized functions to formulate and solve the equations of motion for a viscoelastic Bernoulli–Euler beam with rotational joints and multiple supports under a moving force [
11], on the installation of two TMDs in a footbridge for pedestrian use, and [
12], which examined the coupled bridge-moving vehicle system with the possibility of using the latter component as a TMD.
As previously mentioned, for a discrete primary structure representation, the design philosophy is based on the dominant mode as derived from a finite element analysis. When considering a continuous mass distribution (i.e., a waveguide) model for the primary structure with an attached TMD, a number of modeling issues arise. In this case, the governing differential equations of motion are obtained using either the Lagrangian or extended Hamilton’s principle [
13]. It is then possible to proceed with an eigenvalue analysis to separate the modes of the combined system and tune the TMD accordingly. As far as TMD placement is concerned, most research articles focus on either cantilever beams or on beams with symmetric boundaries and geometric conditions. Thus, TMDs are placed at the top of the former category of structures and in the central span of the latter category, since this is where the dominant first vibration mode will yield maximum values for the kinematic variables. Although the basic design concept behind a TMD system is quite simple, its damping and stiffness parameter values are often determined through optimization [
14] by defining a suitable objective function with appropriate design constraints. For random loads, the variance in response can be selected as the objective function, while for stationary random loads, the power spectral density (PSD) function of the structural response can be used [
15]. Among the various solution strategies, we mention gradient-based optimization and global optimization.
In work published over the last thirty years, the focus has been on design objectives, on the effect of the mass ratio between primary and secondary structures, on different types of TMD designs and on the introduction of semi-active control mechanisms [
7]. Recent developments in TMD technology have focused on refining TMD design beyond the simple SDOF system such as (i) the attachment of a secondary beam structure; (ii) ball damper or pendulum types of dampers; (iii) semi-active/active TMD systems; (iv) tuned liquid column dampers; (v) variable orifice hydraulic actuators; (vi) active variable stiffness dampers; (vii) electrorheological/magnetorheological fluid dampers; and (ix) magnetorheological elastomer–tuned vibration absorbers. Also, recently, a 2DOF nonlinear energy sink was proposed to suppress the vibration of a simply supported beam subjected to large-amplitude excitation in the vicinity of its fundamental frequency [
6]. More specifically, the governing equation of the combined Bernoulli–Euler beam plus the nonlinear energy sink system was treated by Galerkin’s method, with the beam displacement written in terms of the generalized coordinates and the eigenfunctions of the stand-alone beam. The dimensionless equation of motion, after applying normality conditions along with the Euler–Lagrange equation, was solved by the complexification-averaging method, which is an approximate analytical solution for a two eigenmode expansion. This solution was compared with a numerical solution of the governing ordinary differential equations of motion using a Runge–Kutta method solver. In terms of results, it was found that at low excitation amplitudes, the SDOF nonlinear energy sink was more effective than 2DOF configuration in terms of resonant peak suppression and energy dissipation, while the reverse held true as the excitation amplitude increased. Finally, at high values of the nonlinear energy sink parameters, excitations make the system chaotic, but added damping reduces the unstable band and provides a stable response. Recent work along these lines is presented in [
16], suggesting the possibility of placing electromagnetic energy harvesters in a multi-story building under random vibrations as a means for converting vibratory energy into electric current and in [
17], proposing energy-regenerative TMDs placed in structures for power harvesting that could be used for running sensors for structural health monitoring purposes.
Regarding the vibration control of structures under the influence of moving loads, [
18] recently investigated the tuned mass inerter system (TMIS) as an alternative lightweight passive control device, which contains a suspended mass, a parallel-connected tuned spring and an inerter-based subsystem. The study focused on optimizing the TMIS for the vibration suppression of multi-span beams under moving load series using the Bubnov–Galerkin integration method. This was carried out in conjunction with modal superposition using a few pre-specified modes of the combined beam-TMIS system under a moving load series. Thus, a design strategy was proposed to achieve a targeted performance by decreasing the moving-load-induced resonant response. The optimization algorithm used the tuned mass ratio as the objective function, plus the dynamic response amplitude under different speed parameters as constraint conditions for a coupled single-span, simply supported beam with the attached TMIS. In sum, the design TMIS was tuned to the dominant mode of the primary structure in order to be effective.
