

Multispectral UAV Data and GPR Survey for Archeological Anomaly Detection Supporting 3D Reconstruction




Abstract
1. Introduction
- Validation of a protocol for the combined use of sensors in archeological surveys to support 3D reconstruction at the territorial scale. This protocol is formulated according to the logic that a lower intensity corresponds to a greater extent of investigation and vice versa [26,27]. This means that intensity is a combination of acquisition and processing time, implementation cost, lower impact on remains, and greater effectiveness of NDT compared to archeological excavation alone [28,29].
- Ground truthing for identified GPR anomalies using archeological excavations.
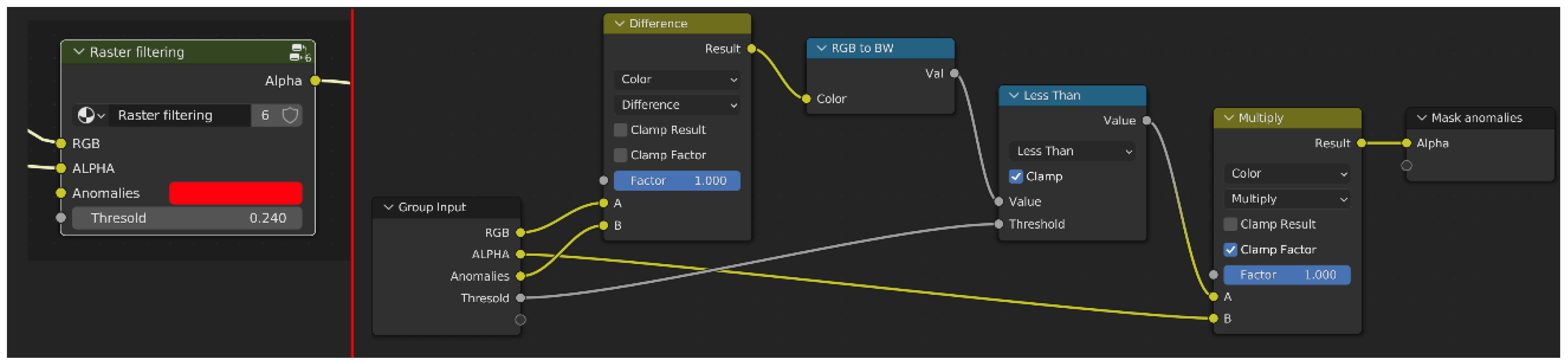
- Development of a workflow for managing GPR data (time slices) using Blender software (Blender: 3D Survey Collection, new version 1.6) by developing original tools for visually filtering and cleaning the data.
- Formalize geophysical EMW (with addition of extended matrix layer) to track process transparency, read and interpret anomalies, and create 3D reconstructions using GPR data.
2. Materials and Methods
- Selection of an archeological landscape suitable for testing the proposed methodology (Section 2.1);
- Multispectral photogrammetric survey (MPHG) (Section 2.2);
- Multispectral map processing and anomaly identification (Section 3.1);
- Photogrammetric RGB survey (PHG) for the selected area before in-depth analysis with GPR technique (Section 2.2);
