


Fog Computing for Control of Cyber-Physical Systems in Industry Using BCI
 , ,
, ,  , and
, and
Abstract
:1. Introduction
- It is proposed a new scheme for decoding EEG for use in BCI of cyber-physical systems.
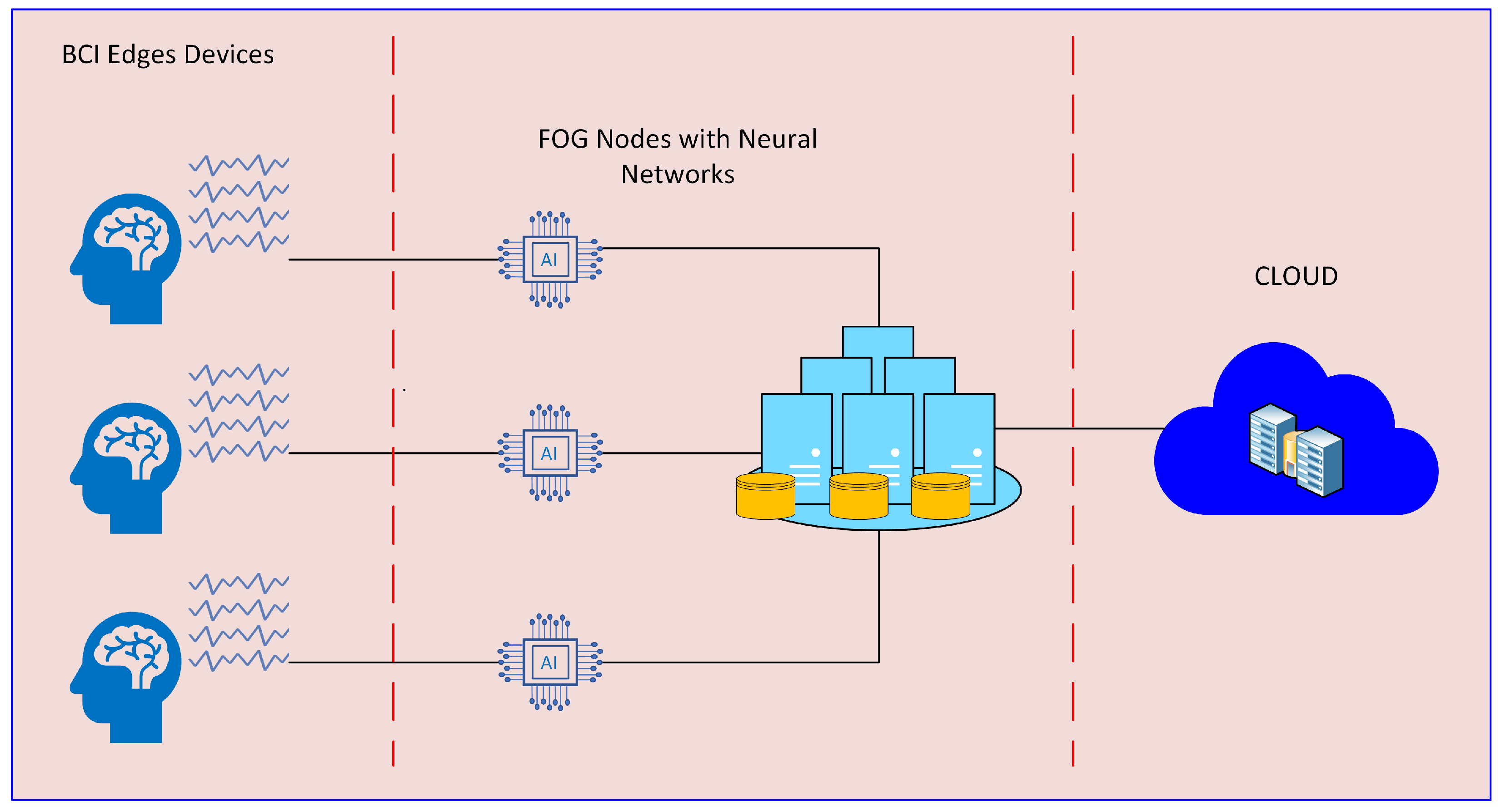
- A new fog computing architecture for working with BCI control is developed in a distributed environment.
