
Collision Avoidance Path Planning and Tracking Control for Autonomous Vehicles Based on Model Predictive Control


Abstract
1. Introduction
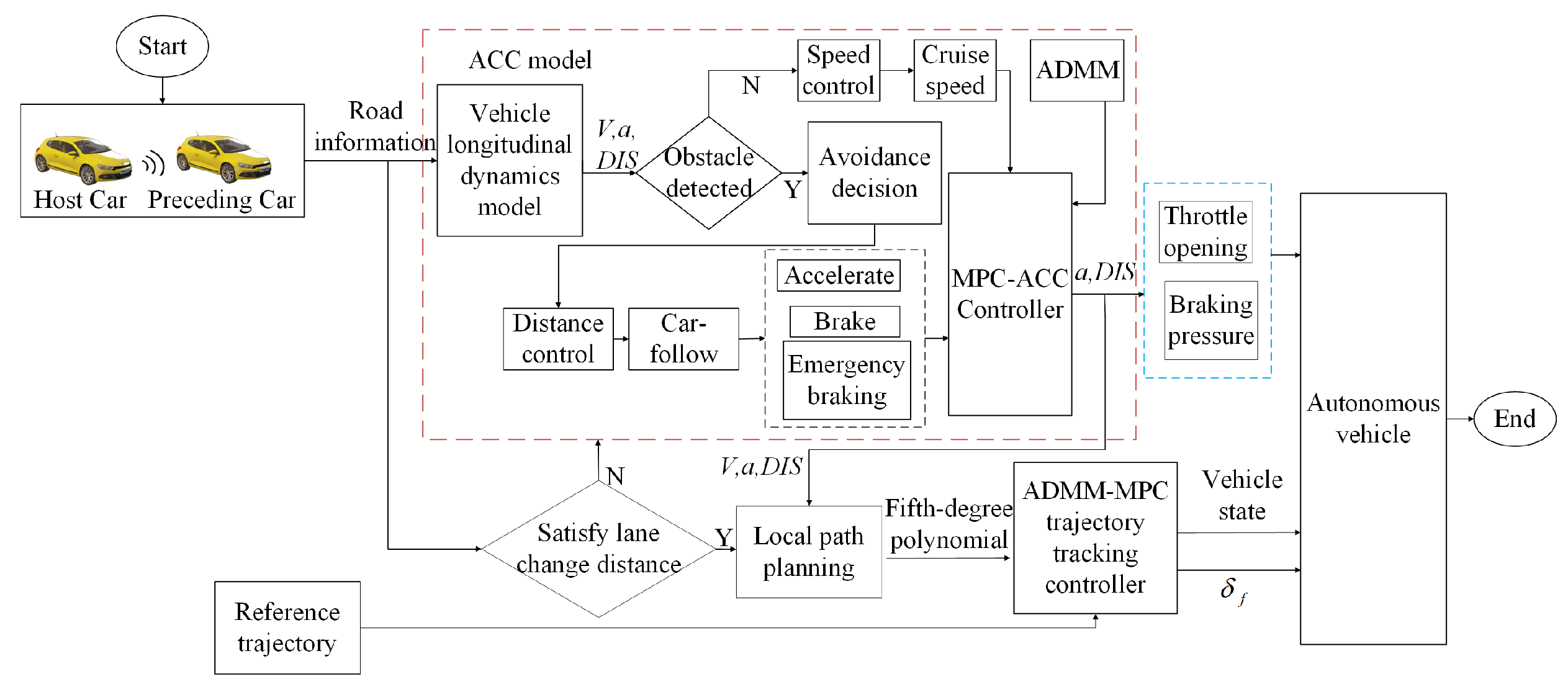
2. System Control Framework
3. Model Establishment
3.1. Upper Controller Design
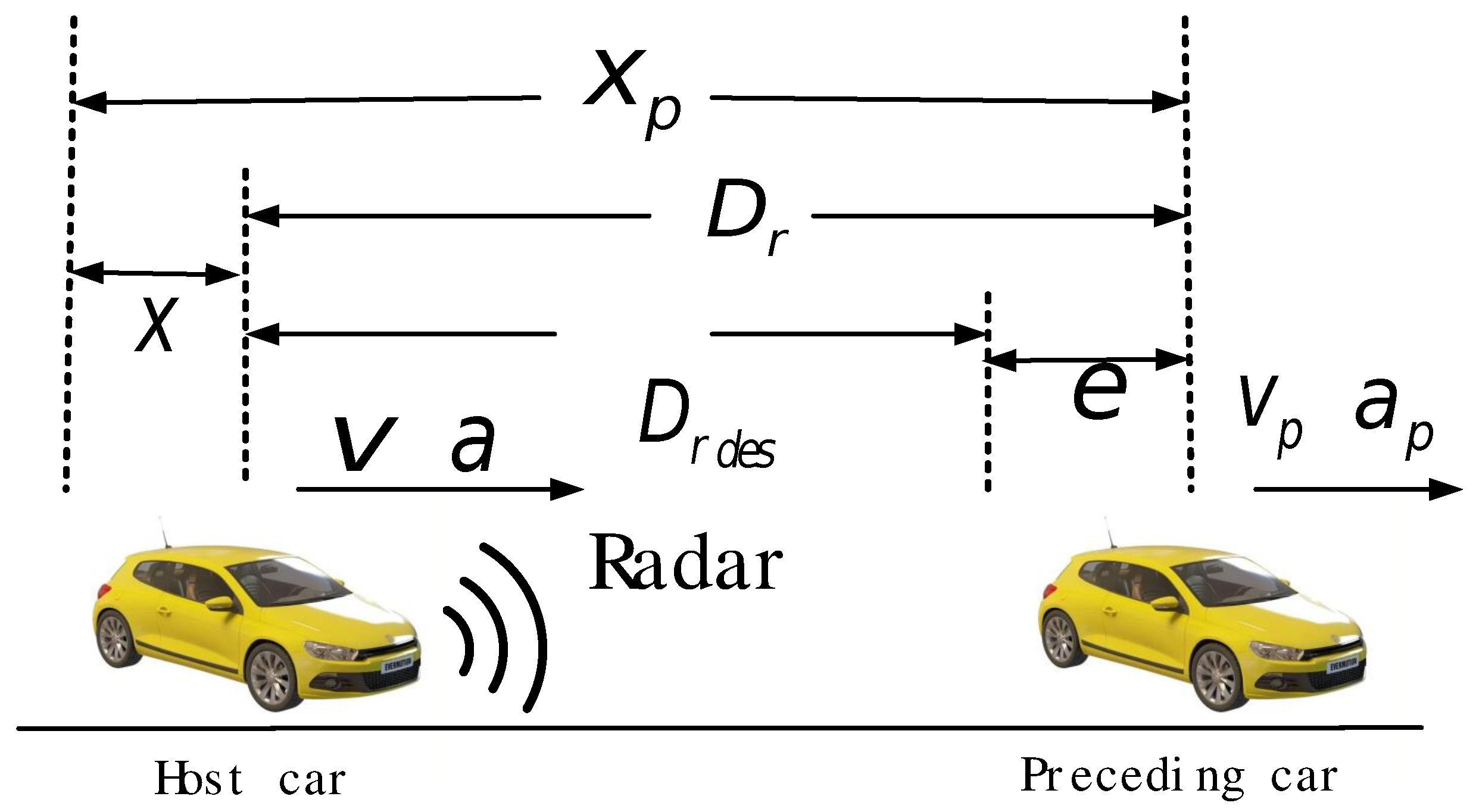
3.1.1. Car-Following Mode
3.1.2. Predictive Model and Objective Function Design
3.1.3. Transformation and Solution of the Quadratic Programming Problem
3.2. Lower Controller Design
4. The Combination of Adaptive Cruise Control and Obstacle Avoidance
4.1. Designing Mode Switching Conditions
4.1.1. Car-Following Distance
4.1.2. Braking Distance
4.1.3. Emergency Steering Distance
4.2. Obstacle Avoidance Planning
4.2.1. Obstacle Avoidance Function
4.2.2. Trajectory Fitting
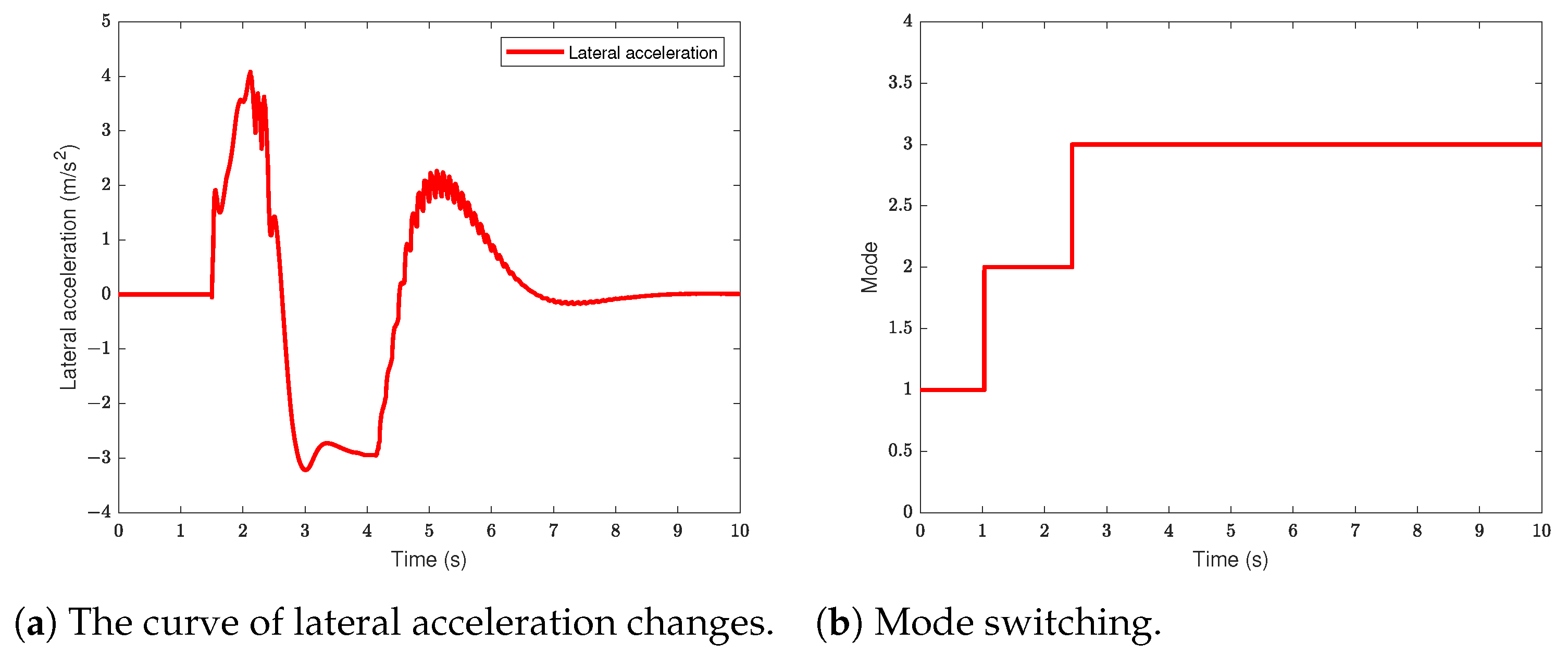
4.3. Overall Mode Switching Strategy Design
5. Simulation Validation
5.1. The Scenario of Dynamic Obstacle Avoidance in a Dual-Lane Situation
5.2. Emergency Braking and Steering Avoidance Scenario
5.3. Following Condition
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Alcaina, J.; Cuenca, A.; Salt, J.; Zheng, M.; Tomizuka, M. Energy-Efficient Control for an Unmanned Ground Vehicle in a Wireless Sensor Network. J. Sens. 2019, 9, 7085915. [Google Scholar] [CrossRef]
- Fildes, B.; Keall, M.; Bos, N.; Page, Y.; Pastor, C.; Pennisi, L. Effectiveness of low speed autonomous emergency braking in real-world rear-end crashes. Accid. Anal. Prev. 2015, 81, 24–29. [Google Scholar] [CrossRef] [PubMed]
- Graf, M.; Bernardini, D.; Esen, H.; Bemporad, A. Spatial-Based Predictive Control and Geometric Corridor Planning for Adaptive Cruise Control Coupled with Obstacle Avoidance. IEEE Trans. Control. Syst. Technol. 2018, 26, 38–50. [Google Scholar] [CrossRef]
- Li, H.; Zheng, T.; Xia, F.; Gao, L.; Ye, Q.; Guo, Z. Emergency collision avoidance strategy for autonomous vehicles based on steering and differential braking. Sci. Rep. 2022, 12, 22647. [Google Scholar] [CrossRef] [PubMed]
