
Design and Validation of Single-Axis 3D-Printed Force Sensor Based on Three Nested Flexible Rings

Abstract
1. Introduction
2. Structural Design and Sensing Scheme
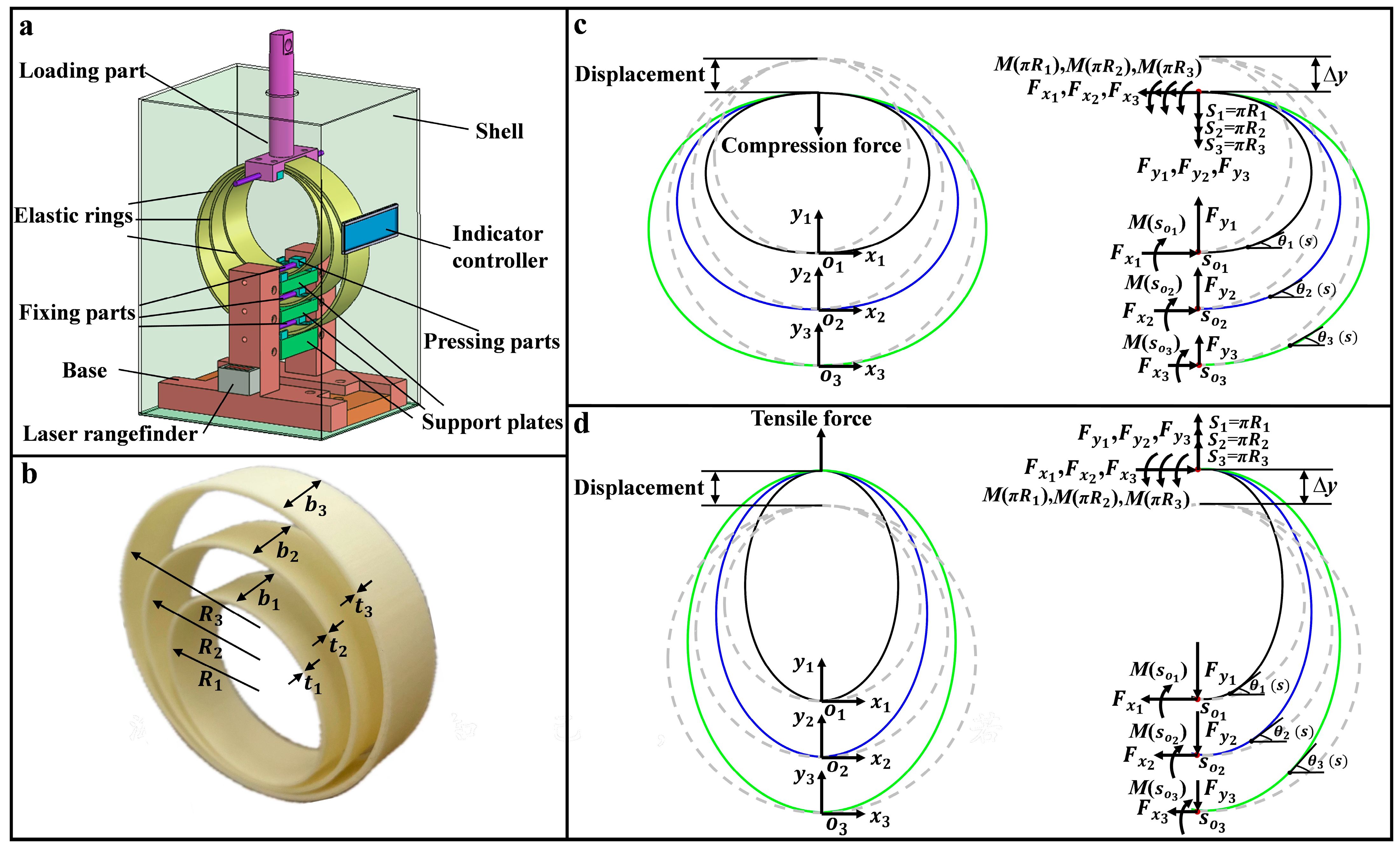
2.1. Structural Design
2.2. Analytical Model
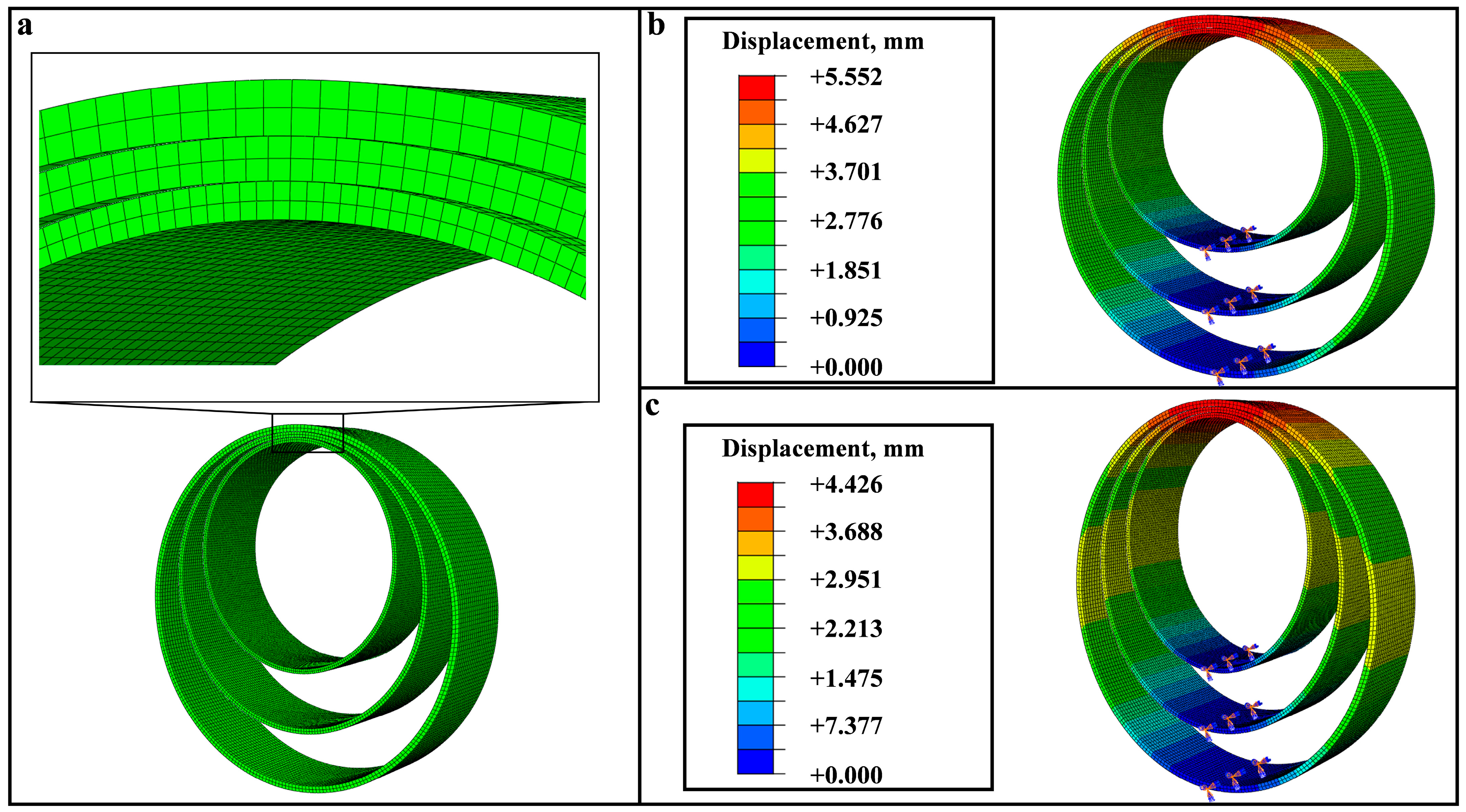
3. FEM Simulation
4. Experimental Setup and Testing Results
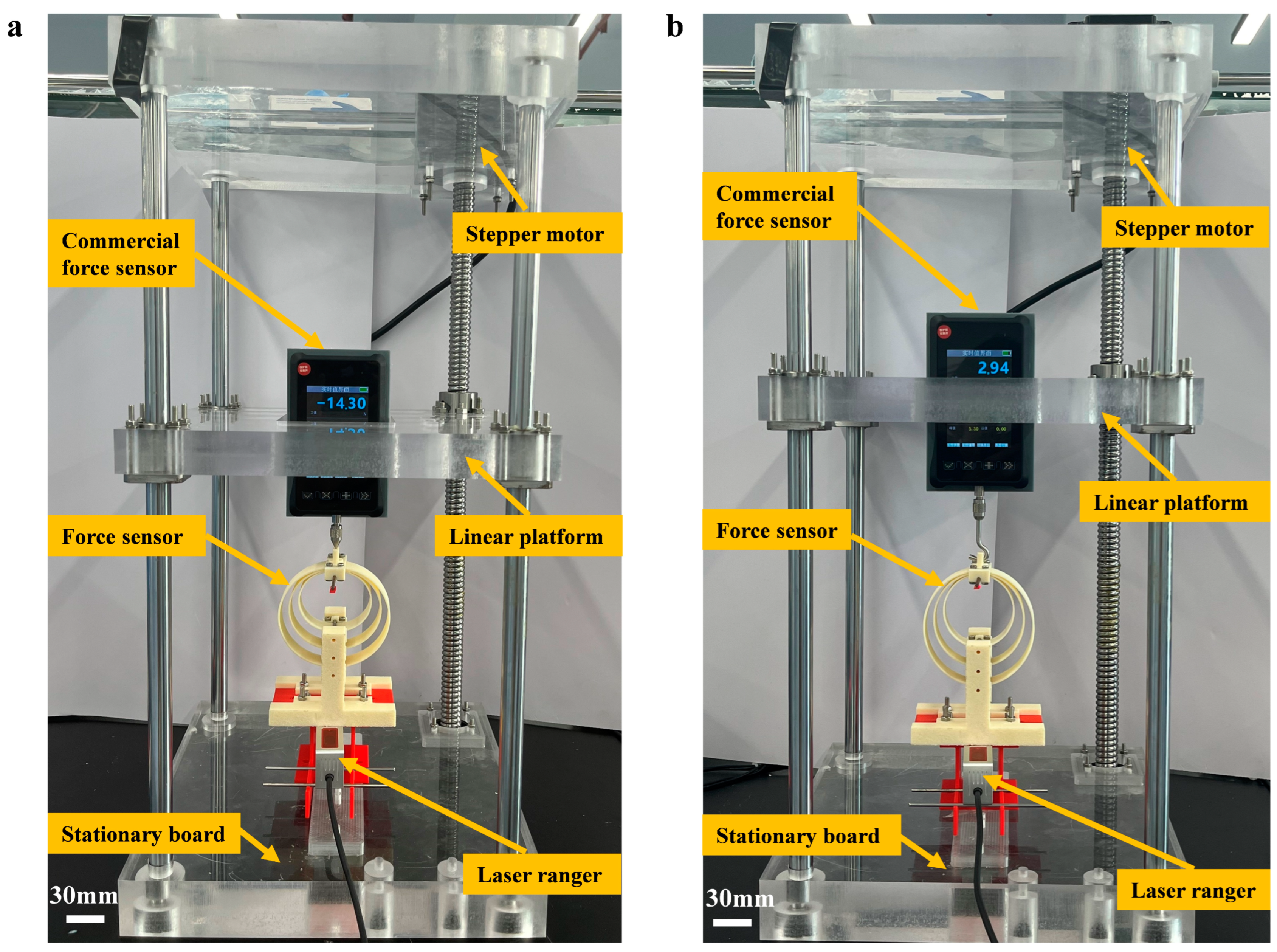
4.1. Experimental Setup
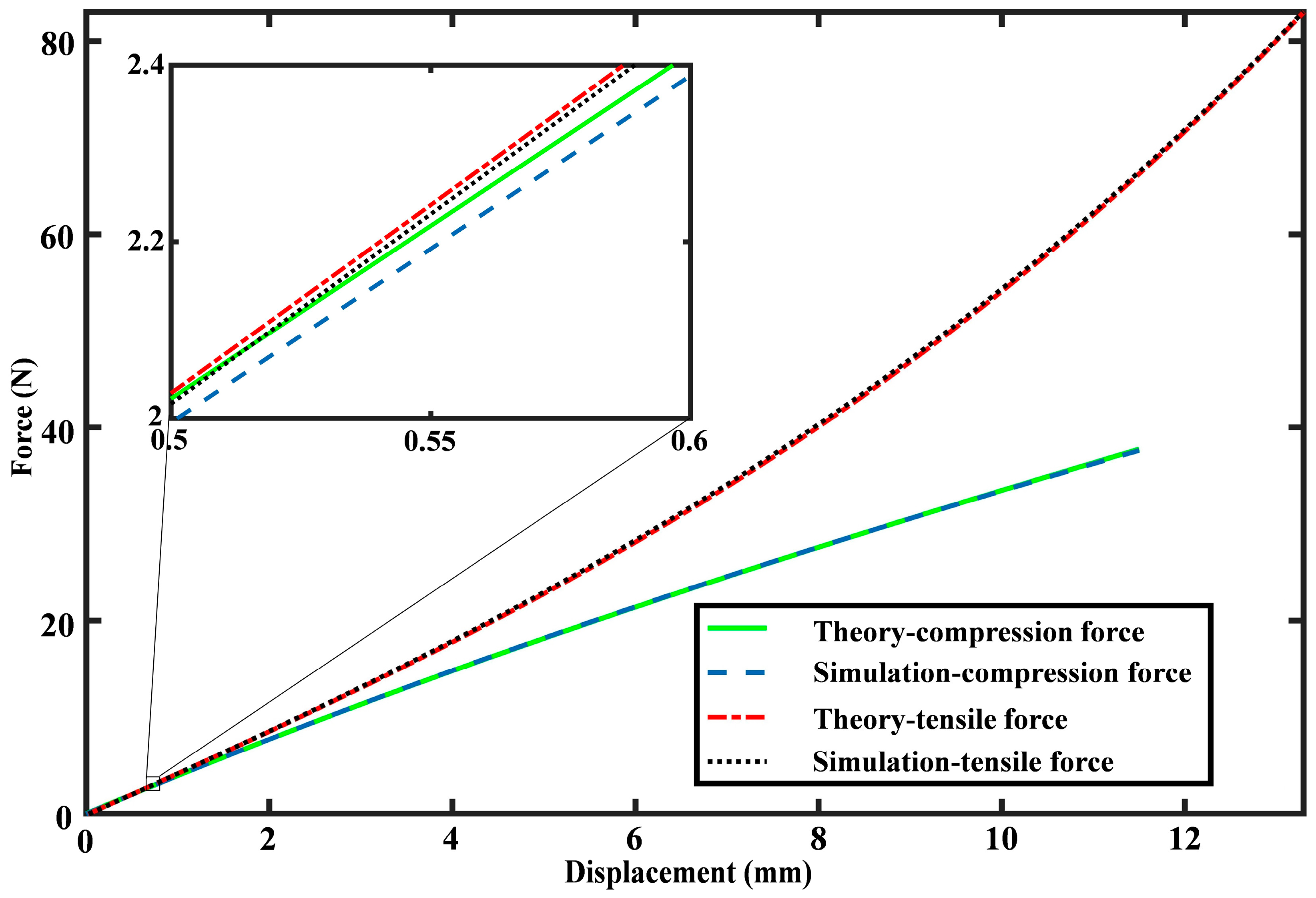
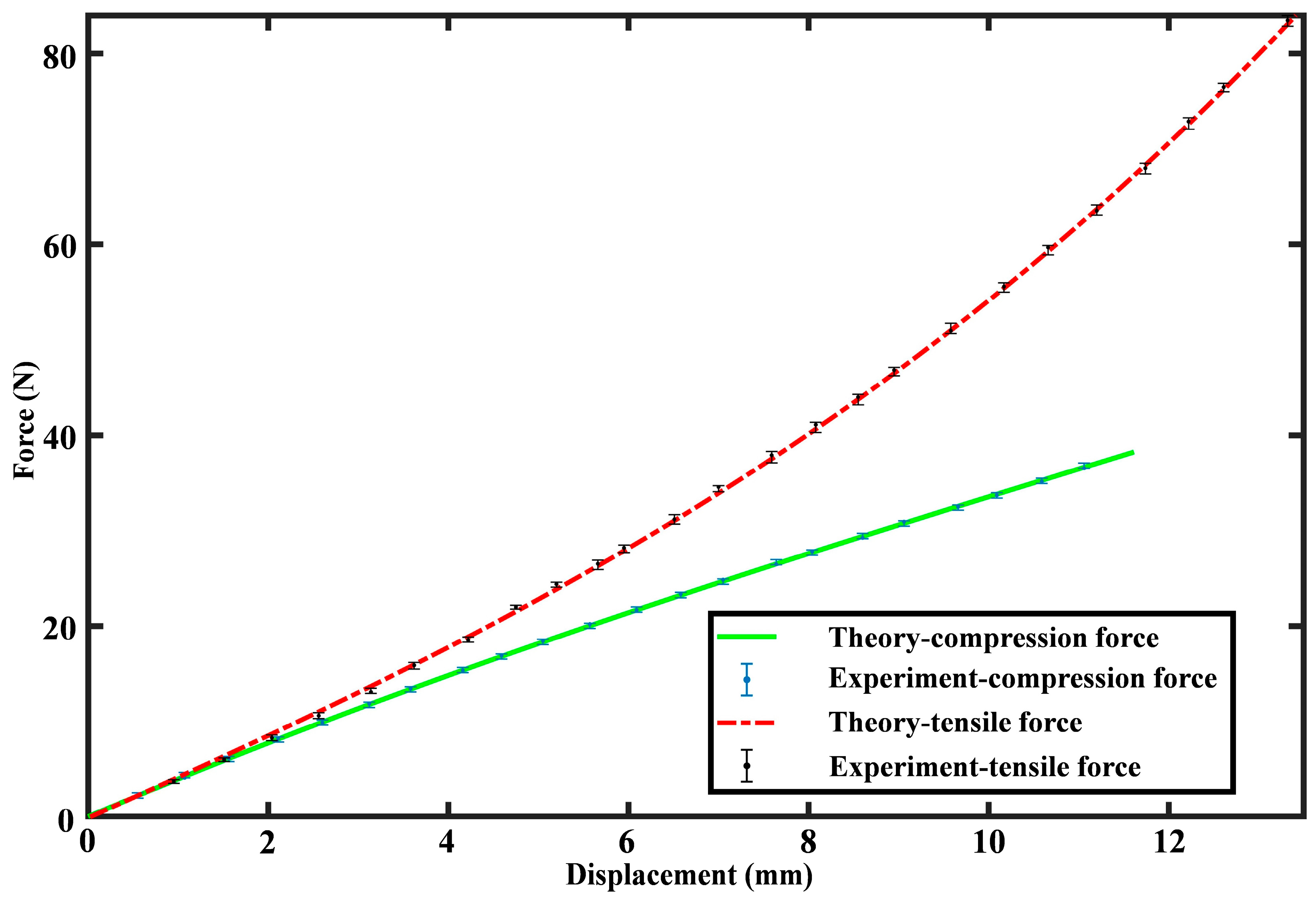
4.2. Force-Displacement Characteristic Experiment
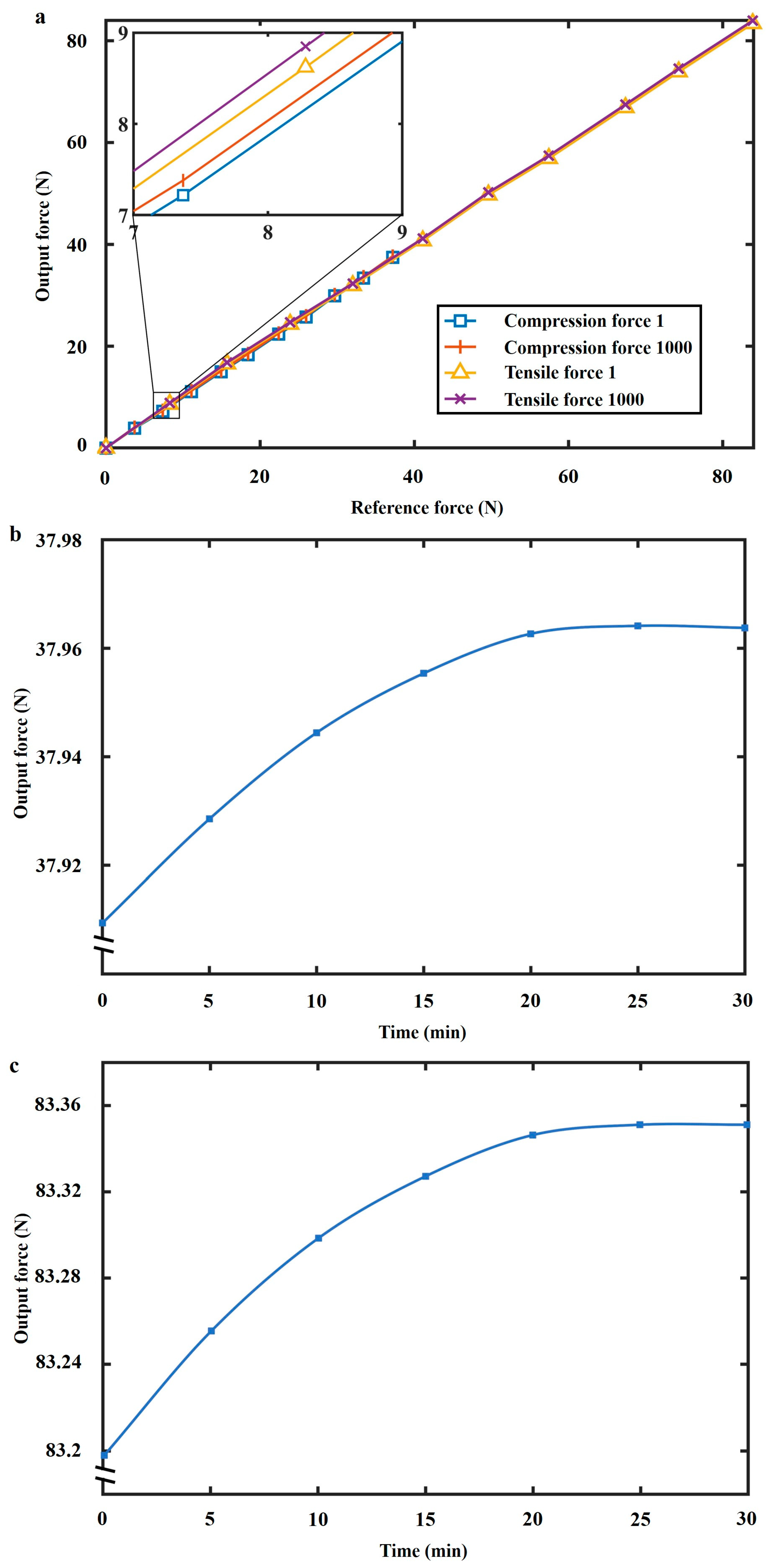
4.3. Performance Test
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, P.F.; Chen, Y.; Chen, Y.L.; Dang, F. Gyro-Free inertial measurement unit with unfettered accelerometer array distribution and for the object with position change in center of gravity. IEEE Sens. J. 2021, 21, 9423–9435. [Google Scholar] [CrossRef]
- He, Y.; Wu, J.X.; Lin, M.X.; Xiao, S.; Liu, H.; Zhou, P. Ionic flexible force sensors and their potential applications. J. Mater. Chem. C 2021, 9, 16378–16390. [Google Scholar] [CrossRef]
- Chuang, C.H.; Lee, D.H.; Chang, W.J.; Weng, W.C.; Shaikh, M.O.; Huang, C.L. Real-Time monitoring via patch-type piezoelectric force sensors for internet of things based logistic. IEEE Sens. J. 2017, 17, 2498–2506. [Google Scholar] [CrossRef]
- Li, B.; Gil, B.; Power, M.; Gao, A.Z.; Treratanakulchai, S.; Anastasova, S.; Yang, G.Z. Carbon-Nanotube-Coated 3d microspring force sensor for medical applications. ACS Appl. Mater. Interfaces 2019, 11, 35577–35586. [Google Scholar] [CrossRef]