2. Background
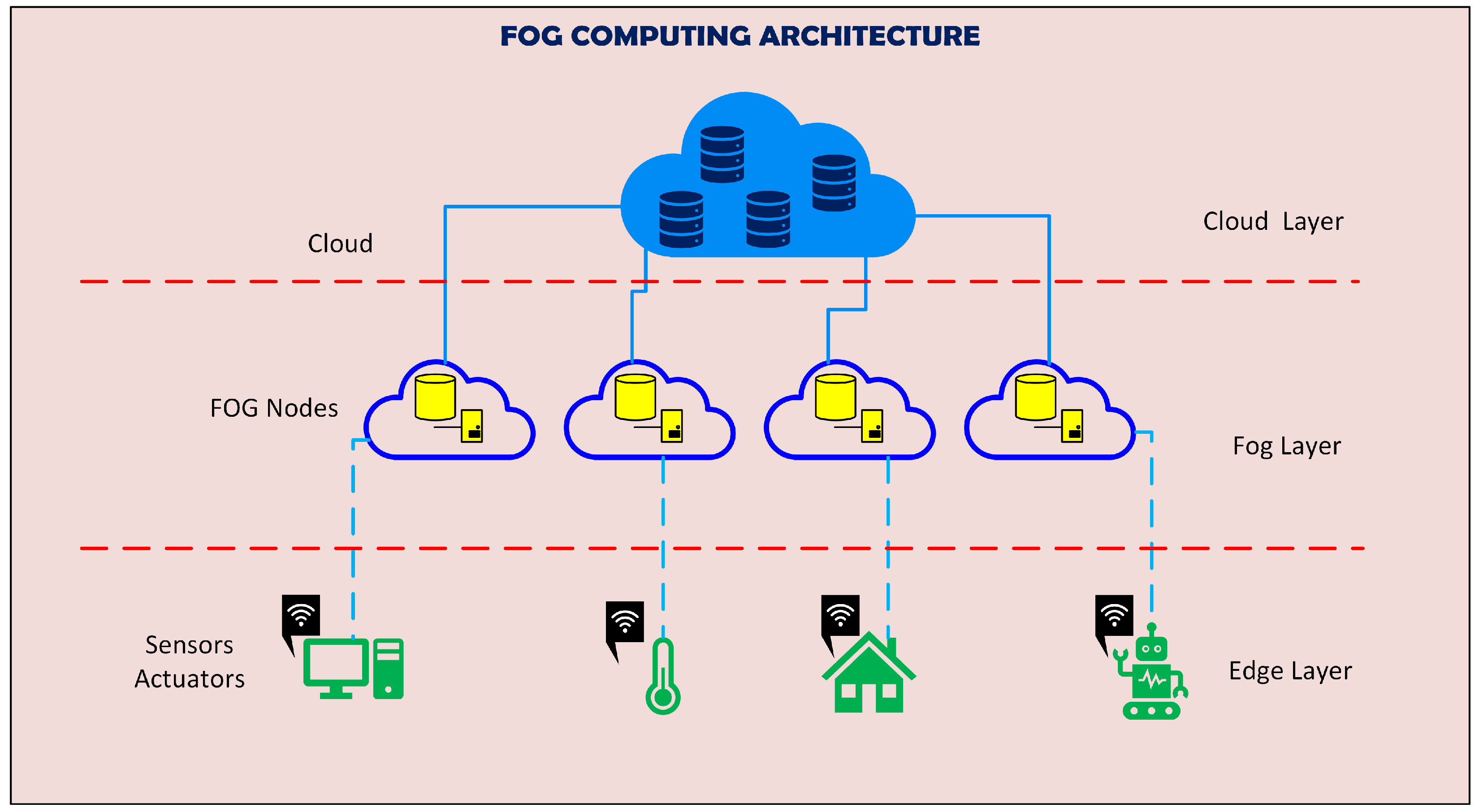
- Improves latency-sensitive applications: cloud server providers’ placement is generally far with respect to the edge devices which could cause latency problems for example in healthcare networks or vehicle networks. Fog nodes are typically placed close to IoT devices, helping to decrease latency.
- Increases cloud scalability problem: As the demand expands for cloud services, increases in cost and complexity may become unbearable. Fog computing helps in reducing computation resources diminishing the burden of cost-effective cloud resources.
- Save bandwidth: For example, with an increase in the demand for cloud services because of an excess of raw data for a wireless network, the spectrum could become a limited spectral resource when it is time to meet the requested service requirements [14]. However, if much of the raw data that arrive is processed by the fog nodes, only important, less dense information reaches the cloud instead of a large amount of raw data.