- GPR acquisitions (Section 2.3), time-slices processing, and anomalies identification (Section 3.2);
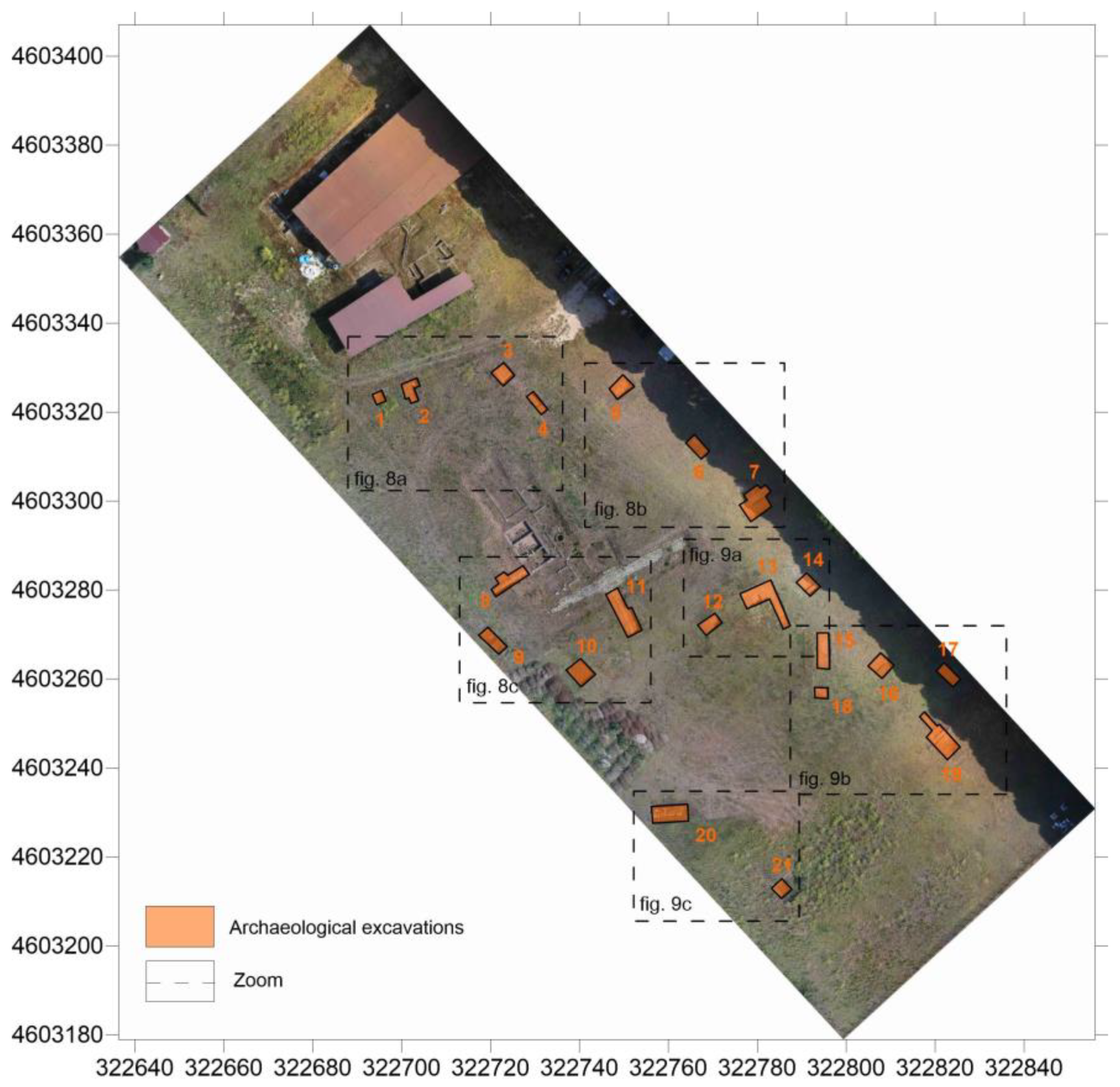
- Verification of ground truth in accordance with GPR anomalies through archeological excavations (Section 2.4);
- RGB photogrammetric survey (PHG) after excavations (Section 2.2);
- Management and visualization of DEM, orthophotos, and time slices in Blender (Section 3.3);
- Anomalies representation using 3D proxies and data interpolation (Section 3.3);
- Implementation of the extended matrix (EM) to support traceability of the information used in 3D modeling (Section 3.3).
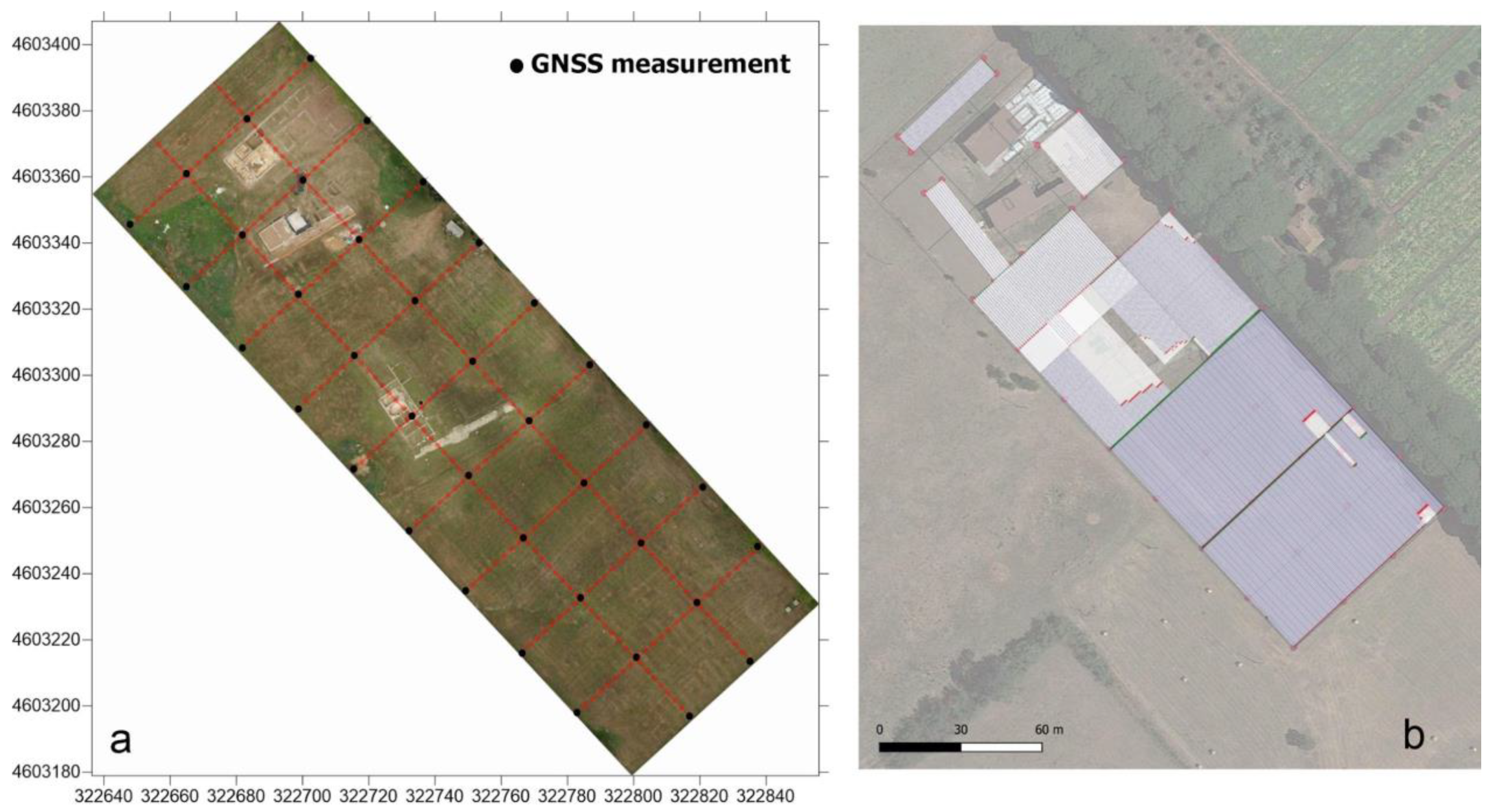
2.1. Case Study’s Definition and Relevance: Tres Tabernae
2.2. Photogrammetry in Archaeological Prospecting: Background and Methodological Overview
2.2.1. Multispectral Photogrammetry in Archaeology: Background and Methodological Overview
2.2.2. RGB Photogrammetry
2.3. GPR Survey
2.4. Validation through Archaeological Excavation
2.4.1. Extended Matrix: NDT Data Management and Visualization in Blender
- Data collection: collection of sources (geomatics, geophysics, archeology, history, etc.);
- Data management and analysis: design of proxy models for existing structures semantically enriched with stratigraphic information;
- Implementation and virtual reconstruction: design of proxy models for reconstructive hypotheses based on archeological evidence and sources. The proxy model is then linked to the EM and assigned different color codes representing different levels of confidence.
