

Distributed Consensus Kalman Filter Design with Dual Energy-Saving Strategy: Event-Triggered Schedule and Topological Transformation


Abstract
1. Introduction
- We propose a unique data fusion strategy (see Equation (9)), according to five communication situations between nodes i and j. It can effectively decline the effect of packet loss in the network in full using historical data.
- We propose a new topological transformation rule (see Equation (7)) based on the energy consumption model of nodes in WSNs. It avoids the single node from consuming energy too fast. Thus, the WSN lifetime is extended.
- We designed a novel distributed consensus Kalman filter based on an event-triggered schedule and topological transformation. Unlike the generally distributed Kalman filter, the proposed filter with a dual energy-saving strategy is able to offer more possibilities for energy savings in WSNs.
2. Mathematical Preliminaries
3. Problem Statement and Strategic Design
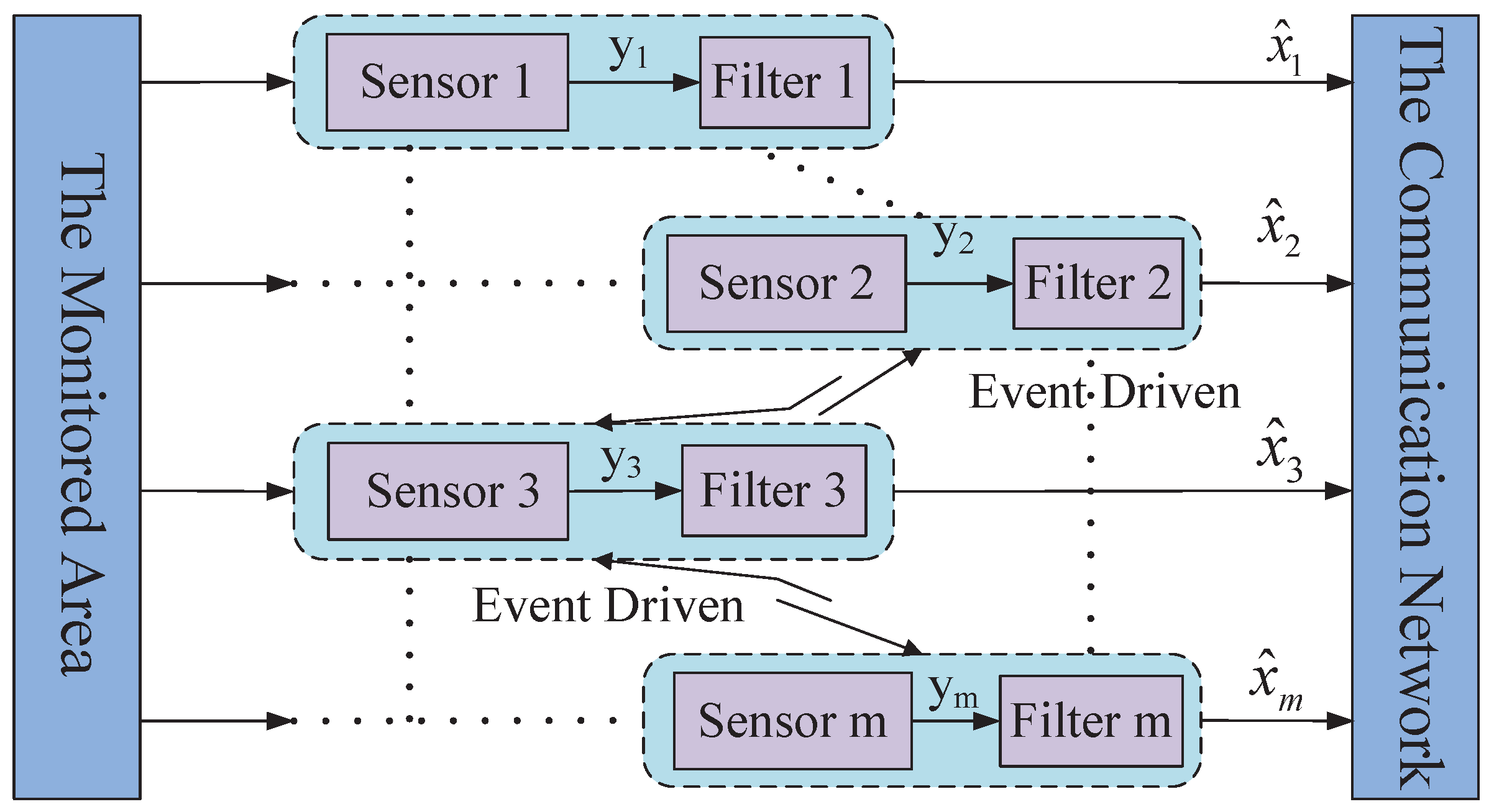
3.1. Problem Statement
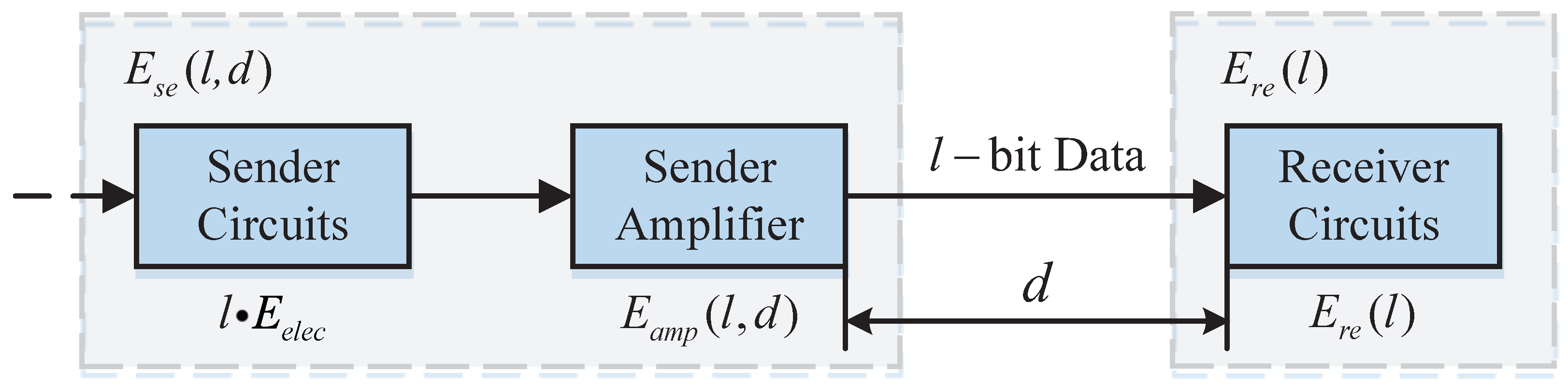
3.2. Energy-Saving Strategic Design
3.2.1. Event-Triggered Schedule
- Timeliness window (TW): In WSNs, node i can store the information received from neighbor within a period of time and the information can be used by node i in this period. This period is defined as a timeliness window, also known as the timeliness period denoted by . As a result, the neighbor node j in TW is called the timeliness neighbor of node i denoted by .
- Real-time neighbor (RN): If node j sends information to node i at the k instance, then j is a real-time neighbor of node i at this sampling time. It is denoted by .
- Effective neighbor (EN): If node j is the timeliness neighbor of node i or its real-time neighbor, then it is called an effective neighbor of node i. It is denoted by . It is clear that .
- When the event is triggered (), node i may receive the information coming from neighbor j.
- When the event is triggered (), node i does not receive the information of neighbor j because the packet dropout occurred, but it stores the effective information of neighbor j.
- When the event is triggered (), the information of neighbor j is continuously lost from the instance to the k instance during the transmission, then the information of node j stored in node i is invalid.
- When the event is not triggered (), the latest information of node j stored in node i is valid.
- When the event is not triggered (), the information of j stored in i is invalid.