- Yang, P.F.; Xin, S.W.; Dang, F. A single-axis force sensor based on a 3d-printed elastic ring. Measurement 2024, 236, 115140. [Google Scholar] [CrossRef]
- Fu, L.Y.; Song, A.G. Model-Based load characteristics analysis of the multi-dimensional force sensor. IEEE Access 2020, 8, 116431–116440. [Google Scholar] [CrossRef]
- Diethold, C.; Kühnel, M.; Hilbrunner, F.; Froehlich, T.; Manske, E. Determination of force to displacement curves using a nanopositioning system based on electromagnetic force compensated balances. Measurement 2014, 21, 343–348. [Google Scholar] [CrossRef]
- Li, H.F.; Liu, C.S. Design and experimental validation of novel force sensor. IEEE Sens. J. 2015, 15, 4402–4408. [Google Scholar] [CrossRef]
- Zhu, Y.L.; Chen, X.; Chu, K.M.; Wang, X.; Hu, Z.Q.; Su, H.J. Carbon back/PDMS based flexible capacitive tactile sensor for multi-directional force sensing. Sensors 2022, 22, 628. [Google Scholar] [CrossRef]
- Hidalgo, J.A.; Oballe-Peinado, O.; Castellanos-Ramos, J.; Tejero-Calado, J.C.; Vidal-Verdu, F. Wide range calibration method for direct interface circuits and application to resistive force sensors. IEEE Sens. J. 2021, 21, 22956–22966. [Google Scholar] [CrossRef]
- Gavrilenkov, S.I.; Gavriushin, S.S.; Godzikovsky, V.A. Multicriteria approach to design of strain gauge force transducers. J. Phys. Conf. Ser. 2019, 1379, 012010. [Google Scholar] [CrossRef]