3. Materials and Methods
3.1. Fog Computing for BCI Based System
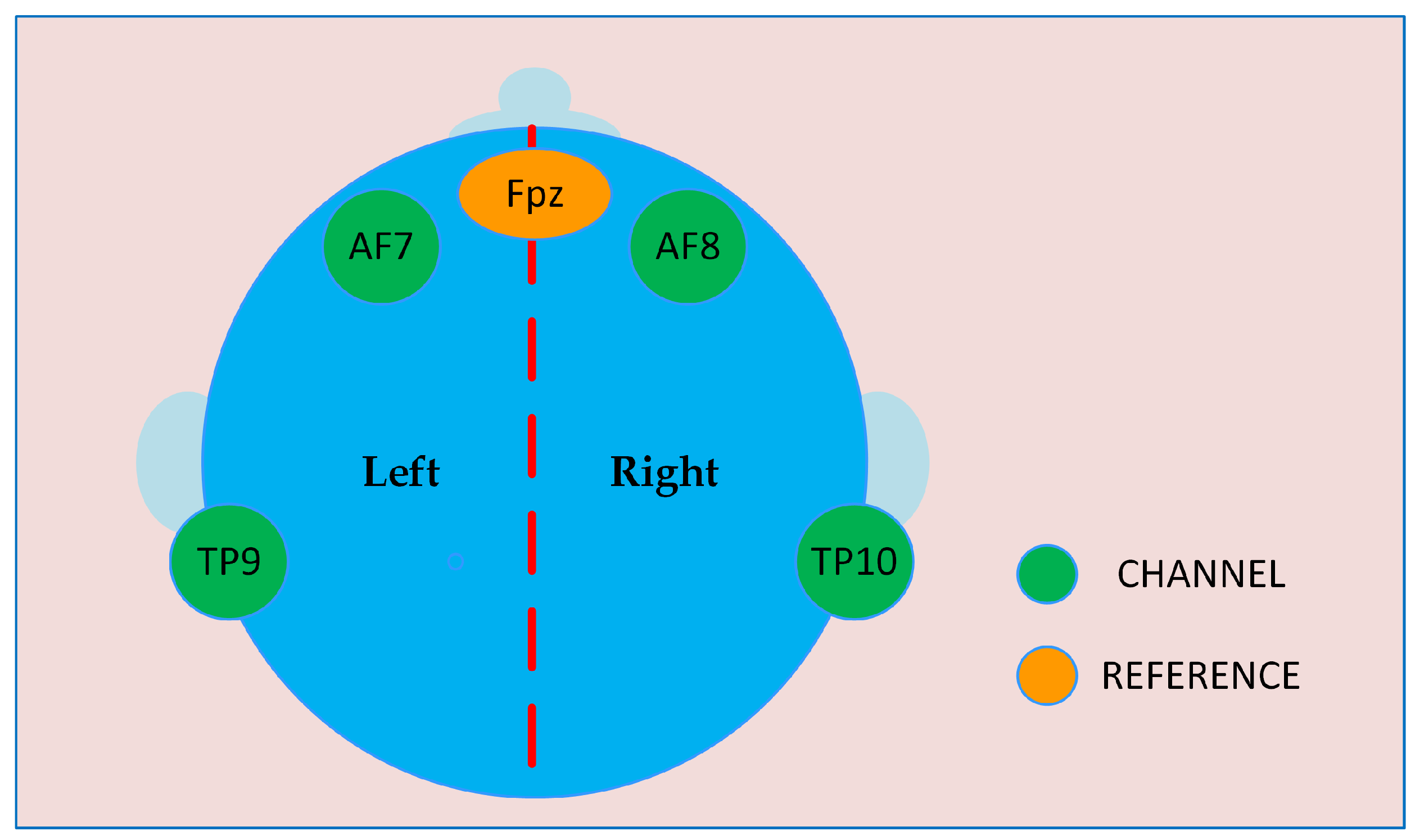
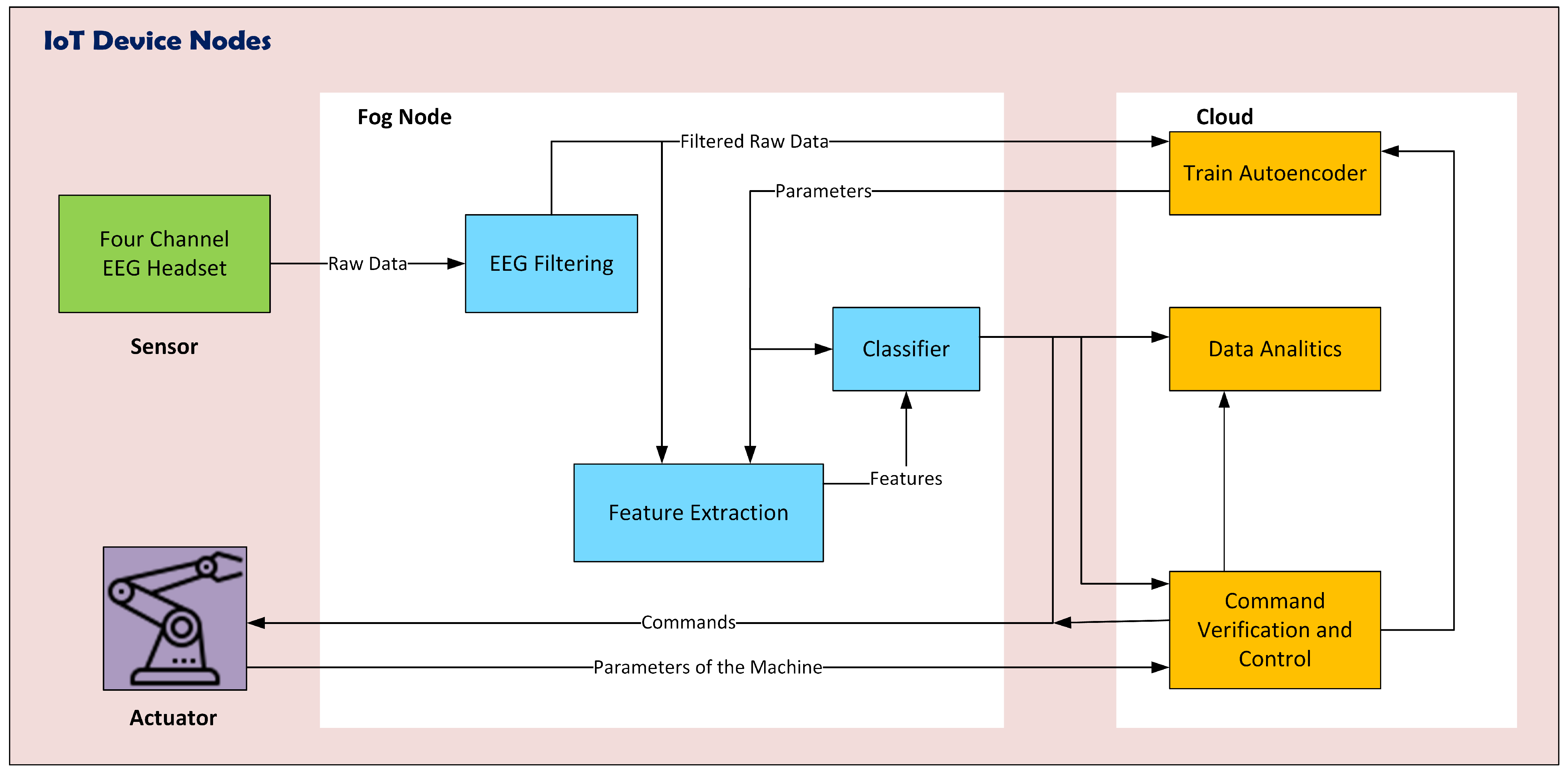
3.2. BCI System Architecture
| Algorithm 1 Classify signal |
| Input: EEG signal Output: C {class of the signal} {signal in latent space} {classification by RF} C |
3.3. Data Used to Train the Network
3.4. Fog Integration
3.4.1. Fog Nodes
3.4.2. Cloud
4. Results
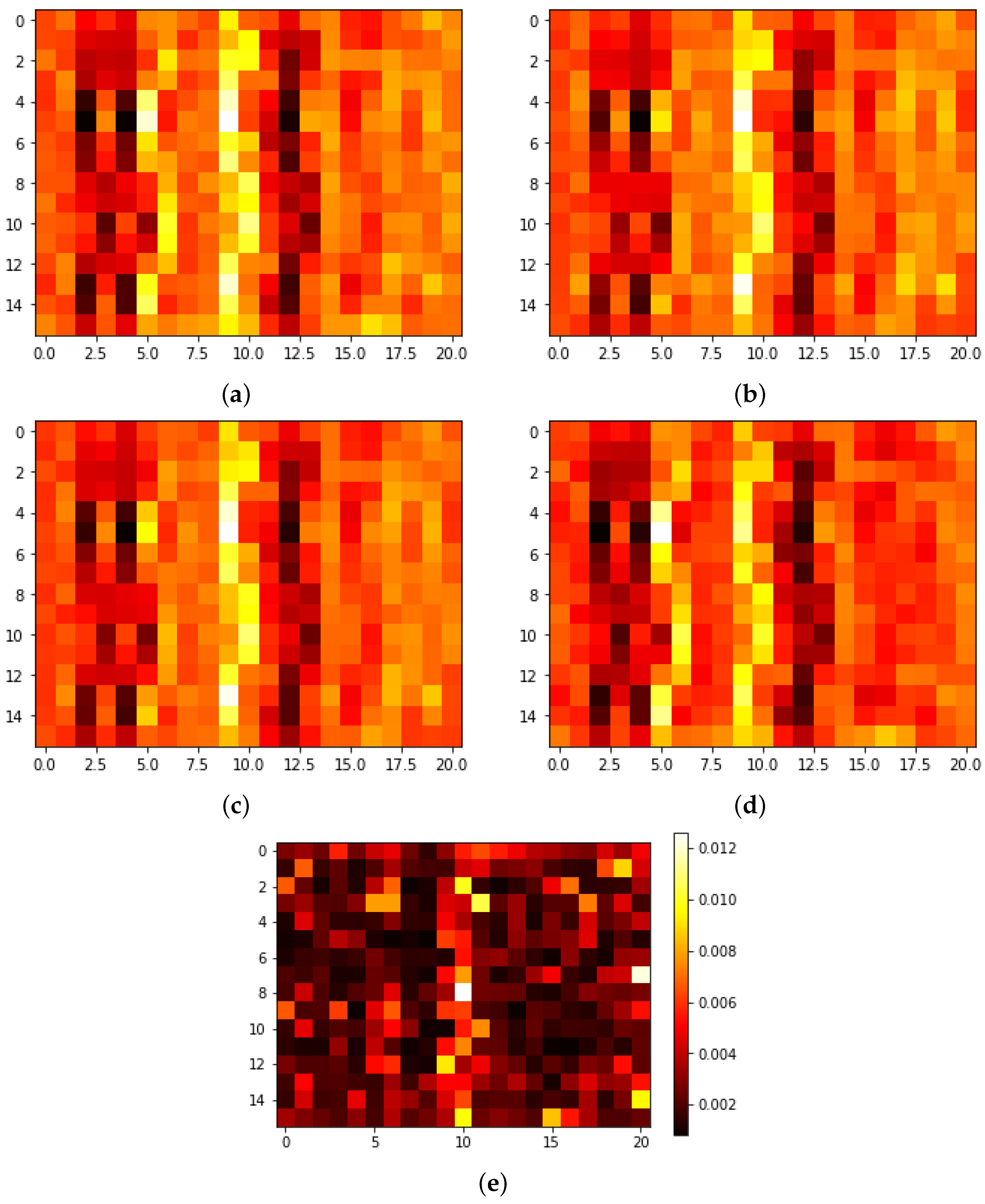
4.1. Encoder of EEG
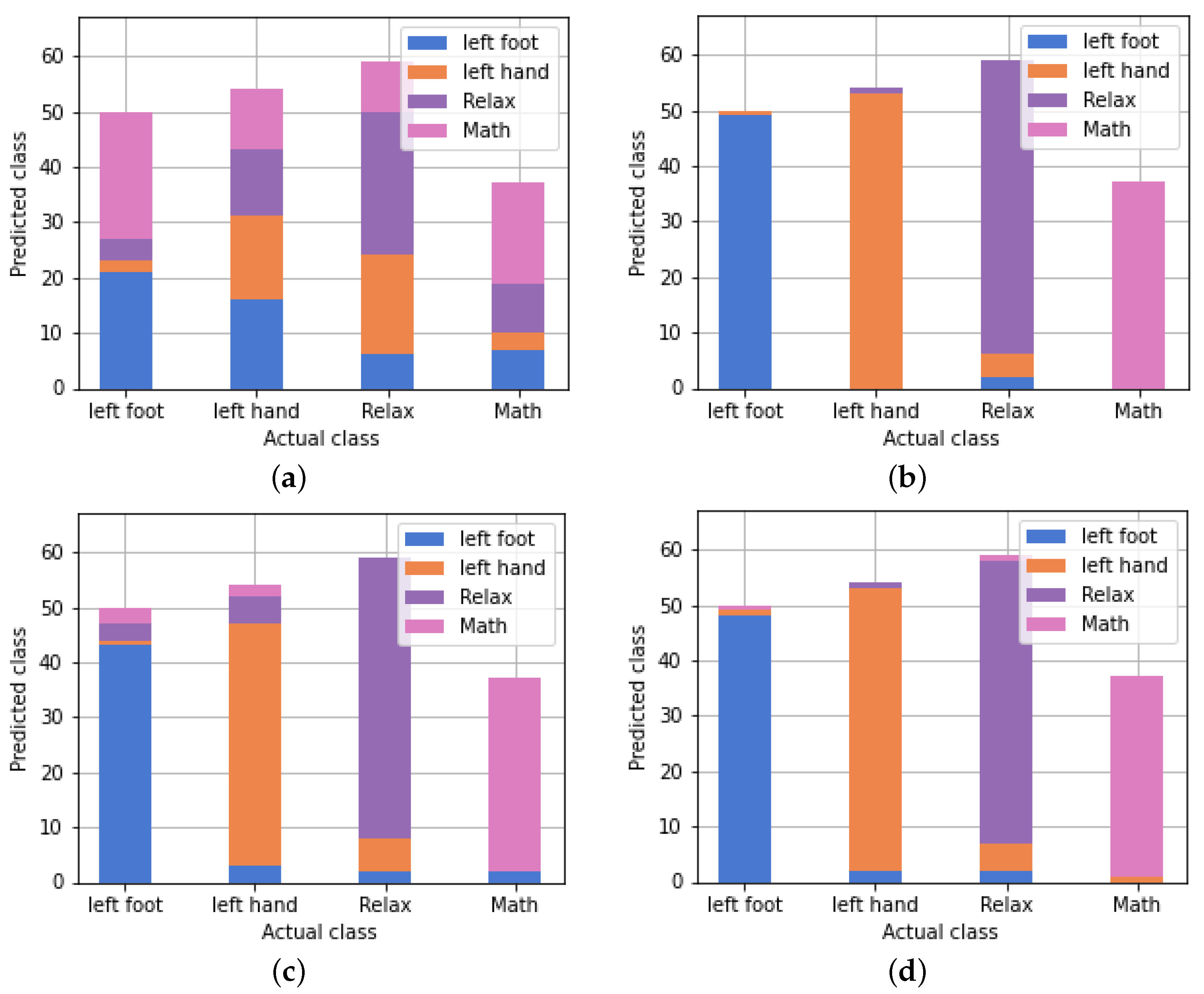
4.2. Classifier Performance
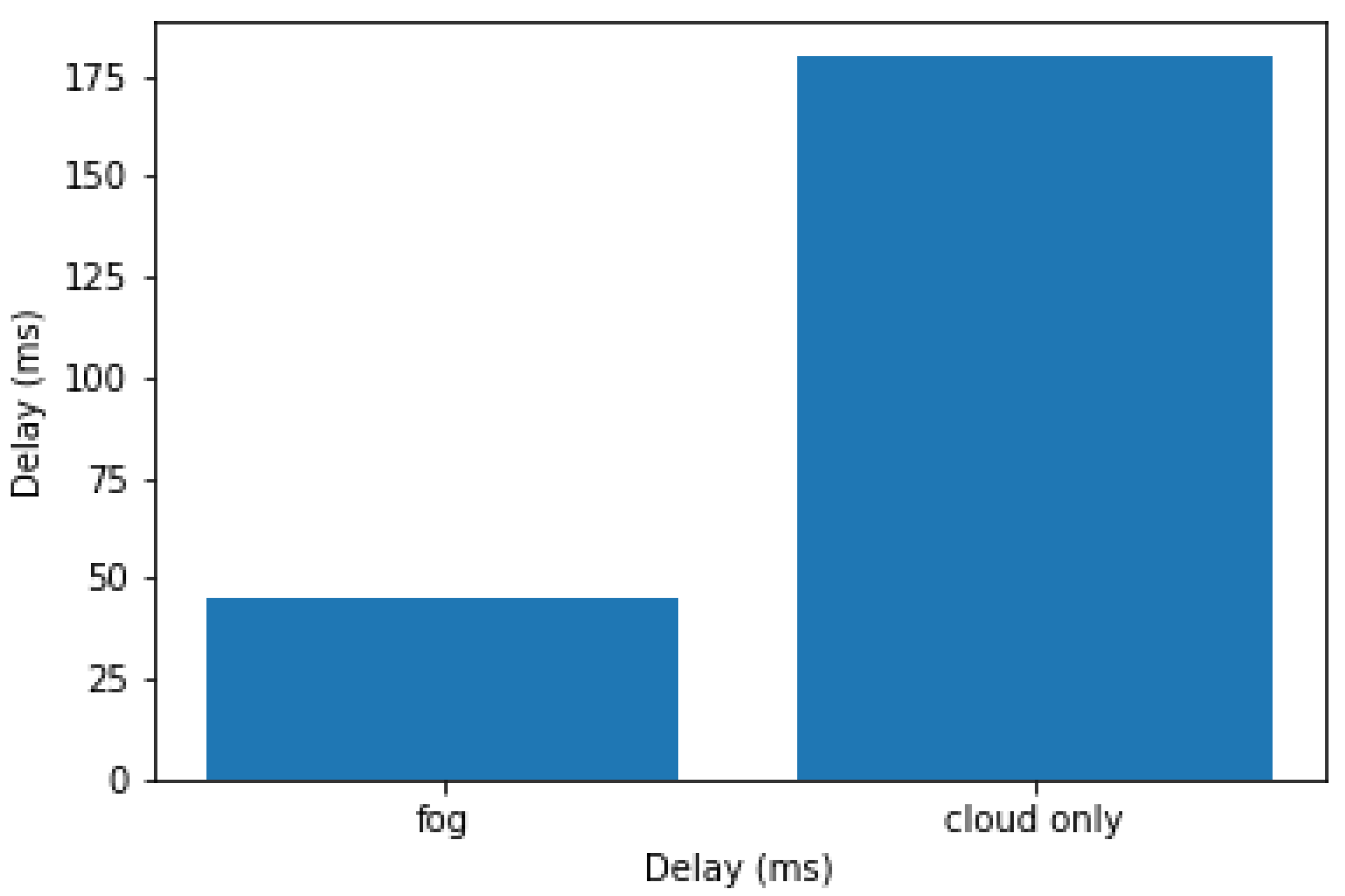
4.3. Fog Architecture Performance
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BCI | Brain computer interface |
| MI | Motor Imagery |
| EEG | Electroencephalogram |
| LF | Left foot |
| LH | Lesf hand |
| RX | Relaxation state |
| MA | Matemathical activity |
