
A High–Efficiency Side–Scan Sonar Simulator for High–Speed Seabed Mapping


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- A two–level network architecture is developed, which can reasonably modularize the cumbersome simulation process to form a flexible operational network. It can support mainstream SSS engineering as well as module expansion for future research directions, thus being more advanced than the current open–source solutions.
- Different from the conventional sonar simulator using a stop&hop path model, an echo signal fitting algorithm based on the polyline path model is proposed, which can restore accurate propagation parameters of the backscattered signal to adapt the high–speed mapping simulation. Moreover, the Doppler effect is also accounted to achieve high–fidelity echo calculations.
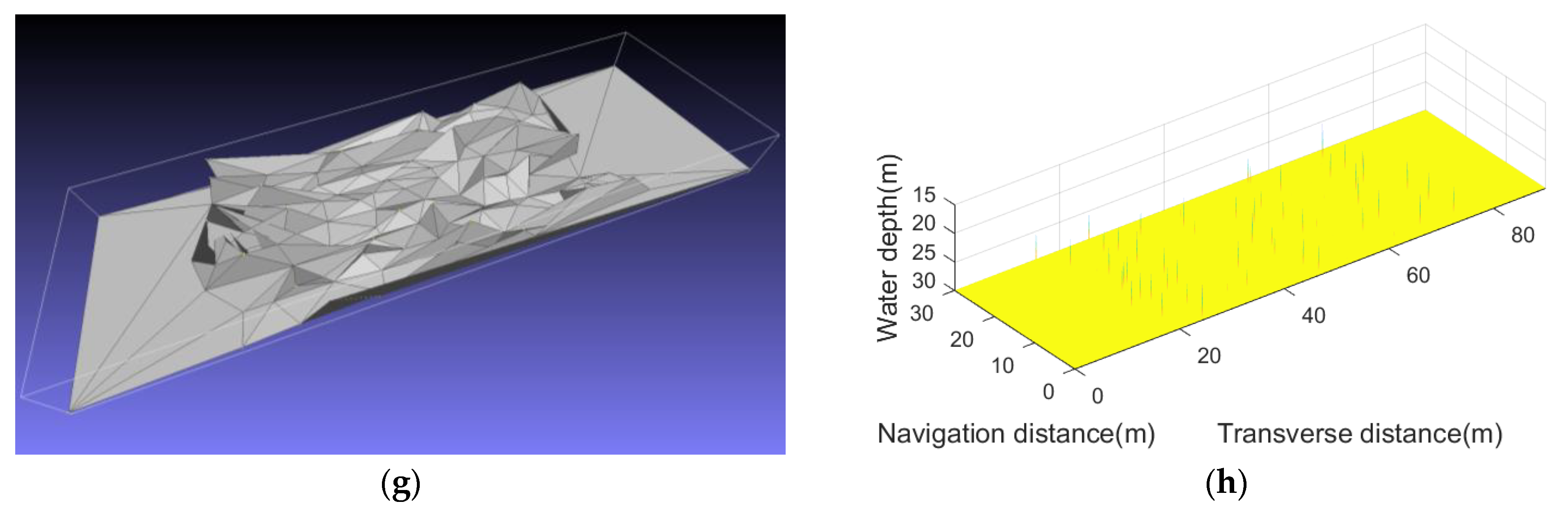
- Avoiding the disadvantages of graphics rendering technology, more efficient point cloud is fully applied instead of redundant TMs. A modeling simplification algorithm based on a new energy function is proposed, which fully considers the acoustic principle and identifies the model structure sensitive to underwater acoustic signals, and then eliminates the low–value scattering points to accelerate the simulation performance on a large–scale virtual seabed.
2. Sonar Simulator Framework Based on a Two–Level Network Architecture