- Tamura, R.; Horikoshi, T.; Sakaino, S.; Tsuji, T. High dynamic range 6-axis force sensor employing a semiconductor-metallic foil strain gauge combination. IEEE Robot. Autom. Lett. 2021, 6, 6243–6249. [Google Scholar] [CrossRef]
- Sun, Y.J.; Liu, Y.W.; Zou, T.; Jin, M.H.; Liu, H. Development and evaluation of a sensor glove for hand function assessment and preliminary attempts at assessing hand coordination. Measurement 2015, 65, 135–148. [Google Scholar] [CrossRef]
- Mirfakhrai, T.; Oh, J.; Kozlov, M.E.; Fang, S.L.; Zhang, M.; Baughman, R.H.; Madden, D.W. Mechanoelectrical force sensors using twisted yarns of carbon nanotubes. IEEE/ASME Trans. Mechatron. 2011, 16, 90–97. [Google Scholar] [CrossRef]
- Gao, S.; Guo, R.; Xu, L.J. A touch orientation classification-based force–voltage responsivity stabilization method for piezoelectric force sensing in interactive displays. IEEE Sens. J. 2020, 20, 8147–8154. [Google Scholar] [CrossRef]
- Meng, H.L.; Zhu, W.H.; Zhou, L.X.; Qian, X.; Bao, G.J. A 3D force sensor based on combination of magnetic and piezoresistive transduction. IEEE Sens. J. 2022, 22, 3595–3604. [Google Scholar] [CrossRef]
- Adelsberg, N.; Weber, Y.; Yoffe, A.; Shilo, D. Wireless thin layer force sensor based on a magnetostrictive composite material. Smart Mater. Struct. 2017, 26, 065013. [Google Scholar] [CrossRef]
- Noh, Y.; Liu, H.B.; Sareh, S.; Chathuranga, D.S.; Wurdemann, H.; Rhode, K.; Althoefer, K. Image-Based optical miniaturized three-axis force sensor for cardiac catheterization. IEEE Sens. J. 2016, 16, 7924–7932. [Google Scholar] [CrossRef]
