A dToF Ranging Sensor with Accurate Photon Detector Measurements for LiDAR Applications


Abstract
:1. Introduction
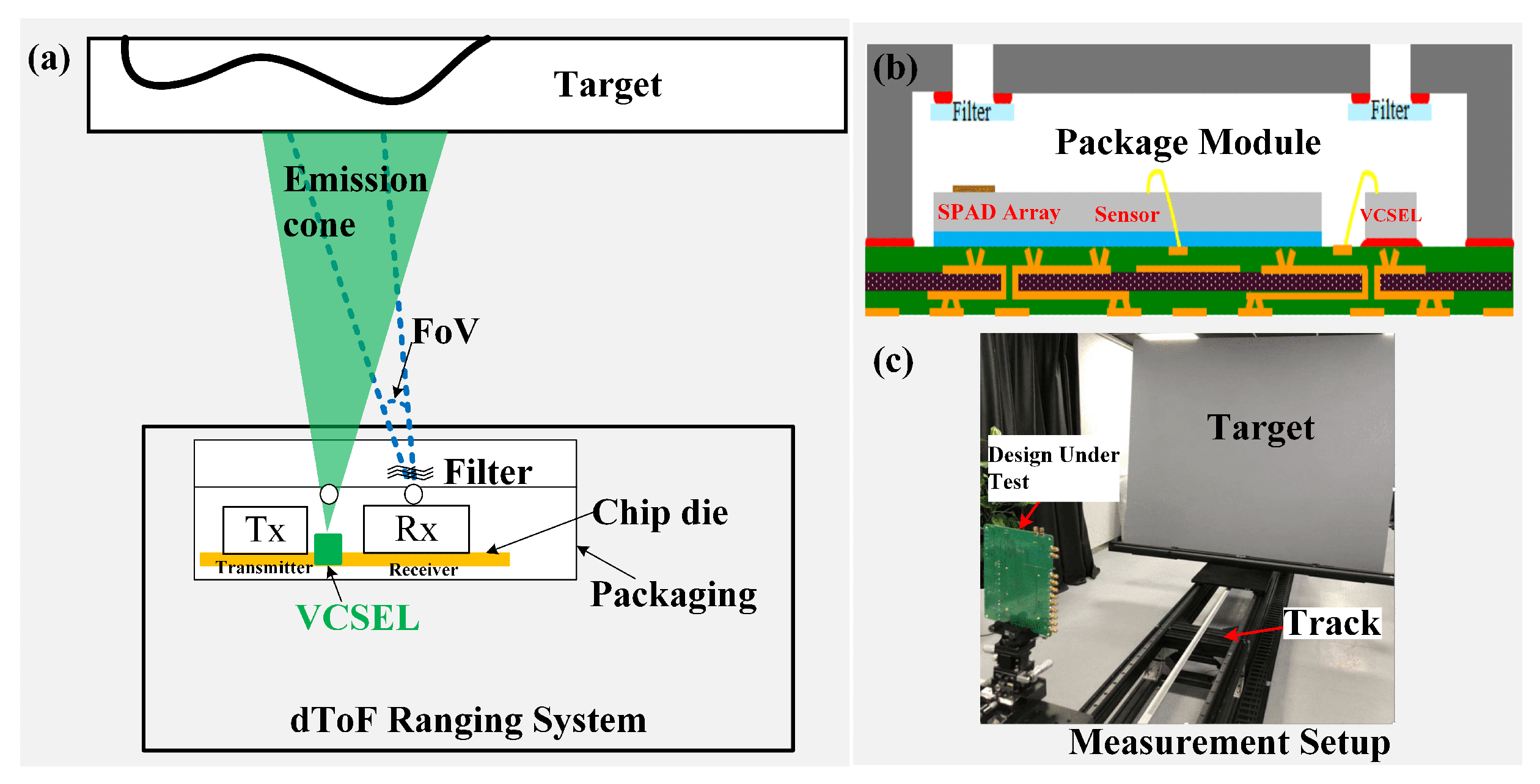
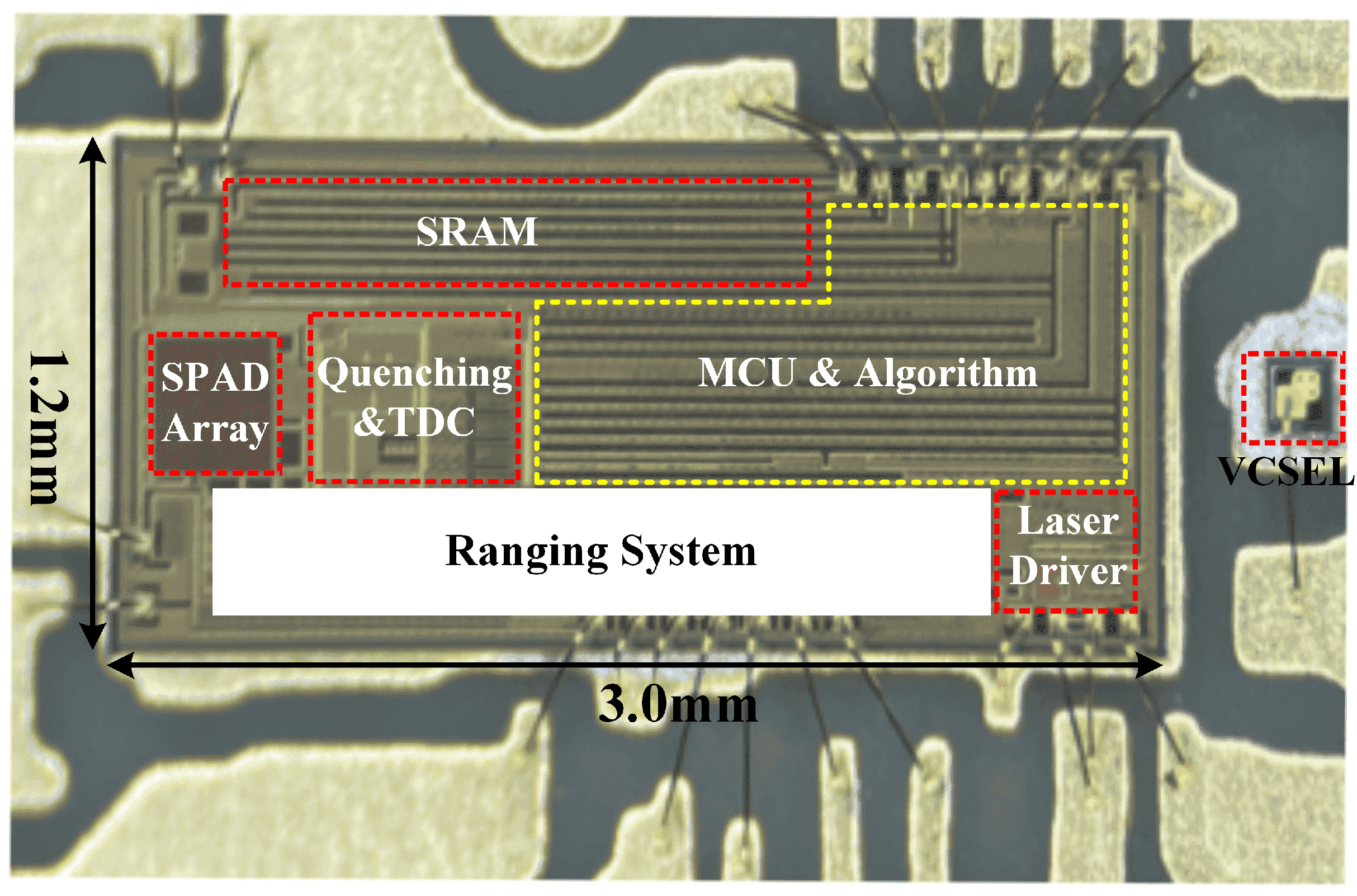
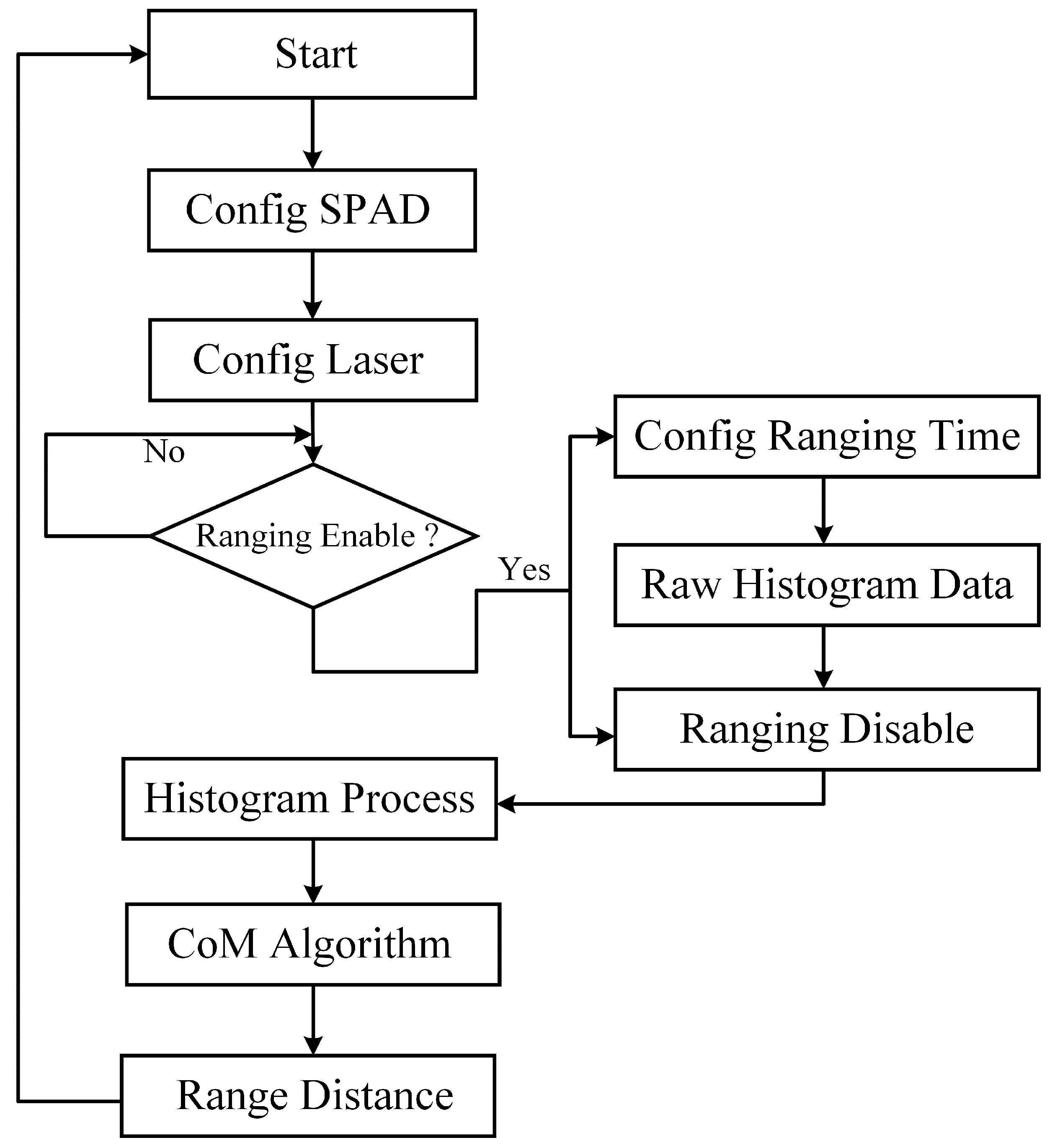
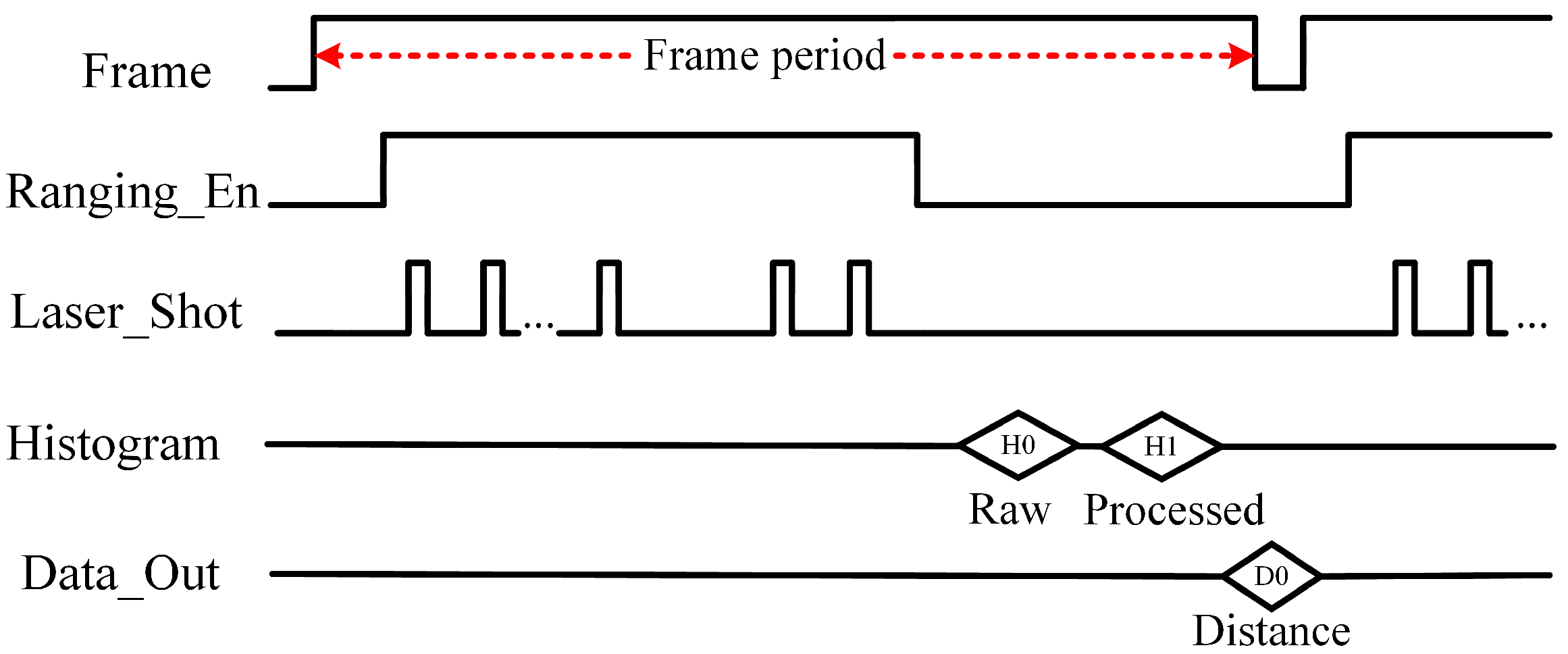
2. Ranging Sensor Chip Implementation
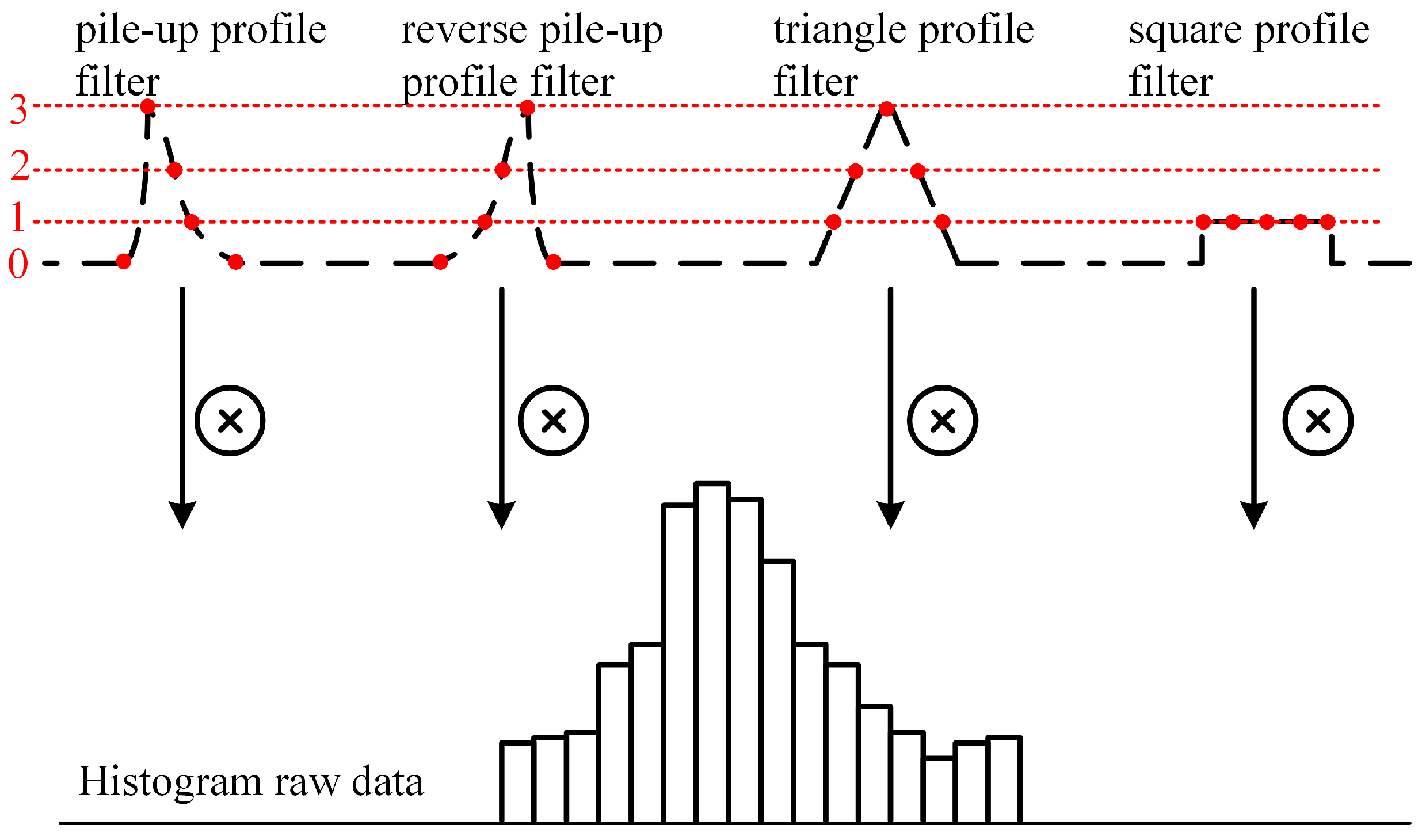
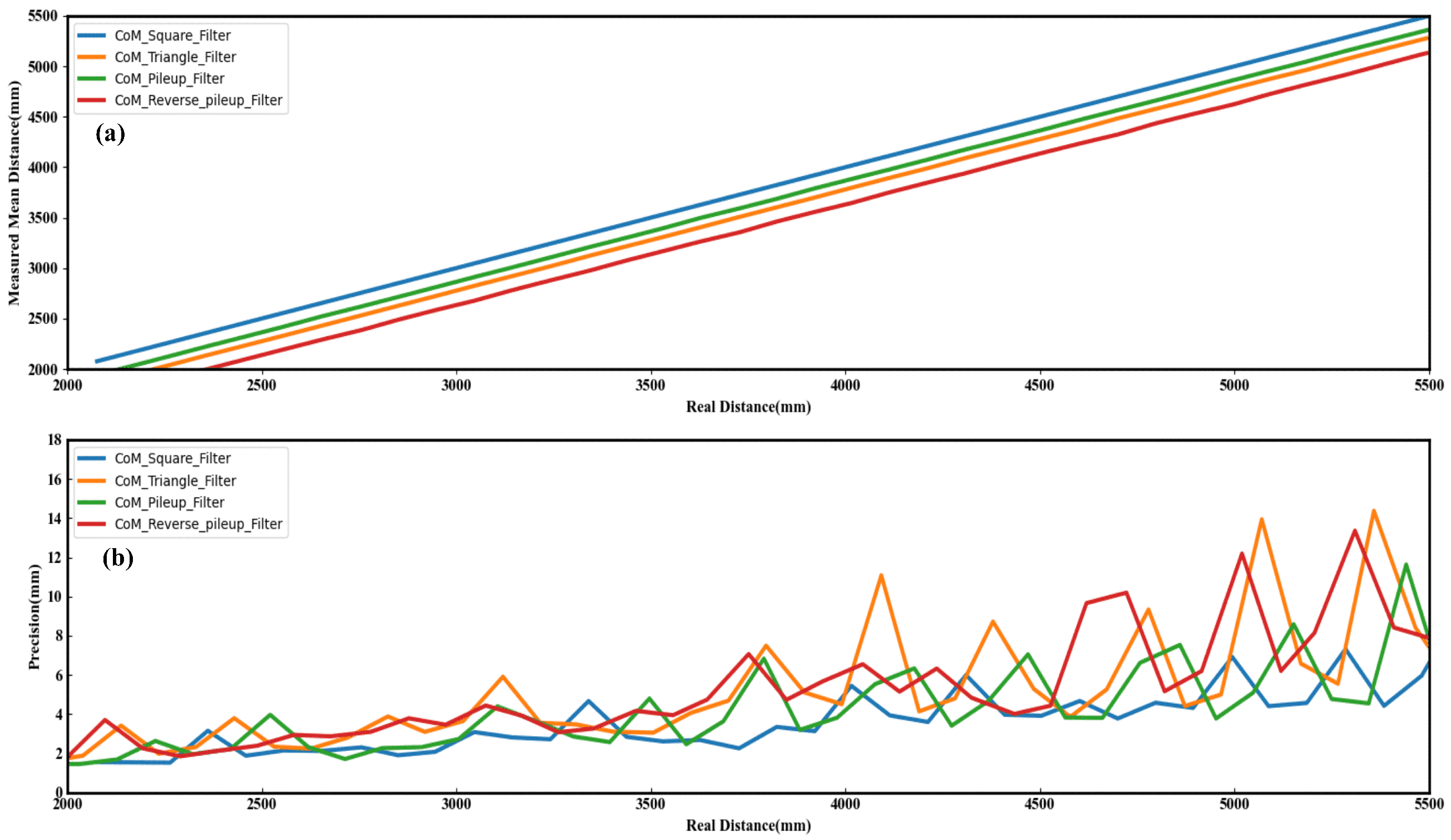
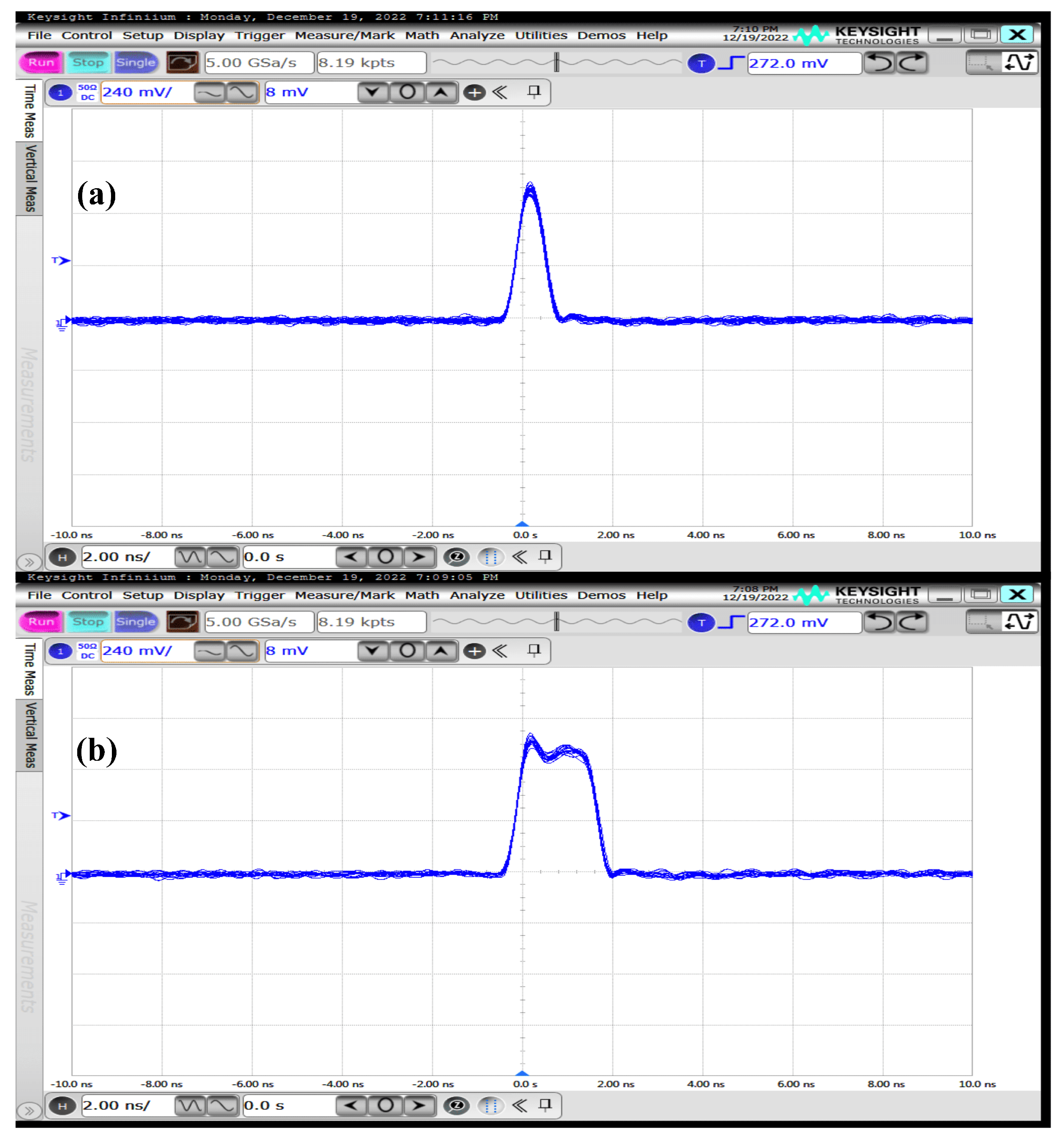
3. Defining the Best Profile Matched Filter
4. The Best Matched Filter and Ranging Results Implemented in the MCU Core
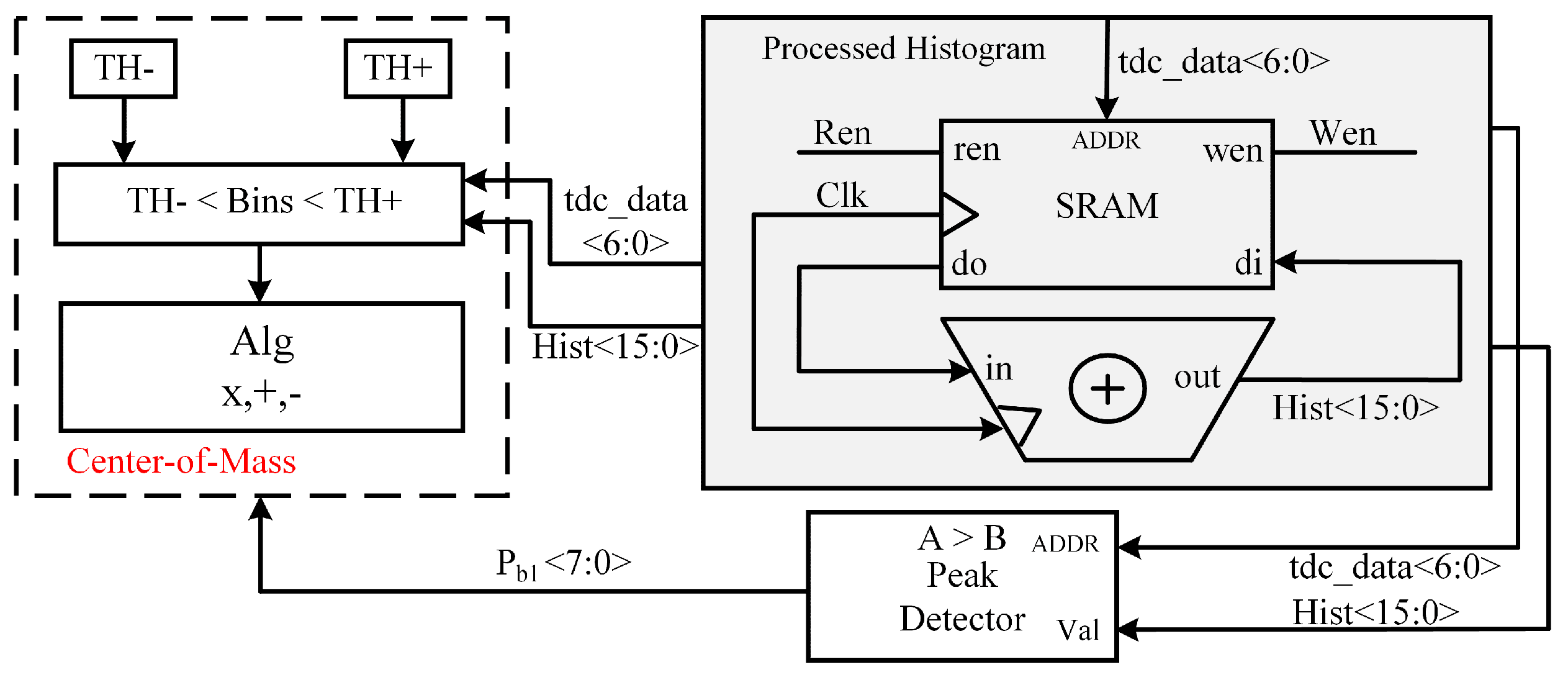
4.1. The Best Matched Filter Implemented in the MCU Core
4.2. The Ranging Results Measurement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Warren, M.E. Automotive LIDAR technology. In Proceedings of the 2019 Symposium on VLSI Circuits, Kyoto, Japan, 9–14 June 2019; pp. C254–C255. [Google Scholar]
