1. Introduction
Internet of Things (IoT) is a rapidly growing paradigm that involves things or objects interacting and has received widespread attention from both industry and academia [
1,
2]. IoT has many potential applications in the health-care, environmental, industrial, commercial, and smart-city fields that will profoundly change how humans live [
3]. For the widely discussed 5th generation (5G) communication system, in recent years, one of the dominant communication paradigms has been the connection of a vast number of devices [
4,
5]. However, for such large-scale networks, nonnegligible issues include the power consumption, frequency spectrum crowding, and maintenance costs. For instance, traditional radio-frequency identification (RFID) readers require the active emission of an electromagnetic wave on specific frequency bands in order to identify RFID tags, though the RFID tags can use passive or ultralow power dissipation [
2]. These costs restrict further device deployment in massive IoT sensor networks.
In the development of green IoT networks, AmBC has been considered to have potential as a technology for batteryless communications [
6,
7]. The authors in [
8] first proposed the concept of AmBC systems, which allow backscatter devices utilize existing, ambient RF signals in their environments to communicate with each other or harvest energy to keep themselves working. The authors in [
8] also designed AmBC prototypes to demonstrate the feasibility of employing AmBC systems that use ambient RF signals from TV towers. Applications such as smart-card systems and item detection in grocery stores have also been demonstrated to reveal the potential value of AmBC in practical uses of IoT sensor networks. Subsequently, numerous studies have developed AmBC systems that use different frequency bands and different forms of ambient RF signals as carriers, including frequency modulation (FM) radio [
9,
10], Bluetooth [
11,
12], and Wi-Fi APs [
13,
14]. AmBC systems have many advantages compared to traditional wireless communications and backscatter communications, i.e., (1) because they modulate information bits on ambient RF signals, AmBC systems do not require active components like oscillators and thus could save energy and circuit-design space; (2) because they harvest energy from the environment, AmBC systems would reduce dependence on large-capacity batteries and routine maintenance; (3) because they remove the specific-frequency-band readers, AmBC systems will reduce deployment and maintenance costs and avoid frequency spectrum crowding. Some researchers have also asserted that utilizing AmBC in wireless communication systems could improve outage capacity [
15] and energy efficiency [
16].
In order to improve the performance of AmBC systems, many novel designs have been proposed in recent years that aim to maximize the use of communication resources. The authors in [
17] extended AmBC systems into dual-band designs and designed a dual-band AmBC system in order to allow AmBC devices to simultaneously utilize two ambient RF bands to achieve 4-QAM modulation. The authors in [
18] designed an all-digital AmBC system by utilizing the impedance variation of the microcontroller IO pin to modulate information bits, further reducing the complexity and costs of AmBC systems. In [
19,
20], the high-order modulations M-FSK and M-PSK are implemented in AmBC systems to improve the data rate and get better symbol error rate performance than is achieved in conventional on–off keying (OOK) modulation. The authors in [
21] incorporated spatial modulation into AmBC systems and significantly improved the throughput compared to that of a single-antenna AmBC by merging the index information of the active antenna into symbol backscatter.
However, it should be noted that few studies have focused on exploiting polarization patterns in AmBC systems, and most studies of AmBC systems have neglected the effect of polarization mismatch. Related works [
22,
23] provided preliminary experiments on polarization diversity in AmBC systems. In [
22], the authors used rotation dipoles and reconfigurable antennas to modulate information by switching among polarization patterns. The results of simulations and experiments show that reconfigurable tags have better performance than non-reconfigurable tags. In [
23], the authors designed a polarization conversion-based AmBC system that converts a linearly polarized ambient RF signal into a circularly polarized modulated signal in order to cancel the direct-path interference in AmBC systems. By deploying a reader with both left-handed and right-handed circularly polarized antennas and outputting the difference, the system cancels the linearly polarized ambient RF signal and detects the circularly polarized modulated signal. However, the experiments in these works consider only the ideal case wherein a single-frequency carrier is generated as an ambient RF signal in an anechoic chamber.
Moreover, channel estimation in AmBC systems is extremely difficult. Because the AmBC devices are ultra-low power devices that cannot operate channel-estimation algorithms, the channel coefficient of the path between the ambient RF source and the AmBC devices is unknown to the reader. This limitation presents many challenges for symbol detection in AmBC systems wherein the detection methods used in conventional wireless communications may not work. Several works that have made contributions regarding how to indirectly obtain or avoid channel estimation in AmBC systems [
24,
25,
26,
27]. In [
24], the authors utilized differential coding in AmBC systems and proposed noncoherent detection methods, including a joint-energy detector, threshold derivation, and parameter estimation. In [
25], the authors further proposed semi-coherent detection methods for u se in AmBC systems, in which several training symbols are used to estimate detection parameters. In [
26], the authors utilized Manchester coding in AmBC systems and proposed the use of energy detectors. Each of the original symbols is implicitly contained in the relative values of the signal energy of the first and second halves of the Manchester-encoded symbols. This method eliminates the need to estimate the detection threshold. In [
27], the authors examined the use of multi-antenna AmBC devices and proposed a detection method based on Bartlett’s test. The advantage of this approach is that it does not require knowledge of certain parameters, including the power of the ambient RF source and the channel coefficient. In addition to these conventional methods, machine learning has potential as a useful technology and has been used in several studies of AmBC signal detection in recent years [
28,
29,
30,
31,
32]. Machine learning-assisted detection methods offer several advantages, such as the ability to find the intrinsic relationships within datasets and the ability to adapt autonomously to complex environments. These advantages would further reduce the need for parameter estimation and improve detection accuracy in AmBC systems.
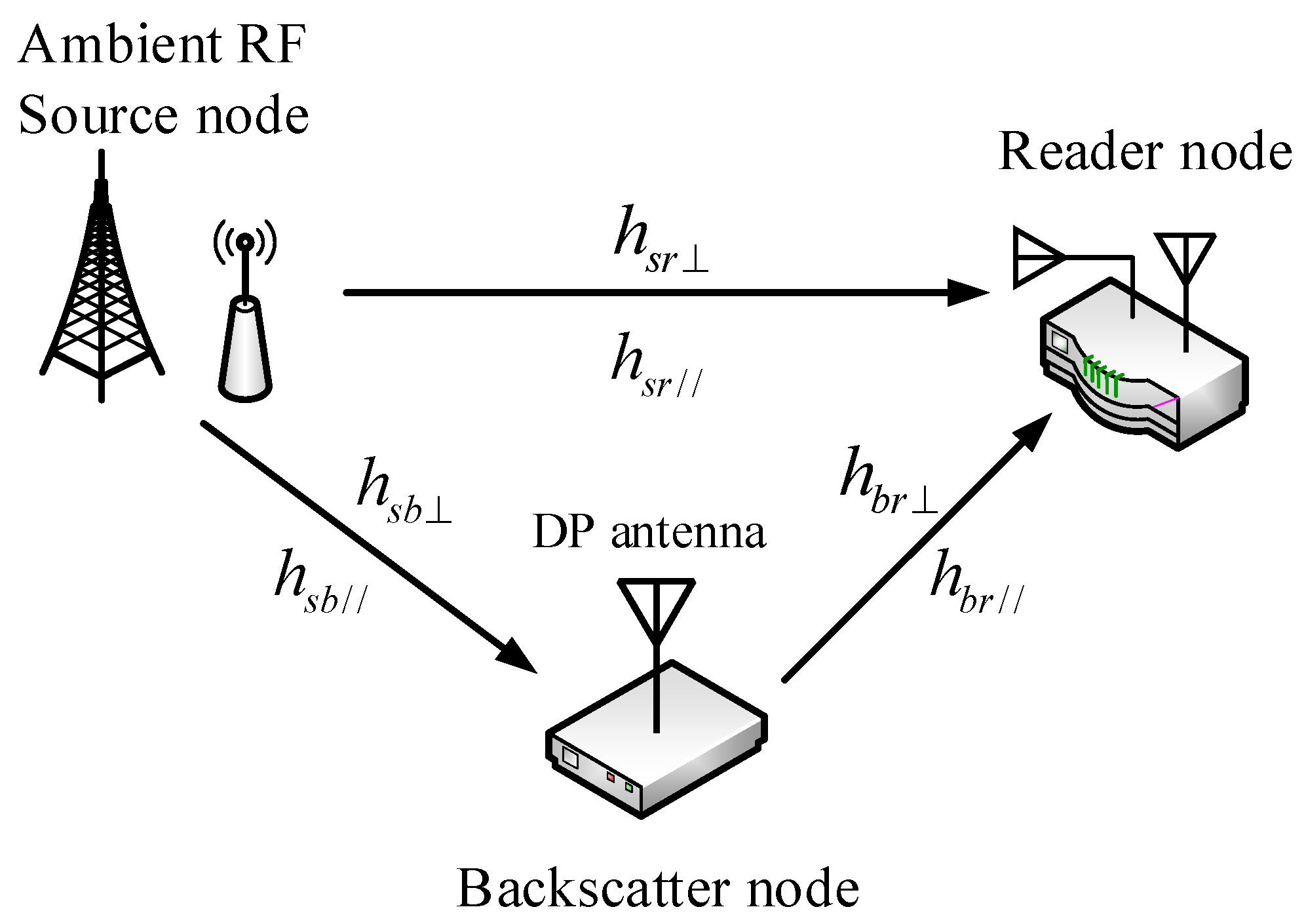
Motivated by these studies, in this paper, we provide a study of a DPAm system that takes into account details of signal-propagation conditions, including the effect of polarization mismatch. We present two different structures for backscatter nodes along with their corresponding transmission models for a DPAm system. Then, we explore a parallel backscatter mode that employs differential coding for each polarization pattern. This approach includes deriving the detection threshold in order to improve the symbol rate compared to that achieved in a SPAm system. Analytical throughput is also obtained. Moreover, we note that the variance in the ambient RF signal is greater than the variance in the channel coefficient, especially in the case of a high signal-to-noise ratio (SNR), which means the effect of the ambient RF signal is stronger. Hence, we also consider a simultaneous backscatter mode with Manchester coding on both polarization patterns. To deal with the problem of power imbalance caused by the randomness of the channel coefficients and polarization deflection angles, we propose a power average detector and a clustering detector for use in simultaneous backscatter mode in a DPAm system. The results of this work indicate that such a DPAm system could have significantly improved throughput compared to a SPAm system. In addition, the proposed clustering detector is more robust than the power average detector in short training sequences and complex environments.