- Zhang, Z.J.; Chen, Y.P.; Zhang, D.L. Development and application of a tandem force sensor. Sensors 2020, 20, 6042. [Google Scholar] [CrossRef]
- Saxena, R.; Ghoshal, S.K.; Kumar, H. Design investigations of axis-symmetrical force transducers. MAPAN J. Metrol. Soc. India 2019, 34, 511–519. [Google Scholar] [CrossRef]
- Majcherek, S.; Aman, A.; Fochtmann, J. A MEMS sensor for microscale force measurements. J. Micromech. Microeng. 2016, 26, 025013. [Google Scholar] [CrossRef]
- Kebede, G.A.; Ahmad, A.R.; Lee, S.C.; Lin, C.Y. Decoupled six-axis force-moment sensor with a novel strain gauge arrangement and error reduction techniques. Sensors 2019, 19, 3012. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.Y.; Ahmad, A.R.; Kebede, G.A. Novel mechanically fully decoupled six-axis force-moment sensor. Sensors 2020, 20, 395. [Google Scholar] [CrossRef]
- Kang, M.K.; Lee, S.; Kim, J.H. Shape optimization of a mechanically decoupled six-axis force/torque sensor. Sens. Actuators A Phys. 2014, 209, 41–51. [Google Scholar] [CrossRef]
- Kusumi, K.; Nakamoto, H.; Kobayashi, F.; Nagahata, Y. Development of magnetic food texture sensor with spring and sliding mechanism. In Proceedings of the IEEE SENSORS Conference, Rotterdam, The Netherlands, 25–28 October 2020. [Google Scholar]
- AI-Dahiree, O.S.; Tokhi, M.O.; Hadi, N.H.; Hmoad, N.R.; Yap, H.J.; Albaadani, E.A. Design and shape optimization of strain gauge load cell for axial force measurement for test benches. Sensors 2022, 22, 7508. [Google Scholar] [CrossRef]