- Anthony, W.Y.; Troupaki, E.; Li, S.X.; Coyle, D.B.; Stysley, P.; Numata, K.; Fahey, M.E.; Stephen, M.A.; Chen, J.R.; Yang, G.; et al. Orbiting and in situ Lidars for earth and planetary applications. In Proceedings of the IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 3479–3482. [Google Scholar]
- Palubiak, D.P.; Deen, M.J. CMOS SPADs: Design issues and research challenges for detectors, circuits, and arrays. IEEE J. Sel. Top. Quantum Electron. 2014, 20, 409–426. [Google Scholar] [CrossRef]
- Villa, F.; Severini, F.; Madonini, F.; Zappa, F. SPADs and SiPMs arrays for long-range high-speed light detection and ranging (LiDAR). Sensors 2021, 21, 3839. [Google Scholar] [CrossRef] [PubMed]
- Tontini, A.; Gasparini, L.; Perenzoni, M. Numerical model of SPAD-based direct time-of-flight flash lidar CMOS image sensors. Sensors 2020, 20, 5203. [Google Scholar] [CrossRef] [PubMed]
- Perenzoni, M.; Massari, N.; Gasparini, L.; Garcia, M.M.; Perenzoni, D.; Stoppa, D. A fast 50 × 40-pixels single-point DTOF SPAD sensor with photon counting and programmable ROI TDCs, with σ< 4 mm at 3 m up to 18 klux of background light. IEEE-Solid-State Circuits Lett. 2020, 3, 86–89. [Google Scholar]
- Huikari, J.; Jahromi, S.; Jansson, J.P.; Kostamovaara, J. Compact laser radar based on a subnanosecond laser diode transmitter and a two-dimensional CMOS single-photon receiver. Opt. Eng. 2018, 57, 024104. [Google Scholar] [CrossRef] [Green Version]
- Süss, A.; Rochus, V.; Rosmeulen, M.; Rottenberg, X. Benchmarking time-of-flight based depth measurement techniques. Smart Photonic Optoelectron. Integr. Circuits XVIII 2016, 9751, 199–217. [Google Scholar]
- Rodriguez, J.; Smith, B.; Hellman, B.; Gin, A.; Espinoza, A.; Takashima, Y. Multi-beam and single-chip LIDAR with discrete beam steering by digital micromirror device. Phys. Simul. Optoelectron. Devices XXVI 2018, 10526, 89–94. [Google Scholar]