- Zou, J.; Wu, W.; Yan, Y.; Gong, B. Vehicle Active Collision Avoidance Strategy Based on Model Predictive Control under Urban Road Conditions. J. Wuhan Univ. Sci. Technol. 2022, 45, 60–67. [Google Scholar]
- Hu, J.; Liu, P.; Li, G. Research on integrated steering-braking control of large passenger cars based on MPC. Automot. Technol. 2019, 2, 58–62. [Google Scholar]
- Kim, J.; Pea, D.; Lim, M. Obstacle Avoidance Path Planning Algorithm Based on Model Predictive Control. In Proceedings of the 18th International Conference on Control, Automation and Systems (ICCAS), PyeongChang, Republic of Korea, 17–20 October 2018; pp. 141–143. [Google Scholar]
- Dong, Z.; Xu, X.; Zhang, X.; Li, X.; Liu, X. Real-time Motion Planning Based on MPC With Obstacle Constraint Convexification for Autonomous Ground Vehicles. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 1035–1041. [Google Scholar]
- Kanchwala, H.; Bezerra, V.I.; Aouf, N. Cooperative path-planning and tracking controller evaluation using vehicle models of varying complexities. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 235, 2877–2896. [Google Scholar] [CrossRef]
- Bageshwar, V.L.; Garrard, W.L.; Rajamani, R. Model predictive control of transitional maneuvers for adaptive cruise control vehicles. IEEE Trans. Veh. Technol. 2004, 53, 1573–1585. [Google Scholar] [CrossRef]
- Mosharafian, S.; Velni, J.M. Cooperative Adaptive Cruise Control in a Mixed-Autonomy Traffic System: A Hybrid Stochastic Predictive Approach Incorporating Lane Change. IEEE Trans. Veh. Technol. 2023, 72, 136–148. [Google Scholar] [CrossRef]
- Karapınar, U.; Gören-Sümer, L. Laguerre MPC Formulation for Automotive Adaptive Cruise Control Application and Performance Analysis. In Proceedings of the 2018 6th International Conference on Control Engineering & Information Technology (CEIT), Istanbul, Turkey, 25–27 October 2018; pp. 1–6. [Google Scholar]