| RF | Random forest |
| DT | Desition tree |
| SVM | Support vector machine |
| GB | Gradient Boosting |
References
- Ilyas, M.; Saad, P.; Ahmad, M.; Ghani, A. Classification of eeg signals for brain-computer interface applications: Performance comparison. In Proceedings of the 2016 International Conference on Robotics, Automation and Sciences (ICORAS), Melaka, Malaysia, 5–6 November 2016; pp. 1–4. [Google Scholar]
- Miao, M.; Hu, W.; Yin, H.; Zhang, K. Spatial-frequency feature learning and classification of motor imagery eeg based on deep convolution neural network. Comput. Math. Methods Med. 2020, 2020, 1981728. [Google Scholar] [CrossRef] [PubMed]
- Maksimenko, V.A.; Kurkin, S.A.; Pitsik, E.N.; Musatov, V.Y.; Runnova, A.E.; Efremova, T.Y.; Hramov, A.E.; Pisarchik, A.N. Artificial neural network classification of motor-related eeg: An increase in classification accuracy by reducing signal complexity. Complexity 2018, 2018, 9385947. [Google Scholar] [CrossRef]
- Wang, L.; Liu, X.; Liang, Z.; Yang, Z.; Hu, X. Analysis and classification of hybrid bci based on motor imagery and speech imagery. Measurement 2019, 147, 106842. [Google Scholar] [CrossRef]
- Mattioli, F.; Porcaro, C.; Baldassarre, G. A 1D cnn for high accuracy classi-fication and transfer learning in motor imagery eeg-based brain-computer interface. J. Neural Eng. 2022, 18, 066053. [Google Scholar] [CrossRef] [PubMed]
- Douibi, K.; Bars, S.L.; Lemontey, A.; Nag, L.; Balp, R.; Breda, G. Toward eeg-based bci applications for industry 4.0: Challenges and possible applications. Front. Hum. Neurosci. 2021, 15, 705064. [Google Scholar] [CrossRef] [PubMed]
- Kumar, S.; Singh, S.K. Brain Computer Interaction (BCI): A Way to Interact with Brain Waves. 2021. Available online: https://insights2techinfo.com/brain-computer-interaction-bci-a-way-to-interact-with-brain-waves/ (accessed on 1 December 2023).