- Hutchings, S.W.; Johnston, N.; Gyongy, I.; Al Abbas, T.; Dutton, N.A.; Tyler, M.; Chan, S.; Leach, J.; Henderson, R.K. A reconfigurable 3-D-stacked SPAD imager with in-pixel histogramming for flash LIDAR or high-speed time-of-flight imaging. IEEE J.-Solid-State Circuits 2019, 54, 2947–2956. [Google Scholar] [CrossRef] [Green Version]
- Niclass, C.; Soga, M.; Matsubara, H.; Ogawa, M.; Kagami, M. A 0.18-μm CMOS SoC for a 100-m-Range 10-Frame/s 200 × 96-Pixel Time-of-Flight Depth Sensor. IEEE J.-Solid-State Circuits 2013, 49, 315–330. [Google Scholar] [CrossRef]
- Jahromi, S.; Jansson, J.P.; Keränen, P.; Kostamovaara, J. A 32 × 128 SPAD-257 TDC receiver IC for pulsed TOF solid-state 3-D imaging. IEEE J.-Solid-State Circuits 2020, 55, 1960–1970. [Google Scholar] [CrossRef]
- Kumagai, O.; Ohmachi, J.; Matsumura, M.; Yagi, S.; Tayu, K.; Amagawa, K.; Matsukawa, T.; Ozawa, O.; Hirono, D.; Shinozuka, Y.; et al. 7.3 A 189 × 600 back-illuminated stacked SPAD direct time-of-flight depth sensor for automotive LiDAR systems. In Proceedings of the 2021 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 13–22 February 2021; Volume 64, pp. 110–112. [Google Scholar]
- Arlt, J.; Tyndall, D.; Rae, B.R.; Li, D.D.U.; Richardson, J.A.; Henderson, R.K. A study of pile-up in integrated time-correlated single photon counting systems. Rev. Sci. Instrum. 2013, 84, 103105. [Google Scholar] [CrossRef] [PubMed]
- Xia, T.; Chen, X.; Wu, Y.; Wang, Y.; Li, Y.; Wang, L.; Song, L.; Yu, H.; Xu, J.; Sun, M.; et al. An 8-A Sub-1 ns Pulsed VCSEL Driver IC with Built-in Pulse Monitor and Automatic Peak Current Control for Direct Time-of-Flight Applications. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 4193–4197. [Google Scholar] [CrossRef]