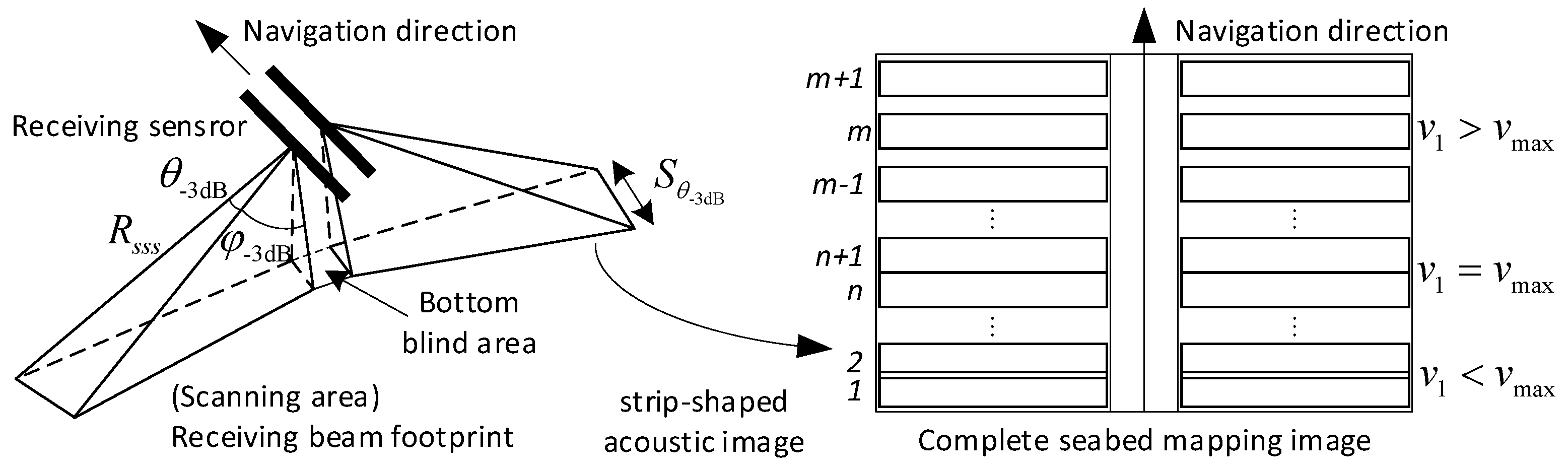
2.1. Sonar Principle
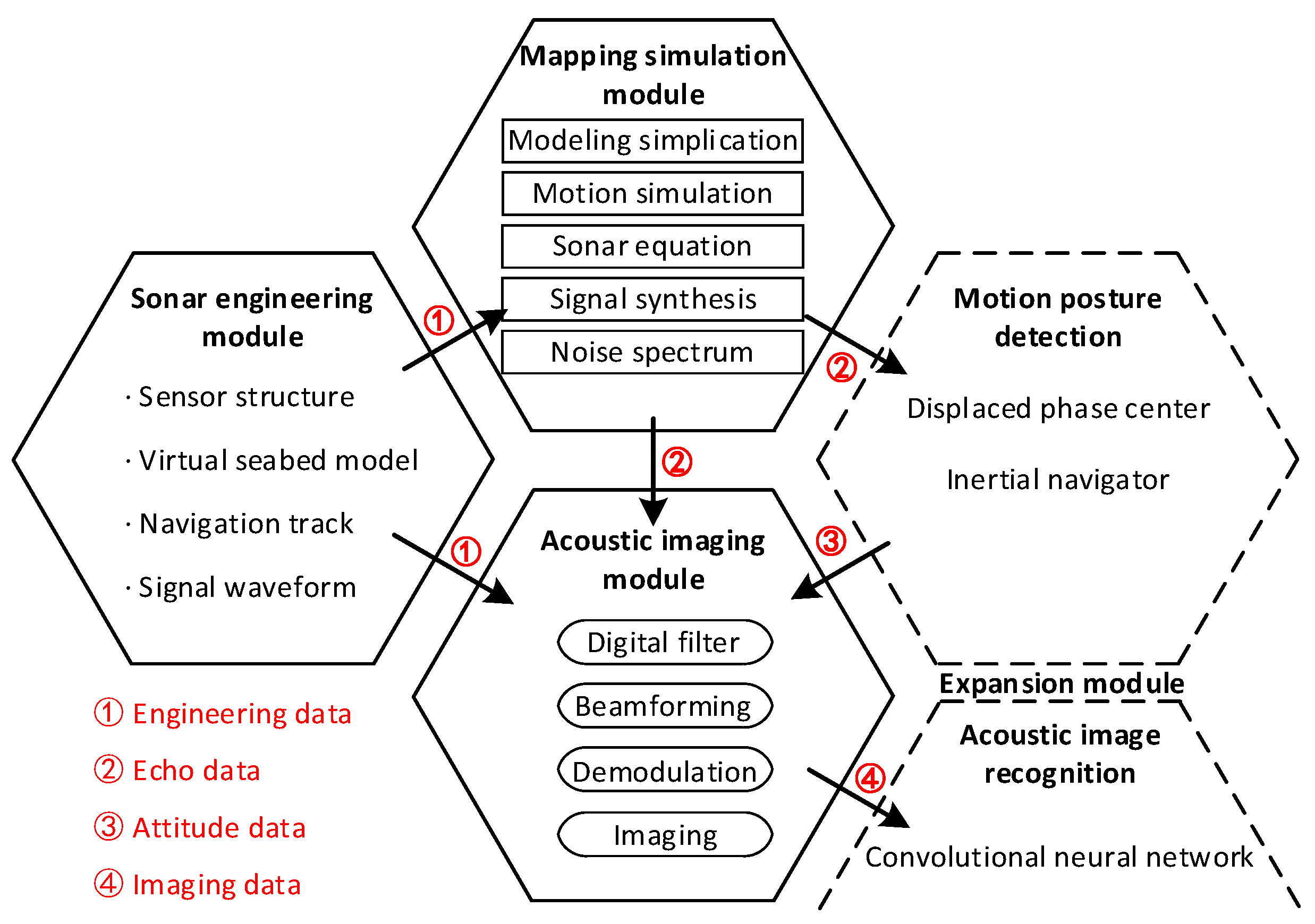
2.2. Two–Level Network Architecture
3. Echo Signal Fitting Algorithm for High–Speed Mapping
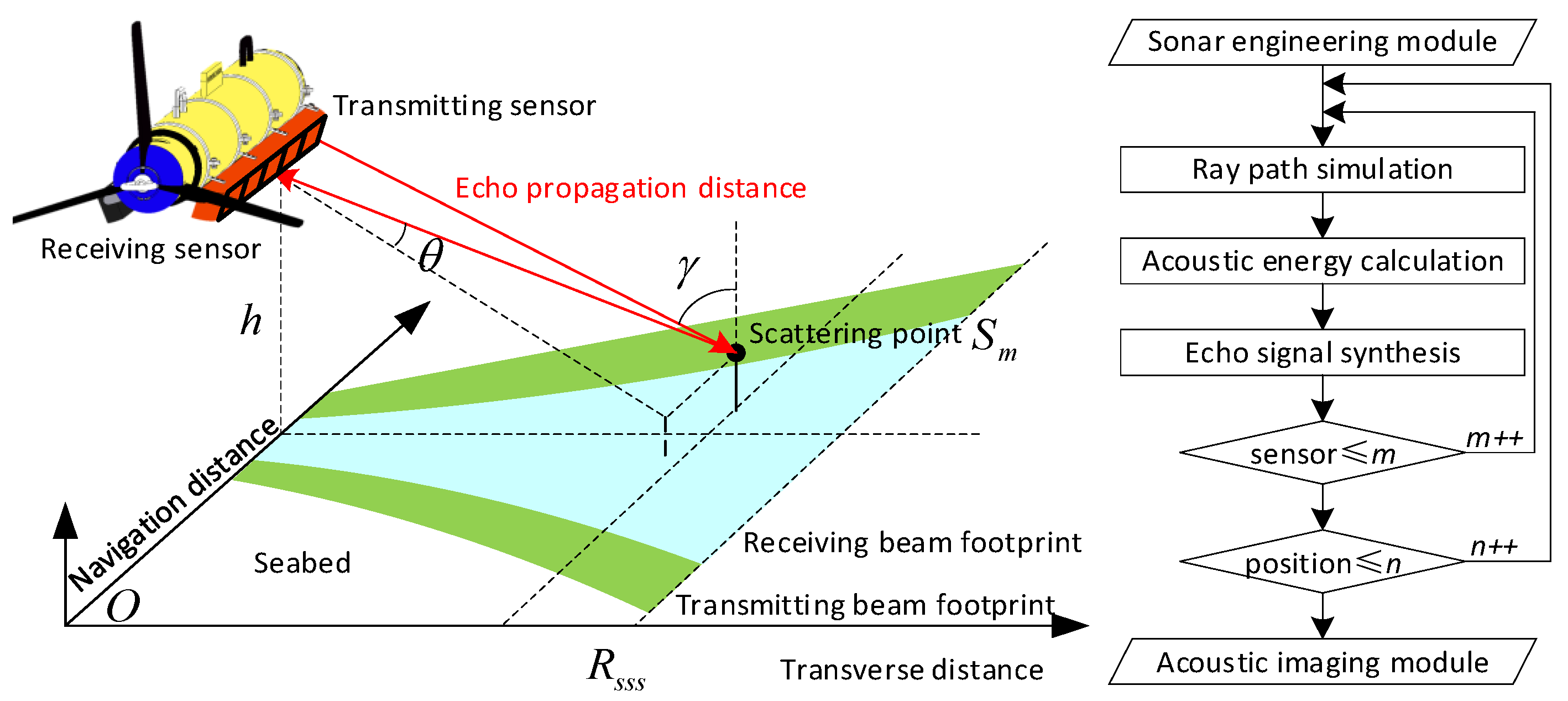
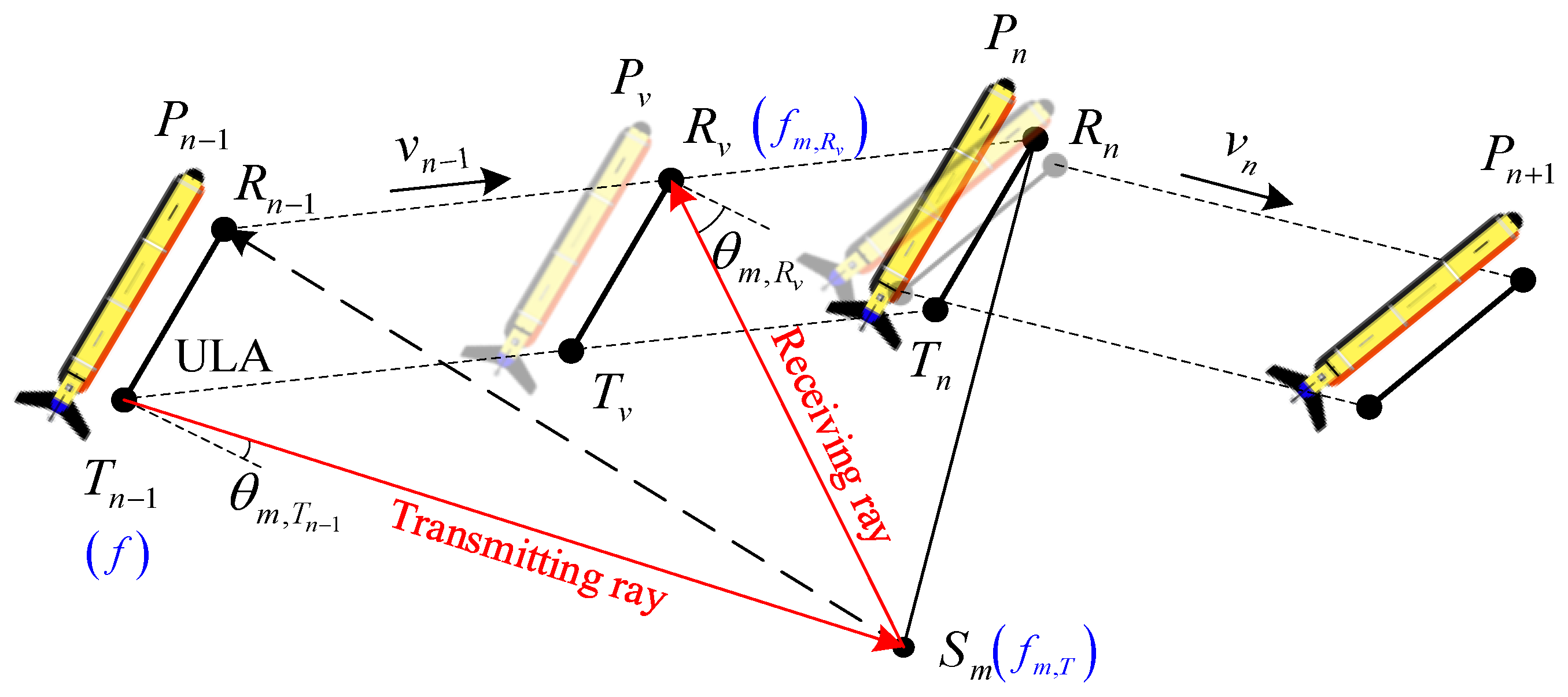
3.1. Polyline Path Model
3.2. Echo Signal Fitting
3.2.1. Amplitude Calculation
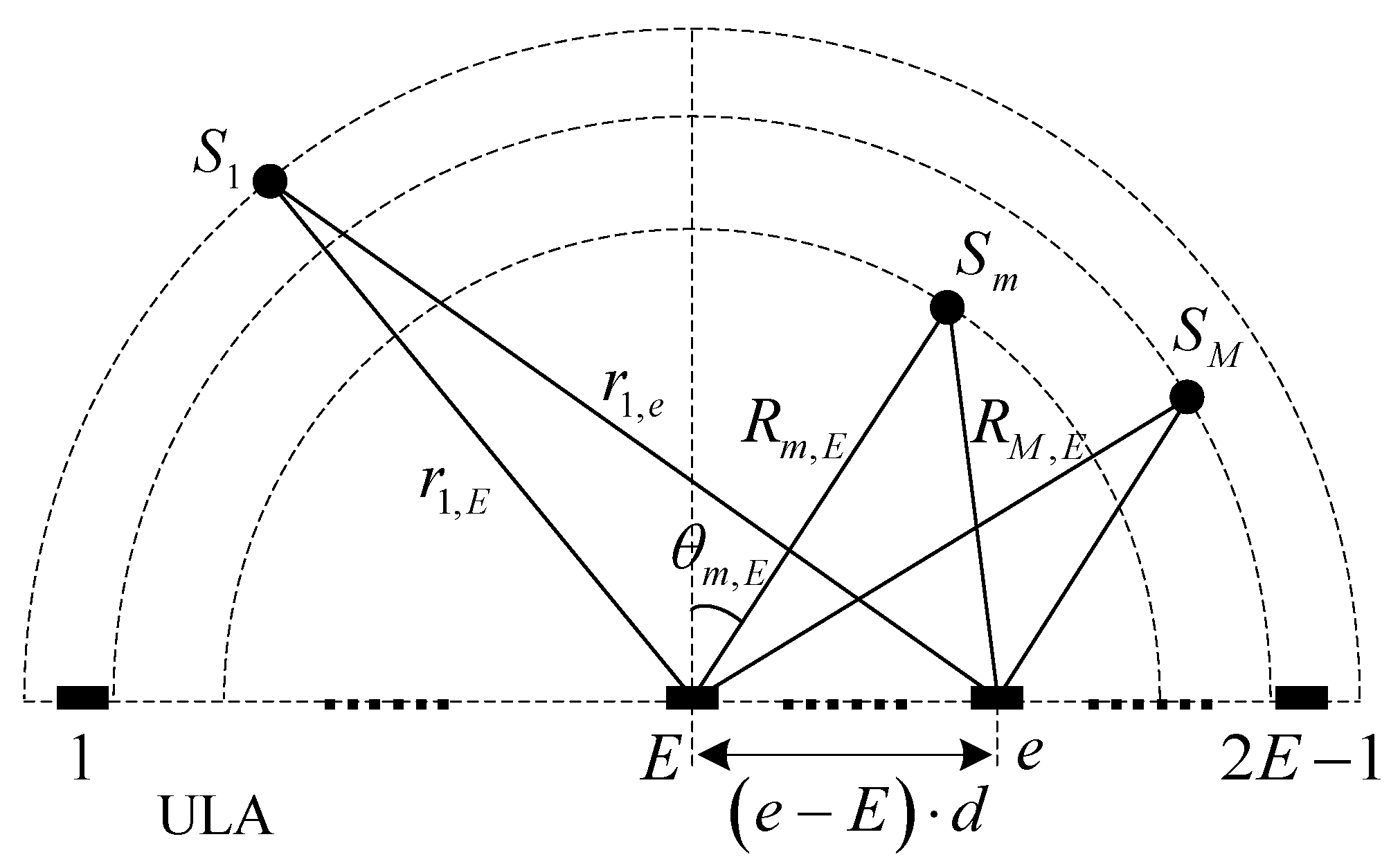
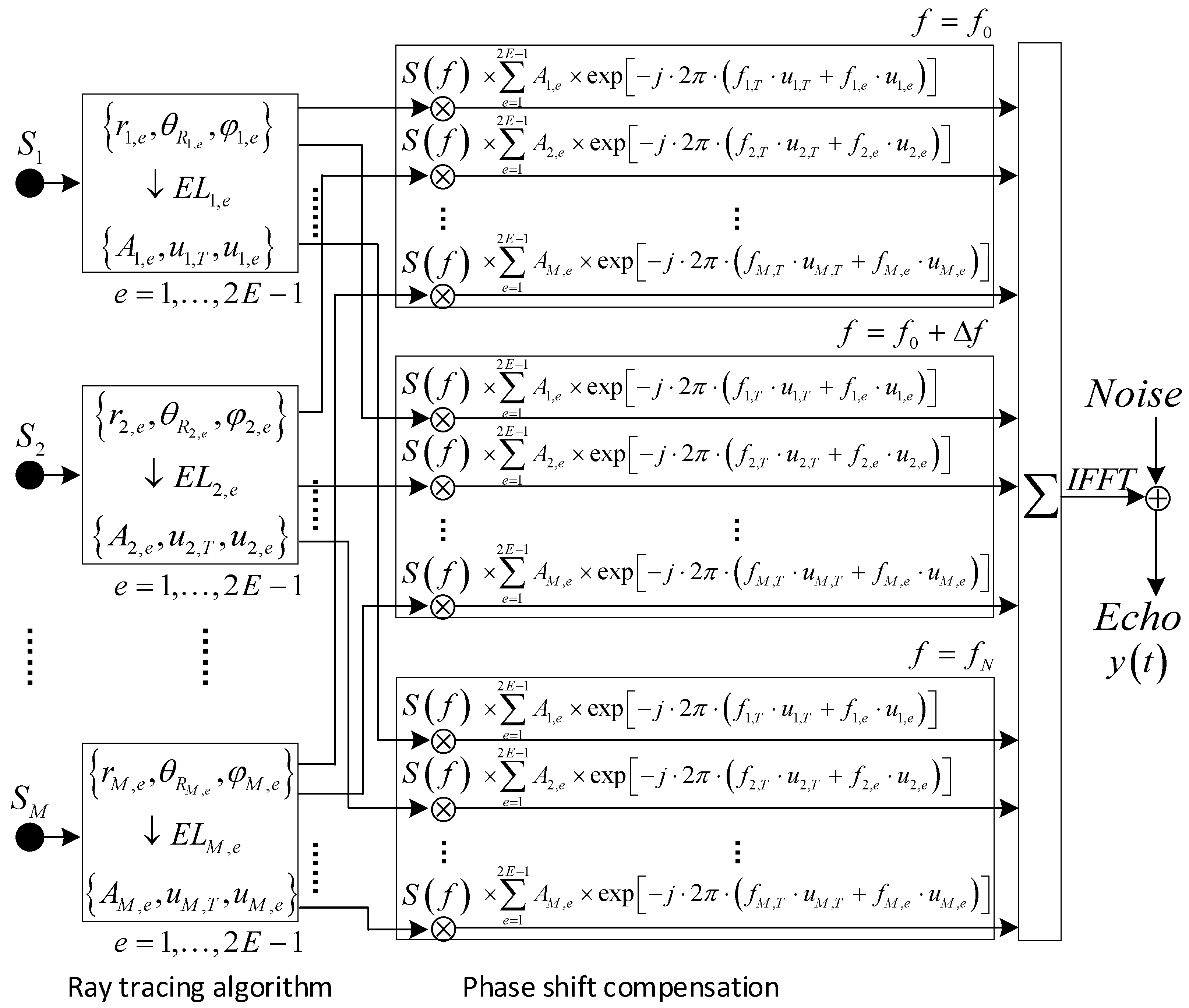
3.2.2. Array Signal Model
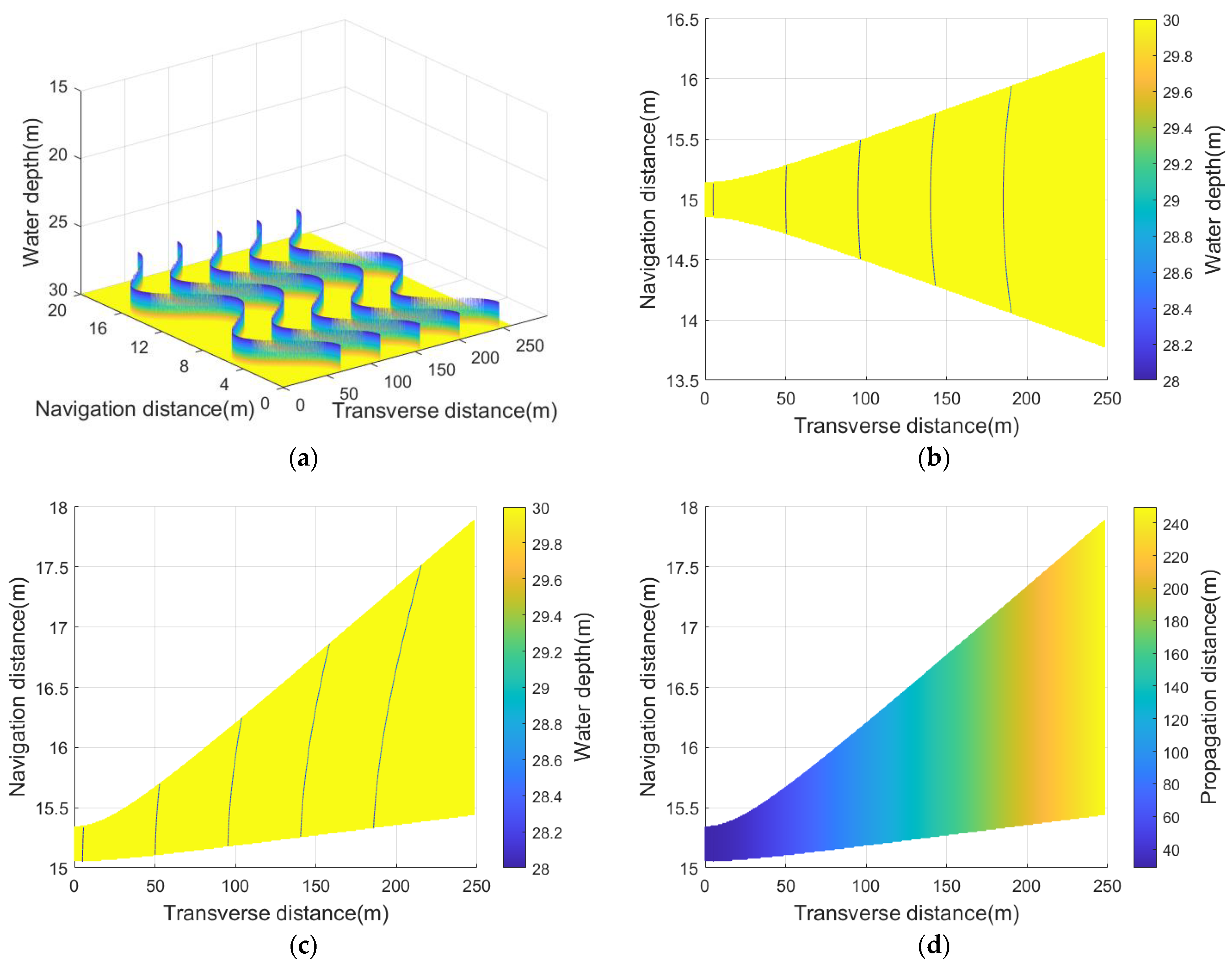
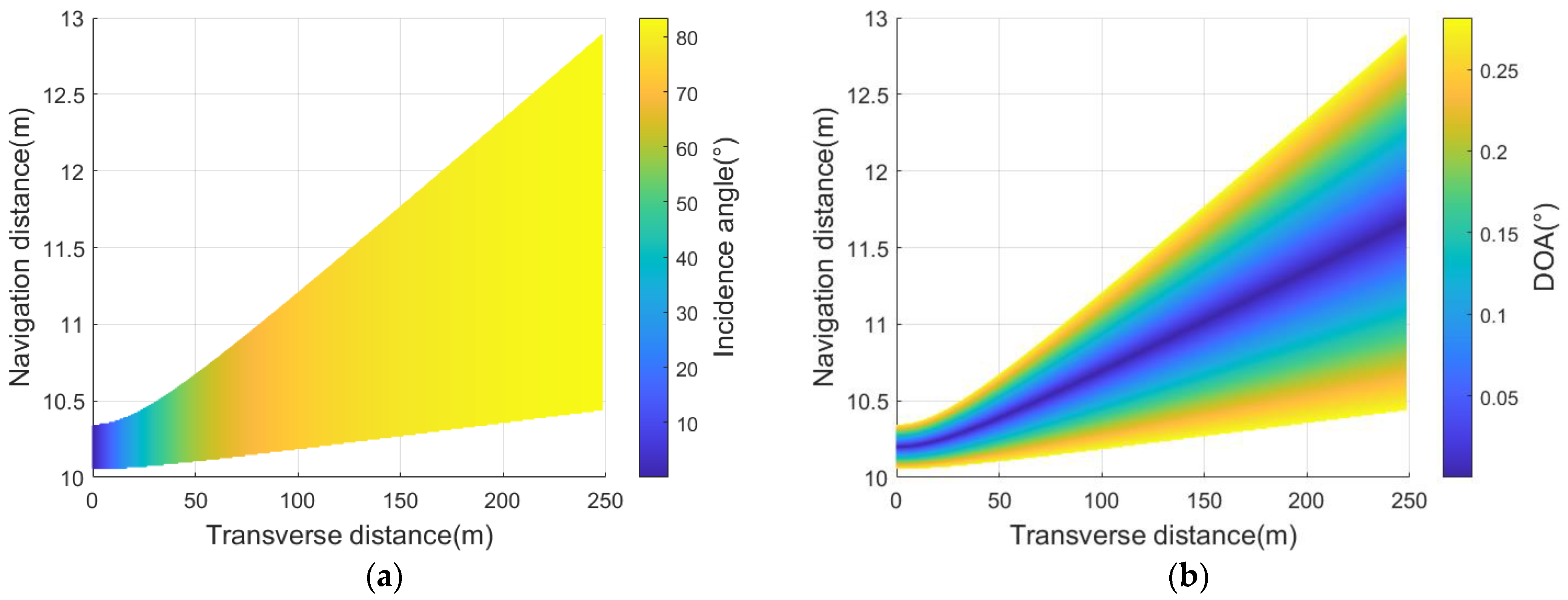
3.3. Simulation Experiment
4. Modeling Simplification Based on a New Energy Function
4.1. Conventional Energy Function
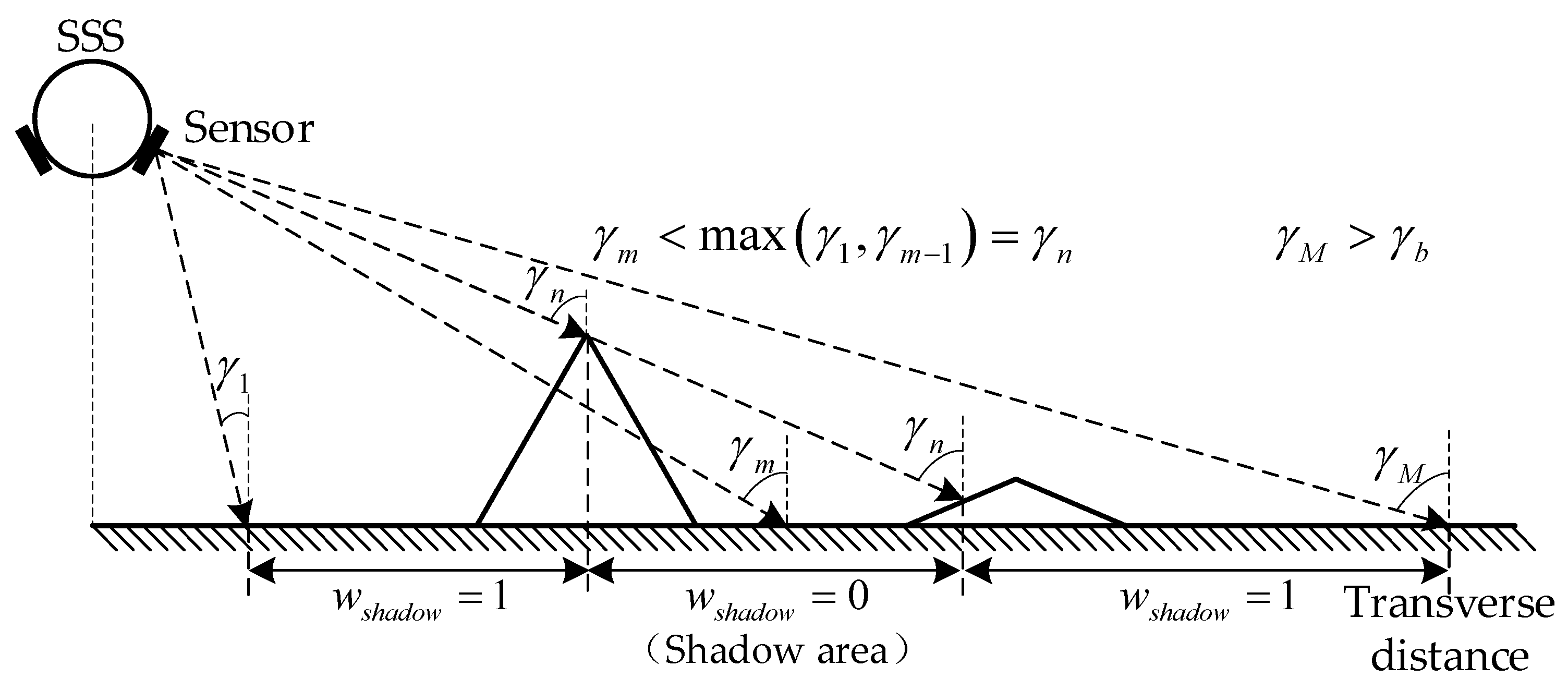
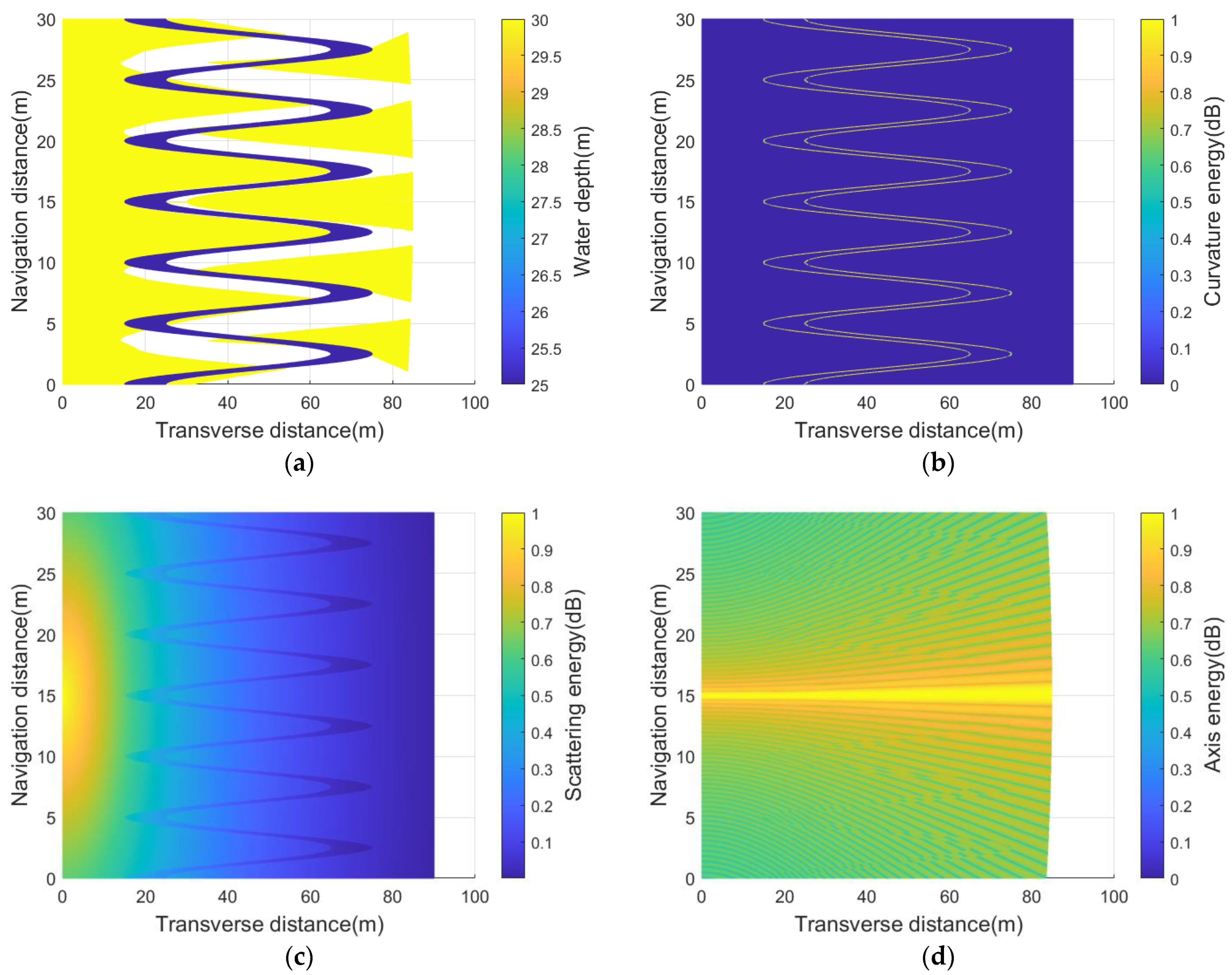
4.2. A New Energy Function Focusing on Acoustics
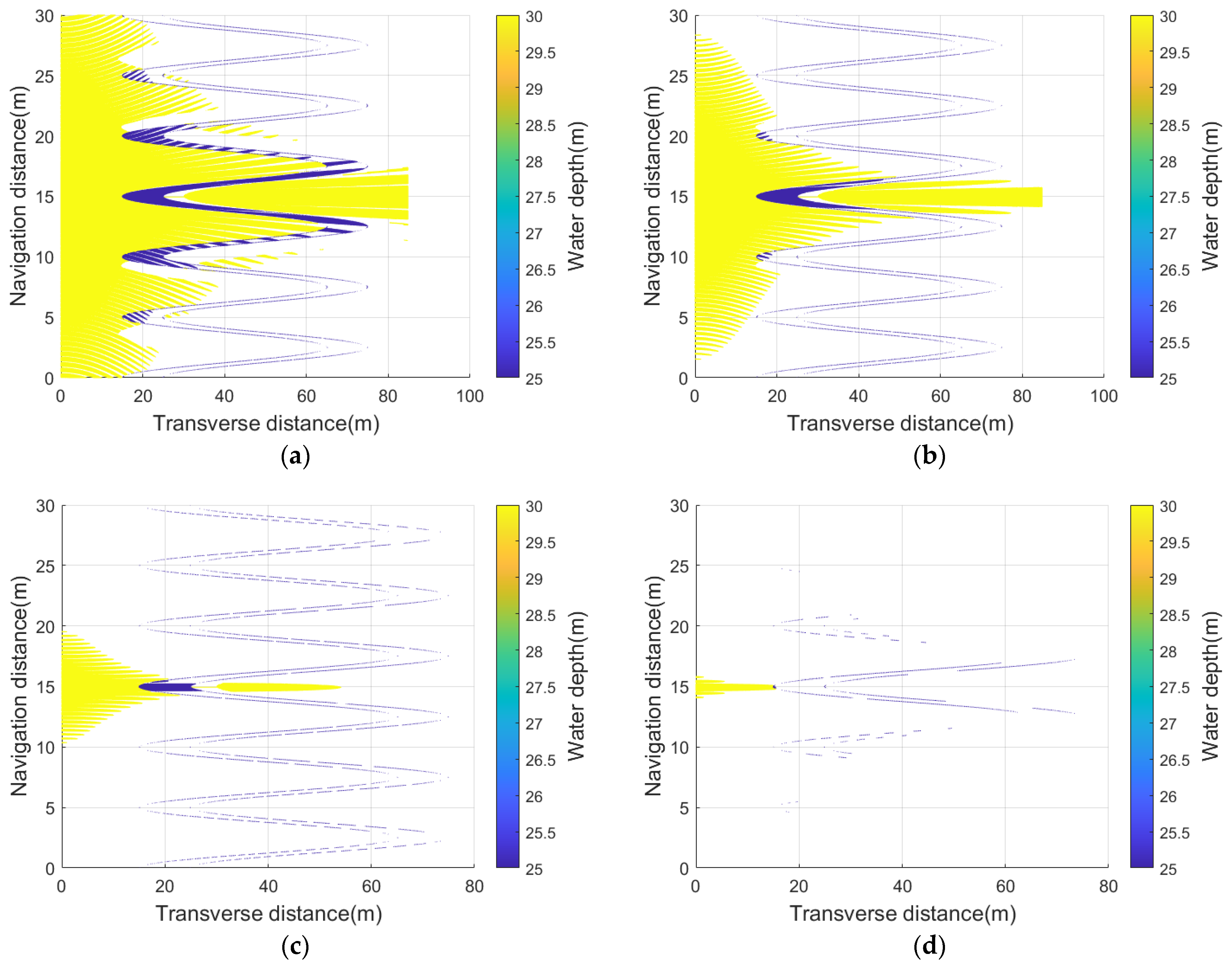
4.3. Simulation Experiment
5. Comparative Analysis of Simulation and Actual Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Q.; Wu, M.; Yu, F.; Feng, C.; Li, K.; Zhu, Y.; Rigall, E.; He, B. RT–Seg: A Real–Time Semantic Segmentation Network for Side–Scan Sonar Images. Sensors 2019, 19, 1985. [Google Scholar] [CrossRef] [PubMed]
- Stenius, I.; Folkesson, J.; Bhat, S.; Sprague, C.I.; Ling, L.; Özkahraman, Ö.; Bore, N.; Cong, Z.; Severholt, J.; Ljung, C. A system for autonomous seaweed farm inspection with an underwater robot. Sensors 2022, 22, 5064. [Google Scholar] [CrossRef] [PubMed]
