

Slip Detection Strategies for Automatic Grasping in Prosthetic Hands

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Slip Detection in Human Grasping
2. Prosthetic Gripping
Slip Detection and Reaction
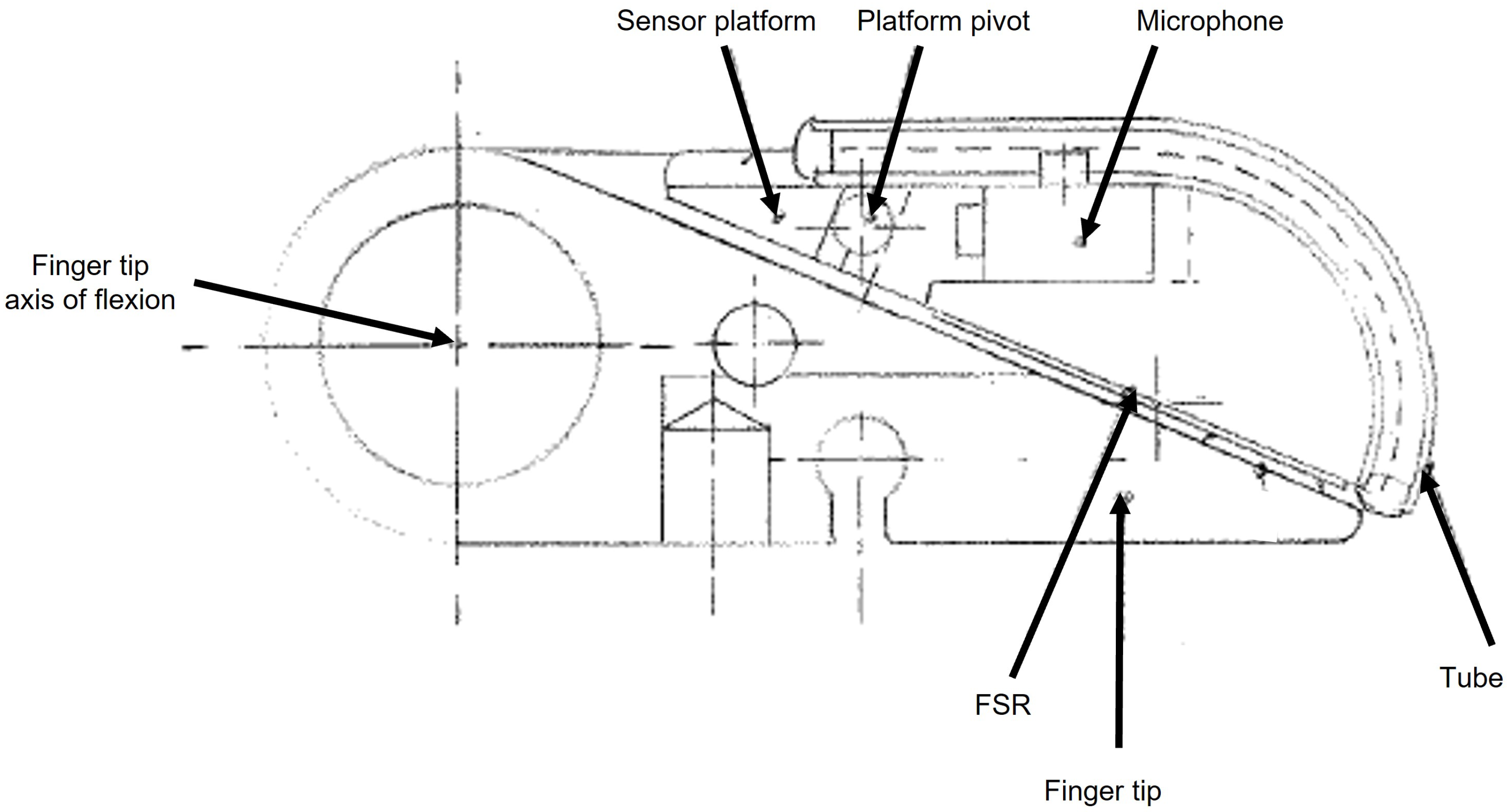
3. The Southampton Hand
Slip Detection in the Southampton Hand
4. Friction-Generated Slip Sounds
Vibrations from Frictional Contact
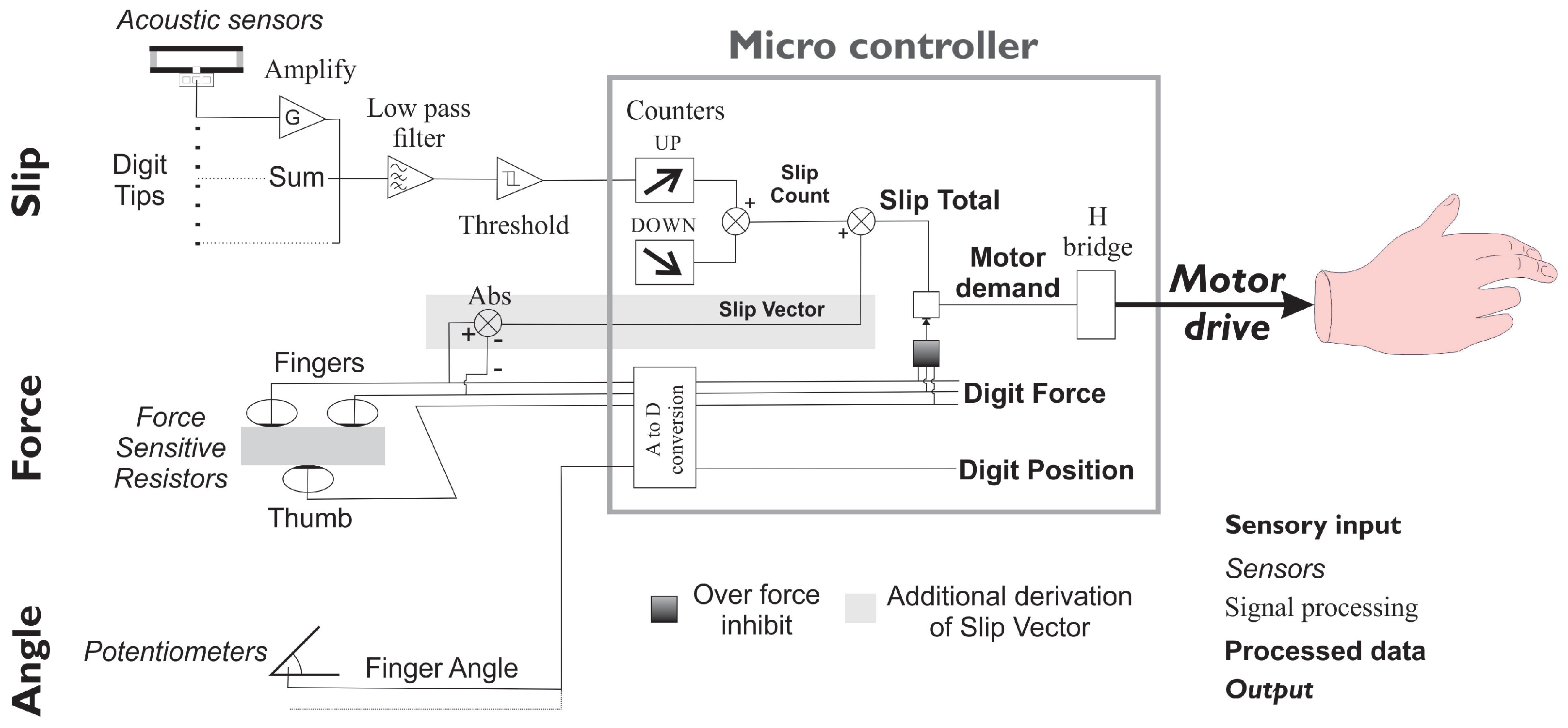
5. Detection Methods
Pulse Counting
6. Hand Response
7. Materials and Methods
8. Method
9. Results
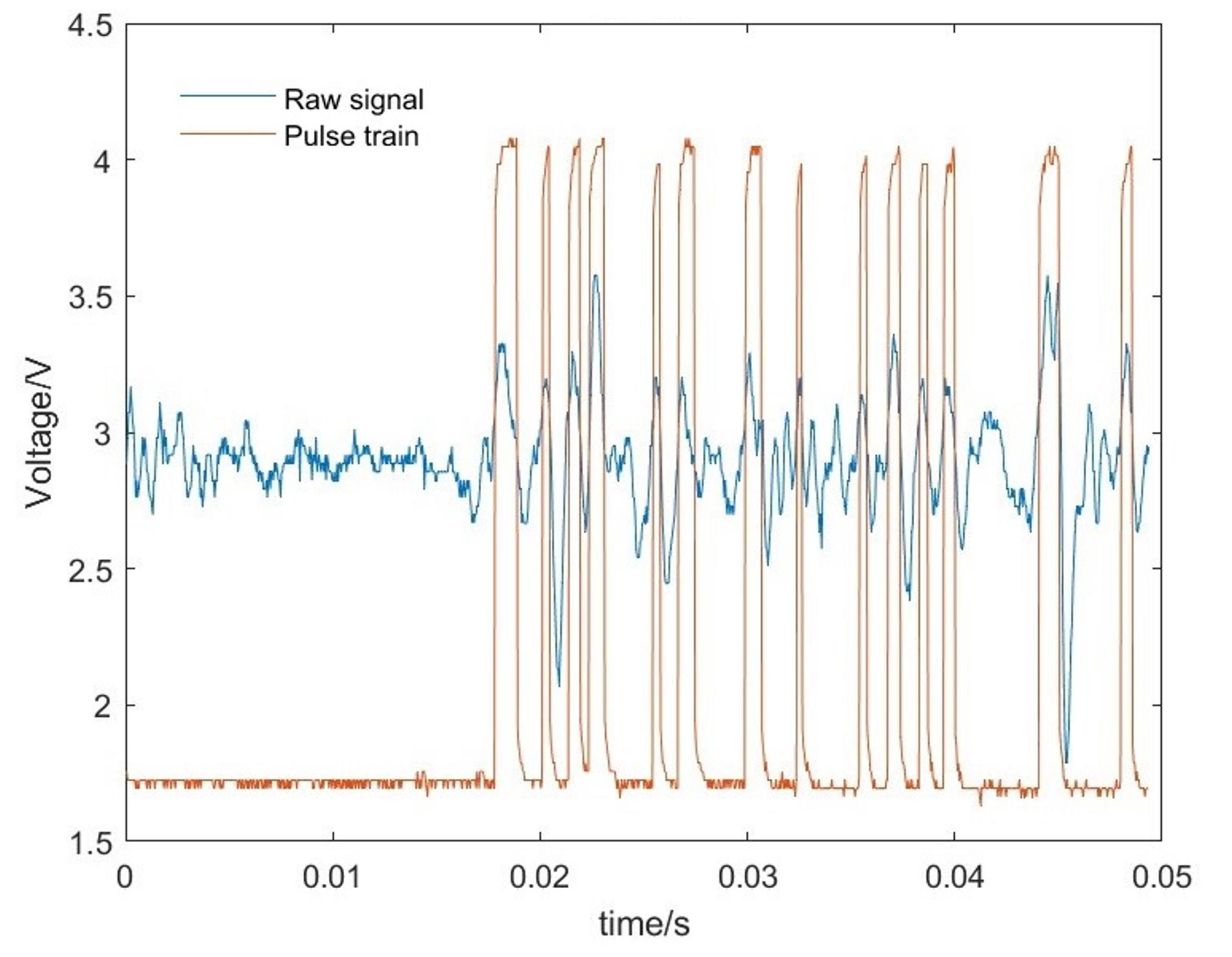
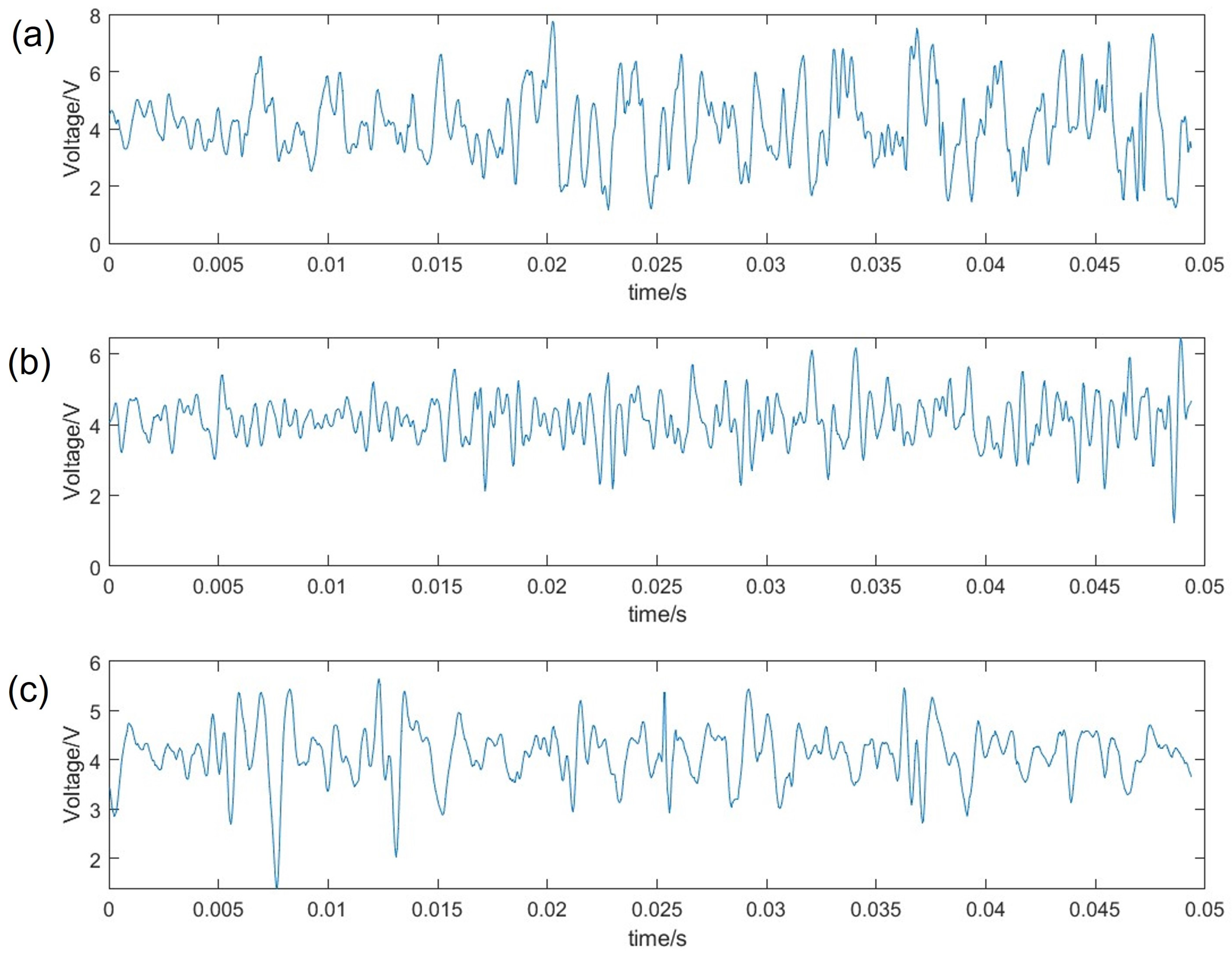
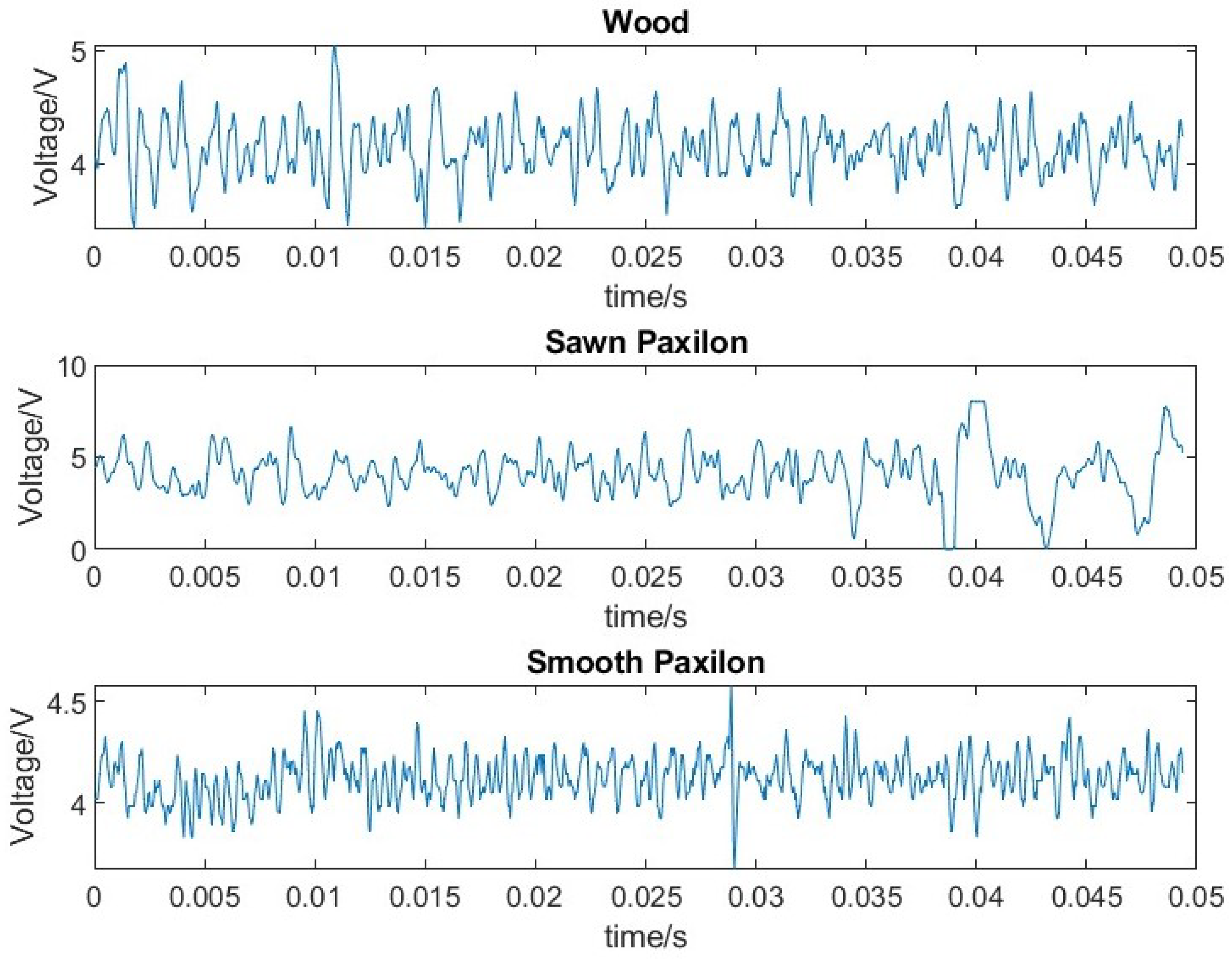
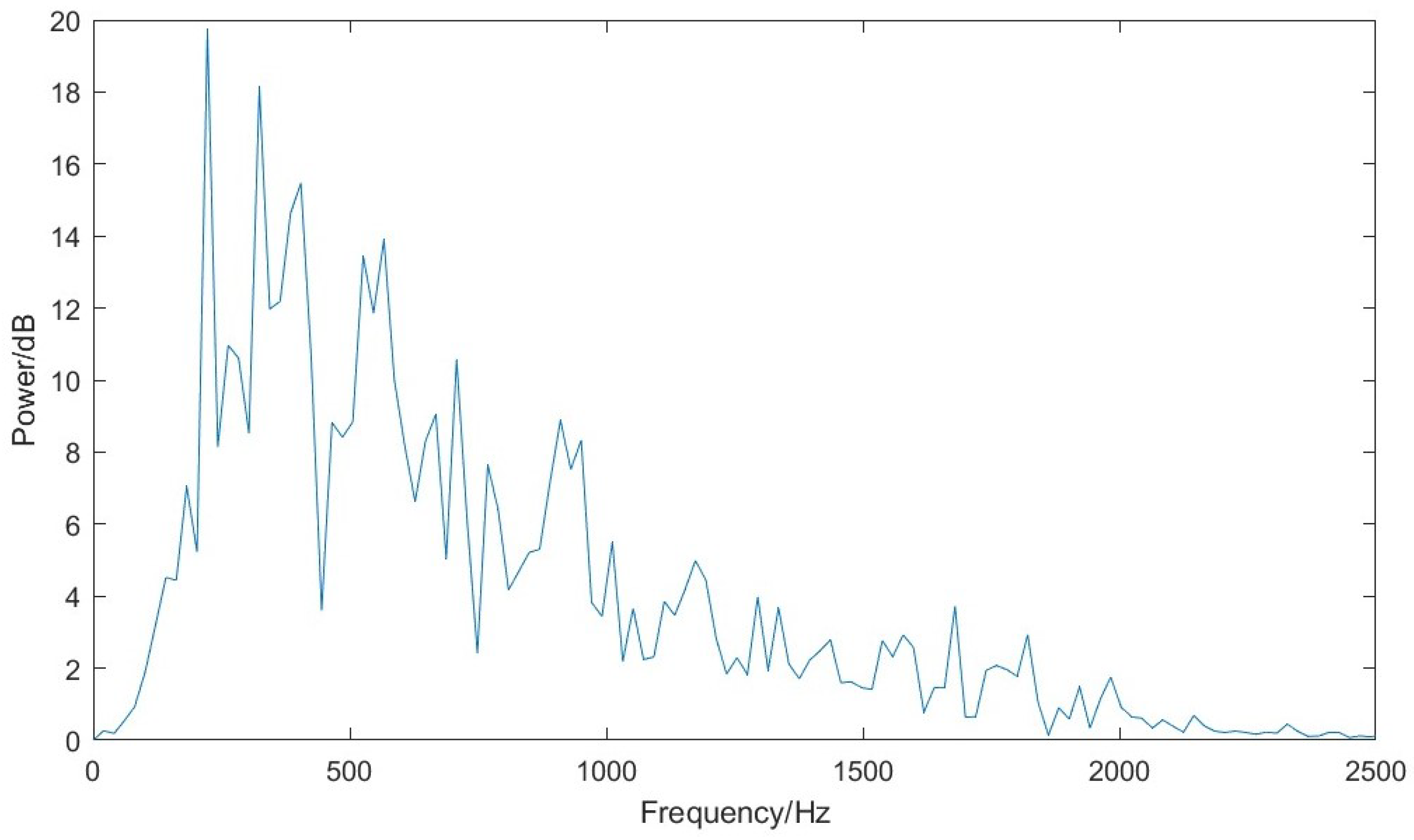
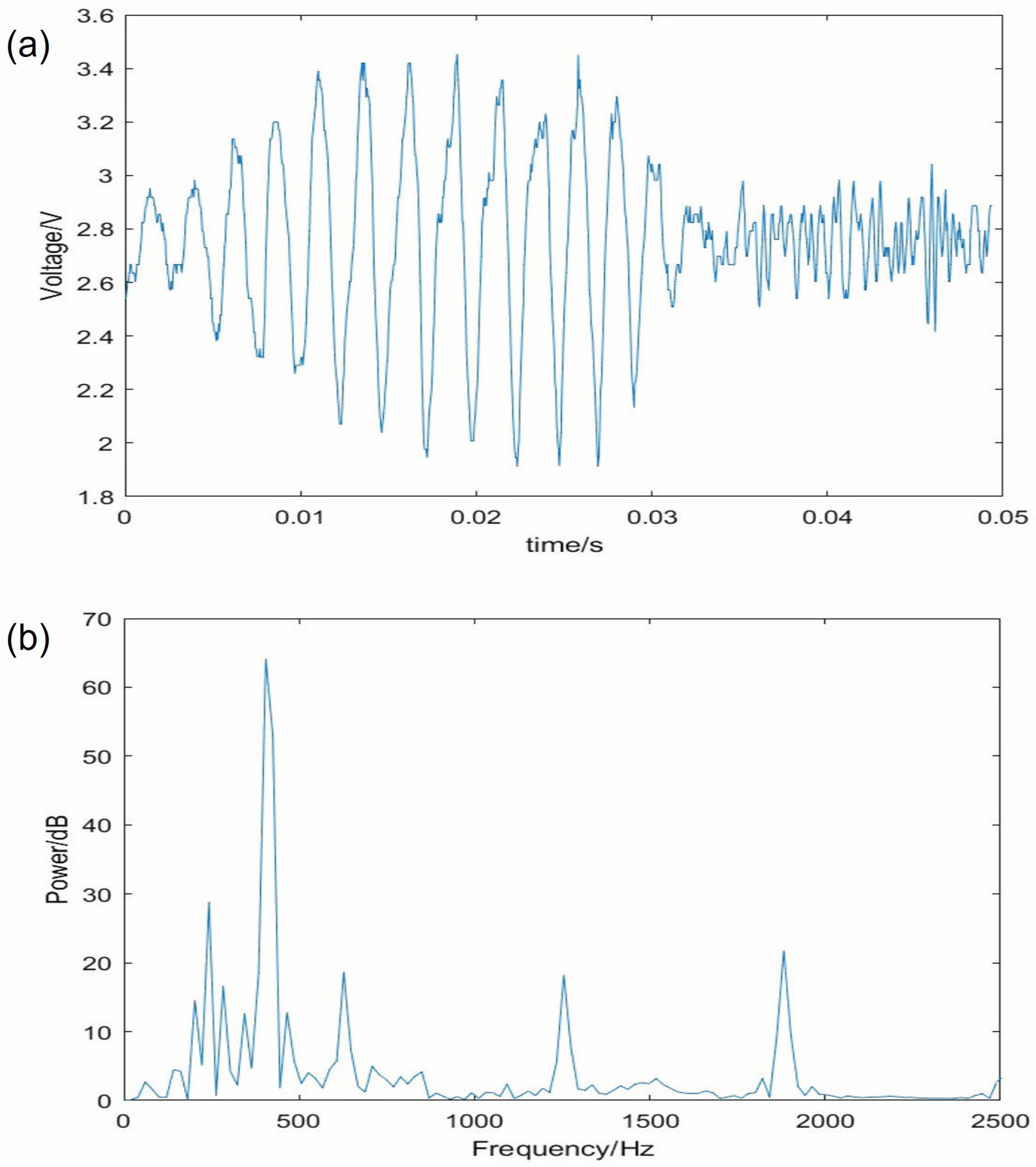
9.1. The Acoustic Signal
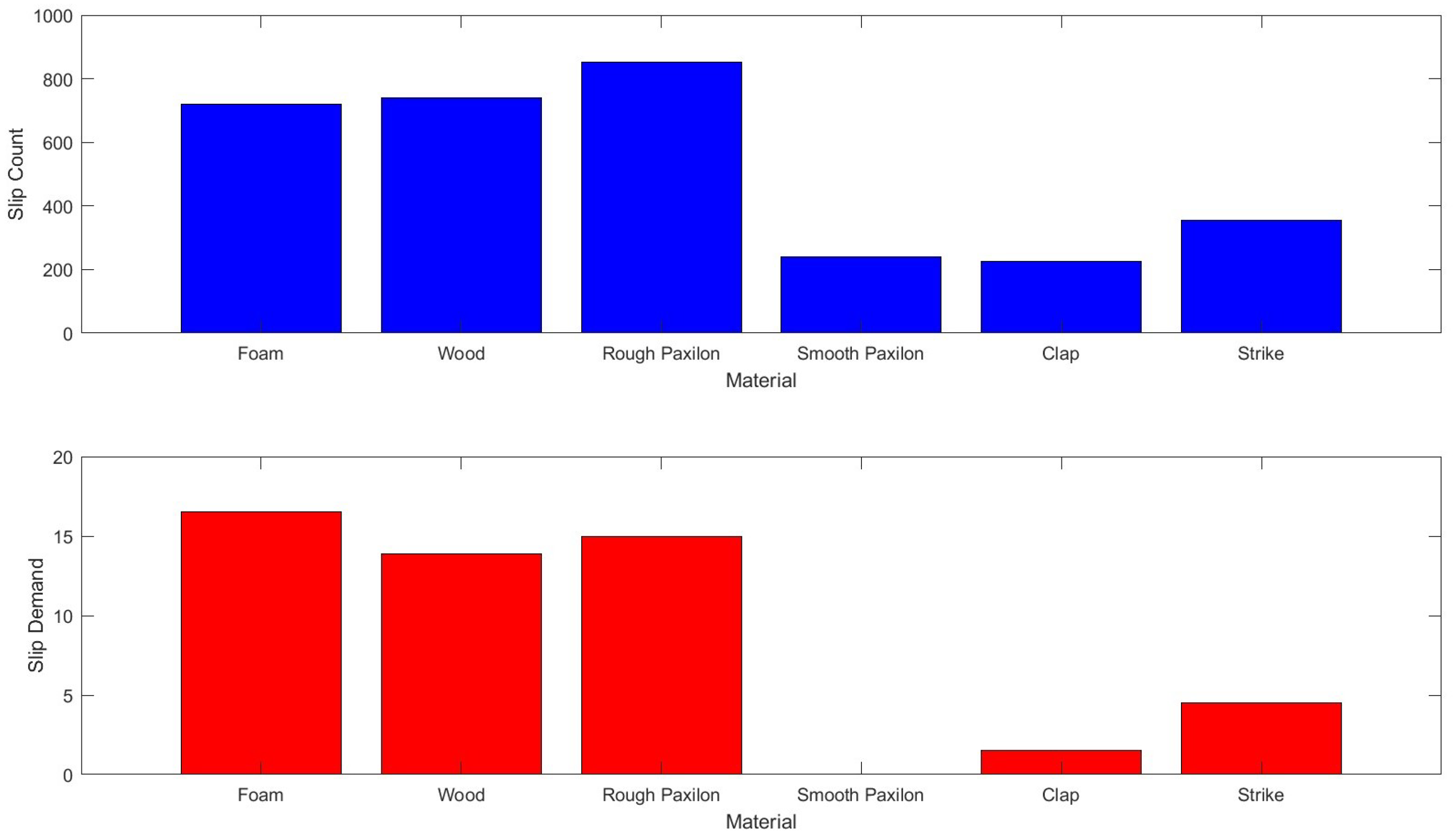
9.2. Pulse Counting
10. Discussion
Feedback to The User
11. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| CNS | Central Nervous System |
| EMG | Electromyogram |
| FLAG | Force Limiting Auto Grasp (Motion Control product) |
| FSR | Force Sensitive Resistor |
| LED | Light Emitting Diode |
| LOSH | Leverhulme Oxford Southampton Hand |
| MARCUS | Manipulation And Reaction Control under User Supervision |
| PIC | Programmable Intelligent Computer or Programmable Intelligent Computer |
| —A Microchip product | |
| PWM | Pulse Width Modulator |
| SUVA | Schweizerischen Unfall-Versicherungs-Anstalt, (Swiss Insurance Agency) |
| ToMPAW | Totally Modular Prosthetic Hand with A high Workability |
References
- Akay, A. Acoustics of friction. J. Acoust. Soc. Am. 2002, 111, 1525–1548. [Google Scholar] [CrossRef]
- Johansson, R.S.; Westling, G. Roles of glabrous skin receptors and sensorimotor memory in automatic control of precision grip when lifting rougher or more slippery objects. Exp. Brain Res. 1984, 56, 550–564. [Google Scholar] [CrossRef]
- Kinoshita, H.; Bäckström, L.; Flanagan, R.J.; Johansson, R.S. Tangential torque effects on the control of grip forces when holding objects with a precision grip. J. Neurophysiol. 1997, 78, 1619–1630. [Google Scholar] [CrossRef]