- Blakeborough, A.; Clément, D.; Williams, M.S.; Woodward, N. Novel load cell for measuring axial force, shear force, and bending movement in large-scale structural experiments. Exp. Mech. 2002, 42, 115–122. [Google Scholar] [CrossRef]
- Nie, Q.D.; Sup, F.C. A soft four degree-of-freedom load cell based on the hall effect. IEEE Sens. J. 2017, 21, 7355–7363. [Google Scholar] [CrossRef]
- Kim, U.; Lee, D.H.; Kim, Y.B.; Seok, D.Y.; Choi, H.R. A novel six-axis force/torque sensor for robotic applications. IEEE/ASME Trans. Mechatron. 2017, 22, 1381–1391. [Google Scholar] [CrossRef]
- Nie, Y.J.; Wu, L.C.; Ke, J.D.; Lu, T.F. Planar six-axis force and torque sensors. IEEE Sens. J. 2021, 21, 26631–26641. [Google Scholar]
- Asghar, A.; Fallah, A.S.; Seneviratne, L.D.; Dasgupta, P.; Althoefer, K. Novel force sensing approach employing prismatic-tip optical fiber inside an orthoplanar spring structure. IEEE/ASME Trans. Mechatron. 2014, 19, 121–130. [Google Scholar]
- Qu, J.T.; Wu, Q.Y.; Clancy, T.; Fan, Q.G.; Wang, X.; Liu, X.Y. 3D-Printed strain-gauge micro force sensors. IEEE Sens. J. 2020, 20, 6971–6978. [Google Scholar] [CrossRef]
- Tang, Z.X.; Wang, S.X.; Shi, C.Y. Development of a hybrid force-displacement sensor based on fiber bragg grating for radial artery pulse waveform measurement. IEEE Sens. J. 2021, 21, 20045–20054. [Google Scholar] [CrossRef]
- Liu, M.J.; Zhang, Q.; Shao, Y.W.; Liu, C.Q.; Zhao, Y.L. Research of a novel 3D printed strain gauge type force sensor. Micromachines 2019, 10, 20. [Google Scholar] [CrossRef] [PubMed]