- Chari, A.; Budhdeo, S.; Sparks, R.; Barone, D.G.; Marcus, H.J.; Pereira, E.A.; Tisdall, M.M. Brain–machine interfaces: The role of the neurosurgeon. World Neurosurg. 2021, 146, 140–147. [Google Scholar] [CrossRef] [PubMed]
- Ortiz-Rosario, A.; Adeli, H. Brain-computer interface technologies: From signal to action. Rev. Neurosci. 2013, 24, 537–552. [Google Scholar] [CrossRef] [PubMed]
- Nunez, P.L.; Srinivasan, R. Electric Fields of the Brain: The Neuro-Physics of EEG; Oxford University Press: New York, NY, USA, 2006. [Google Scholar]
- Bellendorf, J.; Mann, Z.Á. Classification of optimization problems in fog computing. Future Gener. Comput. Syst. 2020, 107, 158–176. [Google Scholar] [CrossRef]
- Shi, Y.; Ding, G.; Wang, H.; Roman, H.E.; Lu, S. The fog computing service for healthcare. In Proceedings of the 2015 2nd International Symposium on Future Information and Communication Technologies for Ubiquitous HealthCare (UbiHealthTech), Beijing, China, 28–30 May 2015; pp. 1–5. [Google Scholar]
- Hu, P.; Dhelim, S.; Ning, H.; Qiu, T. Survey on fog computing: Architecture, key technologies, applications and open issues. J. Netw. Comput. Appl. 2017, 98, 27–42. [Google Scholar] [CrossRef]
- Xu, T.; Darwazeh, I. Non-orthogonal narrowband internet of things: A design for saving bandwidth and doubling the number of connected devices. IEEE Internet Things J. 2018, 5, 2120–2129. [Google Scholar] [CrossRef]
- Gallego, J.A.; Makin, T.R.; McDougle, S.D. Going beyond primary motor cortex to improve brain–computer interfaces. Trends Neurosci. 2022, 45, 176–183. [Google Scholar] [CrossRef] [PubMed]
- Mulert, C. Simultaneous eeg and fmri: Towards the characterization of structure and dynamics of brain networks. Dialogues Clin.-Neuro-Sci. 2022, 15, 381–386. [Google Scholar] [CrossRef] [PubMed]
- Gajewski, P.D.; Getzmann, S.; Bröde, P.; Burke, M.; Cadenas, C.; Capellino, S.; Claus, M.; Genç, E.; Golka, K.; Hengstler, J.G.; et al. Impact of biological and lifestyle factors on cognitive aging and work ability in the dortmund vital study: Protocol of an interdisciplinary, cross-sectional, and380 longitudinal study. JMIR Res. Protoc. 2022, 11, e32352. [Google Scholar] [CrossRef] [PubMed]
- Persiani, S.G.; Kobas, B.; Koth, S.C.; Auer, T. Biometric data as real-time measure of physiological reactions to environmental stimuli in the built environment. Energies 2021, 14, 232. [Google Scholar] [CrossRef]
- Keiper, A. The age of neuroelectronics. In Nanotechnology, the Brain, and the Future; Springer: Dordrecht, The Netherlands, 2013; pp. 115–146. [Google Scholar]
- Yang, J.-Q.; Wang, R.; Ren, Y.; Mao, J.-Y.; Wang, Z.-P.; Zhou, Y.; Han, S.-T. Neuromorphic engineering: From biological to spike-based hardware nervous systems. Adv. Mater. 2020, 32, 2003610. [Google Scholar] [CrossRef] [PubMed]
- Kam, J.W.; Griffin, S.; Shen, A.; Patel, S.; Hinrichs, H.; Heinze, H.-J.; Deouell, L.Y.; Knight, R.T. Systematic comparison between a wireless eeg system with dry electrodes and a wired eeg system with wet electrodes. NeuroImage 2019, 184, 119–129. [Google Scholar] [CrossRef] [PubMed]
- Liegel, N.; Schneider, D.; Wascher, E.; Arnau, S. Task prioritization modulates alpha, theta and beta eeg dynamics reflecting proactive cognitive control. Sci. Rep. 2022, 12, 15072. [Google Scholar] [CrossRef]
- Guttmann-Flury, E.; Sheng, X.; Zhu, X. Channel selection from source localization: A review of four eeg-based brain–computer interfaces paradigms. Behav. Res. Methods 2022, 55, 1980–2003. [Google Scholar] [CrossRef]
- Rimbert, S.; Lotte, F. Erd modulations during motor imageries relate to users traits and bci performances. In Proceedings of the 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Glasgow, UK, 11–15 July 2022; pp. 203–207. [Google Scholar]
- Chholak, P.; Niso, G.; Maksimenko, V.A.; Kurkin, S.A.; Frolov, N.S.; Pitsik, E.N.; Hramov, A.E.; Pisarchik, A.N. Visual and kinesthetic modes affect motor imagery classification in untrained subjects. Sci. Rep. 2019, 9, 9838. [Google Scholar] [CrossRef]
- Gaur, P.; McCreadie, K.; Pachori, R.B.; Wang, H.; Prasad, G. An automatic subject specific channel selection method for enhancing motor imagery classification in eeg-bci using correlation. Biomed. Signal Process. Control 2021, 68, 102574. [Google Scholar] [CrossRef]
