
Gear Classification in Skating Cross-Country Skiing Using Inertial Sensors and Deep Learning

 ,
,  , , ,
, , ,  ,
,  ,
,  ,
,
Abstract
1. Introduction
2. Related Works
3. Materials and Methods
3.1. Materials
3.2. Experimental Setup
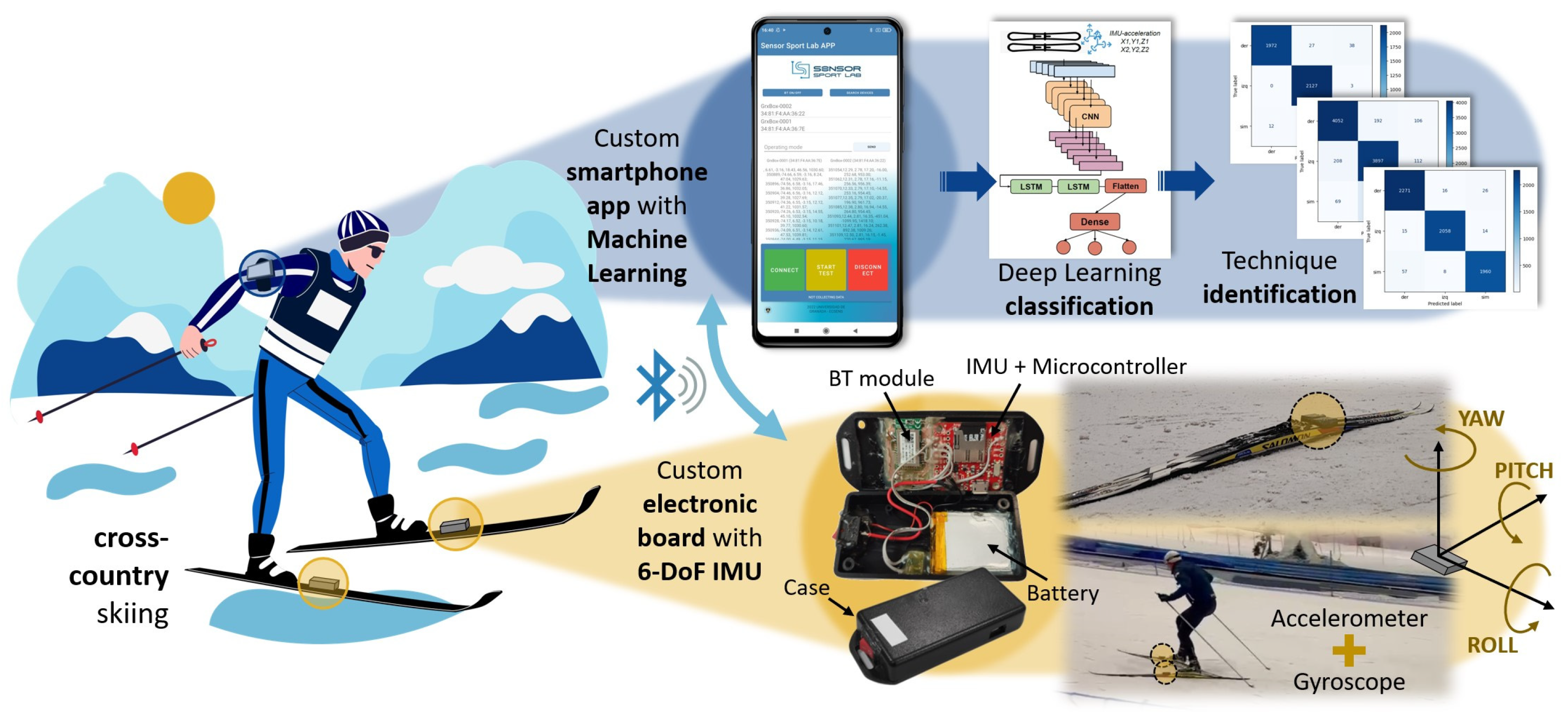
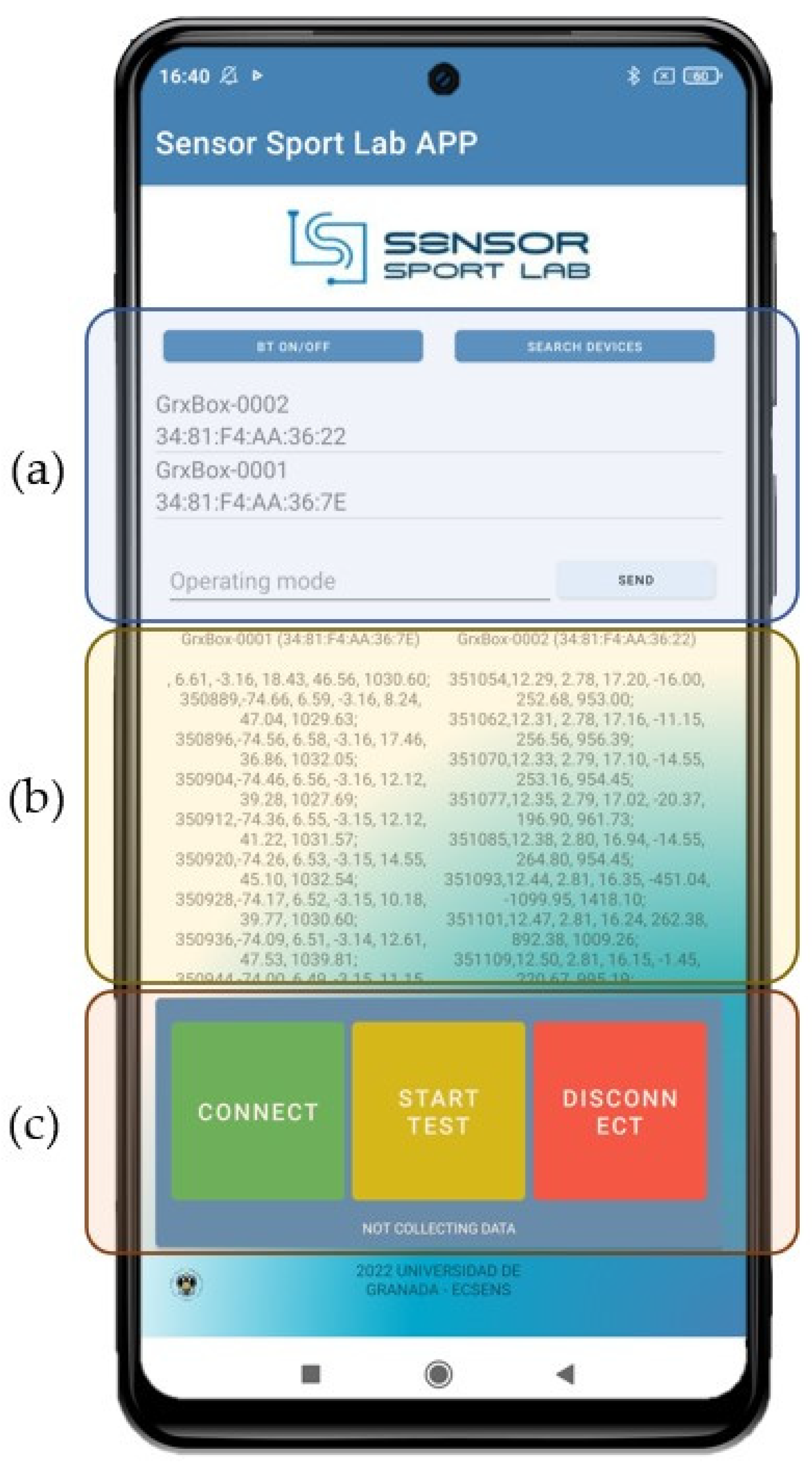
3.3. Smartphone Application
3.4. Deep Learning Classification Model
4. Results
Deep Learning Model Performance
- Intra-User Evaluation with Crossed Scenes: Each user’s data was split into two scenes, with one scene (comprising five ascents per gear) used for training and the other for evaluation. This process was reversed in a second iteration to ensure robustness in the evaluation. This method aimed to assess the model’s ability to learn and predict the ski gears for the same user under varying conditions. Table 2 and Table 3 present the precision, recall, F1 score, and support metrics for each class (G2R, G2L, and G3) for user 1 and user 2, respectively. Overall accuracy, macro-average, and weighted average values are also provided, demonstrating the model’s effective performance in classifying skating gears for individual users.
