
A Novel Near-Surface Wave-Coherent Instantaneous Profiling System for Atmospheric Measurements


Abstract
1. Introduction
2. Materials and Methods
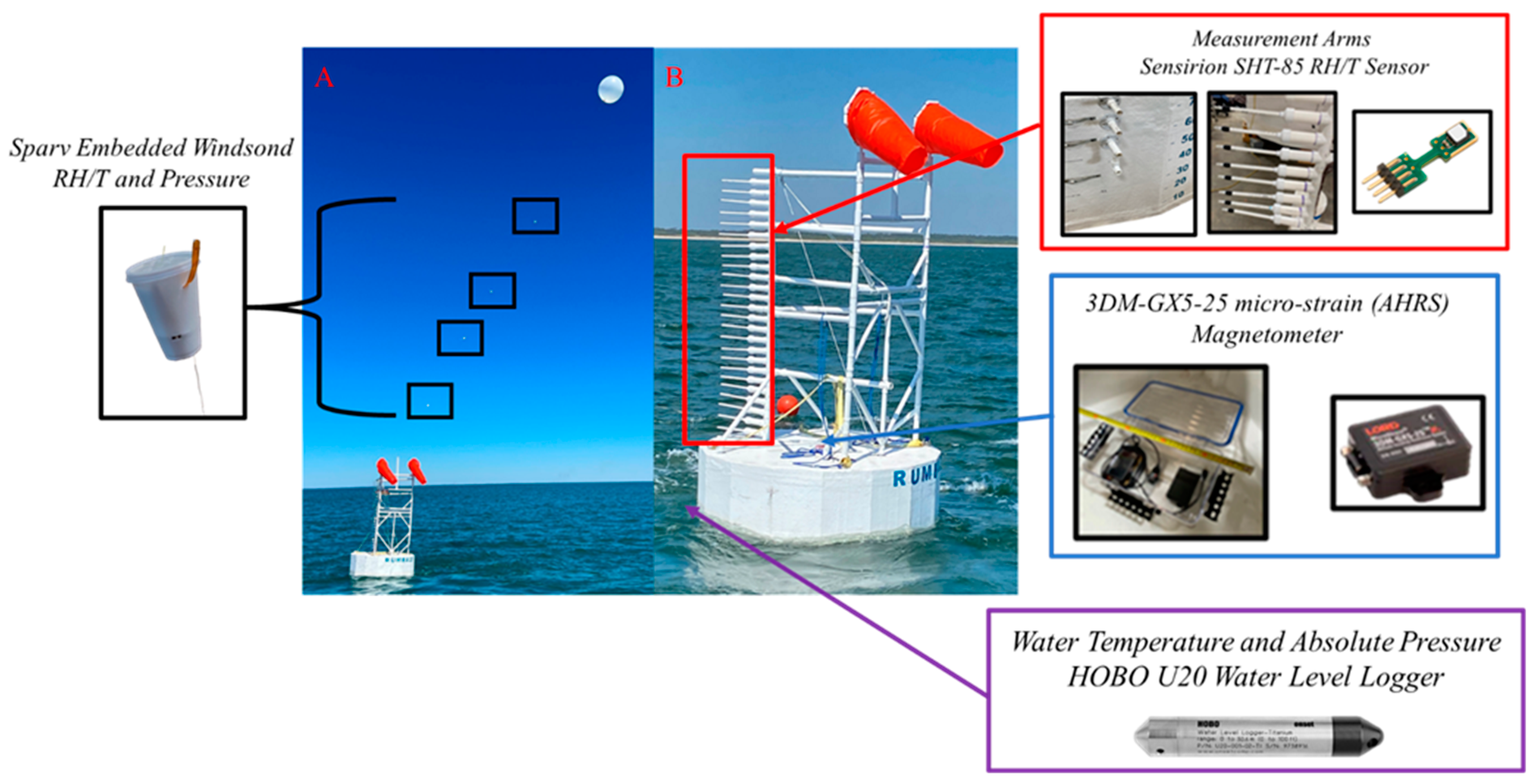
2.1. NWIPS Design
2.2. Field Experiment
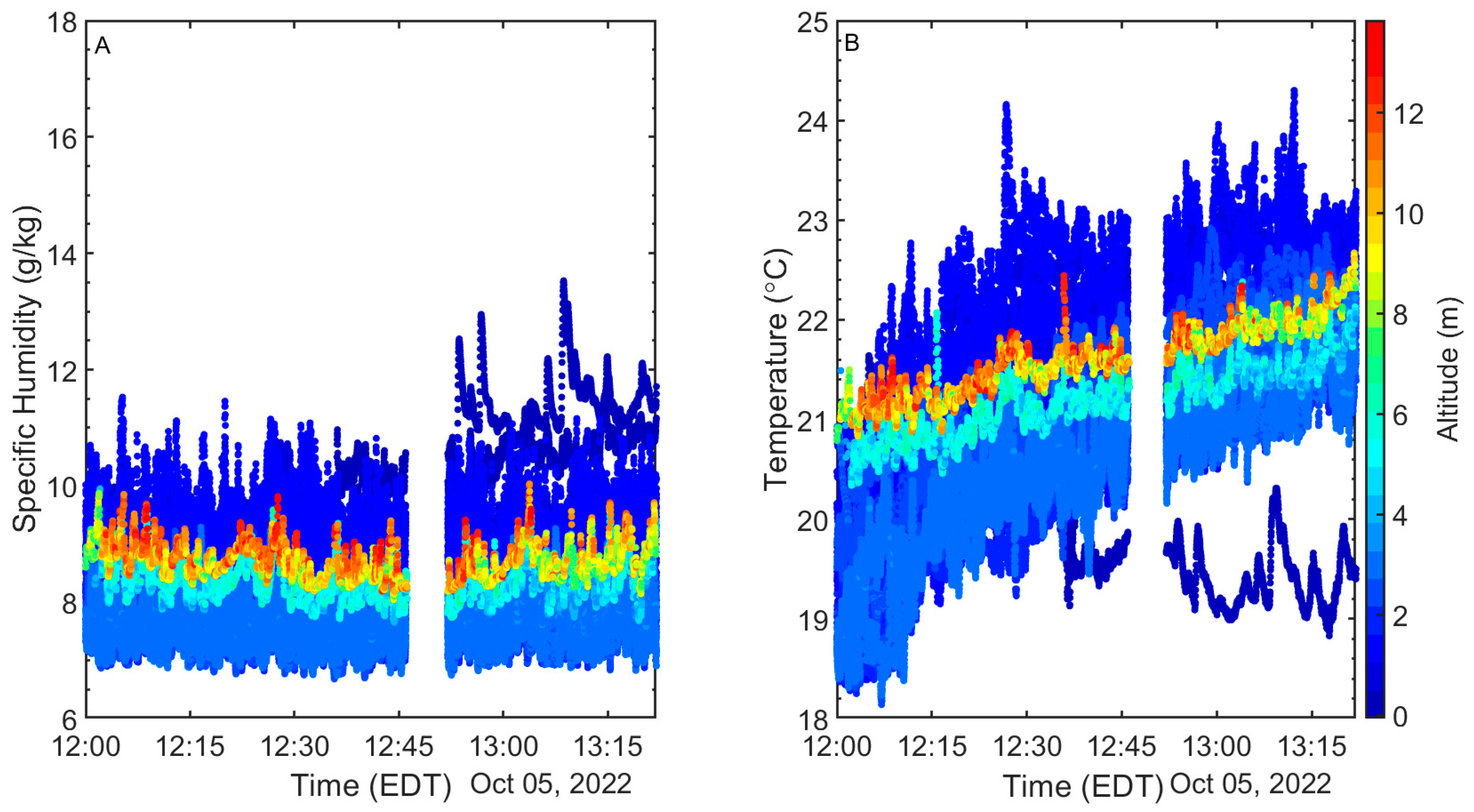
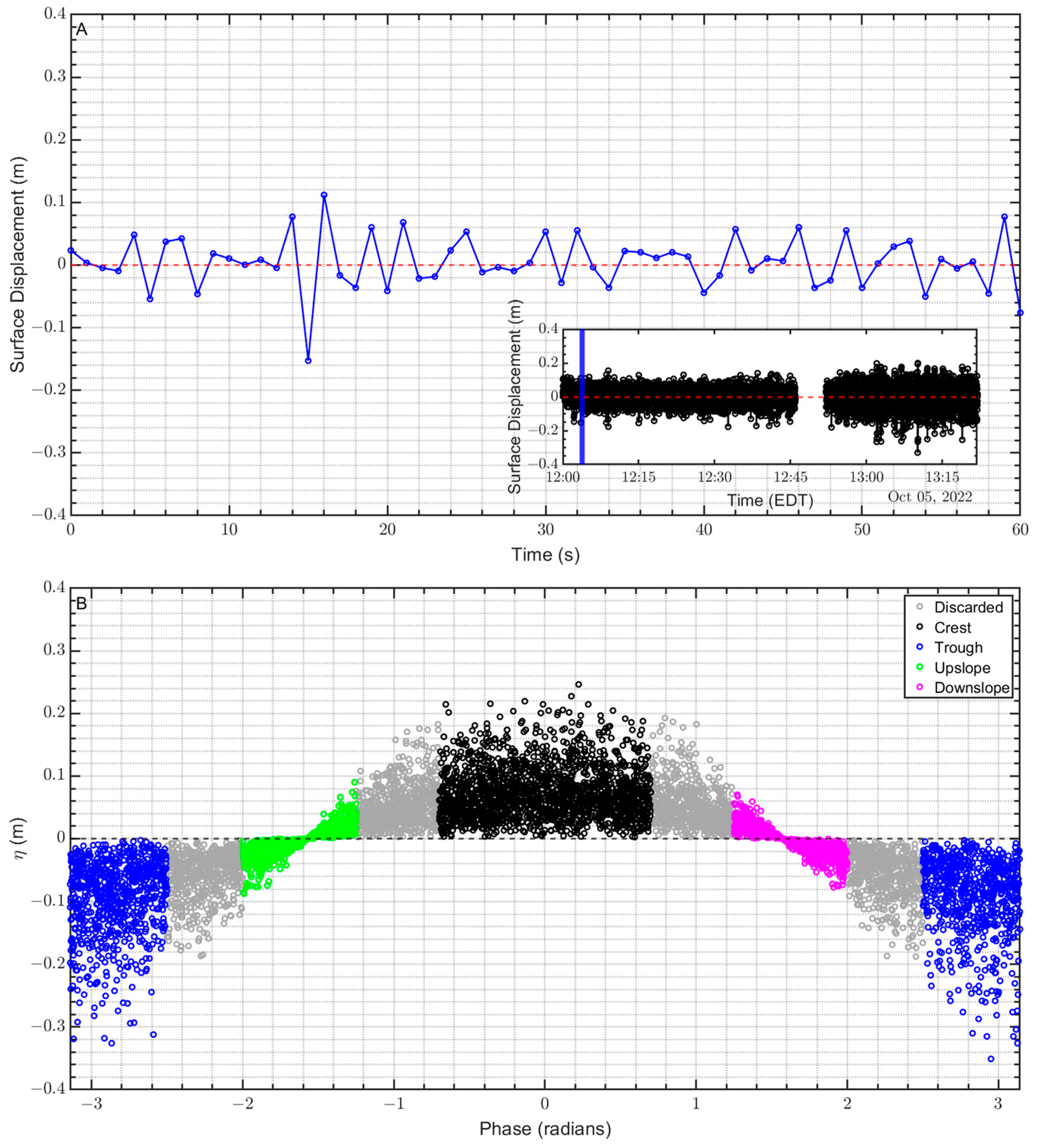
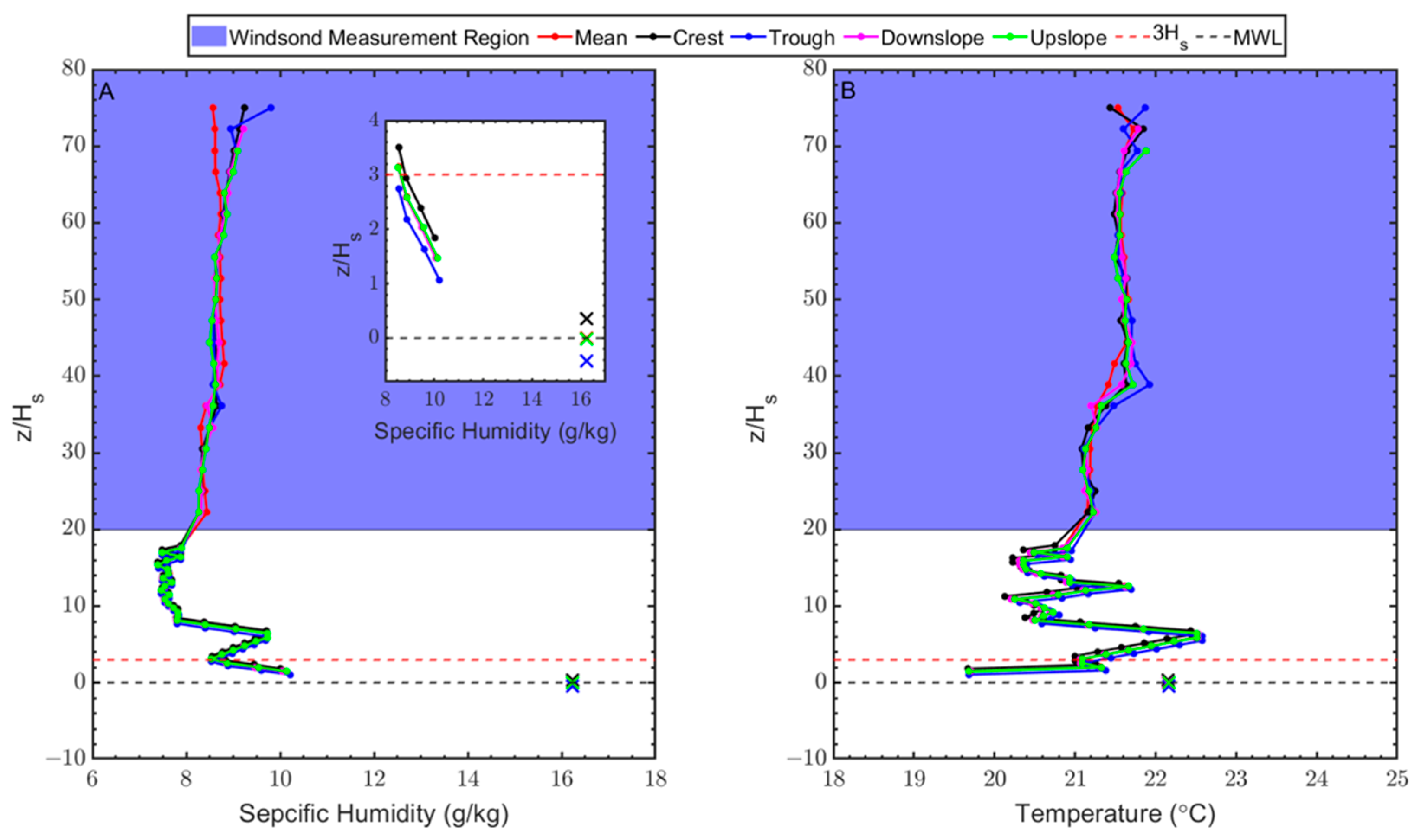
3. Results
4. Summary and Discussion
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mueller, J.A.; Veron, F. Bulk Formulation of the Heat and Water Vapor Fluxes at the Air-sea Interface, Including Nonmolecular Contributions. J. Atmos. Sci. 2010, 67, 234–247. [Google Scholar] [CrossRef]
- Rutgersson, A.; Smedman, A.; Hogstrom, U. Use of Conventional Stability Parameters During Swell. J. Geophys. Res. 2001, 106, 27117–27134. [Google Scholar] [CrossRef]
- McKenna, S.P.; McGillis, W.R. The role of Free-surface Turbulence and Surfactants in Air-water Gas Transfer. Int. J. Heat Mass Transf. 2004, 47, 539–553. [Google Scholar] [CrossRef]
- Wang, Q.; Alappattu, D.P.; Billingsley, S.; Blomquist, B.; Burkholder, R.J.; Christman, A.J.; Creegan, E.D.; de Paolo, T.; Eleuterio, D.P.; Fernando, H.J.S.; et al. CASPER: Coupled air–sea Processes and Electromagnetic Ducting Research. Bull. Am. Meteorol. Soc. 2018, 99, 1449–1471. [Google Scholar] [CrossRef]