The purpose of the present work is to investigate the dynamic response of a combined structural system comprising an SDOF oscillator placed near the center of a simply supported beam to act as a TMD for controlling vibrations, due to the passage of a heavy point mass. The key considerations in this SDOF design are (i) a mass that is at least an order of magnitude less than that of the beam and (ii) a natural frequency that is tuned close to the dominant frequency of the supporting system. Despite the fact TMDs have been in use for many decades now in buildings, bridges, pylons, etc., for minimizing the response of these structures to dynamic loads such as ground motions and wind-induced pressure, the control of a continuous dynamic system subjected to a heavy moving mass has not been thoroughly examined. The reason is that a heavy moving mass modifies the dynamic properties of a beam (primary system) during its passage, thus resulting in a time-dependent eigenvalue problem. Additional complications arise when an SDOF (secondary system) is attached to a beam for absorbing vibratory motion. The mathematical description of this coupled system is best handled by using energy considerations, while a solution is achieved by introducing generalized coordinates and using the Laplace transform with respect to time. Numerical results confirm vibratory energy absorption from the primary to the secondary system, despite the fact that the latter system lacks a dedicated damper and material damping is provided by the spring element only. Furthermore, these results are validated against experimental evidence using a simply supported model beam with hooks at the center span where the SDOF mechanism is attached. This way, it was possible to measure the beam’s response in the absence and then in the presence of the TMD, as its span was traversed by a heavy sliding mass. Given the fact that this simple, sub-optimal TMD helped to minimize the magnitude of vibrations exhibited by their supporting structure, a future goal for this research effort is to incorporate passive control within a structural health monitoring (SHM) environment so as to devise better ways to extend the useful service life of various categories of civil engineering infrastructure.
2. Optimum TMD Design
The performance of TMDs relies on a tuning process [
4], in which their material parameters are optimized for one or several objectives. For this purpose, several formulations and numerical optimization methods have been developed. However, a given closed-form formulation may not be suitable for reaching a desired objective, as numerical optimization methods must be applied for different systems. For this reason, optimum TMD parameters such as fundamental period and damping ratio can also be estimated by using machine learning techniques [
19]. Optimum expressions for the frequency
and damping ratio
for TMD design were proposed in [
13] for harmonic motions and on the assumption that the primary structure is modeled as an SDOF system, followed by results derived in [
14] for random vibrations. Furthermore, Ref. [
20] examined optimum parameters of TMD, as gauged by their effectiveness in reducing accelerations and displacements caused by different earthquake excitations, on both SDOF and MDOF structures containing various numbers of TMD. Finally, Ref. [
21] used an optimization method labeled ‘particle swarm’ to derive a set of TMD optimal values. All these results are reproduced in
Table 1 and were further evaluated in [
19], which also presented three new simplified equations for the optimal TMD frequency and damping ratio that were developed by using curve fitting of artificial neural network model results. In this last publication, the performance of the optimum TMD used in ten-story and forty-story frames was numerically evaluated by time history analyses for a set of twenty-two recorded seismic motions.