- Pieniazek, J.; Ciecinski, P. Temperature and nonlinearity compensation of pressure sensor with common sensors response. IEEE Trans. Instrum. Meas. 2020, 69, 1284–1293. [Google Scholar] [CrossRef]
- Yang, P.F.; Dang, F.; Liao, X.B.; Chen, X. Buckling morphology of an elastic ring confined in an annular channel. Soft Matter 2019, 15, 5443–5448. [Google Scholar] [CrossRef]
- Yang, P.F.; Huang, R.X.; Dang, F.; Shan, B.X.; Wang, D.W.; Liu, H.; Li, Y.; Liao, X.B. Motorizing the buckled blister for rotary actuation. Exploration 2024, 20230055. [Google Scholar] [CrossRef]
- Yang, P.F.; Wang, D.W.; Liu, H.; Huang, R.X.; Li, X.F.; Xin, S.W.; Huang, F.; Dang, F. Spontaneous buckling morphology transition of an elastic ring confined in an annular region constraint. Eur. J. Mech.—A/Solids 2023, 100, 105026. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Force | Hysteresis Error | Straightness Error | Repeatability Error | Temperature Error | Cyclic Error | Creep Error |
|---|---|---|---|---|---|---|
| Compression Force | 0.71% | 0.69% | 0.42% | 0.48% | 0.62% | 0.13% |
| Tensile Force | 1.18% | 0.77% | 0.46% | 0.56% | 0.73% | 0.19% |
| FS | Error | Range | Dimension | Applications | Mass | Cost |
|---|---|---|---|---|---|---|
| Tandem FS [19] | 1.54% | 0–819 N | Length 7 cm Diameter 3.2 cm | Robotics and perceptual information | \ | \ |
| Axis-Symmetrical Force Transducers [20] | 3.0% | 0–50 kN | Length 19 cm Breadth 5 cm Height 19 cm | Automation industries and verification of material testing machines | \ | \ |