- Chai, R.; Ling, S.H.; Hunter, G.P.; Nguyen, H.T. Mental task classifications using prefrontal cortex electroencephalograph signals. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 1831–1834. [Google Scholar]
- Gualsaquí, M.G.; Delgado, A.S.; González, L.L.; Vaca, G.F.; Galárraga, D.A.A.; Salum, G.M.; Cadena-Morejón, C.; Tirado-Espín, A.; Villalba-Meneses, F. Convolutional neural network for imagine movement classification for neurorehabilitation of upper extremities using low-frequency eeg signals for spinal cord injury. In Proceedings of the Smart Technologies, Systems and Applications, Second International Conference, SmartTech-IC 2021, Quito, Ecuador, 1–3 December 2021; Revised Selected Papers. Springer: Berlin/Heidelberg, Germany, 2022; pp. 272–287. [Google Scholar]
- Eden, J.; Bräcklein, M.; Ibáñez, J.; Barsakcioglu, D.Y.; Pino, G.D.; Farina, D.; Burdet, E.; Mehring, C. Principles of human movement augmentation and the challenges in making it a reality. Nat. Commun. 2022, 13, 1345. [Google Scholar] [CrossRef] [PubMed]
- Antipov, V. Upper limb exoskeleton for neurorehabilitation with control via brain-computer interface. In Proceedings of the 2022 6th Scientific School Dynamics of Complex Networks and their Applications (DCNA), Kaliningrad, Russia, 14–16 September 2022; pp. 21–23. [Google Scholar]
- Zhang, Z.; Han, S.; Yi, H.; Duan, F.; Kang, F.; Sun, Z.; Solé-Casals, J.; Caiafa, C.F. A brain-controlled vehicle system based on steady state visual evoked potentials. Cogn. Comput. 2022, 15, 159–175. [Google Scholar] [CrossRef]
- Abdulwahhab, A.H.; Myderrizi, I.; Mahmood, M.K. Drone movement control by electroencephalography signals based on bci system. Adv. Electr. Electron. Eng. 2022, 20, 216–224. [Google Scholar] [CrossRef]
- Kohli, V.; Tripathi, U.; Chamola, V.; Rout, B.K.; Kanhere, S.S. A review on virtual reality and augmented reality use-cases of brain computer interface based applications for smart cities. Microprocess. Microsystems 2022, 88, 104392. [Google Scholar] [CrossRef]
- Tiwari, A.; Chaturvedi, A. Automatic eeg channel selection for multiclass brain-computer interface classification using multiobjective improved firefly algorithm. Multimed. Tools Appl. 2022, 82, 5405–5433. [Google Scholar] [CrossRef]
- Geng, X.; Li, D.; Chen, H.; Yu, P.; Yan, H.; Yue, M. An improved feature extraction algorithms of eeg signals based on motor imagery brain-computer interface. Alex. Eng. J. 2022, 61, 4807–4820. [Google Scholar] [CrossRef]
- Zou, Y.; Zhao, X.; Chu, Y.; Xu, W.; Han, J.; Li, W. A supervised independent component analysis algorithm for motion imagery-based brain computer interface. Biomed. Signal Process. Control 2022, 75, 103576. [Google Scholar] [CrossRef]
- Ouyang, R.; Jin, Z.; Tang, S.; Fan, C.; Wu, X. Low-quality training data detection method of eeg signals for motor imagery bci system. J. Neurosci. Methods 2022, 376, 109607. [Google Scholar] [CrossRef]
- Hu, H.; Pu, Z.; Li, H.; Liu, Z.; Wang, P. Learning optimal time-frequency-spatial features by the cissa-csp method for motor imagery eeg classification. Sensors 2022, 22, 8526. [Google Scholar] [CrossRef]
- Maswanganyi, R.C.; Tu, C.; Owolawi, P.A.; Du, S. Statistical evaluation of factors influencing inter-session and inter-subject variability in eeg-based brain computer interface. IEEE Access 2022, 10, 96821–96839. [Google Scholar] [CrossRef]
- Lin, C.-F.; Lin, H.-C. Imf-based mf and hs energy feature information of f5, and f6 movement and motor imagery eeg signals in delta rhythms using hht. Sensors 2023, 23, 1078. [Google Scholar] [CrossRef] [PubMed]
- Lin, R.; Dong, C.; Ma, P.; Ma, S.; Chen, X.; Liu, H. A fused multidimensional eeg classification method based on an extreme tree feature selection. Comput. Intell. Neurosci. 2022, 2022, 7609196. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Deng, Y.; Yan, F.; Guan, Z.; Peng, F. An improved schema of brain-computer interface based on motor imagery with eye movement. J. Phys. Conf. Ser. 2022, 2219, 012057. [Google Scholar] [CrossRef]
- Altaheri, H.; Muhammad, G.; Alsulaiman, M.; Amin, S.U.; Altuwaijri, G.A.; Abdul, W.; Bencherif, M.A.; Faisal, M. Deep learning techniques for classification of electroencephalogram (eeg) motor imagery (mi) signals: A review. Neural Comput. Appl. 2021, 35, 14681–14722. [Google Scholar] [CrossRef]