- Ortiz-Suslow, D.G.; Kalogiros, J.; Yamaguchi, R.; Wang, Q. An Evaluation of the Constant Flux Layer in the Atmospheric Flow Above the Wavy Air-sea Interface. J. Geophys. Res. Atmos. 2021, 26, 2834. [Google Scholar] [CrossRef]
- Fang, P.; Zhao, B.; Zeng, Z.; Yu, H.; Lei, X.; Tan, J. Effects of Wind Direction on Variations in Friction Velocity with Wind Speed under Conditions of Strong Onshore Wind. J. Geophys. Res. Atmos. 2018, 123, 7340–7353. [Google Scholar] [CrossRef]
- Li, Q.; Bou-Zeid, E.; Vercauteren, N.; Parlange, M. Signatures of Air-wave Interactions Over a Large Lake. Bound. Layer Meteorol. 2018, 167, 445–468. [Google Scholar] [CrossRef]
- Katz, J.; Zhu, P. Evaluation of Surface Layer Flux Parameterizations using in-situ Observations. Atmos. Res. 2017, 194, 150–163. [Google Scholar] [CrossRef]
- Shabani, B.; Nielsen, P.; Baldock, T. Direct Measurements of Wind Stress over the Surf Zone. J. Geophys. Res. Ocean. 2014, 119, 2949–2973. [Google Scholar] [CrossRef]
- Zhao, Z.-K.; Liu, C.-X.; Li, Q.; Dai, G.-F.; Song, Q.-T.; Lv, W.-H. Typhoon Air-sea Drag Coefficient in Coastal Regions. J. Geophys. Res. Ocean. 2015, 120, 716–727. [Google Scholar] [CrossRef]
