
A New Generation of OPM for High Dynamic and Large Bandwidth MEG: The 4He OPMs—First Applications in Healthy Volunteers

 , , ,
, , ,  ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
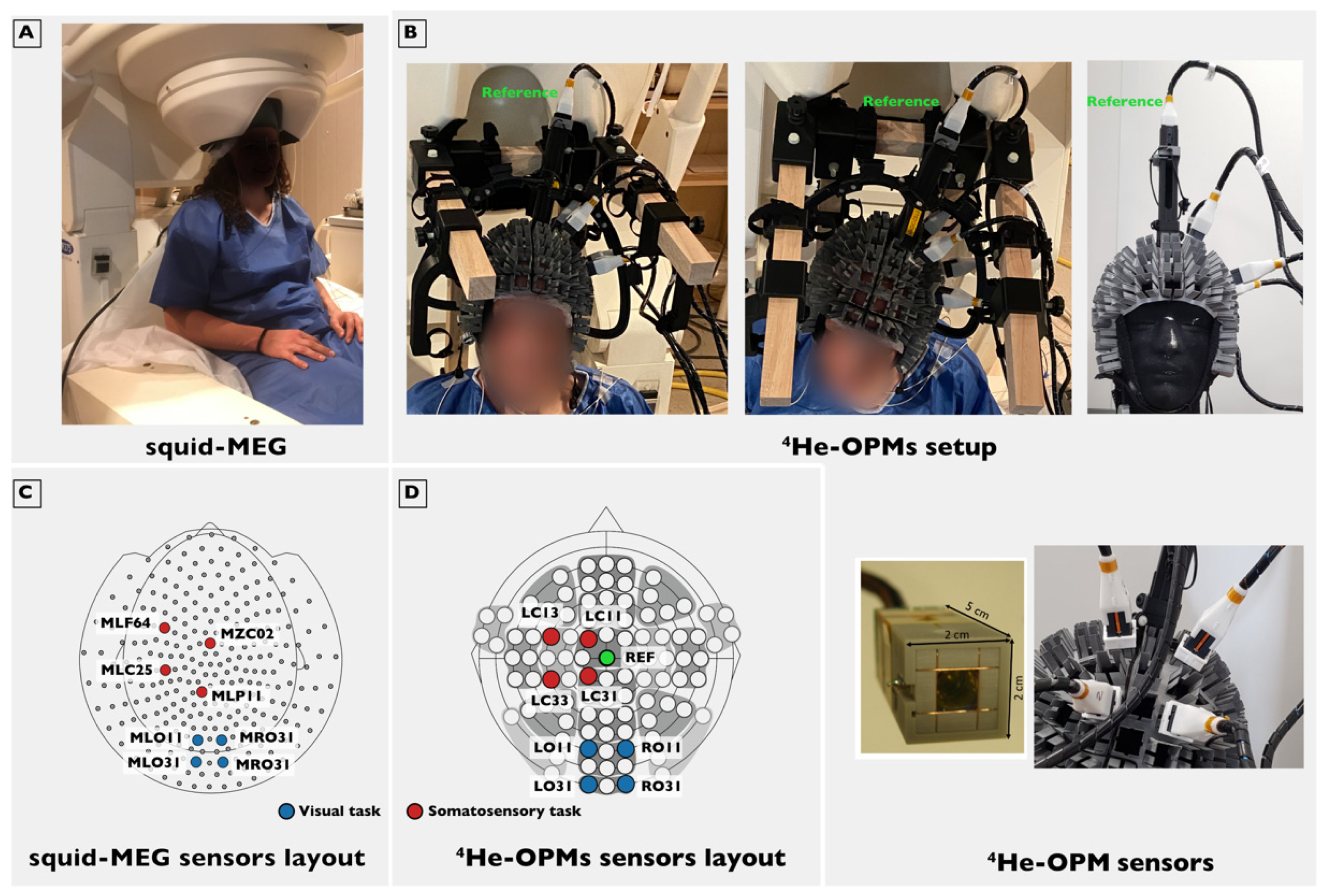
2.1. Data Acquisition
2.2. Classical SQUID-MEG
2.3. 4He-OPMs
2.4. Participants and Experimental Design
2.5. Data Analysis
3. Results
3.1. Empty Room Results
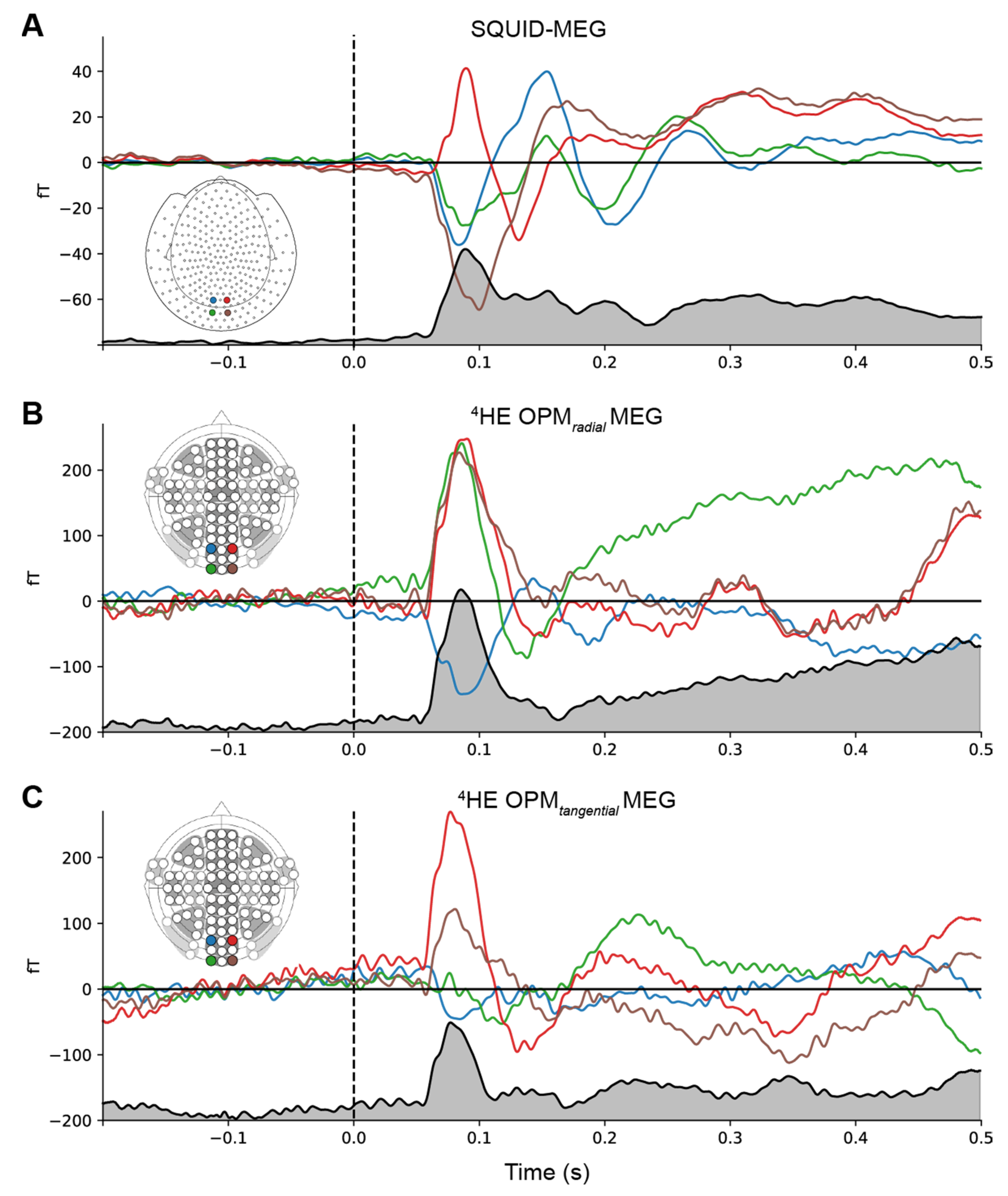
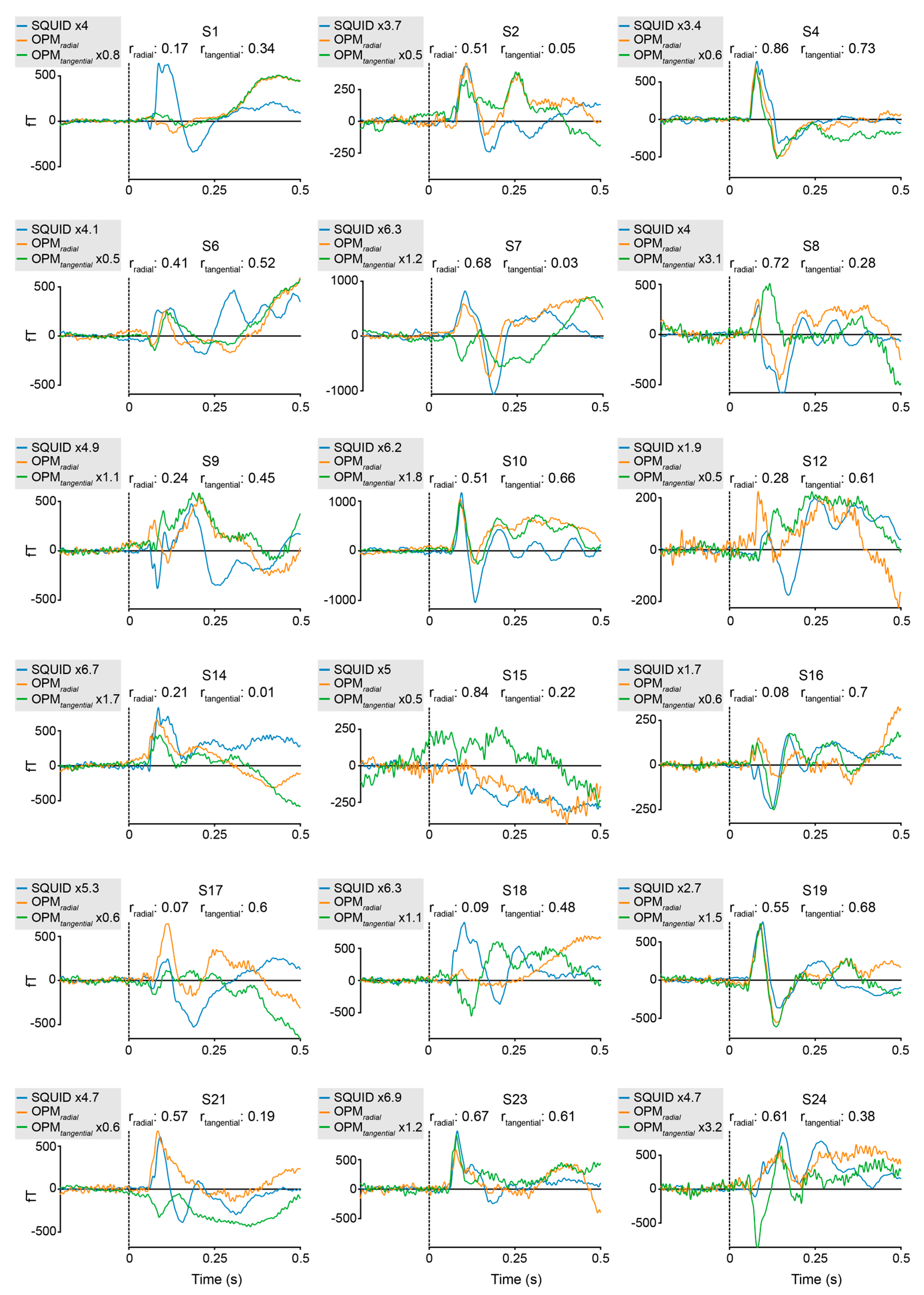
3.2. Somatosensory Stimulation
3.3. Visual Stimulation Experiment
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A


Appendix B
References
- Baillet, S. Magnetoencephalography for Brain Electrophysiology and Imaging. Nat. Neurosci. 2017, 20, 327–339. [Google Scholar] [CrossRef] [PubMed]
- Cohen, D. Magnetoencephalography: Detection of the Brain’s Electrical Activity with a Superconducting Magnetometer. Science 1972, 175, 664–666. [Google Scholar] [CrossRef] [PubMed]
- Budker, D.; Romalis, M.V. Optical Magnetometry. Nat. Phys. 2006, 3, 277. [Google Scholar] [CrossRef]
- Iivanainen, J.; Stenroos, M.; Parkkonen, L. Measuring MEG Closer to the Brain: Performance of on-Scalp Sensor Arrays. Neuroimage 2017, 147, 542–553. [Google Scholar] [CrossRef]
- Boto, E.; Meyer, S.S.; Shah, V.; Alem, O.; Knappe, S.; Kruger, P.; Fromhold, T.M.; Lim, M.; Glover, P.M.; Morris, P.G.; et al. A New Generation of Magnetoencephalography: Room Temperature Measurements Using Optically-Pumped Magnetometers. Neuroimage 2017, 149, 404–414. [Google Scholar] [CrossRef]
- Boto, E.; Holmes, N.; Leggett, J.; Roberts, G.; Shah, V.; Meyer, S.S.; Duque-Munoz, L.; Mullinger, K.J.; Tierney, T.M.; Bestmann, S.; et al. Moving Brain Imaging towards Real-World Applications Using a Wearable MEG System. Nature 2018, 555, 17–19. [Google Scholar] [CrossRef]