- Coleman, S. A Mechanical Hand with Automatic Proportional Control of Prehension. Med. Biol. Eng. 1967, 5, 505–511. [Google Scholar] [CrossRef]
- Dornfeld, D.; Handy, C. Slip detection using acoustic emission signal analysis. In Proceedings of the 1987 IEEE International Conference on Robotics and Automation, Raleigh, NC, USA, 31 March–3 April 1987; Volume 4, pp. 1868–1875. [Google Scholar] [CrossRef]
- Ikeda, A.; Kurita, Y.; Ueda, J.; Matsumoto, Y.; Ogasawara, T. Grip force control for an elastic finger using vision-based incipient slip feedback. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September 2004–2 October 2004; Volume 1, pp. 810–815. [Google Scholar] [CrossRef]
- Ho, V.A.; Dao, D.V.; Sugiyama, S.; Hirai, S. Development and analysis of a sliding tactile soft fingertip embedded with a microforce/moment sensor. IEEE Trans. Robot. 2011, 27, 411–424. [Google Scholar] [CrossRef]
- Diamond, M.E. Texture sensation through the fingertips and the whiskers. Curr. Opin. Neurobiol. 2010, 20, 319–327. [Google Scholar] [CrossRef]
- Rood, O. On the contraction of muscles, induced by contact with bodies in vibration. Am. J. Sci. Arts 1860, 24, 449. [Google Scholar]
- Wiertlewski, M.; Endo, S.; Wing, A.M.; Hayward, V. Slip-induced vibration influences the grip reflex: A pilot study. In Proceedings of the 2013 World Haptics Conference (WHC), Daejeon, Rebublic of Korea, 14–17 April 2013; pp. 627–632. [Google Scholar] [CrossRef]
- Westling, G.; Johansson, R.S. Factors influencing the force control during precision grip. Exp. Brain Res. 1984, 53, 277–284. [Google Scholar] [CrossRef]
- Sani, H.N.; Meek, S.G. Characterizing the performance of an optical slip sensor for grip control in a prosthesis. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1927–1932. [Google Scholar] [CrossRef]
- Kyberd, P. Making Hands: A History of Prosthetic Arms; Academic Press: Kidlington, Oxford, UK, 2022. [Google Scholar] [CrossRef]
- Bilotto, S. Upper extremity cosmetic gloves. Clin. Prosthet. Orthot. 1986, 10, 87–89. [Google Scholar]
- Wijk, U.; Carlsson, I. Forearm amputees’ views of prosthesis use and sensory feedback. J. Hand Ther. 2015, 28, 269–278. [Google Scholar] [CrossRef]