- Cross-user evaluation: The model was trained using data from user 1 and evaluated using data from user 2 and vice versa. This approach allowed us to assess the model’s generalizability between different users. Table 4 presents the precision, recall, F1 score, and support metrics for each class (G2R, G2L, and G3) in the cross-user evaluation.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Polo-Rodriguez, A.; Montoro-Lendinez, A.; Espinilla, M.; Medina-Quero, J. Classifying Sport-Related Human Activity from Thermal Vision Sensors Using CNN and LSTM. In Proceedings of the Image Analysis and Processing. ICIAP 2022 Workshops; Mazzeo, P.L., Frontoni, E., Sclaroff, S., Distante, C., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 38–48. [Google Scholar]
- Bernal Monroy, E.; Polo Rodríguez, A.; Espinilla Estevez, M.; Medina Quero, J. Fuzzy Monitoring of In-Bed Postural Changes for the Prevention of Pressure Ulcers Using Inertial Sensors Attached to Clothing. J. Biomed. Inform. 2020, 107, 103476. [Google Scholar] [CrossRef] [PubMed]
- Polo-Rodriguez, A.; Diaz-Jimenez, D.; Carvajal, M.A.; Baños, O.; Medina-Quero, J. Detection of Sets and Repetitions in Strength Exercises Using IMU-Based Wristband Wearables. In Proceedings of the Proceedings of the 15th International Conference on Ubiquitous Computing & Ambient Intelligence (UCAmI 2023); Bravo, J., Urzáiz, G., Eds.; Springer Nature Switzerland: Cham, Switzerland, 2023; pp. 71–80. [Google Scholar]
- Ruiz-García, I.; Navarro-Marchal, I.; Ocaña-Wilhelmi, J.; Palma, A.J.; Gómez-López, P.J.; Carvajal, M.A. Development and Evaluation of a Low-Drift Inertial Sensor-Based System for Analysis of Alpine Skiing Performance. Sensors 2021, 21, 2480. [Google Scholar] [CrossRef] [PubMed]
- Amendolara, A.; Pfister, D.; Settelmayer, M.; Shah, M.; Wu, V.; Donnelly, S.; Johnston, B.; Peterson, R.; Sant, D.; Kriak, J.; et al. An Overview of Machine Learning Applications in Sports Injury Prediction. Cureus 2023, 15, e46170. [Google Scholar] [CrossRef]
- Van Eetvelde, H.; Mendonça, L.D.; Ley, C.; Seil, R.; Tischer, T. Machine Learning Methods in Sport Injury Prediction and Prevention: A Systematic Review. J. Exp. Orthop. 2021, 8, 27. [Google Scholar] [CrossRef]
- Li, X.; Song, L.; Wu, H. Digitalization of Cross-Country Skiing Training Based on Multisensor Combination. J. Sens. 2021, 2021, 5662716. [Google Scholar] [CrossRef]
- Takeda, M.; Miyamoto, N.; Endo, T.; Ohtonen, O.; Lindinger, S.; Linnamo, V.; Stöggl, T. Cross-Country Skiing Analysis and Ski Technique Detection by High-Precision Kinematic Global Navigation Satellite System. Sensors 2019, 19, 4947. [Google Scholar] [CrossRef]
- Marsland, F.; Mackintosh, C.; Holmberg, H.-C.; Anson, J.; Waddington, G.; Lyons, K.; Chapman, D. Full Course Macro-Kinematic Analysis of a 10 Km Classical Cross-Country Skiing Competition. PLoS ONE 2017, 12, e0182262. [Google Scholar] [CrossRef]
- Seeberg, T.M.; Tjønnås, J.; Rindal, O.M.H.; Haugnes, P.; Dalgard, S.; Sandbakk, Ø. A Multi-Sensor System for Automatic Analysis of Classical Cross-Country Skiing Techniques. Sports Eng. 2017, 20, 313–327. [Google Scholar] [CrossRef]
- Johansson, M.; Korneliusson, M.; Lawrence, N.L. Identifying Cross Country Skiing Techniques Using Power Meters in Ski Poles. In Proceedings of the Nordic Artificial Intelligence Research and Development; Bach, K., Ruocco, M., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 52–57. [Google Scholar]