- Borna, A.; Carter, T.R.; Colombo, A.P.; Jau, Y.Y.; McKay, J.; Weisend, M.; Taulu, S.; Stephen, J.M.; Schwindt, P.D.D. Non-Invasive Functional-Brain-Imaging with an OPM-Based Magnetoencephalography System. PLoS ONE 2020, 15, e0227684. [Google Scholar] [CrossRef]
- Boto, E.; Shah, V.; Hill, R.M.; Rhodes, N.; Osborne, J.; Doyle, C.; Holmes, N.; Rea, M.; Leggett, J.; Bowtell, R.; et al. Triaxial Detection of the Neuromagnetic Field Using Optically-Pumped Magnetometry: Feasibility and Application in Children. Neuroimage 2022, 252, 119027. [Google Scholar] [CrossRef]
- Hill, R.M.; Boto, E.; Holmes, N.; Hartley, C.; Seedat, Z.A.; Leggett, J.; Roberts, G.; Shah, V.; Tierney, T.M.; Woolrich, M.W.; et al. A Tool for Functional Brain Imaging with Lifespan Compliance. Nat. Commun. 2019, 10, 4785. [Google Scholar] [CrossRef]
- Iivanainen, J.; Zetter, R.; Parkkonen, L. Potential of On-scalp MEG: Robust Detection of Human Visual Gamma-band Responses. Hum. Brain Mapp. 2019, 150–161. [Google Scholar] [CrossRef]
- Seymour, R.A.; Alexander, N.; Mellor, S.; O’Neill, G.C.; Tierney, T.M.; Barnes, G.R.; Maguire, E.A. Using OPMs to Measure Neural Activity in Standing, Mobile Participants. Neuroimage 2021, 244, 118604. [Google Scholar] [CrossRef]
- Vivekananda, U.; Mellor, S.; Tierney, T.M.; Holmes, N.; Boto, E.; Leggett, J.; Roberts, G.; Hill, R.M.; Litvak, V.; Brookes, M.J.; et al. Optically Pumped Magnetoencephalography in Epilepsy. Ann. Clin. Transl. Neurol. 2020, 7, 397–401. [Google Scholar] [CrossRef] [PubMed]
- Feys, O.; Corvilain, P.; Aeby, A.; Sculier, C.; Holmes, N.; Brookes, M.; Goldman, S.; Wens, V.; De Tiège, X. On-Scalp Optically Pumped Magnetometers versus Cryogenic Magnetoencephalography for Diagnostic Evaluation of Epilepsy in School-Aged Children. Radiology 2022, 304, 429–434. [Google Scholar] [CrossRef]