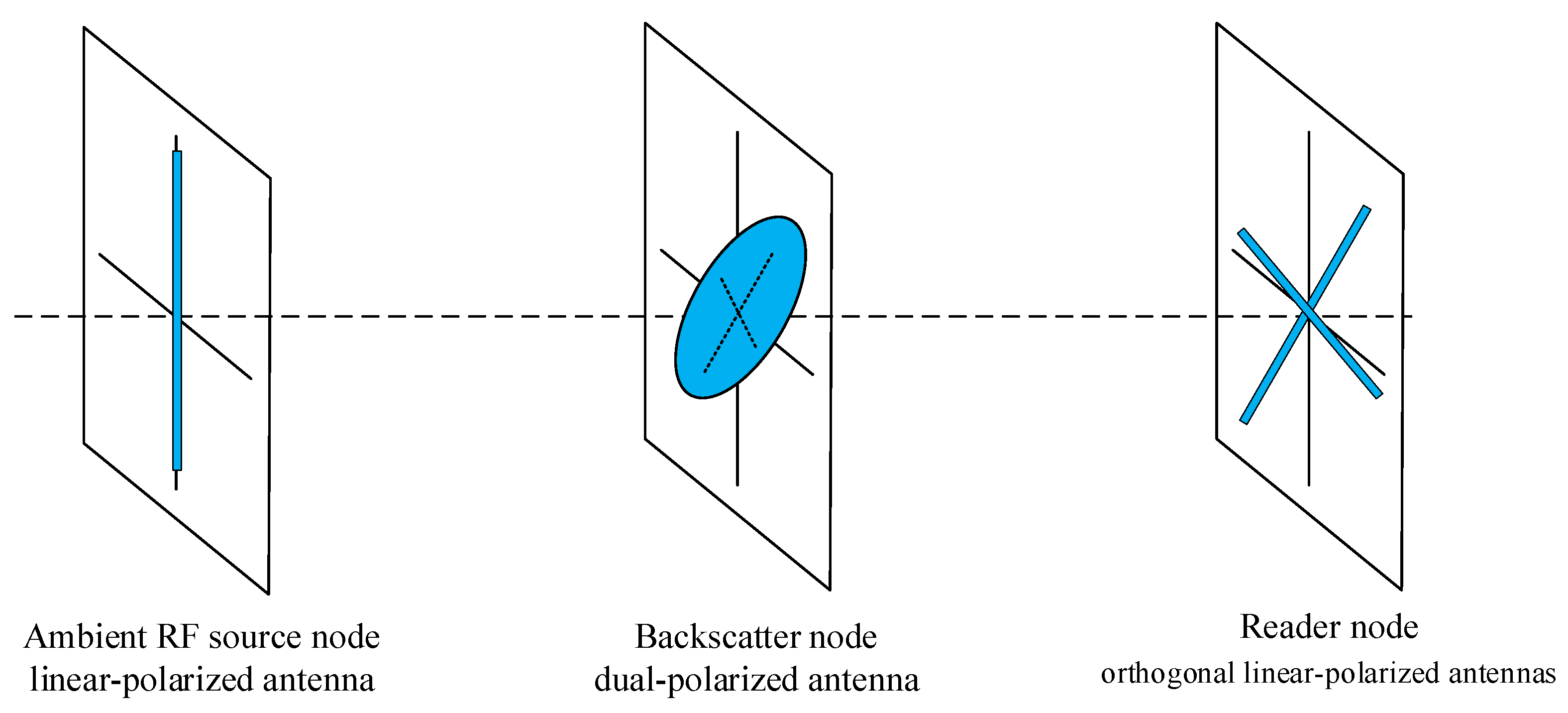
Adopting polarization diversity in AmBC systems has obvious advantages. First and foremost, because the ambient RF signals are usually degraded by from severe reflection and backscattering caused by objects in the physical environment, e.g., buildings, trees, ground, rain and snow, they are already distorted and rotated by the time they reach the AmBC devices. Both a multipath effect and polarization mismatch result. Thus, the single-polarized antenna in the SPAm system will lose a portion of the ambient RF signal power for ambient backscatter communication due to the polarization mismatch, which will lead to a decrease in communication performance. Through the use of a dual-polarized antenna, the DPAm system has the ability to more fully exploit the ambient RF signals, especially for the extreme case wherein the arriving ambient RF signals are almost orthogonal to the single-polarized antenna. In such a case, the SPAm system will struggle to transmit information, but the DPAm system will maintain transmission on the other polarization pattern, showing the robustness of the system. In addition, the dual-polarized antenna in the DPAm system could backscatter the ambient RF signals into orthogonal channels, which will avoid the mutual interference of the massive-input-massive-output (MIMO) channels. Last but not least, dual-polarized antenna with elaborate designs could be smaller in size, which would reduce the physical size of the AmBC devices compared to array antennas. In summary, the proposed DPAm system has potential applications in dynamically complex environments, in particular wireless wearable sensors, object localization, and environmental monitoring [
6,
33,
34].
The remainder of the paper is organized as follows. In
Section 2, the DPAm node structures and transmission model are presented in detail.
Section 3 describes the parallel backscatter mode with differential coding and the corresponding detector in the DPAm system.
Section 4 describes the simultaneous backscatter mode with Manchester coding and corresponding detectors in the DPAm system. Numerical simulation results and discussions are presented in
Section 5, and
Section 6 concludes the paper.
4. Simultaneous Backscatter Mode with Manchester Coding
Although the parallel backscatter mode and the joint-energy detector are simple, their operation requires various signal parameters. As it is difficult to precisely determine signal variance, we further consider detectors that do not require estimation of CSI. Hence, we propose adopting Manchester coding on both polarization patterns. We also propose switching from parallel backscatter mode to simultaneous backscatter mode. Finally, we propose using a simple power average detector and an unsupervised machine learning-based detector that uses K-means clustering.
4.1. Manchester Coding Scheme
As channel coefficients generally have similar variances in similar environments, the variance of the ambient RF signal will be larger than the variance of the channel coefficients, especially in the case of high SNR. Thus, the effect of the ambient RF signal will be greater. In contrast to the significant power fluctuations in the ambient RF signal between adjacent symbol time slots, the ambient RF signal s(t) is consistent for different polarization patterns in the same time slot. It is thus better to encode information in the same backscatter symbol time slot in order to improve the stability of the DPAm system. In order to further exploit the advantages of DPAm and simplify the detection schemes, we propose the use of a simultaneous backscatter mode coupled with a Manchester coding scheme for the DPAm system.