In essence, sufficiently realistic results cannot be obtained through classical calculations of the most suitable TMD parameters, since many problem variables are at work: (i) the type and number of TMD(s) used, (ii) the type of primary structure to which the TMD(s) are attached, (iii) the type and number of excitation(s), and (iv) optimization criteria, which can either address kinematic response minimization or the minimization of energies in the combined structural system. For more accurate results, metaheuristic methods have been employed for the optimization of various types of TMDs that have been developed, and this includes techniques such as ‘colony optimization’, ‘particle swarm’ optimization, ‘harmony search’ algorithms, genetic algorithms, gravitational algorithms, etc.; see [
19] for a review. Information regarding optimum TMD design can be found in
Table 1, where
is the mass ratio between the TMD and the primary SDOF structure, which has a natural frequency
and material damping ratio
, while the optimized frequency, mass and damping coefficient of the TMD are
,
and
, respectively. Ref. [
22] discusses the problem of balancing the reduction in the structural response with the amplitude of the TMD stroke, an issue that invariably leads to semi-active TMD design.
3. Coupled Primary–Secondary System with a Moving Heavy Mass
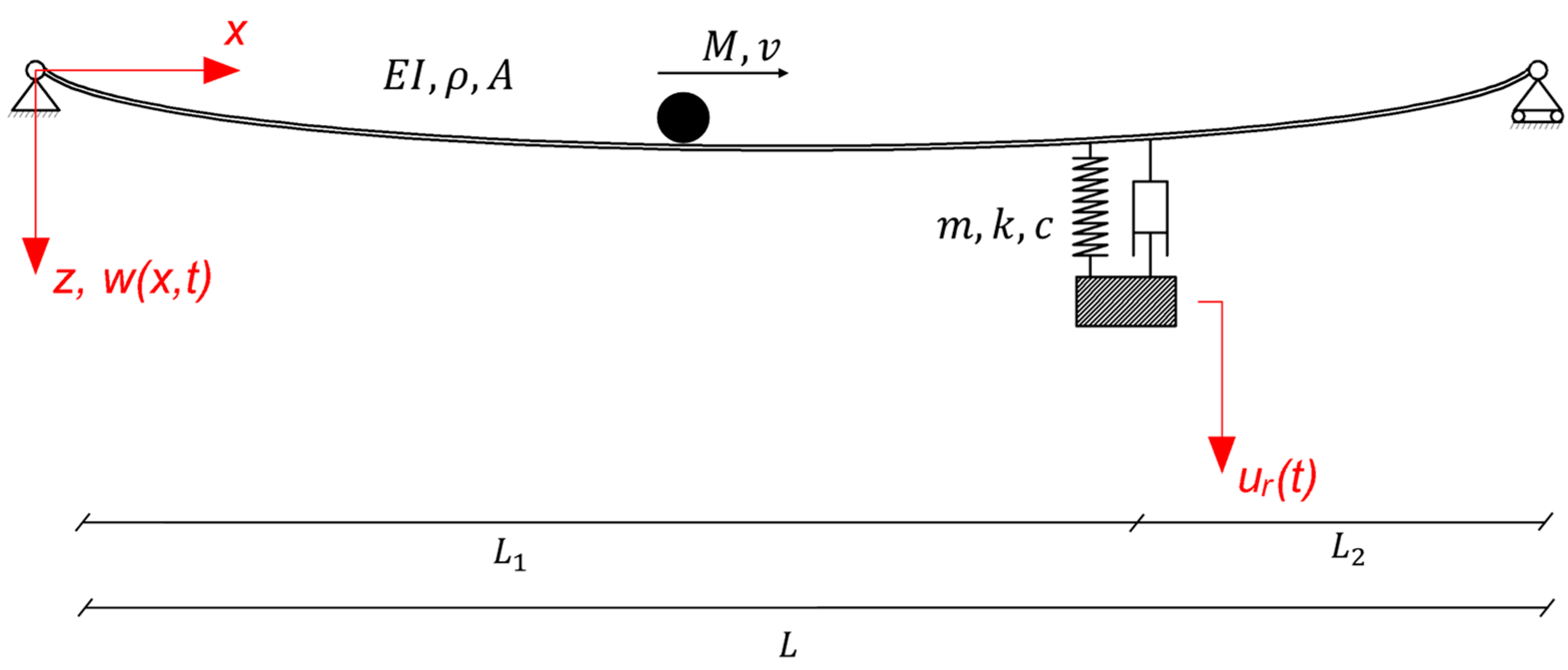
As shown in
Figure 1, a point mass
traverses a simply supported Bernoulli–Euler beam of length
with speed
, to which an SDOF system acting as a TMD is attached at location
As usual,
are the flexural rigidity, the cross-section area and the mass density of the beam, while
are the lumped mass, spring constant and damping coefficient of the attached TMD. Furthermore,
is the transverse displacement of the beam and
is the displacement of the mass of the TMD.