- Brookes, M.J.; Leggett, J.; Rea, M.; Hill, R.M.; Holmes, N.; Boto, E.; Bowtell, R. Magnetoencephalography with Optically Pumped Magnetometers (OPM-MEG): The next Generation of Functional Neuroimaging. Trends Neurosci. 2022, 45, 621–634. [Google Scholar] [CrossRef] [PubMed]
- Labyt, E.; Tilmann, S.; Wakai, R. Flexible High Performance Magnetic Field Sensors; Labyt, E., Sander, T., Wakai, R., Eds.; Springer International Publishing: Cham, Switzerland, 2022; ISBN 9783031053627. [Google Scholar] [CrossRef]
- Westner, B.U.; Lubell, J.I.; Jensen, M.; Hokland, S.; Dalal, S.S. Contactless Measurements of Retinal Activity Using Optically Pumped Magnetometers. Neuroimage 2021, 243, 118528. [Google Scholar] [CrossRef] [PubMed]
- Bu, Y.; Prince, J.; Mojtahed, H.; Kimball, D.; Shah, V.; Coleman, T.; Sarkar, M.; Rao, R.; Huang, M.; Schwindt, P.; et al. Peripheral Nerve Magnetoneurography with Optically Pumped Magnetometers. Front. Physiol. 2022, 13, 8376. [Google Scholar] [CrossRef]
- Rea, M.; Boto, E.; Holmes, N.; Hill, R.; Osborne, J.; Rhodes, N.; Leggett, J.; Rier, L.; Bowtell, R.; Shah, V.; et al. A 90-Channel Triaxial Magnetoencephalography System Using Optically Pumped Magnetometers. Ann. N. Y. Acad. Sci. 2022, 1517, 107–124. [Google Scholar] [CrossRef] [PubMed]
- Hill, R.M.; Boto, E.; Rea, M.; Holmes, N.; Leggett, J.; Coles, L.A.; Papastavrou, M.; Everton, S.; Hunt, B.; Sims, D.; et al. Multi-Channel Whole-Head OPM-MEG: Helmet Design and a Comparison with a Conventional System. bioRxiv 2020, 219, 116995. [Google Scholar] [CrossRef] [PubMed]
- Seymour, R.A.; Alexander, N.; Mellor, S.; O’Neill, G.C.; Tierney, T.M.; Barnes, G.R.; Maguire, E.A. Interference Suppression Techniques for OPM-Based MEG: Opportunities and Challenges. Neuroimage 2022, 247, 118834. [Google Scholar] [CrossRef] [PubMed]