3.2.2. Topology Transformation Schedule
4. Distributed State Estimator Design
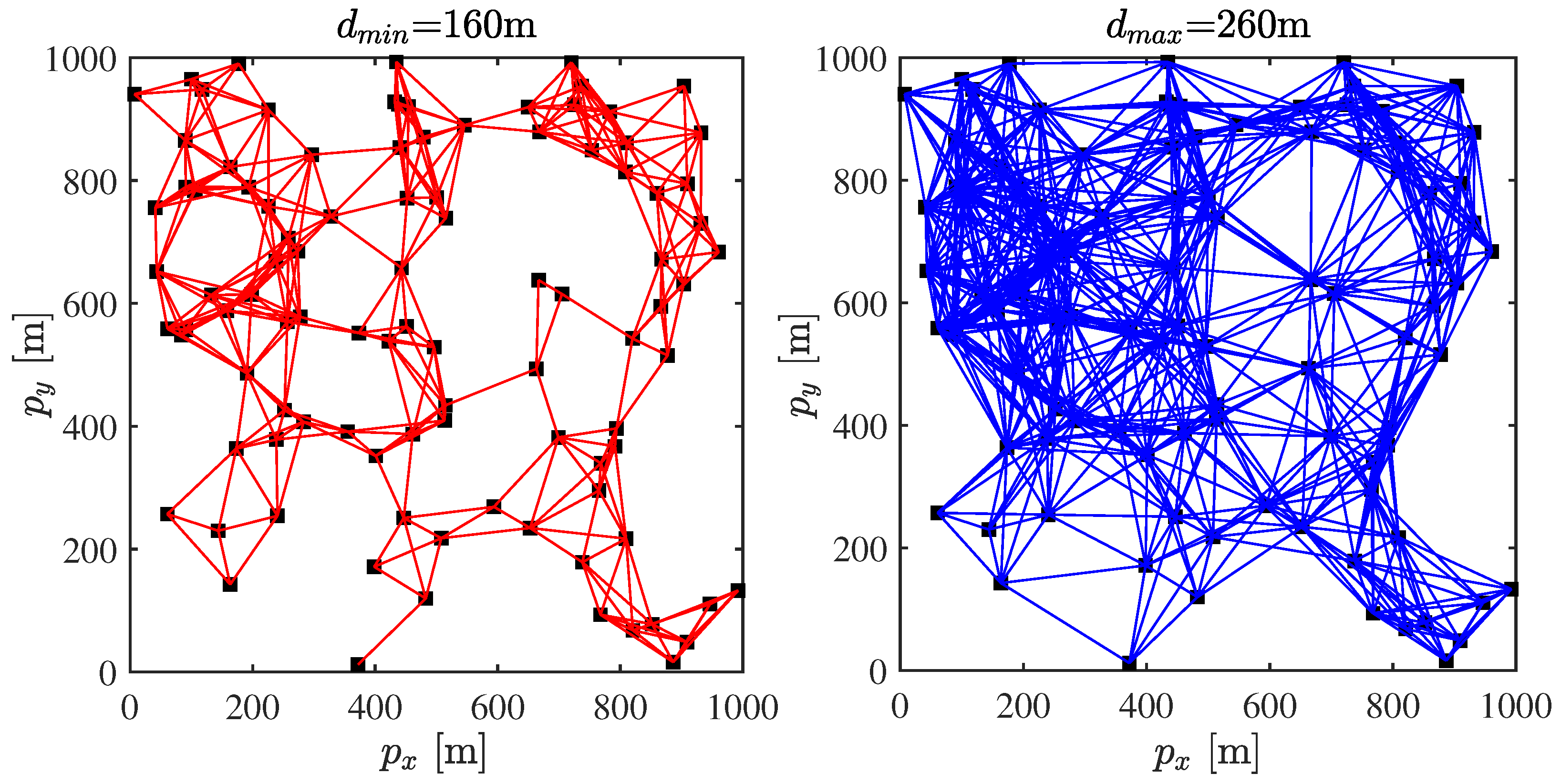
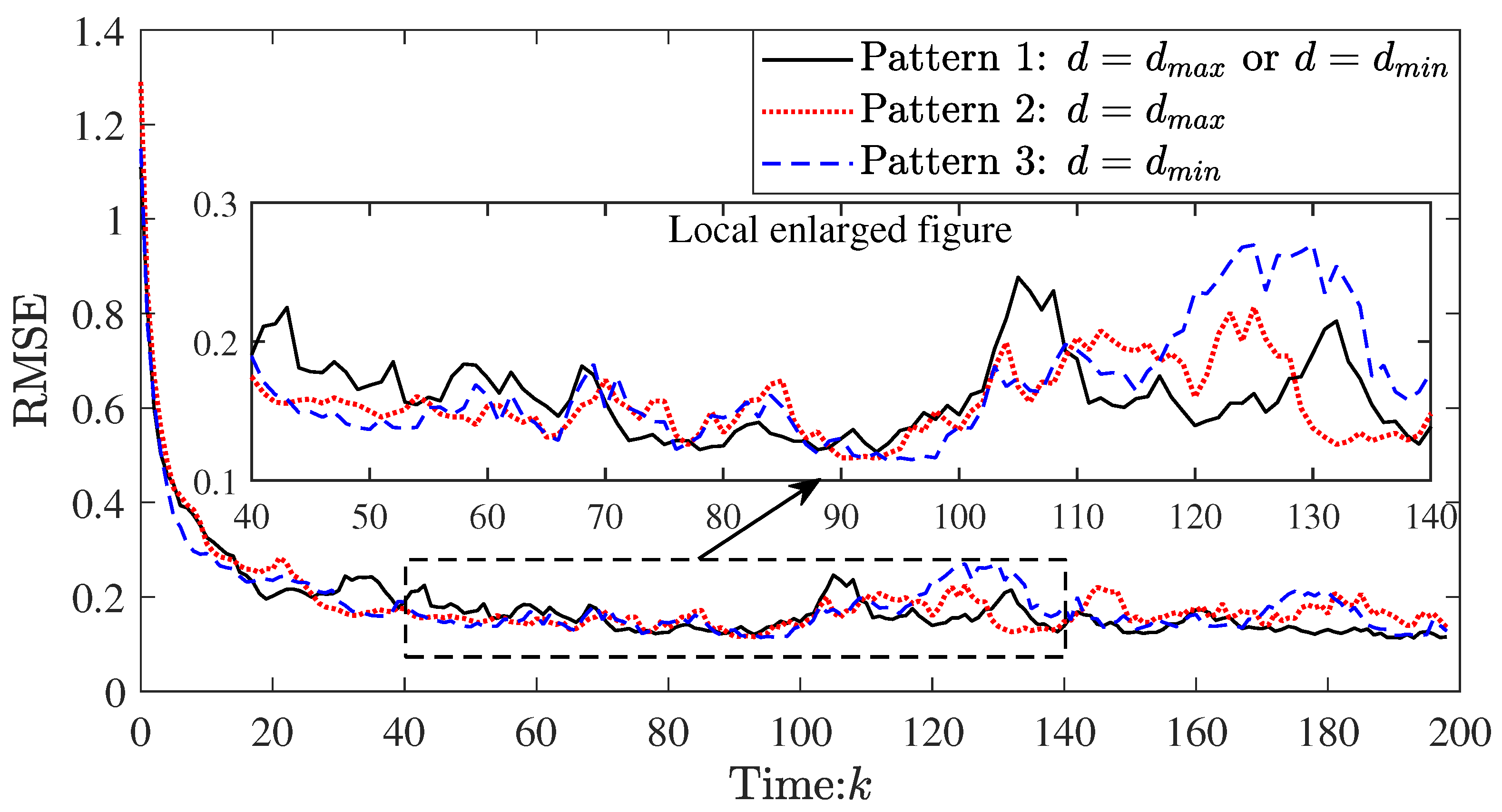
5. Simulations
6. Conclusions
- The unique dual event-driven strategy was designed to balance the filtering accuracy and the energy consumption. Using the proposed dual event-driven strategy, the lifetime of WSNs can be extended by about 40%.