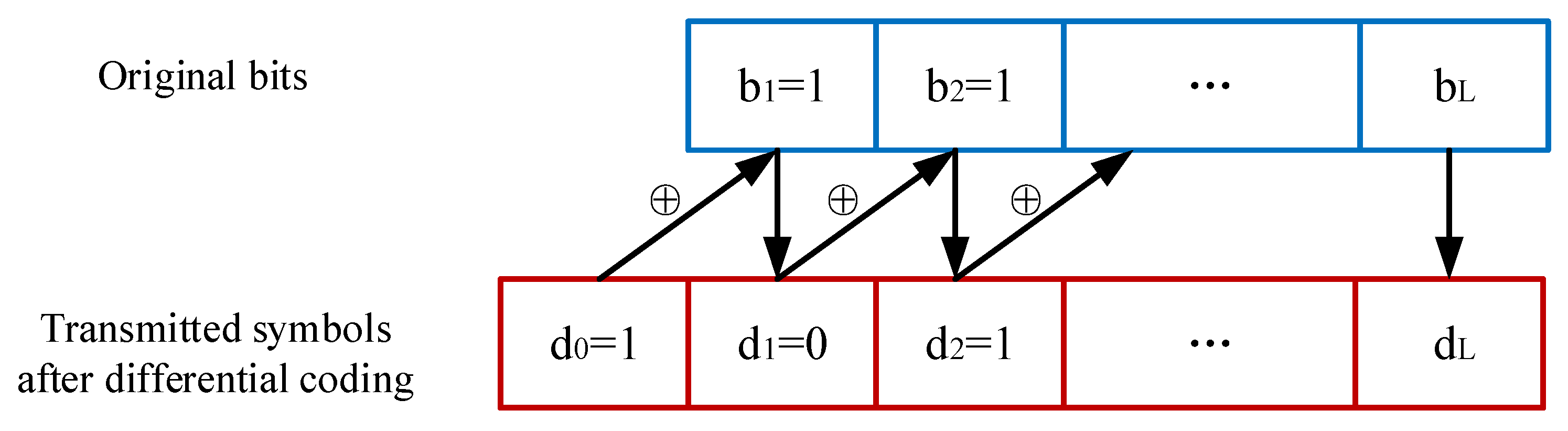
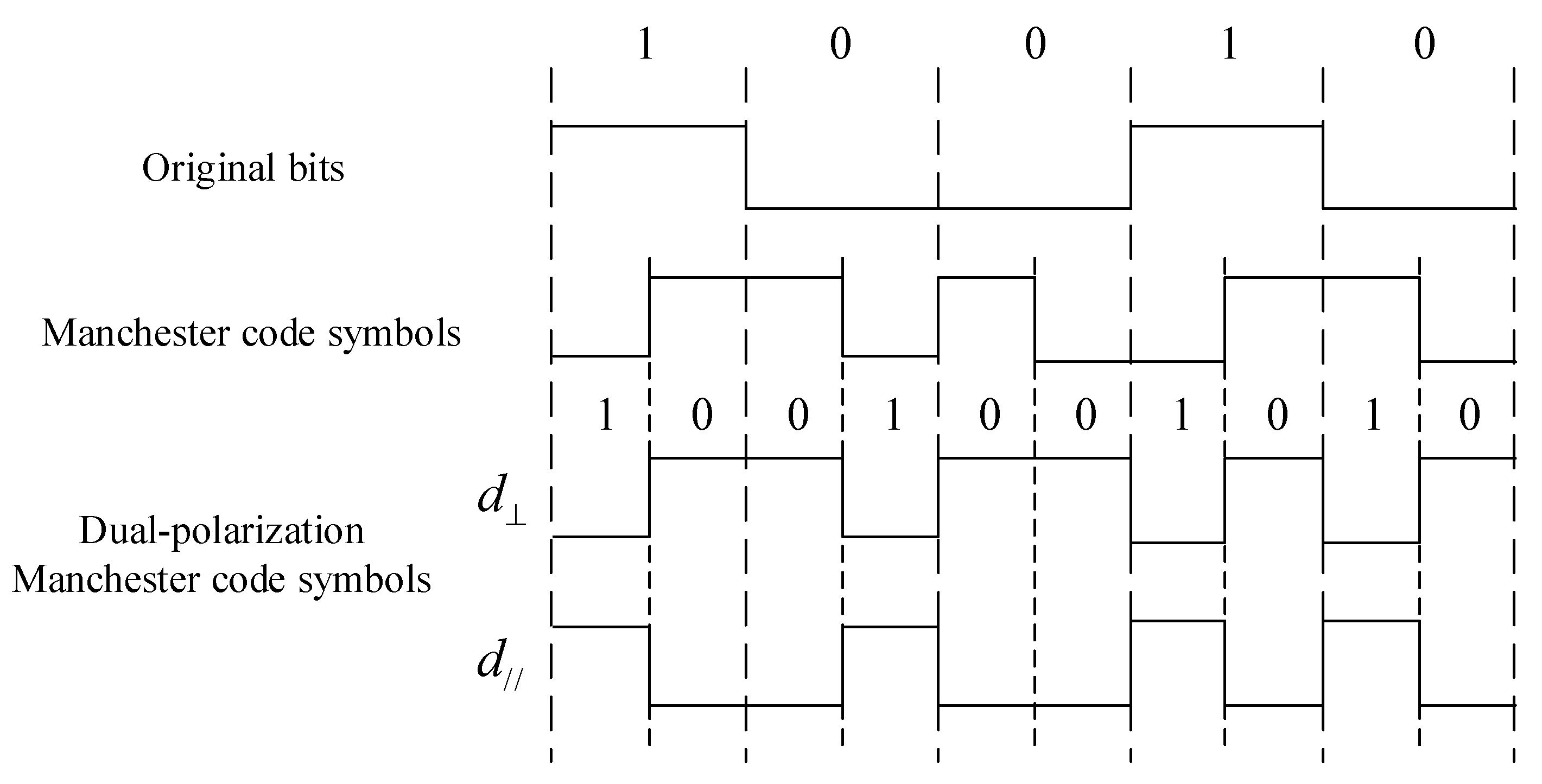
Manchester code is a simple block code that separately maps bit ‘0’ and ‘1’ into ‘01’ and ‘10’. It has been widely used in RFID [
37,
38,
39] and AmBC systems [
26,
40,
41]. In this paper, we adopt the IEEE 802.3 standard [
42] convention for Manchester coding, wherein the original bit ‘0’ is represented by ‘10’ and the original bit ‘1’ is represented by ‘01’. Then, we modulate the first half of the Manchester code symbol on one of the polarization patterns, i.e.,
, and the second half on the other polarization pattern, i.e.,
, as shown in
Figure 10. In other words, the adoption of Manchester coding means that only one of the polarization patterns will be activated to backscatter at all times.
In contrast to a SPAm system with Manchester coding, the proposed DPAm system uses two polarization patterns to modulate two bits of one Manchester symbol and thus can theoretically double the data rate. We also consider relative data rate gain in the simulation results.