- Cronin, M.; Gentemann, C.; Edson, J.; Ueki, I.; Bourassa, M.; Brown, S.; Clayson, C.A.; Fairall, C.W.; Farrar, J.T.; Gille, S.T.; et al. Air-sea Fluxes with a Focus on Heat and Momentum. Front. Mar. Sci. 2019, 6, 430. [Google Scholar] [CrossRef]
- DeCosmo, J.; Katsaros, K.; Smith, S.; Anderson, R.; Oost, W.; Bumke, K.; Chadwick, H. Air-sea Exchange of Water Vapor and Sensible Heat: The Humidity Exchange Over the Sea (HEXOS) results. J. Geophys. Res. C Ocean. 1996, 101, 12001–12016. [Google Scholar] [CrossRef]
- Kang, D.; Wang, Q. Optimized Estimation of Surface Layer Characteristics from Profiling Measurements. Atmosphere 2016, 7, 14. [Google Scholar] [CrossRef]
- Hall, C.; Bouchard, R.; Riley, R.; Stewart, R.; Wang, D.; DiNapoli, S. Emerging National Data Buoy Center (NDBC) Wave Systems. In Proceedings of the JCOMM DBCP-34 Meeting, Cape Town, South Africa, 23–26 October 2018. [Google Scholar]
- Frederickson, P.; Davidson, K.; Anderson, K.; Tsintikidis, D.; Brooks, B.; Caffrey, P.; Clarke, A.; Cohen, L.; Crahan, K.; Dion, D.; et al. Air-sea Interaction Processes Observed from Buoy and Propagation Measurements during the Red Experiment. Bull. Am. Meteorol. Soc. 2004, 1355–1365. [Google Scholar]