- Borna, A.; Iivanainen, J.; Carter, T.R.; McKay, J.; Taulu, S.; Stephen, J.; Schwindt, P.D.D. Cross-Axis Projection Error in Optically Pumped Magnetometers and Its Implication for Magnetoencephalography Systems. Neuroimage 2022, 247, 118818. [Google Scholar] [CrossRef]
- Rea, M.; Holmes, N.; Hill, R.M.; Boto, E.; Leggett, J.; Edwards, L.J.; Woolger, D.; Dawson, E.; Shah, V.; Osborne, J.; et al. Precision Magnetic Field Modelling and Control for Wearable Magnetoencephalography. Neuroimage 2021, 241, 118401. [Google Scholar] [CrossRef] [PubMed]
- Holmes, N.; Rea, M.; Chalmers, J.; Leggett, J.; Edwards, L.J.; Nell, P.; Pink, S.; Patel, P.; Wood, J.; Murby, N.; et al. A Lightweight Magnetically Shielded Room with Active Shielding. Sci. Rep. 2022, 12, 13561. [Google Scholar] [CrossRef] [PubMed]
- Beato, F.; Belorizky, E.; Labyt, E.; Le Prado, M.; Palacios-Laloy, A. Theory of a He 4 Parametric-Resonance Magnetometer Based on Atomic Alignment. Phys. Rev. A 2018, 98, 053431. [Google Scholar] [CrossRef]
- Labyt, E.; Corsi, M.; Fourcault, W.; Laloy, A.P.; Lenouvel, F.; Cauffet, G.; Le Prado, M.; Berger, F.; Morales, S. Magnetoencephalography with Optically Pumped He Magnetometers at Ambient Temperature. IEEE Trans. Med. Imaging 2018, 6, 90–98. [Google Scholar] [CrossRef]
- Fourcault, W.; Romain, R.; Le Gal, G.; Bertrand, F.; Josselin, V.; Le Prado, M.; Labyt, E.; Palacios-Laloy, A. Helium-4 Magnetometers for Room-Temperature Biomedical Imaging: Toward Collective Operation and Photon-Noise Limited Sensitivity. Opt. Express 2021, 29, 14467–14475. [Google Scholar] [CrossRef]
- Leger, J.M. Magnétométrie à Pompage Optique: Conception, Réalisation et Évaluation Des Performances d’un Magnétomètre Scalaire Utilisant l’hélium 4 Pompé Par Un Laser LNA; Université Joseph Fourier: Grenoble, France, 1990. [Google Scholar]
- Prado, M. Le Conception, Réalisation et Application d’un Magnétomètre Atomique Vectoriel; Université de Franche-Comté: Besancon, France, 2014. [Google Scholar]