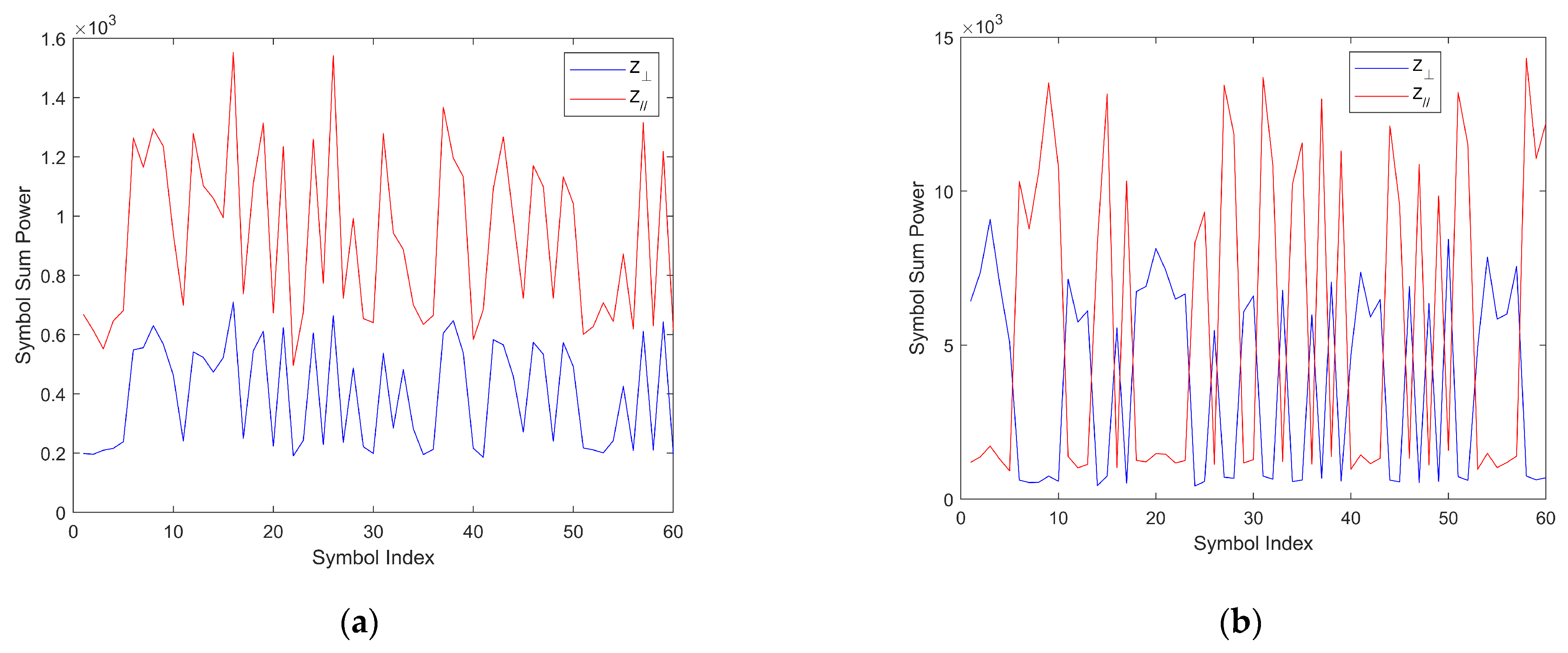
As small-scale multipath fading can both increase and decrease the entire received signal, and as the effect of the unknown included angle leads to unequal and random direct path received power on the two polarization patterns
and
, there is a challenge in this system. On the same polarization pattern, the received signal power for bit ‘1’ may not always be higher than that for bit ‘0’. Moreover, on different polarization patterns, the average received signal power will be uncertain, leading to a “power imbalance problem” in the DPAm system. In parallel backscatter mode, the two polarization patterns are treated as independent, which avoids the power imbalance problem; however, the power imbalance problem presents challenges in simultaneous backscatter mode. To clearly demonstrate the power imbalance problem, two samples of the backscatter symbol power in one frame are shown in
Figure 11. It can be readily seen that the backscatter symbol power on different polarization patterns has different means and variances. In addition, the power trends for each backscatter symbol in different polarization patterns can be either the same and or opposite each other when using Manchester coding. Thus, it is not possible to directly compare the received power on different polarization patterns or to compute a detection threshold as in
Section 3.2.
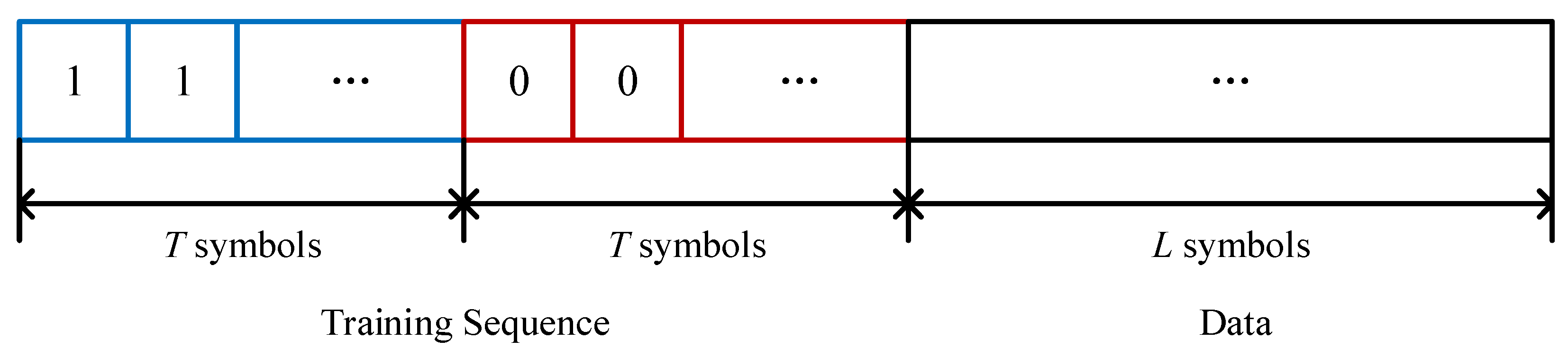
As CSI estimation is difficult in such a low-power system and in complex environments, indirect estimation of power relationships using known symbols is essential. For instance, we combine
T Manchester coding symbols representing ‘1’,
T Manchester coding symbols representing ‘0’, and
L unknown information symbols to form a frame. There, the 2
T symbols, which are known to the backscatter node and reader node, form the “training sequence”, as shown in
Figure 12. We will discuss how to use the training sequence to detect original bits without CSI estimation in subsequent sections.
4.2. Power Average Detector
In the context of analog circuits [
8], a “double filter” detector is proposed. The detector circuit has two lowpass filters with different cutoff frequencies. A short-term filter produces the signal envelope, and a long-term filter produces the average signal, which removes the high-frequency component of the ambient RF signal. Then, the comparator compares the two output voltage levels to identify the original information bits. In this framework, we propose using a power average detector. In digital analysis [
26,
29], it is common to consider a power set of the received signal in one backscatter symbol time slot. In this detector scheme, the power set offers a statistical representation of each backscatter symbol, replacing the signal envelope produced by the “short-term filter”. Representing the results as a statistical result, we have
as the power sets on the two polarization patterns of the
i-th symbol in the
j-th frame.
Benefiting from the training sequence and considering that the channel coefficients remain constant within each coherent frame, it is feasible to estimate the average power from the known symbols. From the training sequence setup shown in
Figure 12 and the dual-polarization Manchester coding shown in
Figure 10, we have the estimated average power on the two polarization patterns as
which can be seen as the average signal from the “long-term filter”. Then, the “zero-mean” symbol power set can be represented as
Hence, the different mean values of backscatter symbol power on different polarization patterns are effectively normalized. After we obtain the “zero-mean” symbol power set, the symbol power on one polarization pattern can be either larger or smaller than the symbol power on the other pattern in each symbol time slot. These relative power levels can be used to determine the two original information bits of each backscatter symbol in each frame. As the variance of backscatter symbol power still varies across polarization patterns and the ambient backscatter signal can either increase or decrease the received signal power at the reader node, it is essential to estimate the power level relationship between the two polarization patterns from the first
T Manchester coding symbols ‘1’ in the training sequence. Define
and
as
Then, if , when then the i-th symbol in the j-th frame will be demodulated to bit ‘1’; else, it will be bit ‘0’. Otherwise, if , when then the i-th symbol in the j-th frame will be demodulated to bit ‘1’; else, it will be bit ‘0’. Thus, when the “zero-mean” symbol power on different polarization patterns of an unknown data symbol bears a similar relationship to the first T training sequence symbols, this unknown data symbol indicates the same original information bit as the first T training sequence symbols.
Therefore, the power average detector can address the power imbalance problem by shifting from computing a detection threshold to finding the relationships between power symbols on different polarization patterns, regardless of which polarization pattern receives higher symbol power or whether the ambient backscatter signal increases or decreases the received symbol power in either polarization pattern.
We summarize the algorithm of the power average detector as follows (Algorithm 1):
| Algorithm 1 Power average detector |
Input: The received signal samples vectors of the j-th frame: ,
Output:
1: Training Phase: For m from 1 to 2T
2: by (27)
3: by (28) and (29)
4: end for
5: For l from 1 to L
6: by (28)
7:
8: , end if
9: , end if
10: end if
11: end for
12: Return |
After we obtain the detection results, we can calculate the BER and the throughput as in (20).