- Wei, H.; He, Y.; Wei, L.; Zhang, D.; Ye, Y. Variable weight multi-objective adaptive cruise control strategy based on naive Bayes algorithm. J. Northwestern Univ. Nat. Sci 2020, 50, 23–30. [Google Scholar]
- Hua, X.; Duan, J.; Tian, X. Research on vehicle obstacle avoidance based on penalty function of restricted area and MPC multiplication prediction. Comput. Eng. Appl. 2018, 54, 131–138. [Google Scholar]
- Gao, F.; Han, Y.; Li, S.; Xu, S.; Dang, D. Accurate Pseudospectral Optimization of Nonlinear Model Predictive Control for High-Performance Motion Planning. IEEE Trans. Intell. Veh. 2023, 8, 1034–1045. [Google Scholar] [CrossRef]
- Li, J.; Zhou, W.; Tang, S. Obstacle avoidance trajectory planning for intelligent vehicle lane change based on adaptive fitting. Automot. Eng. 2023, 45, 1174–1183+1199. [Google Scholar]
- Wang, J.; Guo, Y.; Wang, Q.; Gao, J.; Chen, Y. Event-triggered MPC for Collision Avoidance of Autonomous Vehicles Considering Trajectory Tracking Performance. In Proceedings of the 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), Guilin, China, 9–11 July 2022; pp. 514–520. [Google Scholar]
- Wang, M.; Tang, X.; Yang, K.; Li, G.; Hu, X. Motion planning method for autonomous vehicles considering prediction risk. Automot. Eng. 2023, 45, 1362–1372+1407. [Google Scholar]
- Hajiloo, R.; Abroshan, M.; Khajepour, A.; Kasaiezadeh, A.; Chen, S.K. Integrated Steering and Differential Braking for Emergency Collision Avoidance in Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3167–3178. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Zheng, T.; Li, H. Research on obstacle avoidance method of intelligent vehicle in complex traffic environment. Int. J. Intell. Syst. 2023, 18, 1275–1286. [Google Scholar]
- Han, Y.; Zhang, K.; Bin, Y.; Qin, C.; Xu, Y.; Li, X.; He, L.; Ge, J.; Wang, T.; Liu, H. Obstacle avoidance principle based on convex approximation and prediction algorithm of path planning model for unmanned vehicles. Acta Autom. Sin. 2020, 46, 153–167. [Google Scholar]