- de Boer, G.; Calmer, R.; Jozef, G.; Cassano, J.J.; Hamilton, J.; Lawrence, D.; Borenstein, S.; Doddi, A.; Cox, C.; Schmale, J.; et al. Observing the Central Arctic Atmospheric and Surface with University of Colorado Uncrewed Aircraft Systems. Sci. Data 2022, 9, 439. [Google Scholar] [CrossRef]
- Stanek, M.; Hackett, E. Towards obtaining high-resolution vertical distributions of temperature and humidity near the ocean surface: A low-cost platform design. In Proceedings of the 7th Young Coastal Scientists and Engineers Conference—Americas, Myrtle Beach, SC, USA, 29–31 October 2021. [Google Scholar]
- Mitsuta, Y.; Fujitani, T. Direct Measurements of Turbulent Fluxes on a Cruising Ship. Bound. Layer Meteorol. 1974, 6, 203–217. [Google Scholar] [CrossRef]
- Bradley, E.; Coppin, P.; Godfrey, J. Measurements of Sensible and Latent Het Flux in the Western Equatorial Pacific Ocean. J. Geophys. Res. 1991, 96, 3375–3389. [Google Scholar] [CrossRef]
- Monin, A.S.; Obukhov, A.M. Basic Laws of Turbulent Mixing in the Surface Layer of the Atmosphere. Tr. Akad. Nauk. SSSR Geofiz. Inst. 1954, 24, 163–187. [Google Scholar]
- Fairall, C.; Bradley, E.; Hare, J. Bulk Parameterization of Air-sea Fluxes: Updates and Verification for the COARE Algorithm. J. Clim. 2003, 16, 571–591. [Google Scholar] [CrossRef]