- Representation model: design of a textured and shaded reconstructive photorealistic mesh;
- Publication and dissemination: rendering of the mesh model according to the chosen esthetic style and publication context.
- Terrain and visible structures 3D model;
- Time slices;
- Multispectral maps;
- RGB orthophotos.
3. Results and Discussion
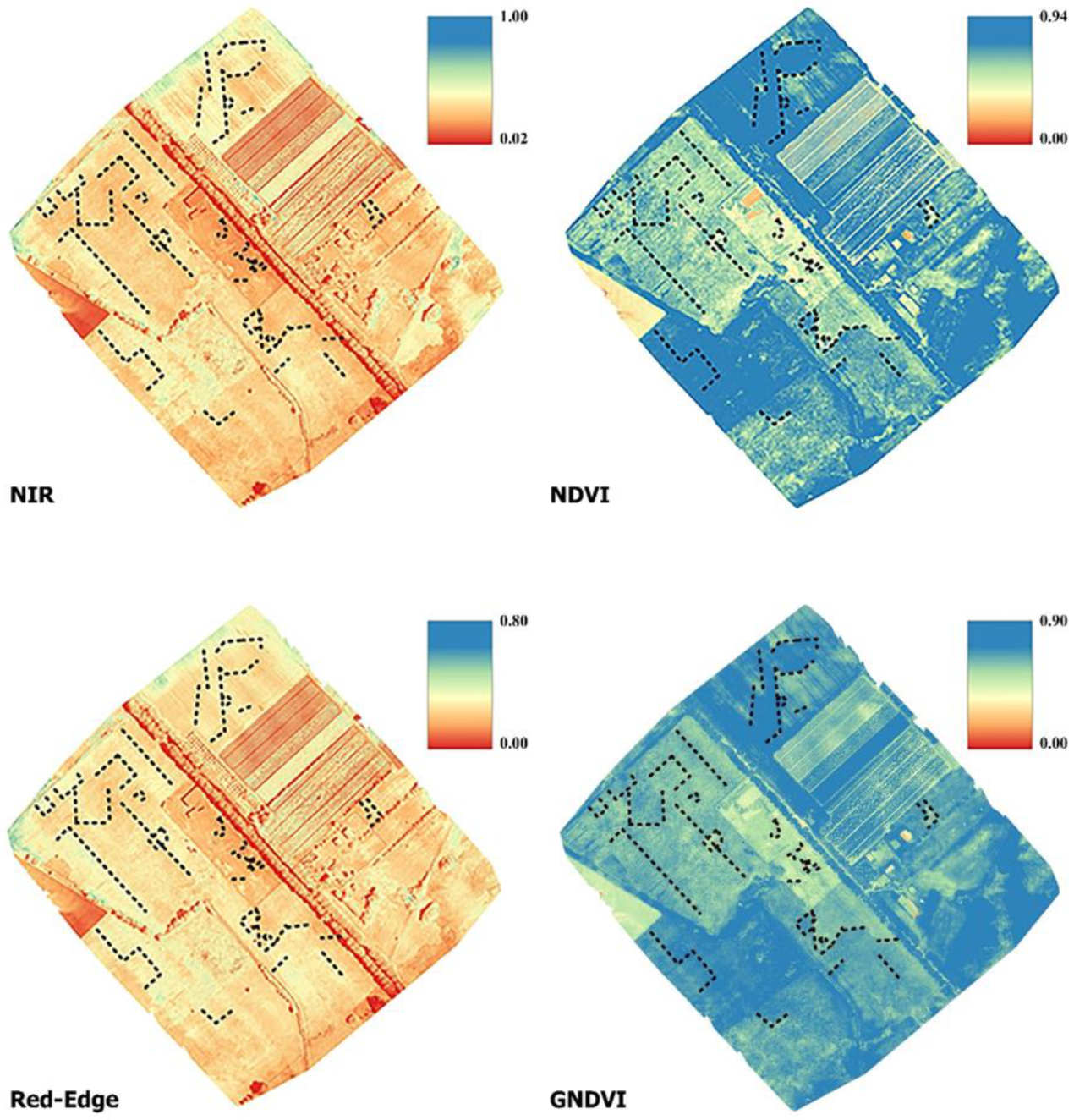
3.1. Multispectral Maps
- NIR: Near infrared is one of the most productive spectra for cropmark detection [65,66]. More specifically, green and healthy plants tend to show high values in the NIR band, while stressed vegetation is characterized by a low NIR value due to water or nutrient deficiency. This fact makes the NIR band ideal for identifying archeological cropmarks related to changes in the growth and/or color of vegetation compared to the surrounding environment. In the NIR band (700/750 nm to 1400 nm), the spectral characteristics of leaves are no longer determined by pigments. The very steep increase in energy reflectance between 700 nm and 750 nm is located exactly in the “red edge” zone, i.e., the most important feature in the reflectance spectrum of healthy vegetation. This transition zone with a very abrupt change in reflectance results from the fact that absorption by pigments is low and NIR reflectance increases, leading to one of the most extreme slopes in the reflectance spectra of natural materials. It should also be noted that the red-edge band is a sensitive spectral band that helps to improve the accuracy of plant classification and, thus, the identification of anomalies [67]. The following indices were calculated using the multispectral camera:
- NDVI: Normalized difference vegetation index is a measure of healthy green vegetation [46,68]. NDVI was calculated using the following equation from near-infrared (790 nm) and red (660 nm) reflectance measurements (with 40 nm full-width half-full-maximum bandwidth) of the spectrum and band values from −1.0 to 1.0.