| MEMS FS [21] | 1.0% | 0.5–5 N | Length 1.1 cm Breadth 0.12 cm Thickness 0.06 cm | Automotive industry | \ | \ |
| FS with novel strain gauge [22] | 1.78% | 0–800 N | Length 1.75 cm Breadth 0.8 cm Height 0.8 cm | Intelligent automation of robot | \ | \ |
| Novel six-axis FS [23] | 2.0% | 0–800 N | Length 1.75 cm Breadth 0.8 cm Height 0.8 cm | Robotics | \ | \ |
| Mechanical decoupling FS [24] | 5.2% | 0–800 N | Length 3.7 cm Diameter 9.2 cm | Biomechanics and sports medicine | \ | \ |
| Weight sensing device [27] | 5.0% | 0–500 kN | Length 40 cm Breadth 12.5 cm Height 5 cm | Detection of heavy objects | \ | \ |
| Flexible FS based on the hall effect [28] | 6.9% | 0–40 N | Diameter 6 cm Height 1.1 cm | Tactile and healthcare applications | \ | \ |
| Novel sensor for robot applications [29] | 1.18% | 0–50 N | Diameter 2.5 cm Height 1.9 cm | Robot applications | \ | \ |
| Planar force and torque sensors [30] | 0.29% | 0–0.1 kN | Diameter 7.5 cm Height 1.2 cm | Robotic systems | \ | \ |
| 3D-printed FS utilizing elastic elements arranged orthogonally [31] | 2.18% | 0–2.8 N | Diameter 7 cm Height 0.4 cm | Automated manipulation and advanced manufacturing | \ | \ |
| 3D-printed micro-FS [32] | 1.14% | 0–0.12 N | Length 3.5 cm Breadth 1 cm Height 0.3 cm | Microscale integration, healthcare implementations and fine-tuning of microdevices | \ | \ |
| 3D-printed FS utilizing optical fiber grating [33] | 0.98% | 0.9–2.7 N | Length 5.7 cm Diameter 3 cm | Analysis of pulse patterns | \ | \ |