- Smit, G. Natural Grasping: Design and Evaluation of a Voluntary Closing Adaptive Hand Prosthesis. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2013. [Google Scholar]
- Okamoto, S.; Wiertlewski, M.; Hayward, V. Anticipatory vibrotactile cueing facilitates grip force adjustment during perturbative loading. IEEE Trans. Haptics 2016, 9, 233–242. [Google Scholar] [CrossRef]
- Kyberd, P.J.; Findlayson, D.; Jayasuriya, M.; Chibante, F. A Strengthened and Sensorised Custom Silicone Glove for use with an Intelligent Prosthetic Hand. Med. Eng. Phys. 2022, 107, 103845. [Google Scholar] [CrossRef]
- Deng, H.; Zhang, Y.; Duan, X.-G. Wavelet transformation-based fuzzy reflex control for prosthetic hands to prevent slip. IEEE Trans. Ind. Electron. 2016, 64, 3718–3726. [Google Scholar] [CrossRef]
- Haslinger, G. The Grip-Stabilising-Sensor‘An Example For Integrating Miniaturized Sensorics Into A Myo-Electric Hand’. In Proceedings of the MEC’97—Myoelectric Controls Syposium, Institute of Biomedical Engineering, University of New Brunswick, Fredericton, NB, Canada, 25–27 August 1997; pp. 44–45. [Google Scholar]
- Pasluosta, C.; Tims, H.; Chiu, A. Slippage sensory feedback and nonlinear force control system for a low-cost prosthetic hand. Am. J. Biomed. Sci 2009, 1, 295–302. [Google Scholar] [CrossRef]
- Yang, B.; Duan, X.; Deng, H. A simple method for slip detection of prosthetic hand. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 2159–2164. [Google Scholar] [CrossRef]
- Cotton, D.P.J.; Chappell, P.H.; Cranny, A.; White, N.M.M.; Beeby, S.P. A novel thick-film piezoelectric slip sensor for a prosthetic hand. IEEE Sensors J. 2007, 7, 752–761. [Google Scholar] [CrossRef]
- Oh, H.; Yi, G.-C.; Yip, M.; Dayeh, S.A. Scalable tactile sensor arrays on flexible substrates with high spatiotemporal resolution enabling slip and grip for closed-loop robotics. Sci. Adv. 2020, 6, eabd7795. [Google Scholar] [CrossRef]
- Moore, D. Development of multifunctional adaptive hand prosthesis. Ph.D. Thesis, Electrical Engineering Department, University of Southampton, England, UK, 1980. [Google Scholar]