- A novel distributed consensus Kalman filter was designed based on the two schedules; sufficient conditions for the stability of the filter are given.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Mahmoud, M.S.; Khalid, H.M. Distributed Kalman filtering: A bibliographic review. IET Control Theory Appl. 2013, 7, 483–501. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, H.; Han, L.; Tang, P. Sensor selection based on the fisher information of the Kalman filter for target tracking in WSNs. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 383–388. [Google Scholar]
- Ren, W.; Beard, R.W. Consensus seeking in multiagent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 655–661. [Google Scholar] [CrossRef]
- Stankovic, S.; Stankovic, M.; Stipanovic, D. Consensus Based Overlapping Decentralized Estimator. IEEE Trans. Autom. Control 2009, 54, 410–415. [Google Scholar] [CrossRef]
- Alwazani, H.; Chaaban, A. IRS-Enabled Ultra-Low-Power Wireless Sensor Networks: Scheduling and Transmission Schemes. Sensors 2022, 22, 9229. [Google Scholar] [CrossRef]
- Wang, N.C.; Lee, C.Y.; Chen, Y.L.; Chen, C.M.; Chen, Z.Z. An Energy Efficient Load Balancing Tree-Based Data Aggregation Scheme for Grid-Based Wireless Sensor Networks. Sensors 2022, 22, 9303. [Google Scholar] [CrossRef] [PubMed]
- Akyildiz, I.F.; Vuran, M.C. Wireless Sensor Networks; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2010; pp. 1–10. [Google Scholar]
- Liu, Q.; Wang, Z.; He, X.; Zhou, D.H. Event-based recursive distributed filtering over wireless sensor networks. IEEE Trans. Autom. Control 2015, 60, 2470–2475. [Google Scholar] [CrossRef]
- Tabuada, P. Event-Triggered Real-Time Scheduling of Stabilizing Control Tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef]
- Li, W.; Jia, Y.; Du, J. Distributed Kalman consensus filter with intermittent observations. J. Frankl. Inst. 2015, 352, 3764–3781. [Google Scholar] [CrossRef]
- Ji, H.; Lewis, F.L.; Hou, Z.; Mikulski, D. Distributed information-weighted Kalman consensus filter for sensor networks. Automatica 2017, 77, 18–30. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, Z.; He, X.; Zhou, D.H. On Kalman-Consensus Filtering With Random Link Failures Over Sensor Networks. IEEE Trans. Autom. Control 2018, 63, 2701–2708. [Google Scholar] [CrossRef]
- Xu, H.; Bai, X.; Liu, P.; Shi, Y. Hierarchical Fusion Estimation for WSNs with Link Failures Based on Kalman-Consensus Filtering and Covariance Intersection. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5150–5154. [Google Scholar]
- Vazquez-Olguin, M.; Shmaliy, Y.S.; Ibarra-Manzano, O.G. Distributed UFIR Filtering Over WSNs with Consensus on Estimates. IEEE Trans. Ind. Inform. 2020, 16, 1645–1654. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, J.; Congan, X.U.; Wang, C.; Lin, Q.I.; Ding, Z. Distributed consensus state estimation algorithm in asymmetrical networks. Syst. Eng. Electron. 2018, 40, 1917–1925. [Google Scholar]
- Hung, C.W.; Zhuang, Y.D.; Lee, C.H.; Wang, C.C.; Yang, H.H. Transmission Power Control in Wireless Sensor Networks Using Fuzzy Adaptive Data Rate. Sensors 2022, 22, 9963. [Google Scholar] [CrossRef] [PubMed]
- Shahzad, M.W.; Burhan, M.; Ang, L.; Ng, K.C. Energy-water-environment nexus underpinning future desalination sustainability. Desalination 2017, 413, 52–64. [Google Scholar] [CrossRef]