- Liu, Z.; Yuan, X. Adaptive velocity region-based path planning system for autonomous vehicle under multiple obstacles with various velocities. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 288. [Google Scholar] [CrossRef]
- Xiao, S.; Ge, X.; Han, Q.L. Secure and collision-free multi-platoon control of automated vehicles under data falsification attacks. Automatica 2022, 145, 110531. [Google Scholar] [CrossRef]
- Xiao, S.; Ge, X.; Wu, Q.; Ding, L. Co-design of bandwidth-aware communication scheduler and cruise controller for multiple high-speed trains. IEEE Trans. Veh. Technol. 2023, 73, 4993–5004. [Google Scholar] [CrossRef]
- Yuan, C.; Lin, Y.; Shen, J.; Chen, L.; Cai, Y.; He, Y.; Weng, S.; Wu, X.; Yuan, Y.; Gong, Y. Research on Active Collision Avoidance and Hysteresis Reduction of Intelligent Vehicle Based on Multi-Agent Coordinated Control System. World Electr. Veh. J. 2023, 14, 16. [Google Scholar] [CrossRef]
- Dong, D.; Ye, H.; Luo, W.; Wen, J.; Huang, D. Fast Trajectory Tracking Control Algorithm for Autonomous Vehicles Based on the Alternating Direction Multiplier Method (ADMM) to the Receding Optimization of Model Predictive Control (MPC). Sensors 2023, 23, 8391. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Jiang, J.; Lv, Z.; Zhang, H. Research on cooperative adaptive cruise control strategy based on improved MPC. J. Syst. Simul. 2022, 34, 2087–2097. [Google Scholar]
- Wang, J.; Wang, J.; Wang, H.; Zhang, H. Research on Longitudinal Speed Control of Autonomous Vehicles Based on Model Predictive Control. Mech. Des. 2021, 38, 69–74. [Google Scholar]
- Shang, M.; Wang, S.; Stern, R. A Two-Condition Continuous Asymmetric Car-Following Model for Adaptive Cruise Control Vehicles. IEEE Trans. Intell. Veh. 2024, 9, 3975–3985. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Unit |
|---|---|---|
| Vehicle weight | 1723 | kg |
| Wheelbase | 2.7 | m |