4.3. K-Means Clustering Detector
Although the power average detector is simple and intuitive, it may cause information loss because of the subtraction of the approximate average power, as outlined in (28). Detectors that can demodulate symbols directly from the original unbalanced power set on the two polarization patterns are required. From the analysis in
Section 4.2 and
Figure 11, we know that the most important factor in detecting the Manchester symbols in simultaneous backscatter mode is identifying the relationship between symbol powers on different polarization patterns. Therefore, an appealing approach is to directly cluster the symbols that exhibit similar relationships in their symbol power on different polarization patterns.
K-means algorithm is a kind of clustering algorithm in the expectation-maximization (EM) framework that has the advantages of computation simplicity, few parameters and good flexibility across different datasets. Combine and into a 2-dimensional vector , representing the power sets on the two polarization patterns of each symbol.
In E-step, calculate
to represent the Euclidean distance between each power set of unknown symbol
l in length
L data and
K = 2 clustering centers
. Then, label symbol
l into class
kl by choosing
.
In M-step, denote the loss function as
in order to represent the density of each clustering class, which consists of all the distances between the symbol power sets in class
k and the clustering center
. The purpose of clustering is to merge similar samples into the same class, and it is best to minimize the loss function. In mathematical terms, this means
while the partial derivative represents the trend in the variation of the loss function with
.
When
, the loss function is minimized. Then, we have
representing the new cluster center as the centroid of all samples in the same class. Update
instead of
, then repeat the E-step and the M-step until the labels of all
l symbols become constant or exceed the limit execution number.
However, as an unsupervised machine-learning algorithm, the K-means clustering algorithm also suffers from the local optimality issues caused by its sensitivity to the initial choice of cluster centers. Moreover, unsupervised machine learning groups samples into classes but does not give the meaning of each class. However, exact demodulated information bits are required in the detector scheme. In order to overcome these issues, we use the training-sequence symbols as the initial clustering centers. Note that the labels from the training-sequence symbols are not really used in the EM steps of the algorithm; they simply indicate the corresponding information bits for each output class. Thus, a training sequence of length T = 1 is sufficient. However, the K-means clustering detector comes with a trade-off, as it increases computation complexity and time delay. The detection output is available only after the whole frame has been processed, and the algorithm requires several iterations to converge.
Therefore, the K-means clustering detector can address the power imbalance problem. It can self-adaptively and directly cluster the backscatter symbols that exhibit similar relationships in terms of symbol power across different polarization patterns, avoiding the loss associated with estimating average power.
We summarize the algorithm used by the K-means clustering detector as follows (Algorithm 2):
| Algorithm 2 K-means clustering detector |
Input: The received signal samples vectors of the j-th frame: ,
Output: The detected symbols:
1: For m from 1 to 2 + L
2: by (26)
3: end for
4:
5:
6: For epochs from 1 to 1000
7: For l from 1 to L
8: For k from 0 to 1
9: by (30)
10: end for
11:
12: end for
13:
14: Break
15:
16: end if
17: For k from 0 to 1
18:
19: end for
20: end for
21:
22:
23:
24:
25: end if
26: |
After we obtain the detection results, = we can calculate the BER and the throughput, as in (20).
5. Simulation Results
In this section, theoretical and simulation results are provided to validate the feasibility of our proposed DPAm node structures and the performance of the proposed detection methods. We simulate a typical office environment using the baseband communication model analyzed above. The dual-polarized antenna of the backscatter node is as shown in
Figure 2, and the ambient RF source node operates at a center frequency of 2.4 GHz. As the default simulation settings, we consider the transmitted power of the ambient RF source with
15 dB. As the physical distance between the ambient RF source node and the reader node is much greater than the distance between the backscatter node and the reader node, we set
,
[
24,
26], with reflection coefficient
η = 0.5 and backscatter symbol data rate
Rb = 10
4. Without loss of generality, we assume that
αsr and
αsb are uniform distributions that vary independently in each coherent frame. We first consider an ideal situation
, which means that the polarization patterns of both the backscatter node and the reader node will receive approximately equal signal power, a common assumption in communications. In addition, we set the training sequence length to
T = 5 for the power average detector and
T = 1 for the K-means clustering detector. We set the data length in one frame to
L = 50 and the backscatter symbol-sampling rate to
N = 50. All simulation results are obtained by averaging 10
5 Monte Carlo realizations (i.e., AmBC frames).
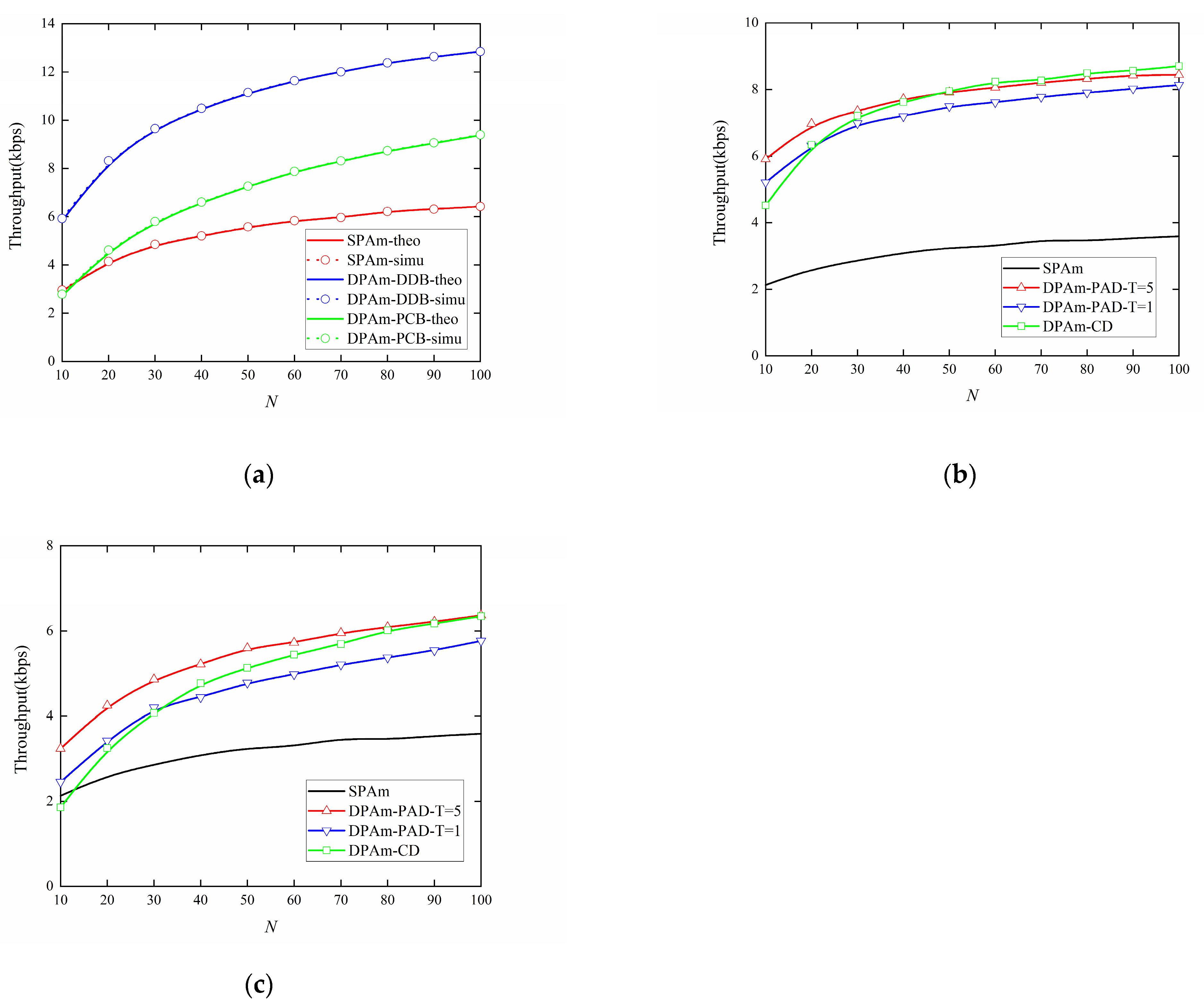
Figure 13a shows the impact of sampling rate
N on the throughput performance of the parallel backscatter mode in the DPAm system with different backscatter node structures and the SPAm system. As can be observed, our proposed DPAm nodes significantly improve the throughput compared to the SPAm system as
N increases. The DDB node structure can almost double the throughput compared to the SPAm system for each value of
N. However, the PCB node structure shows less improvement in throughput, with throughput almost equal to that of the SPAm at
N = 10, about 1.3 times better than that of the SPAm at
N = 50, and about 1.46 times better than that of the SPAm at
N = 100. The main reason for this phenomenon is that although the single-polarized input antenna and the Wilkinson power divider maintain fair power division between the backscatter signals on the two polarization patterns, they result in significant power loss for the backscatter signals. This power loss is also unfavorable for symbol detection and leads to a decrease in throughput performance. Moreover, the simulation results strongly corroborate the theoretical results.