- GNDVI: Green normalized difference vegetation index is similar to NDVI except that it measures the green spectrum from 540 to 570 nm instead of the red spectrum [30]. It is an index for photosynthetic activity. It is a chlorophyll index and is used at later stages of development because it saturates later than NDVI. It is one of the most commonly used vegetation indices for determining water and nitrogen uptake in the plant canopy.
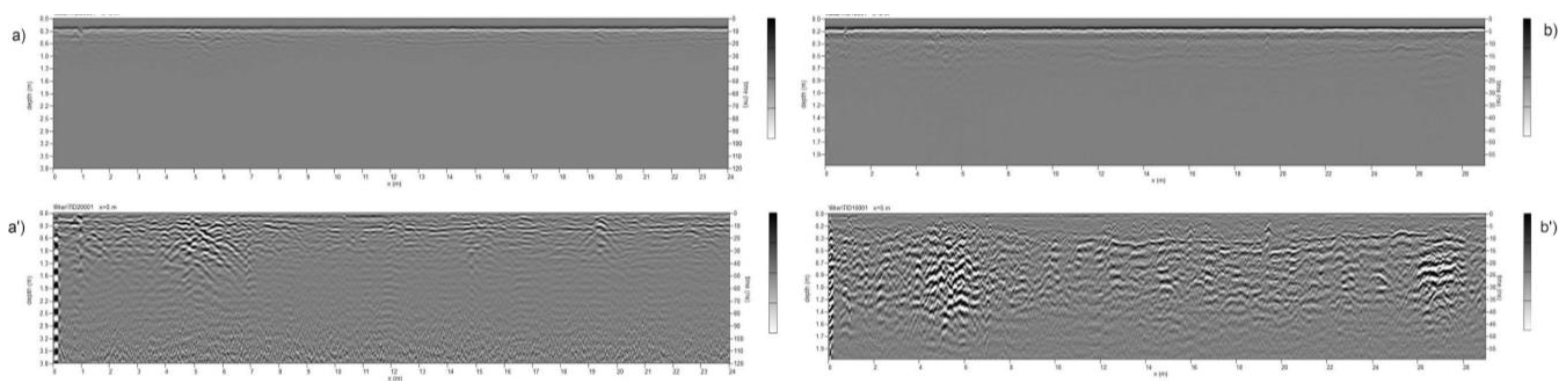
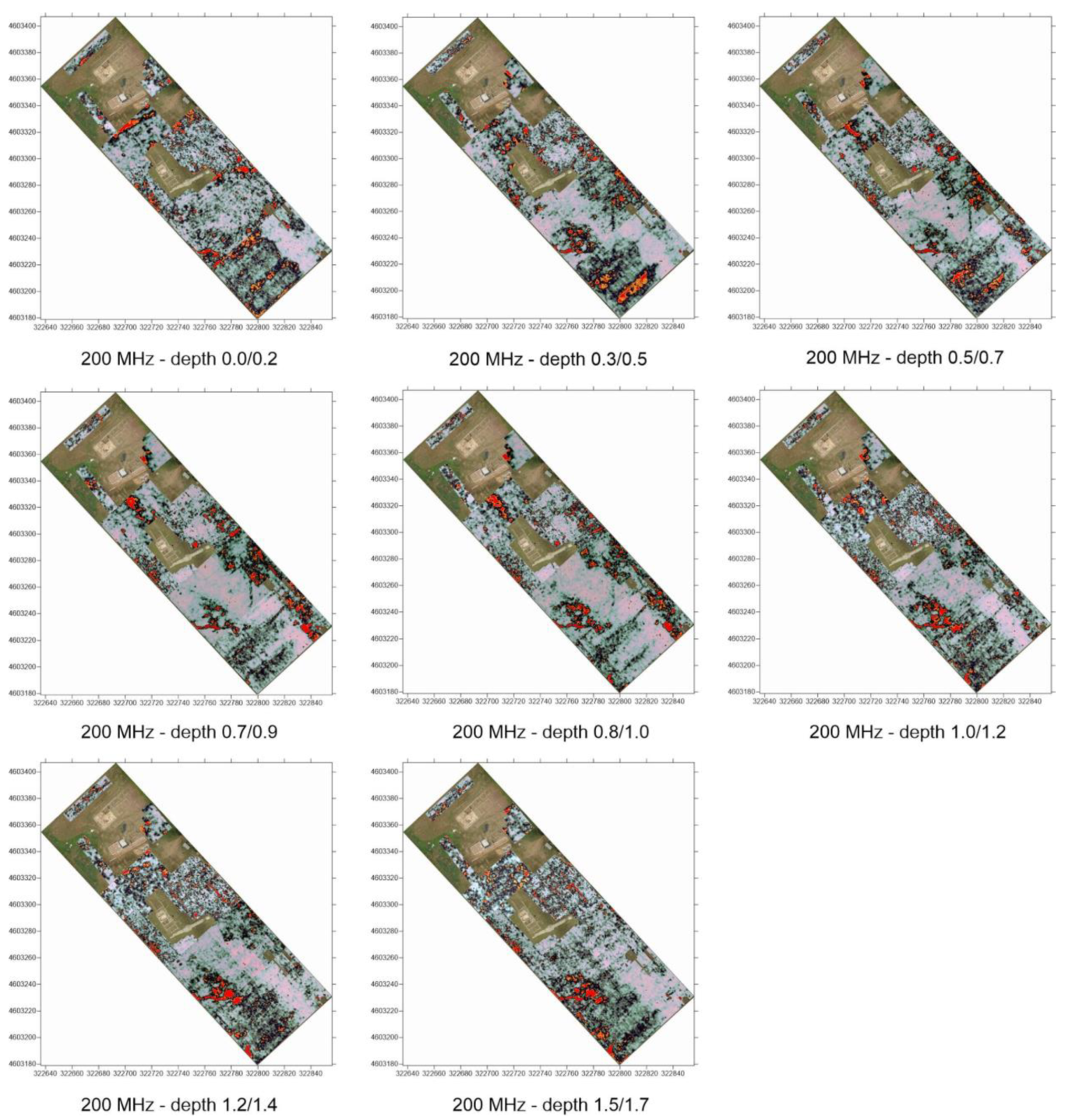
3.2. GPR Time Slices
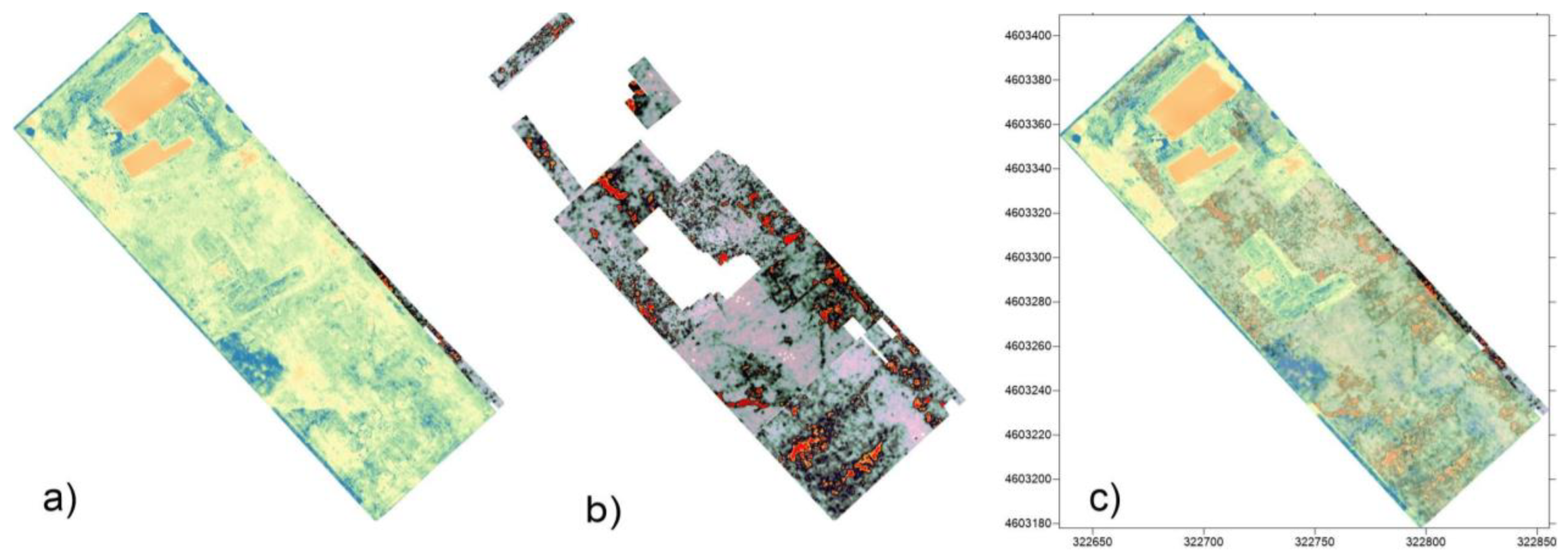
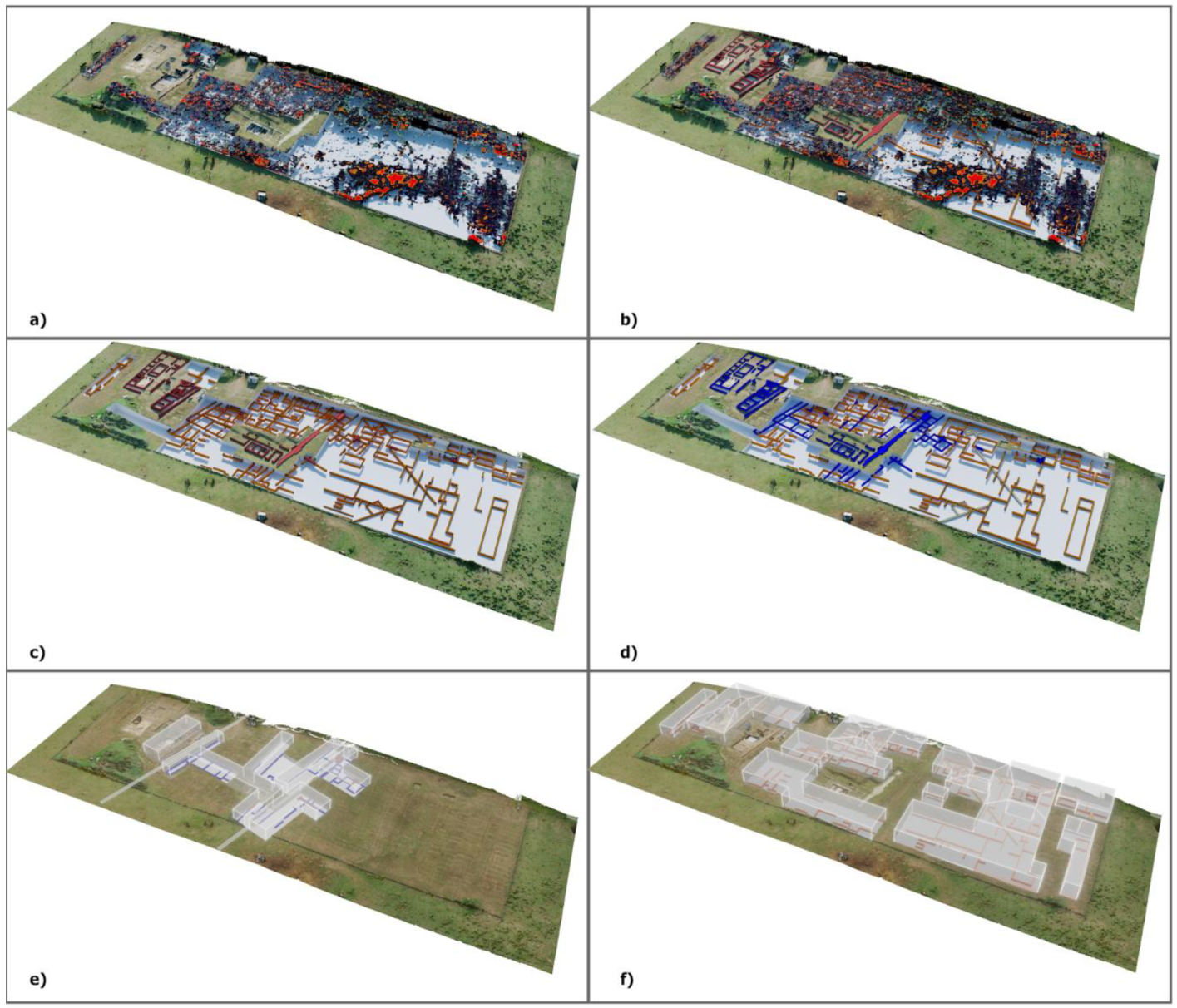
3.3. Transparent Integrated Dataset and Standardized Views of the Tres Tabenae Site
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Agapiou, A.; Lysandrou, V. Remote Sensing Archaeology: Tracking and Mapping Evolution in European Scientific Literature from 1999 to 2015. J. Archaeol. Sci. Rep. 2015, 4, 192–200. [Google Scholar] [CrossRef]
- Tapete, D. Remote Sensing and Geosciences for Archaeology. Geosciences 2018, 8, 41. [Google Scholar] [CrossRef]
- Maté-González, M.Á.; Sáez Blázquez, C.; Carrasco García, P.; Rodríguez-Hernández, J.; Fernández Hernández, J.; Vallés Iriso, J.; Torres, Y.; Troitiño Torralba, L.; Courtenay, L.A.; González-Aguilera, D.; et al. Towards a Combined Use of Geophysics and Remote Sensing Techniques for the Characterization of a Singular Building: “El Torreón” (the Tower) at Ulaca Oppidum (Solosancho, Ávila, Spain). Sensors 2021, 21, 2934. [Google Scholar] [CrossRef] [PubMed]
- Cuenca-García, C.; Risbøl, O.; Bates, C.R.; Stamnes, A.A.; Skoglund, F.; Ødegård, Ø.; Viberg, A.; Koivisto, S.; Fuglsang, M.; Gabler, M.; et al. Sensing Archaeology in the North: The Use of Non-Destructive Geophysical and Remote Sensing Methods in Archaeology in Scandinavian and North Atlantic Territories. Remote Sens. 2020, 12, 3102. [Google Scholar] [CrossRef]
- Opitz, R.; Herrmann, J. Recent Trends and Long-Standing Problems in Archaeological Remote Sensing. J. Comput. Appl. Archaeol. 2018, 1, 19–41. [Google Scholar] [CrossRef]
- Forte, E.; Mocnik, A.; Basso, P.; Casagrande, G.; Martinucci, D.; Pillon, S.; Possamai, M.; Zambrini, R. Optimised Extraction of Archaeological Features from Full 3-D GPR Data. Appl. Sci. 2021, 11, 8517. [Google Scholar] [CrossRef]