- Lowe, R.J.; Chappell, P.H.; Ahmad, S.A. Using accelerometers to analyse slip for prosthetic application. Meas. Sci. Technol. 2010, 21, 035203. [Google Scholar] [CrossRef]
- Wettels, N.; Santos, V.J.; Johansson, R.S.; Loeb, G.E. Biomimetic tactile sensor array. Adv. Robot. 2008, 22, 829–849. [Google Scholar] [CrossRef]
- Su, Z.; Hausman, K.; Chebotar, Y.; Molchanov, A.; Loeb, G.E.; Sukhatme, G.S.; Schaal, S. Force estimation and slip detection/classification for grip control using a biomimetic tactile sensor. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Republic of Korea, 3–5 November 2015; pp. 297–303. [Google Scholar] [CrossRef]
- Veiga, F.; Peters, J.; Hermans, T. Grip stabilization of novel objects using slip prediction. IEEE Trans. Haptics 2018, 11, 531–542. [Google Scholar] [CrossRef]
- Chorley, C.; Melhuish, C.; Pipe, T.; Rossiter, J. Development of a tactile sensor based on biologically inspired edge encoding. In Proceedings of the 2009 International Conference on Advanced Robotics, Munich, Germany, 22–26 June 2009; pp. 1–6. [Google Scholar]
- James, J.W.; Pestell, N.; Fepora, N. Slip detection with a biomimetic tactile sensor. IEEE Robot. Autom. Lett. 2018, 3, 3340–3346. [Google Scholar] [CrossRef]
- Lepora, N.F.; Aquilina, K.; Cramphorn, L. Exploratory tactile servoing with active touch. IEEE Robot. Autom. Lett. 2017, 2, 1156–1163. [Google Scholar] [CrossRef]
- Mukashev, D.; Zhuzbay, N.; Koshkinbayeva, A.; Orazbayev, B.; Kappassov, Z. PhotoElasticFinger: Robot Tactile Fingertip Based on Photoelastic Effect. Sensors 2022, 22, 6807. [Google Scholar] [CrossRef]
- Cutkosky, M. On Grasp Choice, Grasp Models, and the Design of Hands for Manufacturing Tasks. IEEE Trans. Robot. Autom. 1989, 5, 269–279. [Google Scholar] [CrossRef]
- Feix, T.; Bullock, I.; Dollar, A. Analysis of Human Grasping Behavior: Object Characteristics and Grasp Type. IEEE Trans. Haptics 2014, 7, 311–323. [Google Scholar] [CrossRef]
- Napier, J. The prehensile movements of the human hand. J. Bone Jt. Surg. 1956, 38B, 902–913. [Google Scholar] [CrossRef]
- Kargov, A.; Pylatiuk, C.; Martin, J.; Schulz, S.; Döderlein, L. A comparison of the grip force distribution in natural hands and in prosthetic hands. Disabil. Rehabil. 2004, 26, 705–711. [Google Scholar] [CrossRef]