- Fairall, C.; Bradley, E.; Rogers, D.; Edson, J.; Young, G. Bulk Parametrization of Air-sea Fluxes for Tropical Ocean and Global Atmosphere Coupled Ocean—Atmosphere Response Experiment. J. Geophys. Res. 1996, 101, 3747–3764. [Google Scholar] [CrossRef]
- Alappattu, D.; Wang, Q.; Yamaguchi, R.; Lind, R.; Reynolds, M.; Christman, A.J. Warm Layer and Cool Skin Corrections for Bulk Water Temperature Measurements for Air-sea Interaction Studies. J. Geophys. Res. 2017, 122, 6470–6481. [Google Scholar] [CrossRef]
- Tanner, B.D. Automated weather stations. Remote Sens. Rev. 1990, 5, 73–98. [Google Scholar] [CrossRef]
- Gill, G.C. Comparison Testing of Selected Naturally Ventilated Solar Radiation Shields; NOAA Data Buoy Office Report, Contract NA-82–0A-A-266; NOAA: Bay St. Louis, MS, USA, 1983. [Google Scholar]
- Brumer, S.; Zappa, C.; Brooks, I.; Tamura, H.; Brown, S.; Blomquist, B.; Fairall, C.; Cifuentes-Lorenzen, A. Whitecap Coverage Dependence on Wind and Wave Statistics Observed During SO GasEX and HiWinGS. J. Phys. Oceanogr. 2017, 47, 2211–2235. [Google Scholar] [CrossRef]
- Hackett, E.E.; Luznik, L.; Nayak, A.; Katz, J.; Osborn, T. Field Measurements of Turbulence at an Unstable Interface Between Current and Wave Bottom Boundary Layers. J. Geophys. Res. 2011, 116, C02022. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensirion SHT-85 | Sparv Embedded Windsond (S1H3) | Vaisala WXT536 | |