- Nilsson, J.; Tveit, P.; Eikrehagen, O. Effects of Speed on Temporal Patterns in Classical Style and Freestyle Cross-Country Skiing. Sports Biomech. 2004, 3, 85–107. [Google Scholar] [CrossRef]
- Andersson, E.; Supej, M.; Sandbakk, Ø.; Sperlich, B.; Stöggl, T.; Holmberg, H.-C. Analysis of Sprint Cross-Country Skiing Using a Differential Global Navigation Satellite System. Eur. J. Appl. Physiol. 2010, 110, 585–595. [Google Scholar] [CrossRef]
- Torvik, P.-Ø.; von Heimburg, E.D.; Sende, T.; Welde, B. The Effect of Pole Length on Physiological and Perceptual Responses during G3 Roller Ski Skating on Uphill Terrain. PLoS ONE 2019, 14, e0211550. [Google Scholar] [CrossRef] [PubMed]
- Stöggl, T.; Holst, A.; Jonasson, A.; Andersson, E.; Wunsch, T.; Norström, C.; Holmberg, H.-C. Automatic Classification of the Sub-Techniques (Gears) Used in Cross-Country Ski Skating Employing a Mobile Phone. Sensors 2014, 14, 20589–20601. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; He, M.; Hou, M.; Ma, Y. Deep Learning Based Ground Reaction Force Estimation for Stair Walking Using Kinematic Data. Measurement 2022, 198, 111344. [Google Scholar] [CrossRef]
- Fan, J.; Bi, S.; Xu, R.; Wang, L.; Zhang, L. Hybrid Lightweight Deep-Learning Model for Sensor-Fusion Basketball Shooting-Posture Recognition. Measurement 2022, 189, 110595. [Google Scholar] [CrossRef]
- Rassem, A.; El-Beltagy, M.; Saleh, M. Cross-Country Skiing Gears Classification Using Deep Learning. arXiv 2017. [Google Scholar] [CrossRef]
- Rindal, O.M.H.; Seeberg, T.M.; Tjønnås, J.; Haugnes, P.; Sandbakk, Ø. Automatic Classification of Sub-Techniques in Classical Cross-Country Skiing Using a Machine Learning Algorithm on Micro-Sensor Data. Sensors 2018, 18, 75. [Google Scholar] [CrossRef] [PubMed]
- Gløersen, Ø.; Gilgien, M. Classification of Cross-Country Ski Skating Sub-Technique Can Be Automated Using Carrier-Phase Differential GNSS Measurements of the Head’s Position. Sensors 2021, 21, 2705. [Google Scholar] [CrossRef]
- Crema, C.; Depari, A.; Flammini, A.; Sisinni, E.; Haslwanter, T.; Salzmann, S. Characterization of a Wearable System for Automatic Supervision of Fitness Exercises. Measurement 2019, 147, 106810. [Google Scholar] [CrossRef]
- Horvat, T.; Job, J. The Use of Machine Learning in Sport Outcome Prediction: A Review. WIREs Data Min. Knowl. Discov. 2020, 10, e1380. [Google Scholar] [CrossRef]
- Jang, J.; Ankit, A.; Kim, J.; Jang, Y.J.; Kim, H.Y.; Kim, J.H.; Xiong, S. A Unified Deep-Learning Model for Classifying the Cross-Country Skiing Techniques Using Wearable Gyroscope Sensors. Sensors 2018, 18, 3819. [Google Scholar] [CrossRef]
- Sakurai, Y.; Fujita, Z.; Ishige, Y. Automatic Identification of Subtechniques in Skating-Style Roller Skiing Using Inertial Sensors. Sensors 2016, 16, 473. [Google Scholar] [CrossRef] [PubMed]
- Sui, J.-D.; Chen, W.-H.; Shiang, T.-Y.; Chang, T.-S. Real-Time Wearable Gait Phase Segmentation for Running And Walking. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–14 October 2020; pp. 1–5. [Google Scholar]
- Koşar, E.; Barshan, B. A New CNN-LSTM Architecture for Activity Recognition Employing Wearable Motion Sensor Data: Enabling Diverse Feature Extraction. Eng. Appl. Artif. Intell. 2023, 124, 106529. [Google Scholar] [CrossRef]