- Sarris, A.; Papadopoulos, N.; Agapiou, A.; Salvi, M.C.; Hadjimitsis, D.G.; Parkinson, W.A.; Yerkes, R.W.; Gyucha, A.; Duffy, P.R. Integration of Geophysical Surveys, Ground Hyperspectral Measurements, Aerial and Satellite Imagery for Archaeological Prospection of Prehistoric Sites: The Case Study of Vészto{doubleacute}-Mágor Tell, Hungary. J. Archaeol. Sci. 2013, 40, 1454–1470. [Google Scholar] [CrossRef]
- Monterroso-Checa, A.; Teixidó, T.; Gasparini, M.; Peña, J.A.; Rodero, S.; Moreno, J.C.; Morena, J.A. Use of Remote Sensing, Geophysical Techniques and Archaeological Excavations to Define the Roman Amphitheater of Torreparedones (Córdoba, Spain). Remote Sens. 2019, 11, 2937. [Google Scholar] [CrossRef]
- Mozzi, P.; Fontana, A.; Ferrarese, F.; Ninfo, A.; Campana, S.; Francese, R. The Roman City of Altinum, Venice Lagoon, from Remote Sensing and Geophysical Prospection. Archaeol. Prospect. 2016, 23, 27–44. [Google Scholar] [CrossRef]
- Brooke, C.; Clutterbuck, B. Mapping Heterogeneous Buried Archaeological Features Using Multisensor Data from Unmanned Aerial Vehicles. Remote Sens. 2020, 12, 41. [Google Scholar] [CrossRef]
- Kalayci, T.; Lasaponara, R.; Wainwright, J.; Masini, N. Multispectral Contrast of Archaeological Features: A Quantitative Evaluation. Remote Sens. 2019, 11, 913. [Google Scholar] [CrossRef]
- Trinks, I.; Hinterleitner, A.; Neubauer, W.; Nau, E.; Löcker, K.; Wallner, M.; Gabler, M.; Filzwieser, R.; Wilding, J.; Schiel, H.; et al. Large-Area High-Resolution Ground-Penetrating Radar Measurements for Archaeological Prospection. Archaeol. Prospect. 2018, 25, 171–195. [Google Scholar] [CrossRef]
- Vicente-Saez, R.; Martinez-Fuentes, C. Open Science Now: A Systematic Literature Review for an Integrated Definition. J. Bus. Res. 2018, 88, 428–436. [Google Scholar] [CrossRef]
- Reilly, P. Towards a Virtual Archaeology Scenario Analysis for Strategic Digital Archaeological Knowledge Management View Project. In Computer Applications and Quantitative Methods in Archaeology 1990; BAR International Series 565; Lockyear, K., Rahtz, S., Orton, C., Reilly, P., Lock, G., Richards, J., Ryan, N., Eds.; Tempus Reparatum: Oxford, UK, 1991; pp. 132–139. [Google Scholar]