- Rosynski, M.; Buşoniu, L. A Simulator and First Reinforcement Learning Results for Underwater Mapping. Sensors 2022, 22, 5384. [Google Scholar] [CrossRef]
- Sun, S.; Qin, S.; Hao, Y.; Zhang, G.; Zhao, C. Underwater acoustic localization of the black box based on generalized second–order time difference of arrival (GSTDOA). IEEE Trans. Geosci. Remote Sens. 2020, 59, 7245–7255. [Google Scholar] [CrossRef]
- Pan, X.; Shen, Y.; Zhang, J. IoUT based underwater target localization in the presence of time synchronization attacks. IEEE Trans. Wirel. Commun. 2021, 20, 3958–3973. [Google Scholar] [CrossRef]
- Bouxsein, P.; An, E.; Schock, S.; Beaujean, P.-P. A SONAR Simulation Used to Develop an Obstacle Avoidance System. In Proceedings of the OCEANS 2006–Asia Pacific, Singapore, 16–19 May 2006; pp. 1–7. [Google Scholar]
- Sung, M.; Lee, M.; Kim, J.; Song, S.; Song, Y.-w.; Yu, S.-C. Convolutional–Neural–Network–Based Underwater Object Detection Using Sonar Image Simulator with Randomized Degradation. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; pp. 1–7. [Google Scholar]
- Sac, H.; Leblebicioğlu, K.; Bozdaği Akar, G. 2D high–frequency forward–looking sonar simulator based on continuous surfaces approach. Turk. J. Electr. Eng. Comput. Sci. 2015, 23, 2289–2303. [Google Scholar] [CrossRef]