- Ordóñez, F.J.; Roggen, D. Deep Convolutional and LSTM Recurrent Neural Networks for Multimodal Wearable Activity Recognition. Sensors 2016, 16, 115. [Google Scholar] [CrossRef] [PubMed]
- Xia, K.; Huang, J.; Wang, H. LSTM-CNN Architecture for Human Activity Recognition. IEEE Access 2020, 8, 56855–56866. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operation Mode | Consumption (mAh) | Battery Life (h) |
|---|---|---|
| Not connected | 25.60 | 17.60 |
| Connected | 30.10 | 14.95 |
| Transmitting data | 39.30 | 11.45 |
| Sleep mode | 0.35 | 1285.70 (53.57 days) |
| Class | Precision | Recall | F1 Score | Support |
|---|---|---|---|---|
| G2R | 0.99 | 0.97 | 0.98 | 2037 |
| G2L | 0.98 | 1.00 | 0.99 | 2130 |
| G3 | 0.98 | 0.99 | 0.98 | 1798 |
| Accuracy | 0.98 | |||
| Macro avg | 0.98 | |||
| Weighted avg | 0.98 | |||
| Class | Precision | Recall | F1 Score | Support |
|---|---|---|---|---|
| G2R | 0.97 | 0.98 | 0.98 | 2313 |
| G2L | 0.99 | 0.99 | 0.99 | 2087 |
| G3 | 0.98 | 0.97 | 0.97 | 2025 |
| Accuracy | 0.98 | |||
| Macro avg | 0.98 | |||
| Weighted avg | 0.98 | |||
| Class | Precision | Recall | F1 Score | Support |
|---|---|---|---|---|
| G2R | 0.94 | 0.93 | 0.93 | 4350 |
| G2L | 0.84 | 0.92 | 0.88 | 4217 |
| G3 | 0.94 | 0.84 | 0.88 | 3823 |
| Accuracy | 0.90 | |||
| Macro avg | 0.90 | |||
| Weighted avg | 0.90 | |||
| Stöggl et al. [15] | Johansson et al. [11] | Jang et al. [23] | Sakurai et al. [24] | Our System | |
|---|---|---|---|---|---|
| Number of gears | 5 | 3 | 4 | 6 | 3 |
| Sensor system used | IMU and smartphone GPS | Power meters: Force sensors and IMU | Gyro | 6-DoF IMUs | 3D accelerometer |
| Number of sensors | 1 + 1 | 2 + 2 | 17 | 4 | 2 |
| Data processing | Markov chain of multivariate Gaussian distributions | CNN, BLSTM, and LSTM architecture | CNN-LSTM architecture | Decision tree | CNN and LSTM architecture |
| Accuracy | 90% | 95% | 90% | - | 98% |
| Cross-user accuracy | - | 78% | - | 95% | 90% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pousibet-Garrido, A.; Polo-Rodríguez, A.; Moreno-Pérez, J.A.; Ruiz-García, I.; Escobedo, P.; López-Ruiz, N.; Marcen-Cinca, N.; Medina-Quero, J.; Carvajal, M.Á. Gear Classification in Skating Cross-Country Skiing Using Inertial Sensors and Deep Learning. Sensors 2024, 24, 6422. https://doi.org/10.3390/s24196422
Pousibet-Garrido A, Polo-Rodríguez A, Moreno-Pérez JA, Ruiz-García I, Escobedo P, López-Ruiz N, Marcen-Cinca N, Medina-Quero J, Carvajal MÁ. Gear Classification in Skating Cross-Country Skiing Using Inertial Sensors and Deep Learning. Sensors. 2024; 24(19):6422. https://doi.org/10.3390/s24196422
Chicago/Turabian StylePousibet-Garrido, Antonio, Aurora Polo-Rodríguez, Juan Antonio Moreno-Pérez, Isidoro Ruiz-García, Pablo Escobedo, Nuria López-Ruiz, Noel Marcen-Cinca, Javier Medina-Quero, and Miguel Ángel Carvajal. 2024. "Gear Classification in Skating Cross-Country Skiing Using Inertial Sensors and Deep Learning" Sensors 24, no. 19: 6422. https://doi.org/10.3390/s24196422
APA StylePousibet-Garrido, A., Polo-Rodríguez, A., Moreno-Pérez, J. A., Ruiz-García, I., Escobedo, P., López-Ruiz, N., Marcen-Cinca, N., Medina-Quero, J., & Carvajal, M. Á. (2024). Gear Classification in Skating Cross-Country Skiing Using Inertial Sensors and Deep Learning. Sensors, 24(19), 6422. https://doi.org/10.3390/s24196422