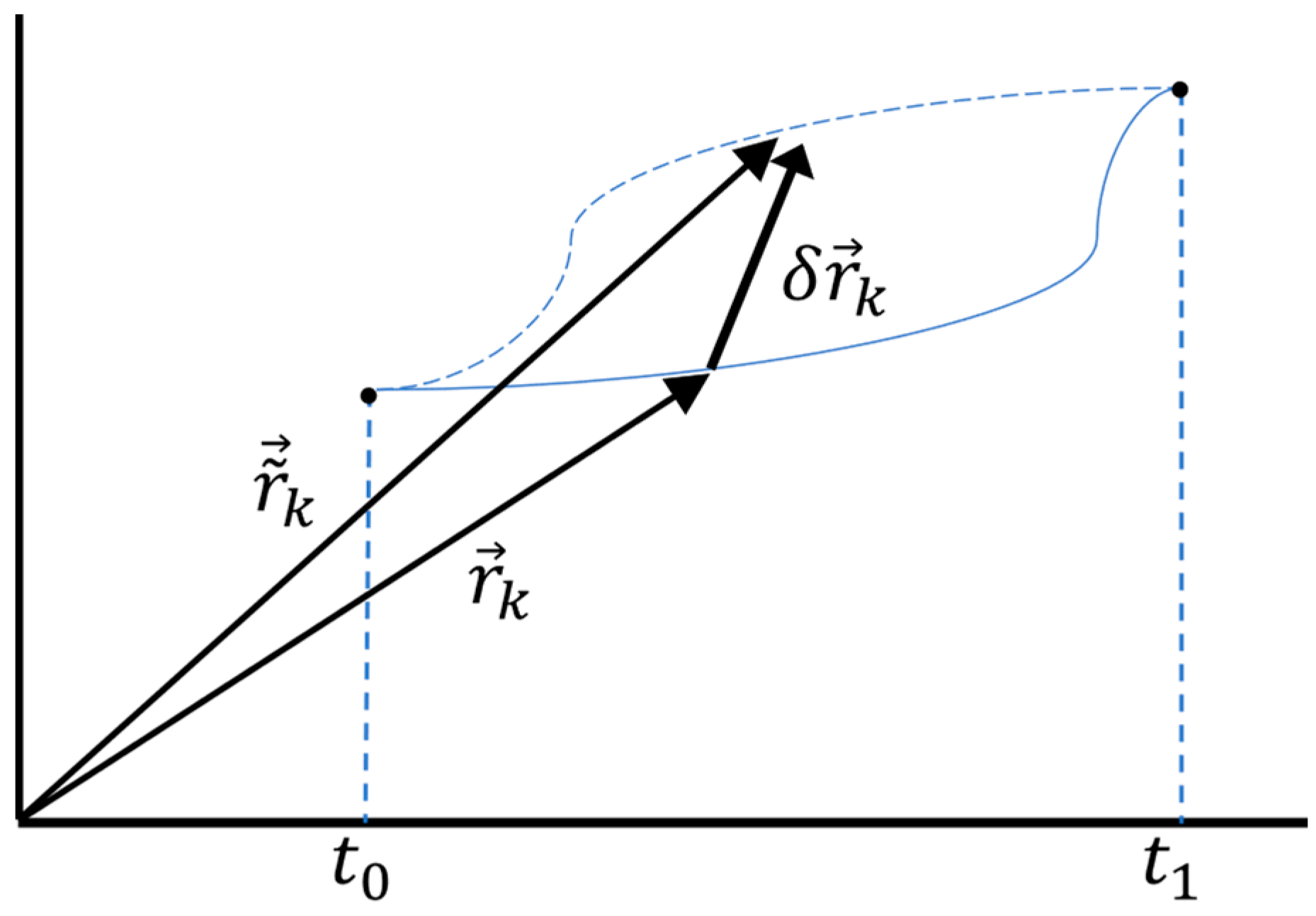
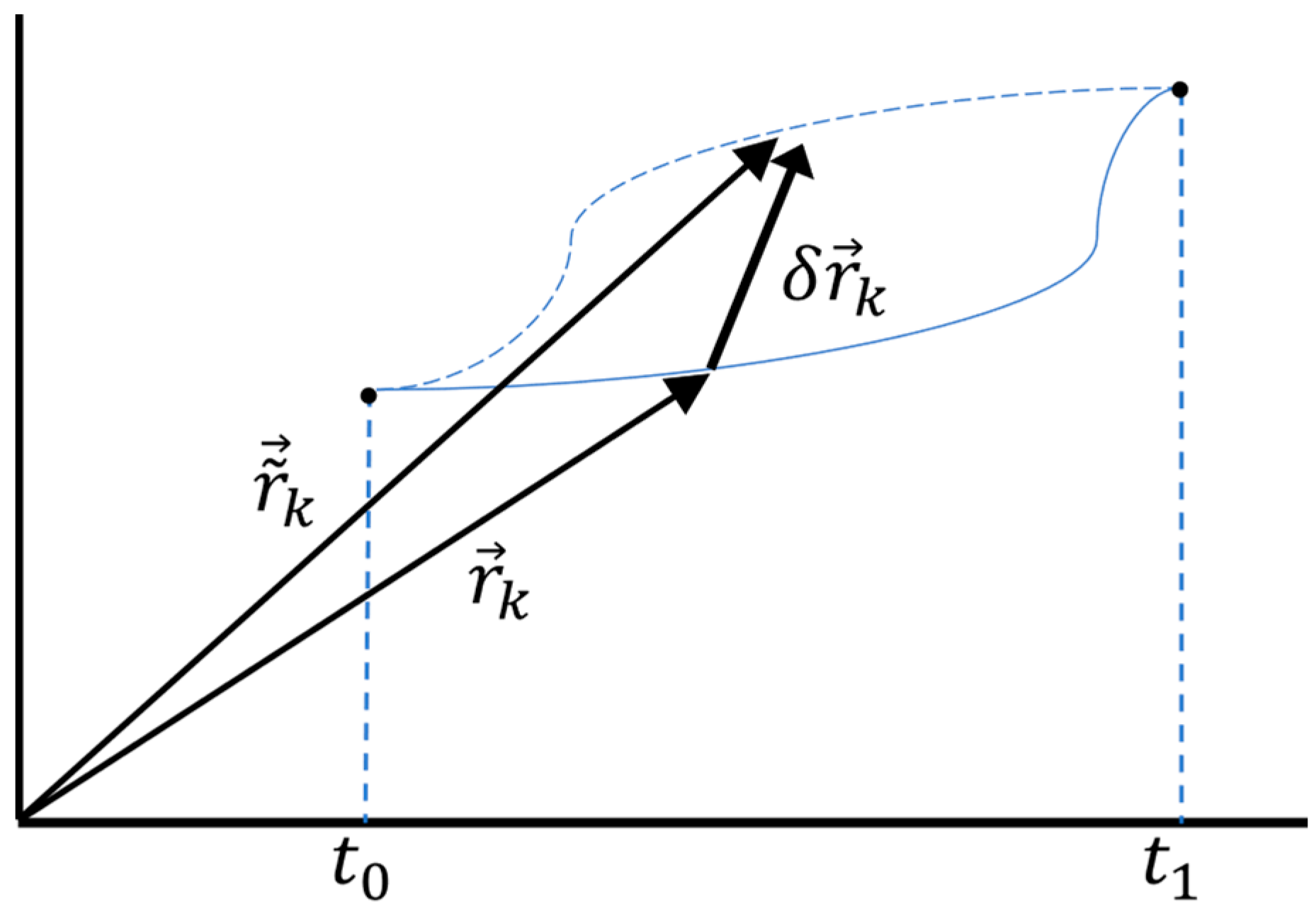
In order to identify the generalized coordinates of the coupled system, all displacements must be written with respect to the equilibrium position of both the beam and TMD; see
Figure 1. By using the first two generalized coordinates
, we have
, where
are the eigenfunctions. The following position vectors are defined for the beam, the TMD and the moving mass; see
Appendix A:
where
is the relative displacement of the TMD with respect to the beam’s elastic curve, while
is the roughness of the upper flange of the beam across which the point mass moves.