Figure 13b,c also provide a comparative analysis of the impact of sampling rate
N on the throughput performance of the simultaneous backscatter mode in the DPAm system. The comparison includes different detectors, different backscatter node structures, and the SPAm system. As
N increases, both the node structure and the detector show better throughput performance. For each backscatter node structure, a significantly better throughput performance can be achieved by utilizing the power average detector with a longer training sequence. This improvement is caused by the fact that a longer training sequence will yield a more accurate average power estimation. It can also be readily observed that when the DDB node structure is utilized, the maximum throughput performance can be more than double the throughput performance of the SPAm system at the same sampling rate and about 2.42 times better than the throughput performance of the SPAm system at
N = 100. When the PCB node structure is utilized, it also achieves better throughput performance than the SPAm system in most cases; its maximum throughput performance is about 1.76 times better than the throughput performance of the SPAm system at
N = 100. These results validate that our proposed simultaneous backscatter mode is useful when the parameters are unknown. We also note that when
N < 30, the throughput performance of the clustering detector is inferior to that of the power average detector with
T = 1. This result suggests that the clustering detector requires more statistical received signal power to distinguish clearly among the received power sets. Conversely, when
N > 50, the clustering detector achieves throughput performance comparable to that of the power average detector with
T = 5. This feature is particularly beneficial for scenarios in which communication resources are limited so only a short training sequence is available. Moreover, when each backscatter node structure is utilized, the amplitude of the variation of the simultaneous backscatter mode from
N = 10 to
N = 100 is smaller than in the parallel backscatter mode. This result proves that the simultaneous backscatter mode with Manchester coding can improve the stability of DPAm system, which means that a lower
N will result in less reduction in throughput performance compared to the parallel backscatter mode and may save communication resources. As the simultaneous backscatter mode does not involve estimation of CSI, it yields lower absolute values for throughput performance than the parallel backscatter mode, but it is more practical.
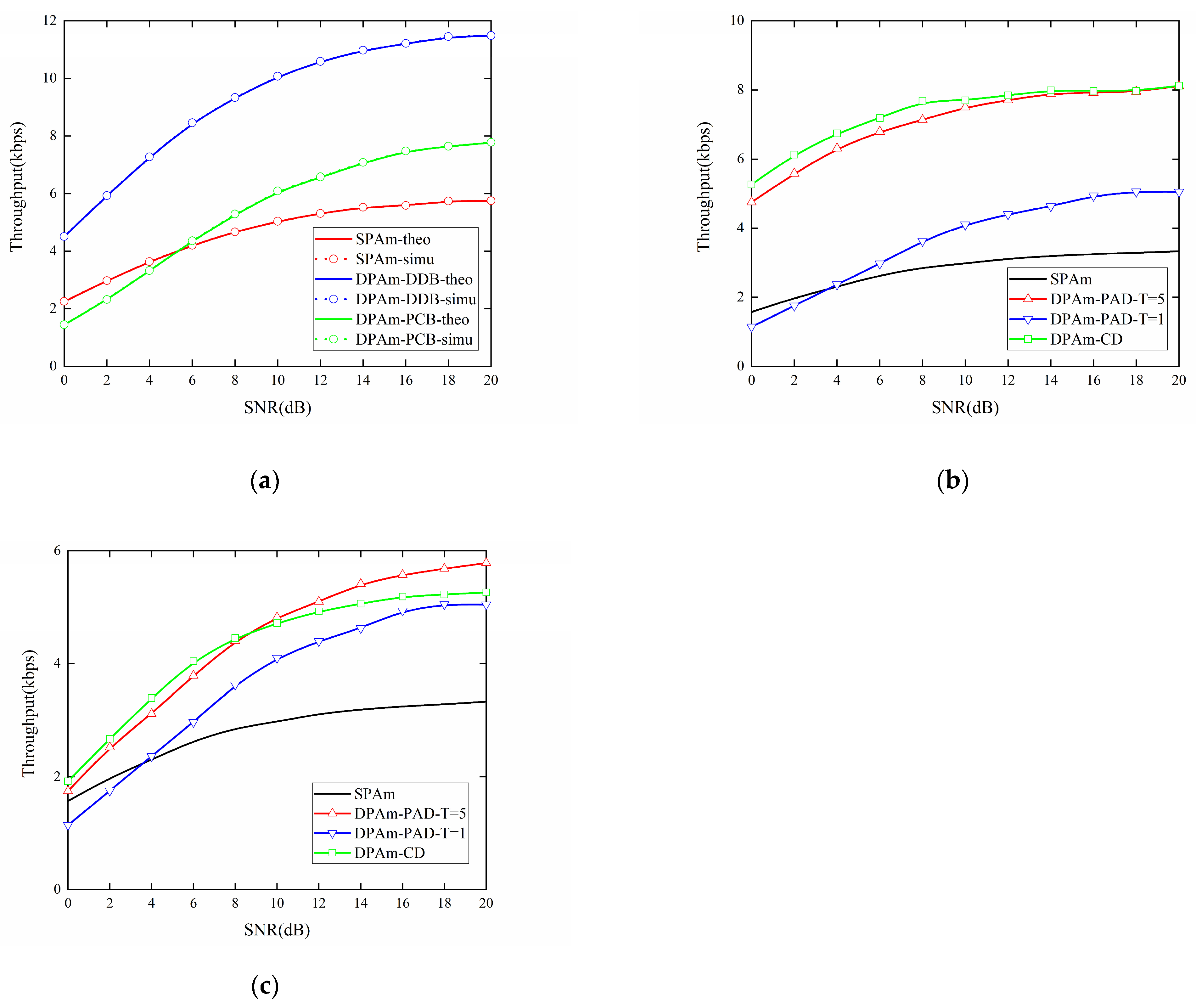
Figure 14a presents a comparison of the impact of SNR on the throughput performance of the parallel backscatter mode in the DPAm system with different backscatter node structures, and on the SPAm system. The DDB node structure can also almost double the throughput compared to the SPAm system for each SNR level, and the performance of the PCB node structure is about 1.35 times better than that of the SPAm at SNR = 20 dB. However, when SNR < 6 dB, the throughput performance of the PCB node structure is worse than that of the SPAm system. The simulation results are also strongly corroborated by the theoretical results.
Figure 14b,c also compare the impact of SNR on the throughput performance of the simultaneous backscatter mode in the DPAm system. The comparison includes different detectors and different backscatter node structures, as well as the SPAm system. When the DDB node structure is utilized, the maximum throughput performance can be more than double that of the SPAm system at the same SNR, which is about 2.43 times better than the throughput performance of the SPAm system at SNR = 20 dB. When the PCB node structure is utilized, it also achieves better throughput performance than SPAm system in most cases. Its maximum throughput performance is about 1.58 times better than that of the SPAm system at SNR = 20 dB. When utilizing the power average detector, the performance improvement from
T = 1 to
T = 5 for the DDB node structure is significantly larger than that for the PCB node structure. Moreover, when SNR < 4 dB, the throughput performance of the power average detector with
T = 1 is even lower than that of the SPAm system. For each backscatter node structure, when SNR < 10 dB, the clustering detector has the best throughput performance. For the DDB node structure, when SNR > 10 dB, the clustering detector has throughput performance similar to that of the power average detector with
T = 5. This result also demonstrates that the clustering detector is more flexible in low and high SNR conditions and across different backscatter node structures. Moreover, when each backscatter node structure is utilized, the amplitude of the variation in throughput performance in the simultaneous backscatter mode, from SNR = 0 dB to SNR = 20 dB, is less pronounced than in the parallel backscatter mode. This result also demonstrates that the simultaneous backscatter mode with Manchester coding could improve the stability of the DPAm system, which means that a lower SNR will result in a smaller reduction throughput performance compared to what is experienced in the parallel backscatter mode. Its performance may also suffer less in an environment with a variable SNR.