| Forsentek-F3F (Forsentek Enterprise) | 0.3% | 0–2 kN | Length 12 cm Breadth 12 cm Height 3 cm | Automated systems, force simulation platform, and industrial testing | 3.2 kg | $1236 |
| DAYSENSOR DY920-B (Dayang Sensing Enterprise) | 0.1% | 0–100 N | Length 13.2 cm Breadth 7.6 cm Height 2 cm | Industrial production and automation | 0.5 kg | $123 |
| Burster 8524-series (Burster Enterprise) | 0.1% | 0–2 kN | Height 1.6 cm Diameter 5.45 cm | Machinery industry and batch weighing apparatus | 0.57 kg | $751 |
| This work | 0.77% | 0–83 N | Length 9.8 cm Breadth 7 cm Height 8.8 cm | Robotics, automotive industry, and iatrical equipment | 0.3 kg | $28 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, P.; Xin, S.; Mao, Y.; Dang, F.; Huang, F. Design and Validation of Single-Axis 3D-Printed Force Sensor Based on Three Nested Flexible Rings. Sensors 2024, 24, 5441. https://doi.org/10.3390/s24165441
Yang P, Xin S, Mao Y, Dang F, Huang F. Design and Validation of Single-Axis 3D-Printed Force Sensor Based on Three Nested Flexible Rings. Sensors. 2024; 24(16):5441. https://doi.org/10.3390/s24165441
Chicago/Turabian StyleYang, Pengfei, Shiwei Xin, Yuqing Mao, Fei Dang, and Feng Huang. 2024. "Design and Validation of Single-Axis 3D-Printed Force Sensor Based on Three Nested Flexible Rings" Sensors 24, no. 16: 5441. https://doi.org/10.3390/s24165441
APA StyleYang, P., Xin, S., Mao, Y., Dang, F., & Huang, F. (2024). Design and Validation of Single-Axis 3D-Printed Force Sensor Based on Three Nested Flexible Rings. Sensors, 24(16), 5441. https://doi.org/10.3390/s24165441