- Dupont-Roc, J. Étude Théorique de Diverses Résonances Observables En Champ Nul Sur Des Atomes « habillés » Par Des Photons de Radiofréquence. J. Phys. Fr. 1971, 32, 135–144. [Google Scholar] [CrossRef]
- Curio, G.; Mackert, B.M.; Burghoff, M.; Neumann, J.; Nolte, G.; Scherg, M.; Marx, P. Somatotopic Source Arrangement of 600 Hz Oscillatory Magnetic Fields at the Human Primary Somatosensory Hand Cortex. Neurosci. Lett. 1997, 234, 131–134. [Google Scholar] [CrossRef]
- Gramfort, A.; Luessi, M.; Larson, E.; Engemann, D.A.; Strohmeier, D.; Brodbeck, C.; Goj, R.; Jas, M.; Brooks, T.; Parkkonen, L.; et al. MEG and EEG Data Analysis with MNE-Python. Front. Neurosci. 2013, 7, 267. [Google Scholar] [CrossRef]
- Vrba, J.; Robinson, S.E. Signal Processing in Magnetoencephalography. Methods 2001, 25, 249–271. [Google Scholar] [CrossRef]
- Jas, M.; Engemann, D.A.; Bekhti, Y.; Raimondo, F.; Gramfort, A. Autoreject: Automated Artifact Rejection for MEG and EEG Data. Neuroimage 2017, 159, 417–429. [Google Scholar] [CrossRef]
- Heinrichs-Graham, E.; Wiesman, A.I.; Embury, C.M.; Schantell, M.; Joe, T.R.; Eastman, J.A.; Wilson, T.W. Differential Impact of Movement on the Alpha and Gamma Dynamics Serving Visual Processing. J. Neurophysiol. 2022, 127, 928–937. [Google Scholar] [CrossRef] [PubMed]
- Maris, E.; Oostenveld, R. Nonparametric Statistical Testing of EEG- and MEG-Data. J. Neurosci. Methods 2007, 164, 177–190. [Google Scholar] [CrossRef] [PubMed]
- Josiassen, R.C.; Shagass, C.; Roemer, R.A.; Slepner, S.; Czartorysky, B. Early Cognitive Components of Somatosensory Event-Related Potentials. Int. J. Psychophysiol. 1990, 9, 139–149. [Google Scholar] [CrossRef]
- Lim, M.; Kim, J.S.; Chung, C.K. Modulation of Somatosensory Evoked Magnetic Fields by Intensity of Interfering Stimuli in Human Somatosensory Cortex: An MEG Study. Neuroimage 2012, 61, 660–669. [Google Scholar] [CrossRef]