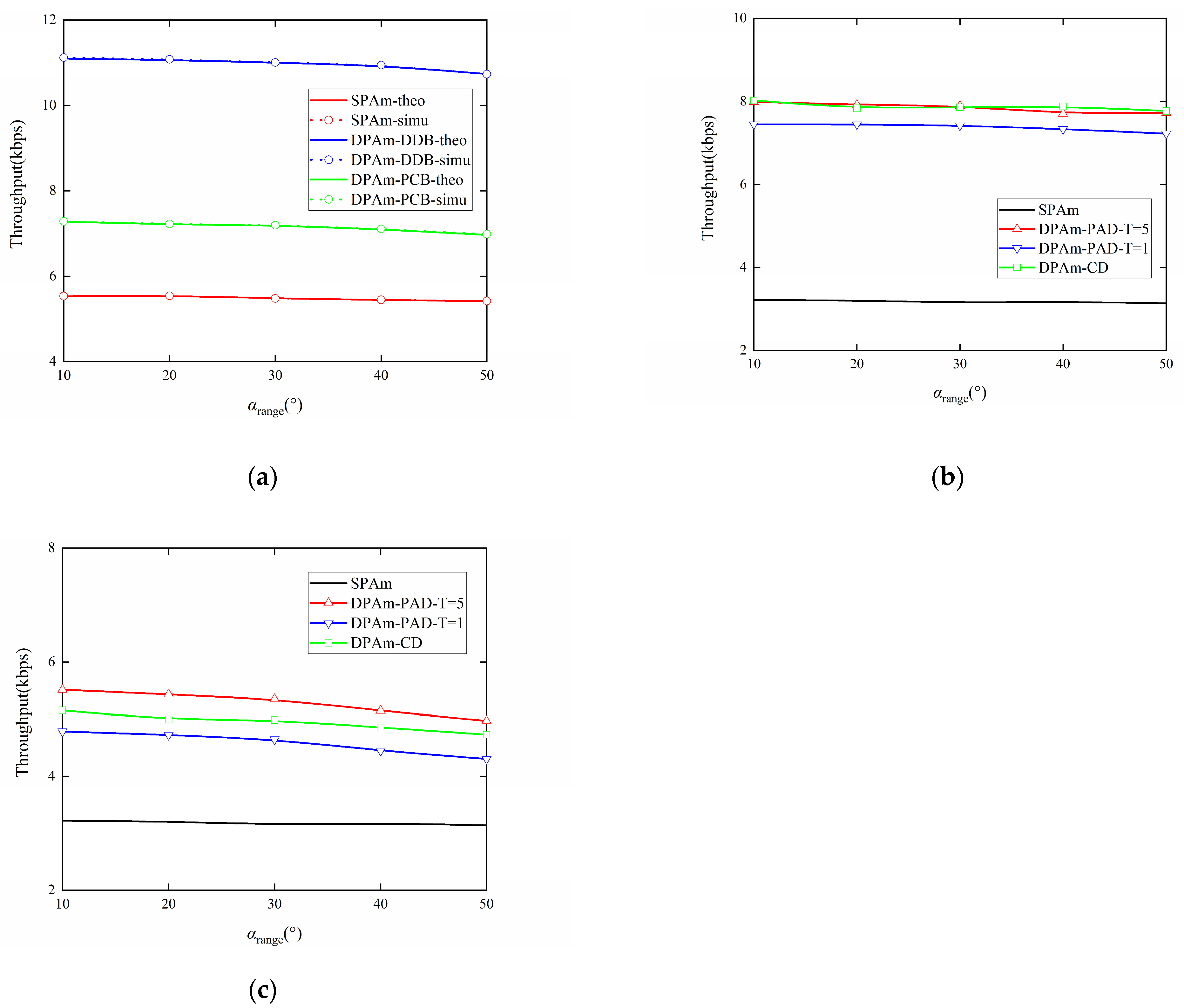
Figure 15a presents a comparison showing how the range of change in the included angle affects the throughput performance of the parallel backscatter mode in the DPAm system, considering different backscatter node structures, as well as the SPAm system.
Figure 15b,c also present a comparison of the impact of the range of change in the included angle on the throughput performance of the simultaneous backscatter mode in the DPAm system. This comparison also considers different detectors, different backscatter node structures, and the SPAm. To further explore the effect of the included angles in the DPAm system, we set the included angle to
. In the simulation settings, we fixed
αcenter = 45°, as in the default settings, and changed
αrange. All throughput performance decreases as
αrange increases, but the size of the decrease is small. This result indicates that the range of change in the included angles does not cause strong interference in AmBC systems. For the parallel backscatter mode, the DDB node structure can also double throughput compared to the SPAm system for each
αrange case, while the PCB node structure achieves throughput performance just about 1.3 times better than that of the SPAm for each
αrange case. For the simultaneous backscatter mode, when the DDB node structure is utilized, the maximum throughput performance is about 2.5 times better than that of the SPAm for each
αrange case, and the clustering detector has throughput performance similar to that of the power average detector with
T = 5. When the PCB node structure is utilized, the maximum throughput performance is about 1.6 times better than that of the SPAm for each
αrange case and the clustering detector still has better throughput performance than the power average detector with
T = 1. This result also demonstrates that the clustering detector has better self-adaptivity than the power average detector in complex
αrange cases given the same length of training sequence.
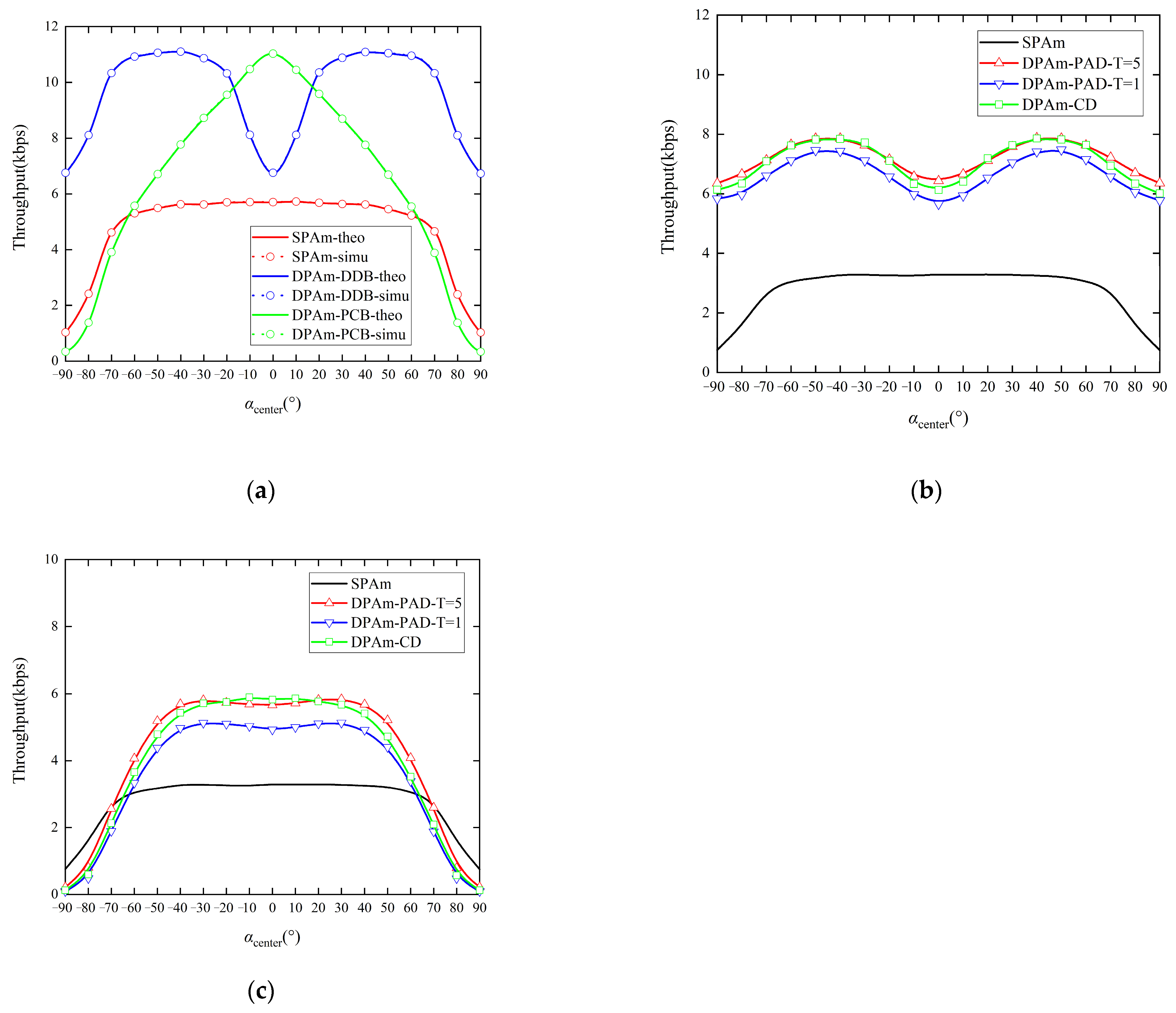
Figure 16a presents a comparison of the impact of the included angle center on the throughput performance of the parallel backscatter mode in the DPAm system. The comparison includes different backscatter node structures and the SPAm system.