3.1. Potential Energy of the Coupled Structural System
The TMD is an SDOF system, and its potential energy about the static equilibrium position is simply
. Regarding the Bernoulli–Euler beam and considering flexural behavior, the potential energy is
where
is the generalized stiffness of the beam and primes (′) indicate spatial derivatives. Given the orthogonality of the eigenfunctions and the fact that the second spatial derivative of an eigenfunction is
, where
is the wave number, we have
, so that finally, the potential energy of the beam is simply
, with
being the eigenfrequencies.
3.2. Potential Energy of the Moving Mass
The potential energy of the point mass as it moves along the top surface of the beam depends on the initial () and final () transverse displacement as , with being the acceleration of gravity.
Adding all three components gives the total potential energy of the structural system as follows:
which depends on the kinematic vector
.
3.3. Kinetic Energy of the Coupled Structural System
The total time derivative of a material point with position vector
, is the velocity, i.e.,
where the overdot (.) indicates a time derivative. Taking into account the position vectors defined in Equation (1), the velocity of any point on the beam is
, that of the TMD is
and that of the moving mass is
. Note that in deriving the velocities, use was made of the partial derivative
. The kinetic energy of a mechanical system is given by the generic formula
, where
Therefore, summing the kinetic energy of the constituent parts gives the total kinetic energy as
In the above, the generalized mass is defined as , which is simply equal to (the Kronecker delta) when taking into account the orthogonality property of the eigenfunctions.
4. Equations of Motion of the Combined Structural System
By substituting the energy terms in Lagrange’s equation, see Equation (A4) in
Appendix A, and keeping in mind that the dependent variables of the problem are
, we recover the standard form of the equations of motion where the inertia, damping and restoring forces in the structural system balance the externally applied loads
as follows:
Note that the mass
, damping
and stiffness
matrices are all time-dependent, as is the forcing function
, and are listed below:
We know that the generalized masses, stiffnesses and dampers, respectively, are = , and , with being the eigenfrequencies of the beam in the absence of both TMD and moving mass, while are the damping coefficients associated with the first two eigenmodes. Obviously, it is quite simple to add to the above equation more TMD systems.
Free Vibrations
As the point mass moves across the span of the bridge, it is possible to define a critical velocity as
, past which the maximum transvers displacement will occur in the free vibration regime. For the simply supported beam,
, meaning that it coincides with the first eigenfrequency. However, if the moving mass is heavy as compared to the weight of the beam, the eigenvalue problem becomes time-dependent during the passage of the mass, which implies that all eigenfrequencies
are no longer constant but time-dependent. Thus, it becomes important to focus on the free vibrations of the combined beam-TMD structural system. Thus,
in the equation of motion, Equation (8), leaving the following terms:
The initial conditions are the vibrations imparted on the beam at the instant the moving load leaves the span of the beam.