- Li, W.; Zhu, S.; Chen, C.; Guan, X. Distributed consensus filtering based on event-driven transmission for wireless sensor networks. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 6588–6593. [Google Scholar]
- Zhang, X.; Han, Q. Event-based H-infinity filtering for sampled-data systems. Automatica 2015, 51, 55–69. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Selvi, D. Distributed Kalman filtering with data-driven communication. In Proceedings of the 19th International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016; pp. 1042–1048. [Google Scholar]
- Zhang, C.; Jia, Y. Distributed Kalman consensus filter with event-triggered communication: Formulation and stability analysis. J. Frankl. Inst. 2017, 354, 5486–5502. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Selvi, D. A distributed Kalman filter with event-triggered communication and guaranteed stability. Automatica 2018, 93, 75–82. [Google Scholar] [CrossRef]
- Zou, L.; Wang, Z.; Zhou, D. Event-based control and filtering of networked systems. Int. J. Autom. Comput. 2017, 14, 239–253. [Google Scholar] [CrossRef]
- Huang, J.; Shi, D.; Chen, T. Event-Triggered State Estimation With an Energy Harvesting Sensor. IEEE Trans. Autom. Control 2017, 62, 4768–4775. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.L.; Wang, Z. A Threshold-Parameter-Dependent Approach to Designing Distributed Event-Triggered H-infinity Consensus Filters Over Sensor Networks. IEEE Trans. Cybern. 2017, 49, 1148–1159. [Google Scholar] [CrossRef]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Yang, H. Topology Control Mechanisms in Wireless Sensor Networks. Comput. Sci. 2007, 34, 36–38. [Google Scholar]
- Liu, L.F. Overview of Topology Control Algorithms in Wireless Sensor Networks. Comput. Sci. 2008, 35, 6–12. [Google Scholar]
- Chen, H. Mobility Prediction and Energy-balance Topology-control Algorithm for Ad hoc Networks. Comput. Sci. 2013, 40, 111–114. [Google Scholar]
- Xu, W.; Ho, D. Clustered Event-Triggered Consensus Analysis: An Impulsive Framework. IEEE Trans. Ind. Electron. 2016, 63, 7133–7143. [Google Scholar] [CrossRef]
- Ge, X.; Han, Q.L.; Zhang, X.M. Achieving Cluster Formation of Multi-Agent Systems Under Aperiodic Sampling and Communication Delays. IEEE Trans. Ind. Electron. 2018, 65, 3417–3426. [Google Scholar] [CrossRef]
- Zhang, W.; He, Y.; Wan, M.; Kumar, M.; Qiu, T. Research on the energy balance algorithm of WSN based on topology control. EURASIP J. Wirel. Commun. Netw. 2018, 2018, 292–296. [Google Scholar] [CrossRef]
- Tang, Z.; Park, J.H.; Feng, J. Novel Approaches to Pin Cluster Synchronization on Complex Dynamical Networks in Lur’e Forms. Commun. Nonlinear Sci. Numer. Simul. 2018, 57, 422–438. [Google Scholar] [CrossRef]
- Gurumoorthy, S.; Subhash, P.; Pérez de Prado, R.; Wozniak, M. Optimal Cluster Head Selection in WSN with Convolutional Neural Network-Based Energy Level Prediction. Sensors 2022, 22, 9921. [Google Scholar] [CrossRef]
- Wu, M.; Li, Z.; Chen, J.; Min, Q.; Lu, T. A Dual Cluster-Head Energy-Efficient Routing Algorithm Based on Canopy Optimization and K-Means for WSN. Sensors 2022, 22, 9731. [Google Scholar] [CrossRef]
- Berrachedi, A.; Boukala-Ioualalen, M. Evaluation of the Energy Consumption and the Packet Loss in WSNs Using Deterministic Stochastic Petri Nets. In Proceedings of the 2016 30th International Conference on Advanced Information Networking and Applications Workshops (WAINA), Crans-Montana, Switzerland, 23–25 March 2016; pp. 772–777. [Google Scholar] [CrossRef]