- Coiras, E.; Ramirez–Montesinos, A.; Groen, J. GPU–based simulation of side–looking sonar images. In Proceedings of the OCEANS 2009–EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–6. [Google Scholar]
- Gu, J.; Joe, H.; Yu, S. Development of Image Sonar Simulator for Underwater Object Recognition. In Proceedings of the 2013 OCEANS–San Diego, San Diego, CA, USA, 23–27 September 2013; pp. 1–6. [Google Scholar]
- Bell, J.M.; Linnett, L. Simulation and analysis of synthetic sidescan sonar images. IEEE Proc. Radar Sonar Navig. 1997, 144, 219–226. [Google Scholar] [CrossRef]
- Riordan, J.; Omerdic, E.; Toal, D. Implementation and Application of a Real–Time Sidescan Sonar Simulator. In Proceedings of the Europe Oceans 2005, Brest, France, 20–23 June 2005; pp. 981–986. [Google Scholar]
- Hamann, B. A data reduction scheme for triangulated surfaces. Comput. Aided Geom. Des. 1994, 11, 197–214. [Google Scholar] [CrossRef]
- Schroeder, W.J.; Zarge, J.A.; Lorensen, W.E. Decimation of Triangle Meshes. In Proceedings of the the 19th Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 26–30 July 1992; pp. 65–70. [Google Scholar]
- Fanous, M.; Gold, S.; Muller, S.; Hirsch, S.; Ogorka, J.; Imanidis, G. Simplification of fused deposition modeling 3D–printing paradigm: Feasibility of 1–step direct powder printing for immediate release dosage form production. Int. J. Pharm. 2020, 578, 119–124. [Google Scholar] [CrossRef]