- Martin, F.; Mellot, P.; Caley, A.; Rae, B.; Campbell, C.; Hall, D.; Pellegrini, S. An all-in-one 64-zone SPAD-based direct-time-of-flight ranging sensor with embedded illumination. In Proceedings of the 2021 IEEE Sensors, Sydney, Australia, 31 October–3 November 2021; pp. 1–4. [Google Scholar]
- Gyongy, I.; Hutchings, S.W.; Halimi, A.; Tyler, M.; Chan, S.; Zhu, F.; McLaughlin, S.; Henderson, R.K.; Leach, J. High-speed 3D sensing via hybrid-mode imaging and guided upsampling. Optica 2020, 7, 1253–1260. [Google Scholar] [CrossRef]
- Taneski, F.; Al Abbas, T.; Henderson, R.K. Laser Power Efficiency of Partial Histogram Direct Time-of-Flight LiDAR Sensors. J. Light. Technol. 2022, 40, 5884–5893. [Google Scholar] [CrossRef]
- Rae, B.; Mellot, P. A SPAD-Based, Direct Time of Flight, 64 Zone, 15 fps, Parallel Ranging Device Based on 40 nm CMOS SPAD Technology. International SPAD Sensor Workshop. 2018. Available online: https://imagesensors.org/wp-content/uploads/2019/05/Bruce_Rae.pdf (accessed on 30 January 2023).