- Walsh, P.; Kane, N.; Butler, S. The Clinical Role of Evoked Potentials. J. Neurol. Neurosurg. Psychiatry 2005, 76, ii16–ii22. [Google Scholar] [CrossRef]
- Zahran, S.; Mahmoudzadeh, M.; Wallois, F.; Betrouni, N.; Derambure, P.; Le Prado, M.; Palacios-Laloy, A.; Labyt, E. Performance Analysis of Optically Pumped (4)He Magnetometers vs. Conventional SQUIDs: From Adult to Infant Head Models. Sensors 2022, 22, 93. [Google Scholar] [CrossRef]
- Iivanainen, J.; Mäkinen, A.J.; Zetter, R.; Stenroos, M.; Ilmoniemi, R.J.; Parkkonen, L. Spatial Sampling of MEG and EEG Based on Generalized Spatial-Frequency Analysis and Optimal Design. Neuroimage 2021, 245, 118747. [Google Scholar] [CrossRef]
- Brookes, M.J.; Boto, E.; Rea, M.; Shah, V.; Osborne, J.; Holmes, N.; Hill, R.M.; Leggett, J.; Rhodes, N.; Bowtell, R. Theoretical Advantages of a Triaxial Optically Pumped Magnetometer Magnetoencephalography System. Neuroimage 2021, 236, 118025. [Google Scholar] [CrossRef]
- Tierney, T.M.; Alexander, N.; Mellor, S.; Holmes, N.; Seymour, R.; O’Neill, G.C.; Maguire, E.A.; Barnes, G.R. Modelling Optically Pumped Magnetometer Interference in MEG as a Spatially Homogeneous Magnetic Field. Neuroimage 2021, 244, 118484. [Google Scholar] [CrossRef]
- Gross, J.; Kujala, J.; Hämäläinen, M.; Timmermann, L.; Schnitzler, A.; Salmelin, R. Dynamic Imaging of Coherent Sources: Studying Neural Interactions in the Human Brain. Proc. Natl. Acad. Sci. USA 2001, 98, 694–699. [Google Scholar] [CrossRef] [PubMed]
- Cohen-Tannoudji, C.; Dupont-Roc, J.; Haroche, S.; Laloë, F. Diverses Résonances de Croisement de Niveaux Sur Des Atomes Pompés Optiquement En Champ Nul. I. Théorie. Rev. Phys. Appl. 1970, 5, 95–101. [Google Scholar] [CrossRef]