- Li, H.; Li, Y.; Yu, R.; Sun, J.; Kim, J. Surface reconstruction from unorganized points with l0 gradient minimization. Comput. Vis. Image Underst. 2018, 169, 108–118. [Google Scholar] [CrossRef]
- Liu, W.; Zhang, C.; Liu, J. Research on synthetic aperture sonar 3–D data simulation. J. Syst. Simul. 2008, 20, 3838–3841. [Google Scholar]
- Johnson, H.P.; Helferty, M. The geological interpretation of side–scan sonar. Rev. Geophys. 1990, 28, 357–380. [Google Scholar] [CrossRef]
- Zhang, N.; Jin, S.; Bian, G.; Cui, Y.; Chi, L. A Mosaic Method for Side–Scan Sonar Strip Images Based on Curvelet Transform and Resolution Constraints. Sensors 2021, 21, 6044. [Google Scholar] [CrossRef]
- Nian, R.; Zang, L.; Geng, X.; Yu, F.; Ren, S.; He, B.; Li, X. Towards characterizing and developing formation and migration cues in seafloor sand waves on topology, morphology, evolution from high–resolution mapping via side–scan sonar in autonomous underwater vehicles. Sensors 2021, 21, 3283. [Google Scholar] [CrossRef]
- Grabek, J.; Cyganek, B. Speckle noise filtering in side–scan sonar images based on the tucker tensor decomposition. Sensors 2019, 19, 2903. [Google Scholar] [CrossRef] [PubMed]
- Chang, Y.; Keh, J.-E.; Jo, H.-G.; Lee, M. Development of the Side Scan Sonar Using the Multi–Beam Sensors: Sensor Design. Trans. Korean Inst. Electr. Eng. 2005, 54, 581–586. [Google Scholar]