| lateral moment of inertia | 4331.6 | kg · |
| front and rear axle roll stiffness | 2328/2653 | N · m/rad |
| front and rear axle roll damping | 47,298/37,311 | N · m/rad |
| wheel lateral stiffness | 61,900 | N/rad |
| wheel rotational inertia | 0.9 | kg · |
| Scenarios | Average Computation Time for Scenario 1 (s) | Average Computation Time for Scenario 2 (s) | Average Computation Time for Scenario 3 (s) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Method | ADMM-MPC | ASM | IPM | ADMM-MPC | ASM | IPM | ADMM-MPC | ASM | IPM |
| Test 1 | 0.0712 | 0.0854 | 0.1254 | 0.0517 | 0.0685 | 0.2124 | 0.3124 | 0.3795 | 0.4657 |
| Test 2 | 0.0724 | 0.0920 | 0.1221 | 0.0514 | 0.0654 | 0.2024 | 0.3246 | 0.3469 | 0.4950 |
| Test 3 | 0.0719 | 0.0831 | 0.1383 | 0.0602 | 0.0712 | 0.2314 | 0.3519 | 0.3912 | 0.4631 |
| Test 4 | 0.0832 | 0.1055 | 0.1249 | 0.0531 | 0.0679 | 0.1987 | 0.2997 | 0.4006 | 0.4658 |
| Test 5 | 0.0706 | 0.0847 | 0.1267 | 0.0529 | 0.0687 | 0.2013 | 0.3473 | 0.3570 | 0.4725 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, D.; Ye, H.; Luo, W.; Wen, J.; Huang, D. Collision Avoidance Path Planning and Tracking Control for Autonomous Vehicles Based on Model Predictive Control. Sensors 2024, 24, 5211. https://doi.org/10.3390/s24165211
Dong D, Ye H, Luo W, Wen J, Huang D. Collision Avoidance Path Planning and Tracking Control for Autonomous Vehicles Based on Model Predictive Control. Sensors. 2024; 24(16):5211. https://doi.org/10.3390/s24165211
Chicago/Turabian StyleDong, Ding, Hongtao Ye, Wenguang Luo, Jiayan Wen, and Dan Huang. 2024. "Collision Avoidance Path Planning and Tracking Control for Autonomous Vehicles Based on Model Predictive Control" Sensors 24, no. 16: 5211. https://doi.org/10.3390/s24165211
APA StyleDong, D., Ye, H., Luo, W., Wen, J., & Huang, D. (2024). Collision Avoidance Path Planning and Tracking Control for Autonomous Vehicles Based on Model Predictive Control. Sensors, 24(16), 5211. https://doi.org/10.3390/s24165211