- Herberts, P.; Almström, C.; Kadefors, R.; Lawrence, P. Hand Prosthesis Control via Myoelectric Patterns. Acta Orthop. Scand. 1973, 44, 389–409. [Google Scholar] [CrossRef]
- Stavdahl, Ø.; Fougner, A.; Kyberd, P. Simultaneous Proportional Control of Multiple Functions in Upper-Limb Prostheses. In Proceedings of the 12th ISPO World Congress of the International Society of Prosthetics and Orthotics; International Society of Prosthetics and Orthotics, Vancouver, BC, Canada, 28 July–3 August 2007; p. 290. [Google Scholar]
- Nightingale, J. Microprocessor control of an artificial arm. J. Microcomput. Appl. 1985, 8, 167–173. [Google Scholar] [CrossRef]
- Codd, R.; Nightingale, J.; Todd, R. An adaptive multi-functional hand prosthesis. J. Physiol. 1973, 232, 55–56. [Google Scholar]
- Kyberd, P.; Mustapha, N.; Carnegie, F.; Chappell, P. Clinical Experience with a hierarchically controlled myoelectric hand prosthesis with vibro-tactile feedback. Prosthet. Orthot. Int. 1993, 17, 56–64. [Google Scholar] [CrossRef]
- Kyberd, P.; Poulton, A. Use of Accelerometers in the Control of Practical Prosthetic Arms. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1884–1891. [Google Scholar] [CrossRef]
- Storey, N.; Todd, R.; Nightingale, J. Cartesian co-ordinate control of a complete arm prosthesis. In Proceedings of the 5th International Symposium on External Control of Human Extremities, Dubrovnik, Yugoslavia, 25–30 August 1975; pp. 489–497. [Google Scholar]
- Swain, I.; Nightingale, J. An Adaptive Control System for a Complete Hand/Arm Prosthesis. J. Biomed. Eng. 1980, 2, 163–166. [Google Scholar] [CrossRef]
- Kyberd, P.; Light, C.; Nightlingale, J.; Whatley, D.; Evans, M. The Design of Anthropomorphic Prosthetic Hands, a study of the Southampton Hand. Robotica 2001, 19, 593–600. [Google Scholar] [CrossRef]
- Kyberd, P.; Poulton, A.S.; Sandsjö, L.; Jönsson, S.; Jones, B.; Gow, D. The ToMPAW modular prosthesis - A platform for research in Upper Limb prosthetics. J. Prosthet. Orthot. 2007, 19, 12–21. [Google Scholar] [CrossRef]