- Crocco, M.; Pellegretti, P.; Sciallero, C.; Trucco, A. Combining multi–pulse excitation and chirp coding in contrast–enhanced ultrasound imaging. Meas. Sci. Technol. 2009, 20, 104–107. [Google Scholar] [CrossRef]
- Ageev, A.; Igumnov, G.; Kostousov, V.; Agafonov, I.; Zolotorev, V.; Madison, E. Aperture synthesizing for multichannel side–scan sonar with compensation of trajectory instability. Izv. SFedU. Eng. Sci. 2013, 140, 140–148. [Google Scholar]
- Pailhas, Y.; Petillot, Y.; Capus, C.; Brown, K. Real–Time Sidescan Simulator and Applications. In Proceedings of the OCEANS 2009–EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–6. [Google Scholar]
- Reshetov, A.; Soupikov, A.; Hurley, J. Multi–level ray tracing algorithm. ACM Trans. Graph. 2005, 24, 1176–1185. [Google Scholar] [CrossRef]
- Lehnert, H. Systematic errors of the ray–tracing algorithm. Appl. Acoust. 1993, 38, 207–221. [Google Scholar] [CrossRef]
- Yun, Z.; Iskander, M.F. Ray tracing for radio propagation modeling: Principles and applications. IEEE Access 2015, 3, 1089–1100. [Google Scholar] [CrossRef]