- Sesta, V.; Pasquinelli, K.; Federico, R.; Zappa, F.; Villa, F. Range-finding SPAD array with smart laser-spot tracking and TDC sharing for background suppression. IEEE Open J.-Solid-State Circuits Soc. 2021, 2, 26–37. [Google Scholar] [CrossRef]
- Silver, M.; Lee, S.T.; Borthwick, A.; Morton, G.; McNeill, C.; McSporran, D.; McRae, I.; McKinlay, G.; Jackson, D.; Alexander, W. Novel, ultra-compact, high-performance, eye-safe laser rangefinder for demanding applications. Laser Radar Technol. Appl. XXI 2016, 9832, 228–233. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performances | This Work | [6] | [20] |
|---|---|---|---|
| Technology | 0.13 µm | 0.15 µm | 0.16 µm |
| No. of pixels | 16 × 16 | 50 × 40 | 40 × 10 |
| Laser wavelength | 940 nm | 650 nm | 670 nm |
| Target reflectivity | 80%, 18% | 90% | 80% |
| Max range | 6 m@80%, 4 m@18% | 3 m | 2 m |
| Max dis. precision | 5 mm@80%, 8 mm@18% | 1.6 mm | 2.3 mm |
| Standard deviation | 2.2 mm@80%@3 m | 1.6 mm@3 m | 2.3 mm@2 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Wang, L.; Xu, J.; Chiang, P.Y. A dToF Ranging Sensor with Accurate Photon Detector Measurements for LiDAR Applications. Sensors 2023, 23, 3011. https://doi.org/10.3390/s23063011
Yu H, Wang L, Xu J, Chiang PY. A dToF Ranging Sensor with Accurate Photon Detector Measurements for LiDAR Applications. Sensors. 2023; 23(6):3011. https://doi.org/10.3390/s23063011
Chicago/Turabian StyleYu, Hengwei, Long Wang, Jiqing Xu, and Patrick Yin Chiang. 2023. "A dToF Ranging Sensor with Accurate Photon Detector Measurements for LiDAR Applications" Sensors 23, no. 6: 3011. https://doi.org/10.3390/s23063011
APA StyleYu, H., Wang, L., Xu, J., & Chiang, P. Y. (2023). A dToF Ranging Sensor with Accurate Photon Detector Measurements for LiDAR Applications. Sensors, 23(6), 3011. https://doi.org/10.3390/s23063011