5. Solution Strategy Using the Laplace Transform
Since the matrices in the equation of motion are time-dependent, we will employ the Laplace transform defined for a function of time
as follows [
23]:
Note that t
is the Laplace transform parameter and the inversion integral is defined over the complex plane. The solution strategy is to discretize the time axis as
and transform the matrix equation of motion, Equation (8), in the Laplace domain sequentially for every time step increment
. Once the problem has been solved, it is followed by the inverse Laplace transform based on Talbot’s algorithm [
24] for returning values back to the time domain. It is assumed that the time step
is small enough for the system matrices and external force in Equation (8) to remain constant over a time interval. Furthermore, the total time of interest for the beam’s motion is
. The result is a system of
matrix algebraic equations which are Laplace-transformed, which makes them parametric in the Laplace transform variable
:
We know that the vector of the unknown Laplace transformed kinematic variables is
, while the initial conditions for the generalized displacements and velocities are
and
, respectively, and are the final conditions from the immediately previous time interval
. Also, superscript
T stands for the transpose operator. Following the solution of Equation (11) for
, the inverse Laplace transformation is applied numerically (see
Appendix B) to recover the vector of the kinematic variables in the time domain as
. Finally, the procedure is repeated until the entire time axis has been swept. Note that all computations were carried out in the Python [
25] software environment.
8. Discussion and Conclusions
Tuned mass dampers were first introduced nearly one hundred years ago in structures and have since been shown to be efficient, reliable and cost-effective systems for vibration control. The design of TMDs in civil engineering addresses two basic categories of loads, namely wind-induced pressures and seismically induced ground motions. However, a large, tuned mass is often required in TMD design to adjust the combined structural system dynamic characteristics and to reach pre-set performance targets, a process that might lead to secondary transient effects in the structure. The use of TMDs and other, similar SDOF or MDOF devices in mechanical engineering serves an additional function that has to do with energy harvesting. Specifically, the kinetic energy absorbed by such secondary systems during pronounced vibrations of beams and other structural elements to which they are attached can theoretically be stored and used for commercial purposes. Often, these structural elements are excited by external forces of high magnitude such as wind pressure and as a result operate in the nonlinear range, exhibiting regions of instability.
The novelty in the present work, which focuses on vibration control in bridges, is the combination of an analytical solution plus its experimental verification regarding the flexural displacements induced in a bridge due to a heavy mass traveling across its span when a sub-optimal TMD is attached to a fixed location. The purpose of this simple TMD that comprises only a mass and a spring is to ameliorate the induced flexural vibrations with the aim of prolonging the service life of the bridge. Note that the only damping available in this suboptimal TMD is that provided by the spring element. Next, it is known that heavy traveling masses modify the dynamic properties of the bridge during the traverse time, thus resulting in a time-dependent eigenvalue problem. Furthermore, the dynamic response of the bridge for the case described above depends on the speed of traverse and on the mass ratio between the traveling mass and the bridge.
In closing, determining the response of a TMD with pre-set mechanical properties placed at fixed locations along the span is not a trivial problem to analyze, and the literature does not give guidelines in the case of continuous dynamic systems supporting heavy moving mass loads. Thus, the first step in this direction was to analyze the dynamic response of a simply supported bridge deck modeled as a continuous mass distribution system (i.e., a waveguide) with a TMD placed about the center of its span to counter the effects of a heavy traveling mass. Furthermore, it was essential to conduct experiments to verify that a simple, economical and easy to install TMD was capable of absorbing vibrations. This was successfully demonstrated by the numerical analysis results, which in turn were validated by the experimental measurements, all showing good agreement for the structural configuration presented herein. Finally, there are a few more considerations that must be addressed in the future such as (i) optimization studies on different TMD configurations, (ii) application to multiple categories of dynamic loads such as wind pressure and ground-induced motions, (iii) the use of multiple TMD configurations and (iv) the consideration of multiple span bridges.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}