- DanSimon. Optimal State Estimation-Kalman, H_inf and Nonlinear Approaches; John Wiley & Sons Limited: Hoboken, NJ, USA, 2013; pp. 89–101. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| The state of the monitored object at the k instance | |
| The prior estimate of the system state for node i at the k instance | |
| The posterior estimate of the system state for node i at the k instance | |
| The covariance matrix of the prior estimate error for node i at the k instance | |
| The covariance matrix of the posterior estimate for node i at the k instance | |
| The system noise at the k instance | |
| The output of the i-th sensor node at the k instance | |
| The measurement noise of the i-th sensor at the k instance | |
| Q | The covariance matrix of the system noise |
| The covariance matrix measurement noise of the i-th sensor at the k instance | |
| The Kalman gain of the i-th sensor at the k instance | |
| The consensus gain of the i-th sensor at the k instance | |
| The timeliness period | |
| The set of timeliness neighbors of node i | |
| The set of real-time neighbors of node i | |
| The set of effective neighbors of node i | |
| The event-triggered threshold | |
| The difference between the last event-triggered time of node i and the current | |
| The energy consumed by the sender | |
| The energy consumed by the receiver | |
| The total energy consumption of node i in a data fusion process | |
| The local average energy of node i at the k instance | |
| The communication radius of node i at the k instance | |
| The packet loss rate in WSNs |
| Acronym | Definition |
|---|---|
| WSNs | Wireless sensor networks |
| TW | Timeliness window |
| RN | Real-time neighbor |
| EN | Effective neighbor |
| RMSE | Root mean square error |
| TEF | Total event-triggered frequency |
| Parameters | l | ||||
|---|---|---|---|---|---|
| Value | 0.8 | 5 | 0.3 | 40,000 bit | 200 m |
| 50 nJ/bit | 5 nJ/(bit·signal) | 10 pJ/(bit) | 0.0013 pJ/(bit) |
| Parameter | ||||
|---|---|---|---|---|
| Performance | ||||
| RMSE | 0.2003 | 0.1982 | 0.1968 | |
| Lifetime | 198 | 190 | 185 | |
| TEF | 522 | 581 | 604 | |
| Parameter | ||||
|---|---|---|---|---|
| Performance | ||||
| RMSE | 0.1861 | 0.2034 | 0.2133 | |
| Lifetime | 182 | 193 | 200 | |
| TEF | 746 | 654 | 514 | |
| Parameter | ||||
|---|---|---|---|---|
| Performance | ||||
| RMSE | 0.1925 | 0.1836 | 0.2365 | |
| Lifetime | 186 | 200 | 167 | |
| TEF | 584 | 521 | 659 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Li, G.; Gao, G.; Shi, Q. Distributed Consensus Kalman Filter Design with Dual Energy-Saving Strategy: Event-Triggered Schedule and Topological Transformation. Sensors 2023, 23, 3261. https://doi.org/10.3390/s23063261
Yang C, Li G, Gao G, Shi Q. Distributed Consensus Kalman Filter Design with Dual Energy-Saving Strategy: Event-Triggered Schedule and Topological Transformation. Sensors. 2023; 23(6):3261. https://doi.org/10.3390/s23063261
Chicago/Turabian StyleYang, Chunxi, Gengen Li, Guanbin Gao, and Qinghua Shi. 2023. "Distributed Consensus Kalman Filter Design with Dual Energy-Saving Strategy: Event-Triggered Schedule and Topological Transformation" Sensors 23, no. 6: 3261. https://doi.org/10.3390/s23063261
APA StyleYang, C., Li, G., Gao, G., & Shi, Q. (2023). Distributed Consensus Kalman Filter Design with Dual Energy-Saving Strategy: Event-Triggered Schedule and Topological Transformation. Sensors, 23(6), 3261. https://doi.org/10.3390/s23063261