Figure 16b,c also present a comparison of the impact of included angle center on the throughput performance of the simultaneous backscatter mode in the DPAm system with different detectors and different backscatter node structures, and this analysis also includes the SPAm. In this simulation, we fixed
αrange = 20° and increased
αcenter. Our two proposed DPAm node structures display notable differences in throughput performance depending on the center of the included angle. Specifically, the DDB node structure has better throughput performance when
αcenter is close to ±45°, while the PCB node structure has better throughput performance when
αcenter is close to 0°. This phenomenon can be intuitively understood considering that the PCB node structure depends mainly on the received power at the input antenna, when
αcenter are closer to 0°, the input antenna receives more power to backscatter symbols that is beneficial to demodulation. In contrast, the DDB node structure can utilize the received power on both polarization patterns simultaneously, so it is less sensitive to
αcenter than the PCB node structure. When
αcenter is close to ±45°, the two polarization patterns of the DDB node receive similar levels of signal power, enabling a more balanced backscatter of information and symbol detection and thus the best throughput performance. In addition, when the DDB node structure is utilized in each backscatter mode, the throughput performance is significantly better than that of the SPAm system, while when the PCB node structure is utilized in each backscatter mode, the throughput performance is better than that of the SPAm system only when
. When
αcenter is close to ±90°, the input antenna of the PCB node structure receives little power. This situation is unfavorable for backscatter symbols and leads to worse throughput performance. Moreover, the clustering detector for the simultaneous backscatter mode has throughput performance similar to that of the power average detector with
T = 5 when
αcenter is changing. Considering the real-world scenarios in which the included angles are difficult to measure, the robustness of the clustering detector is more relevant. It performs well with short training sequences and in complex cases involving changes in the included angles. We also note that the amplitude of the variation in the simultaneous backscatter mode from
αcenter = −90° to
αcenter = 90° is smaller than that observed in the parallel backscatter mode. This result also proves that use of the simultaneous backscatter mode with Manchester coding could improve the stability of the DPAm system, which means that a changing
αcenter will yield result in less pronounced deterioration in throughput performance than would occur in the parallel backscatter mode. Additionally, the simultaneous mode is better suited to handling complex environments in which the included angles are changing.
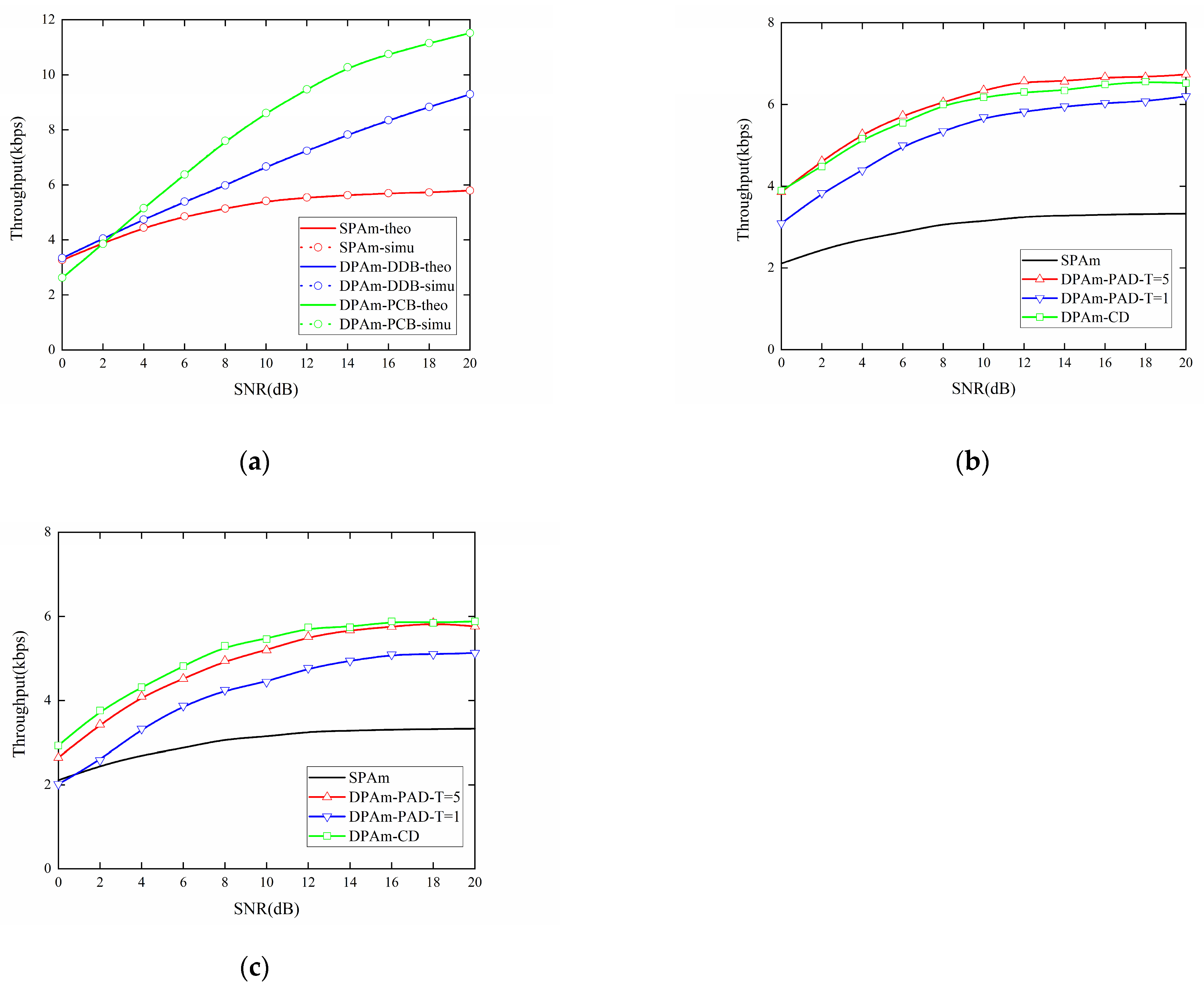
In addition, we consider a specific case with
, indicating that the polarization of the transmit antenna and the backscatter antenna and the reader antennas are well (but not perfect) aligned.
Figure 17a illustrates the throughput performance of the parallel backscatter mode in the DPAm system, comparing different backscatter node structures and the SPAm system, and
Figure 17b,c also illustrate the throughput performance of the simultaneous backscatter mode in the DPAm system. These figures include comparisons across various detectors and backscatter node structures, as well as the SPAm system. In the parallel backscatter mode alone, the PCB node structure has the best throughput performance at SNR > 4 dB. Under those conditions, the maximum throughput performance is about 1.98 times better than that of the the SPAm system at SNR = 20 dB, while in all other cases, the throughput performance of the PCB node structure is inferior to that of the DDB node structure. The main reason for this difference is analyzed above: although the single-polarized input antenna and the Wilkinson power divider maintain the fairness in distributing power between the two polarization patterns, they experience significant power loss for backscatter signals. In turn, this loss negatively affects symbol detection and reduces throughput performance. The input antenna can maximize the ambient RF signal power for backscatter only when the included angles are close to 0°. Although the PCB node structure is designed mainly to address the problem of the unknown arrival direction of the ambient RF signal, the PCB node structure still must be carefully designed to maintain the performance and integrity of backscatter.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}