- Dupont-Roc, J. Détermination Par Des Méthodes Optiques Des Trois Composantes d’un Champ Magnétique Très Faible. Rev. Phys. Appl. 1970, 5, 853–864. [Google Scholar] [CrossRef]
- Hill, R.M.; Devasagayam, J.; Holmes, N.; Boto, E.; Shah, V.; Osborne, J.; Safar, K.; Worcester, F.; Mariani, C.; Dawson, E.; et al. Using OPM-MEG in Contrasting Magnetic Environments. Neuroimage 2022, 253, 119084. [Google Scholar] [CrossRef] [PubMed]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gutteling, T.P.; Bonnefond, M.; Clausner, T.; Daligault, S.; Romain, R.; Mitryukovskiy, S.; Fourcault, W.; Josselin, V.; Le Prado, M.; Palacios-Laloy, A.; et al. A New Generation of OPM for High Dynamic and Large Bandwidth MEG: The 4He OPMs—First Applications in Healthy Volunteers. Sensors 2023, 23, 2801. https://doi.org/10.3390/s23052801
Gutteling TP, Bonnefond M, Clausner T, Daligault S, Romain R, Mitryukovskiy S, Fourcault W, Josselin V, Le Prado M, Palacios-Laloy A, et al. A New Generation of OPM for High Dynamic and Large Bandwidth MEG: The 4He OPMs—First Applications in Healthy Volunteers. Sensors. 2023; 23(5):2801. https://doi.org/10.3390/s23052801
Chicago/Turabian StyleGutteling, Tjerk P., Mathilde Bonnefond, Tommy Clausner, Sébastien Daligault, Rudy Romain, Sergey Mitryukovskiy, William Fourcault, Vincent Josselin, Matthieu Le Prado, Agustin Palacios-Laloy, and et al. 2023. "A New Generation of OPM for High Dynamic and Large Bandwidth MEG: The 4He OPMs—First Applications in Healthy Volunteers" Sensors 23, no. 5: 2801. https://doi.org/10.3390/s23052801
APA StyleGutteling, T. P., Bonnefond, M., Clausner, T., Daligault, S., Romain, R., Mitryukovskiy, S., Fourcault, W., Josselin, V., Le Prado, M., Palacios-Laloy, A., Labyt, E., Jung, J., & Schwartz, D. (2023). A New Generation of OPM for High Dynamic and Large Bandwidth MEG: The 4He OPMs—First Applications in Healthy Volunteers. Sensors, 23(5), 2801. https://doi.org/10.3390/s23052801