- Wang, X.; Wang, L.; Li, G.; Xie, X. A robust and fast method for sidescan sonar image segmentation based on region growing. Sensors 2021, 21, 6960. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Chen, X.; Qu, W. Influence of the stop–and–hop assumption on synthetic aperture sonar imagery. In Proceedings of the 2017 IEEE 17th International Conference on Communication Technology (ICCT), Chengdu, China, 27–30 October 2017; pp. 1601–1607. [Google Scholar]
- Grall, P.; Kochanska, I.; Marszal, J. Direction–of–Arrival Estimation Methods in Interferometric Echo Sounding. Sensors 2020, 20, 3556. [Google Scholar] [CrossRef] [PubMed]
- Gueriot, D.; Sintes, C.; Garello, R. Sonar data simulation based on tube tracing. In Proceedings of the OCEANS 2007–Europe, Aberdeen, UK, 18–21 June 2007; pp. 1–6. [Google Scholar]
- Grimmett, D.; Coraluppi, S. Contact–level multistatic sonar data simulator for tracker performance assessment. In Proceedings of the 2006 9th International Conference on Information Fusion, Florence, Italy, 10–13 July 2006; pp. 1–7. [Google Scholar]
- Brigham, E.O.; Morrow, R. The fast Fourier transform. IEEE Spectr. 1967, 4, 80–111. [Google Scholar] [CrossRef]
- Marszal, J.; Salamon, R.; Zachariasz, K.; Schmidt, A. Doppler effect in the cw fm sonar. Hydroacoustics 2011, Nr 14, 157–164. [Google Scholar]
- Gough, P. A synthetic aperture sonar system capable of operating at high speed and in turbulent media. IEEE J. Ocean. Eng. 1986, 11, 333–339. [Google Scholar] [CrossRef]