- Tyler, D. Long-term Peripheral Nerve Interfaces to restore sensation. In Proceedings of the MEC’14 Myoelectric Controls Symposium, Fredericton, NB, Canada, 19–20 August 2014; p. 22. [Google Scholar]
- Chappell, P.; Nightingale, J.; Kyberd, P.; Barkhordar, M. Control of a single degree of freedom artificial hand. J. Biomed. Eng. 1987, 9, 273–277. [Google Scholar] [CrossRef]
- Meek, S.; Jacobsen, S.; Goulding, P. Extended physiologic taction: Design and evaluation of a proportional force feedback system. J. Rehabil. Res. Dev. 1989, 26, 53–62. [Google Scholar]
- Abd, M.A.; Al-Saidi., M.; Lin, M.; Liddle, G.; Mondal, K.; Engeberg, E.D. Surface feature recognition and grasped object slip prevention with a liquid metal tactile sensor for a prosthetic hand. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York, NY, USA, 29 November–1 December 2020; pp. 1174–1179. [Google Scholar] [CrossRef]
- Wu, H.; Fang, Y.; Sheng, X. Design of Fingertip Pressure Sensors for Prosthetic Hands. In Proceedings of the 2020 IEEE International Conference on Real-time Computing and Robotics (RCAR), Asahikawa, Japan, 28–29 September 2020; pp. 32–37. [Google Scholar] [CrossRef]
- Barkhordar, M.; Nightingale, J.; May, D. Pressure or Touch. Sensor. Patent No. GB2156512, 23 April 1984. [Google Scholar]
- Thomas, N.; Fazlollahi, F.; Brown, J.D.; Kuchenbecker, K.J. Sensorimotor-inspired Tactile Feedback and Control Improve Consistency of Prosthesis Manipulation in the Absence of Direct Vision. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 6174–6181. [Google Scholar] [CrossRef]
- Codd, R. Development and evaluation of adaptive control for a hand prosthesis. Ph.D. Thesis, Electrical Engineering Department, University of Southampton, England, UK, 1975. [Google Scholar]
- Nightingale, J.M.; Sedgewick, E.M. Control of movement via skeletal muscles. In IEE Control Engineering Series 11, Biological Systems, Modelling and Control; pp. 84–108. Available online: https://doi.org/10.1016/0378-4754(80)90085-3 (accessed on 23 April 2023). [CrossRef]
- Barkhordar, M. The control of a multifunction hand prosthesis. Ph.D. Thesis, Electrical Engineering Department, University of Southampton, Southampton, UK, 1988. [Google Scholar]