|---|---|---|---|
| Temperature | ±0.1 °C τ = 5 s | ±0.2 °C τ = 6 s | ±0.3 °C τ = not provided |
| Relative Humidity (RH) | ±1.5% RH τ = 8 s | ±1.8% τ = 6 s | ±3% at 0–90% RH ±5% at 90−100% RH τ = not provided |
| Pressure | - | ±1 mb | ±1 mb |
| Wind Speed | - | - | ±3% at 10 m/s τ = 0.25 s |
| Wind Direction | - | - | ±3.0° at 10 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stanek, M.J.; Pastore, D.M.; Hackett, E.E. A Novel Near-Surface Wave-Coherent Instantaneous Profiling System for Atmospheric Measurements. Sensors 2023, 23, 4099. https://doi.org/10.3390/s23084099
Stanek MJ, Pastore DM, Hackett EE. A Novel Near-Surface Wave-Coherent Instantaneous Profiling System for Atmospheric Measurements. Sensors. 2023; 23(8):4099. https://doi.org/10.3390/s23084099
Chicago/Turabian StyleStanek, Mathew J., Douglas M. Pastore, and Erin E. Hackett. 2023. "A Novel Near-Surface Wave-Coherent Instantaneous Profiling System for Atmospheric Measurements" Sensors 23, no. 8: 4099. https://doi.org/10.3390/s23084099
APA StyleStanek, M. J., Pastore, D. M., & Hackett, E. E. (2023). A Novel Near-Surface Wave-Coherent Instantaneous Profiling System for Atmospheric Measurements. Sensors, 23(8), 4099. https://doi.org/10.3390/s23084099