- Denard, H. Implementing Best Practice in Cultural Heritage Visualisation: The London Charter. In Good Practice in Archaeological Diagnostics: Non-Invasive Survey of Complex Archaeological Sites; Corsi, C., Slapšak, B., Vermeulen, F., Eds.; Springer International Publishing: Cham, Switzerland, 2013; pp. 255–268. ISBN 978-3-319-01784-6. [Google Scholar]
- Carta per la conservazione del patrimonio digitale. In Proceedings of the 32nd General Conference UNESCO, Paris, France, 29 September–17 October 2003.
- López-Menchero, V.M.; Grande, A.B. The Principles of the Seville Charter. Proceedings of CIPA SYMPOSIUM 23, Prague, Czech Republic, 12 September–16 September 2011. [Google Scholar]
- Paliou, E.; Corsi, C. “The Whole Is More than the Sum of Its Parts”-Geospatial Data Integration, Visualisation and Analysis at the Roman Site of Ammaia (Marvão, Portugal). In Proceedings of the Archaeology in the Digital Era: Papers from the 40th Annual Conference of Computer Applications and Quantitative Methods in Archaeology (CAA), Southampton, UK, 26–30 March 2012; pp. 592–607. [Google Scholar]
- Malfitana, D.; Leucci, G.; Fragalà, G.; Masini, N.; Scardozzi, G.; Santagati, C.; Cacciaguerra, G.; Shehi, E. Visualizing the Invisible: Digital Restitution from an Integrated Archaeological, Remote Sensing, and Geophysical Research of a Late Roman Villa in Durres (Albania). In Proceedings of the 2013 Digital Heritage International Congress (DigitalHeritage), Marseille, France, 28 October–1 November 2013; Volume 2, pp. 511–517. [Google Scholar]
- Bornik, A.; Neubauer, W. 3D Visualization Techniques for Analysis and Archaeological Interpretation of GPR Data. Remote Sens. 2022, 14, 1709. [Google Scholar] [CrossRef]
- Cukavac, M.; Klemčić, G.; Lazović, Č. Reconstruction of Buried Objects by Implementation of Ground Penetrating Radar Technique: Example on Roman Tomb in Brestovik (Serbia); St. Ivan Rilski: Sofia, Bulgaria, 2008. [Google Scholar]
- Malfitana, D.; Leucci, G.; Fragalà, G.; Masini, N.; Scardozzi, G.; Cacciaguerra, G.; Santagati, C.; Shehi, E. The Potential of Integrated GPR Survey and Aerial Photographic Analysis of Historic Urban Areas: A Case Study and Digital Reconstruction of a Late Roman Villa in Durrës (Albania). J. Archaeol. Sci. Rep. 2015, 4, 276–284. [Google Scholar] [CrossRef]