- Kyberd, P. The Algorithmic Control of a multifunction hand prosthesis. Ph.D. Thesis, Electrical Engineering Department, Southampton University, Southampton, UK, 1990. [Google Scholar]
- Kyberd, P.; Evans, M.; te Winkel, S. An Intelligent Anthropomorphic Hand, with Automatic Grasp. Robotica 1998, 16, 531–536. [Google Scholar] [CrossRef]
- Kyberd, P.; Chappell, P. Characterisation of a touch and slip sensor for autonomous manipulation. Meas. Sci. Technol. 1992, 3, 969. [Google Scholar] [CrossRef]
- Kyberd, P.; Chappell, P. A Force sensor for automatic manipulation based on the Hall effect. Meas. Sci. Technol. 1993, 4, 311–315. [Google Scholar] [CrossRef]
- Ruffalo, J.K.; Miller, J.D.; Berkland, C.J. Compression sensors constructed from ferromagnetic particles embedded within soft materials. MRS Commun. 2021, 11, 94–99. [Google Scholar] [CrossRef]
- Todd, R. Adaptive control of a hand prosthesis. Ph.D. Thesis, Electrical Engineering Department, University of Southampton, Southampton, UK, 1969. [Google Scholar]
- Kyberd, P.; Chappell, P. Object-slip detection during manipulation using a derived force vector. Mechatronics 1992, 2, 1–14. [Google Scholar] [CrossRef]
- Boness, R.J.; McBride, S.L. Adhesive and abrasive wear studies using acoustic emission techniques. Wear 1991, 149, 41–53. [Google Scholar] [CrossRef]
- Yokoi, M.; Nakai, M. A Fundamental Study on Frictional Noise: 3rd Report, The influence of periodic surface roughness on frictional noise. Bull. JSME 1981, 24, 1470–1476. [Google Scholar] [CrossRef]
- Popp, K.; Stelter, P. Stick-slip vibrations and chaos. Philos. Trans. Phys. Sci. Eng. 1990, 332, 89–105. Available online: https://www.jstor.org/stable/76822 (accessed on 23 April 2023).
- Fan, Y.; Gu, F.; Ball, A. Modelling acoustic emissions generated by sliding friction. Wear 2010, 268, 811–815. [Google Scholar] [CrossRef]
- Yokoi, M.; Nakai, M. A Fundamental Study on Frictional Noise: (5th Report, The influence of random surface roughness on frictional noise). Bull. JSME 1982, 25, 827–833. [Google Scholar] [CrossRef][Green Version]