- Hoppe, H. Progressive meshes. In Proceedings of the the 23rd annual conference on Computer graphics and interactive techniques, New York, NY, USA, 1 August 1996; pp. 99–108. [Google Scholar]
- Battaglia, C.; Boccard, M.; Haug, F.-J.; Ballif, C. Light trapping in solar cells: When does a Lambertian scatterer scatter Lambertianly? J. Appl. Phys. 2012, 112, 094504. [Google Scholar] [CrossRef]
- Zhan, D.; Wang, S.; Cai, S.; Zheng, H.; Xu, W. Acoustic localization with multi–layer isogradient sound speed profile using TDOA and FDOA. Front. Inf. Technol. Electron. Eng. 2023, 24, 164–175. [Google Scholar] [CrossRef]





















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meng, X.; Xu, W.; Shen, B.; Guo, X. A High–Efficiency Side–Scan Sonar Simulator for High–Speed Seabed Mapping. Sensors 2023, 23, 3083. https://doi.org/10.3390/s23063083
Meng X, Xu W, Shen B, Guo X. A High–Efficiency Side–Scan Sonar Simulator for High–Speed Seabed Mapping. Sensors. 2023; 23(6):3083. https://doi.org/10.3390/s23063083
Chicago/Turabian StyleMeng, Xiangjian, Wen Xu, Binjian Shen, and Xinxin Guo. 2023. "A High–Efficiency Side–Scan Sonar Simulator for High–Speed Seabed Mapping" Sensors 23, no. 6: 3083. https://doi.org/10.3390/s23063083
APA StyleMeng, X., Xu, W., Shen, B., & Guo, X. (2023). A High–Efficiency Side–Scan Sonar Simulator for High–Speed Seabed Mapping. Sensors, 23(6), 3083. https://doi.org/10.3390/s23063083