- Agrafiotis, P.; Lampropoulos, K.; Georgopoulos, A.; Moropoulou, A. 3D Modelling the invisible using ground penetrating radar. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W3, 33–37. [Google Scholar] [CrossRef]
- de Giorgi, L.; Ferrari, I.; Giuri, F.; Leucci, G.; Scardozzi, G. Integrated Geoscientific Surveys at the Church of Santa Maria Della Lizza (Alezio, Italy). Sensors 2021, 21, 2205. [Google Scholar] [CrossRef]
- Guidi, G.; Gonizzi Barsanti, S.; Micoli, L.L.; Malik, U.S. Accurate Reconstruction of the Roman Circus in Milan by Georeferencing Heterogeneous Data Sources with GIS. Geosciences 2017, 7, 91. [Google Scholar] [CrossRef]
- Barker, G. L’archeologia Del Paesaggio Italiano: Nuovi Orientamenti e Recenti Esperienze. Archeol. Mediev. 1986, 13, 7–30. [Google Scholar] [CrossRef]
- Cambi, F.; Tentennato, N. Introduzione All’archeologia Dei Paesaggi; Carucci: Rome, Italy, 1994. [Google Scholar]
- Kucukkaya, A.G. Photogrammetry and Remote Sensing in Archeology. J. Quant. Spectrosc. Radiat. Transf. 2004, 88, 83–88. [Google Scholar] [CrossRef]
- Campana, S.; Marasco, L.; Pecci, A.; Barba, L.; Piro, S.; Zamuner, D. Integration of Ground Remote Sensing Surveys and Archaeological Excavation to Characterize the Medieval Mound (Scarlino, Tuscany-Italy). ArchéoSciences 2009, 33, 133–135. [Google Scholar] [CrossRef]
- Agudo, P.U.; Pajas, J.A.; Pérez-Cabello, F.; Redón, J.V.; Lebrón, B.E. The Potential of Drones and Sensors to Enhance Detection of Archaeological Cropmarks: A Comparative Study Between Multi-Spectral and Thermal Imagery. Drones 2018, 2, 29. [Google Scholar] [CrossRef]
- Ronchi, D.; Limongiello, M.; Barba, S. Correlation among Earthwork and Cropmark Anomalies within Archaeological Landscape Investigation by Using LiDAR and Multispectral Technologies from UAV. Drones 2020, 4, 72. [Google Scholar] [CrossRef]
- Conyers, L. Nterpreting Ground-Penetrating Radar for Archaeology, 1st ed.; Taylor and Francis: New York 2016. Available online: https://www.perlego.com/book/1570433/interpreting-groundpenetrating-radar-for-archaeology-pdf (accessed on 14 October 2022).