- Yokoi, M.; Nakai, M. A fundamental study on frictional noise: 1st report, the generating mechanism of rubbing noise and squeal noise. Bull. JSME 1979, 22, 1665–1671. [Google Scholar] [CrossRef]
- Asamene, K.; Sundaresan, M. Analysis of experimentally generated friction related acoustic emission signals. Wear 2012, 296, 607–618. [Google Scholar] [CrossRef]
- Massalim, Y.; Kappassov, Z.; Varol, H.; Hayward, V. Robust detection of absence of slip in robot hands and feet. IEEE Sensors J. 2021, 21, 27897–27904. [Google Scholar] [CrossRef]
- Chadwell, A.; Kenney, L.; Granat, M.; Thies, S.; Head, J.; Galpin, A.; Baker, R.; Kulkarni, J. Upper limb activity in myoelectric prosthesis users is biased towards the intact limb and appears unrelated to goal-directed task performance. Sci. Rep. 2018, 8, 11084. [Google Scholar] [CrossRef]
- Hudgins, B.; Parker, P.; Scott, R. A new strategy for multifunction myoelectric control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef]
- Romeo, R.; Lauretti, C.; Gentile, C.; Guglielmelli, E.; Zollo, L. Method for Automatic Slippage Detection With Tactile Sensors Embedded in Prosthetic Hands. IEEE Trans. Med. Robot. Bionics 2021, 3, 485–497. [Google Scholar] [CrossRef]
- Cordella, F.; Gentile, C.; Zollo, L.; Barone, R.; Sacchetti, R.; Davalli, A.; Siciliano, B.; Guglielmelli, E. A force-and-slippage control strategy for a poliarticulated prosthetic hand. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3524–3529. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyberd, P. Slip Detection Strategies for Automatic Grasping in Prosthetic Hands. Sensors 2023, 23, 4433. https://doi.org/10.3390/s23094433
Kyberd P. Slip Detection Strategies for Automatic Grasping in Prosthetic Hands. Sensors. 2023; 23(9):4433. https://doi.org/10.3390/s23094433
Chicago/Turabian StyleKyberd, Peter. 2023. "Slip Detection Strategies for Automatic Grasping in Prosthetic Hands" Sensors 23, no. 9: 4433. https://doi.org/10.3390/s23094433
APA StyleKyberd, P. (2023). Slip Detection Strategies for Automatic Grasping in Prosthetic Hands. Sensors, 23(9), 4433. https://doi.org/10.3390/s23094433