- Zhang, R.; Xiao, X.; Liu, Z.; Jiang, W.; Li, J.; Cao, Y.; Ren, J.; Jiang, D.; Cui, L. A new motor imagery eeg classification method fb-trcsp+ rf based on csp and random forest. IEEE Access 2018, 6, 44944–44950. [Google Scholar] [CrossRef]
- Guan, S.; Zhao, K.; Yang, S. Motor imagery eeg classification based on decision tree framework and riemannian geometry. Comput. Intell. Neurosci. 2019, 2019, 5627156. [Google Scholar] [CrossRef] [PubMed]
- Santos, E.M.D.; San-Martin, R.; Fraga, F.J. Comparison of subject independent and subject-specific eeg-based bci using lda and svm classifiers. Med. Biol. Eng. Comput. 2023, 61, 835–845. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Ding, M.; Zhang, R.; Xiu, C. Motor imagery eeg classification algorithm based on cnn-lstm feature fusion network. Biomed. Signal Process. Control 2022, 72, 103342. [Google Scholar] [CrossRef]
- Khademi, Z.; Ebrahimi, F.; Kordy, H.M. A transfer learning-based cnn and lstm hybrid deep learning model to classify motor imagery eeg signals. Comput. Biol. Med. 2022, 143, 105288. [Google Scholar] [CrossRef]
- Naz, M.; Shah, J.H.; Khan, M.A.; Sharif, M.; Raza, M.; Damaševičius, R. From ecg signals to images: A transformation based approach for deep learning. PeerJ Comput. Sci. 2021, 7, e386. [Google Scholar] [CrossRef]
- Huang, T.; Chakraborty, P.; Sharma, A. Deep convolutional generative adversarial networks for traffic data imputation encoding time series as images. Int. J. Transp. Sci. Technol. 2021, 12, 1–18. [Google Scholar] [CrossRef]
- Rodriguez, P.I.; Mejia, J.; Mederos, B.; Moreno, N.E.; Mendoza, V.M. Acquisition, Analysis and Classification of EEG Signals for Control Design. In Proceedings of the RCCS+SPIDTEC2. 2018. Available online: https://ceur-ws.org/Vol-2304/ (accessed on 1 December 2023).
- Gupta, H.; Dastjerdi, A.V.; Ghosh, S.K.; Buyya, R. iFogSim: A toolkit for modeling and simulation of resource management techniques in the internet of things, edge and fog computing environments. Softw. Pract. Exp. 2017, 47, 1275–1296. [Google Scholar] [CrossRef]
- Louppe, G.; Wehenkel, L.; Sutera, A.; Geurts, P. Understanding variable importances in forests of randomized trees. Adv. Neural Inf. Process. Syst. 2013, 26. Available online: https://proceedings.neurips.cc/paper_files/paper/2013/hash/e3796ae838835da0b6f6ea37bcf8bcb7-Abstract.html (accessed on 1 December 2023).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Ostrow, L.; Nemec, P.B.; Smith, C. Self-employment for people with psychiatric disabilities: Advantages and strategies. J. Behav. Health Serv. Res. 2019, 46, 686–696. [Google Scholar] [CrossRef]
- Lera, I.; Guerrero, C.; Juiz, C. YAFS: A simulator for iot scenarios in fog computing. IEEE Access 2019, 7, 91745–91758. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Precision | Recall | f1-Score | Accuracy | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| LF | LH | RX | MA | LF | LH | RX | MA | LF | LH | RX | MA | ||
| SVM | 0.42 | 0.39 | 0.51 | 0.30 | 0.42 | 0.28 | 0.44 | 0.49 | 0.42 | 0.33 | 0.47 | 0.37 | 0.40 |
| RF | 0.96 | 0.91 | 0.98 | 1.00 | 0.98 | 0.98 | 0.90 | 1.00 | 0.97 | 0.95 | 0.94 | 1.00 | 0.96 |
| DT | 0.88 | 0.81 | 0.91 | 0.82 | 0.88 | 0.81 | 0.86 | 0.89 | 0.88 | 0.81 | 0.89 | 0.86 | 0.86 |
| GB | 0.92 | 0.88 | 0.98 | 0.95 | 0.96 | 0.94 | 0.86 | 0.97 | 0.94 | 0.91 | 0.92 | 0.96 | 0.93 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Azar, P.I.; Mejía-Muñoz, J.M.; Cruz-Mejía, O.; Torres-Escobar, R.; López, L.V.R. Fog Computing for Control of Cyber-Physical Systems in Industry Using BCI. Sensors 2024, 24, 149. https://doi.org/10.3390/s24010149
Rodríguez-Azar PI, Mejía-Muñoz JM, Cruz-Mejía O, Torres-Escobar R, López LVR. Fog Computing for Control of Cyber-Physical Systems in Industry Using BCI. Sensors. 2024; 24(1):149. https://doi.org/10.3390/s24010149
Chicago/Turabian StyleRodríguez-Azar, Paula Ivone, Jose Manuel Mejía-Muñoz, Oliverio Cruz-Mejía, Rafael Torres-Escobar, and Lucero Verónica Ruelas López. 2024. "Fog Computing for Control of Cyber-Physical Systems in Industry Using BCI" Sensors 24, no. 1: 149. https://doi.org/10.3390/s24010149
APA StyleRodríguez-Azar, P. I., Mejía-Muñoz, J. M., Cruz-Mejía, O., Torres-Escobar, R., & López, L. V. R. (2024). Fog Computing for Control of Cyber-Physical Systems in Industry Using BCI. Sensors, 24(1), 149. https://doi.org/10.3390/s24010149