- Conyers, L.B.; Goodman, D. Ground-Penetrating Radar: An Introduction for Archaeologists; C.C.A.Press.: Walnut, CA, USA, 1997. [Google Scholar]
- Garofalo, P. De Agro Pomptino. Giornata Di Studi Sul Territorio Di Cisterna; Edizioni Tored: Tivoli, Italy, 2018. [Google Scholar]
- Urbini, S.; Bottari, C.; Marchetti, M.; Cafarella, L. The Tres Tabernae Archeological Site (Cisterna Di Latina, Italy): New Evidence Revealed through an Integrated Geophysical Investigation. Ann. Geophys. 2010, 53, 5–6. [Google Scholar] [CrossRef]
- Demetrescu, E.; Ferdani, D. From Field Archaeology to Virtual Reconstruction: A Five Steps Method Using the Extended Matrix. Appl. Sci. 2021, 11, 5206. [Google Scholar] [CrossRef]
- Demetrescu, E.; Sala, F. Extended Matrix Project; Zenodo: Geneva, Switzerland, 2022. [Google Scholar]
- Demetrescu, E.; Fanini, B. A White-Box Framework to Oversee Archaeological Virtual Reconstructions in Space and Time: Methods and Tools. J. Archaeol. Sci. Rep. 2017, 14, 500–514. [Google Scholar] [CrossRef]
- Demetrescu, E. Archaeological Stratigraphy as a Formal Language for Virtual Reconstruction. Theory and Practice. J. Archaeol. Sci. 2015, 57, 42–55. [Google Scholar] [CrossRef]
- Barba, S.; Barbarella, M.; di Benedetto, A.; Fiani, M.; Limongiello, M. Comparison of uavs performance for a roman amphitheatre survey: The case of avella (italy). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W11, 179–186. [Google Scholar] [CrossRef]
- Gujski, L.M.; di Filippo, A.; Limongiello, M. Machine learning clustering for point clouds optimisation via feature analysis in Cultural Heritage. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLVI-2/W1-2022, 245–251. [Google Scholar] [CrossRef]
- Barba, S.; Barbarella, M.; di Benedetto, A.; Fiani, M.; Gujski, L.; Limongiello, M. Accuracy Assessment of 3D Photogrammetric Models from an Unmanned Aerial Vehicle. Drones 2019, 3, 79. [Google Scholar] [CrossRef]
- Limongiello, M.; Santoriello, A.; Schirru, G.; Bonaudo, R.; Barba, S. The Amphitheatre of Avella: From Its Origin to Digital. In Proceedings of the IMEKO, International Conference on Metrology for Archaeology and Cultural Heritage, Torino, Italy, 22–24 October 2020. [Google Scholar]
- Parrinello, S.; Picchio, F. Integration and Comparison of Close-Range SFM Methodologies for the Analysis and The Development of the Historical City Center of Bethlehem. Int. Arch. Photogramm. Remote Sen. Spatial Inf. Sci. 2019, 42, 589–595. [Google Scholar] [CrossRef]
- Adamopoulos, E.; Rinaudo, F. Uas-Based Archaeological Remote Sensing: Review, Meta-Analysis and State-of-the-Art. Drones 2020, 4, 46. [Google Scholar] [CrossRef]
- Jin, H.; Eklundh, L. In Situ Calibration of Light Sensors for Long-Term Monitoring of Vegetation. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3405–3416. [Google Scholar] [CrossRef]
- Pix4D Pix4Dmapper. ver. 4.5. Available online: https://www.pix4d.com/product/pix4dmapper-photogrammetry-software/ (accessed on 14 October 2022).
- LLC., A. Agisoft Metashape User Manual: Professional Edition, Version 2. Available online: https://www.agisoft.com/pdf/metashape-pro_2_0_en.pdf (accessed on 22 January 2023).
- Dean, G.; Piro, S. Basic GPR Signal Processing. In GPR Remote Sensing in Archaeology; Springer: Berlin/Heidelberg, Germany, 2013; pp. 37–62. ISBN 978-3-642-31857-3. [Google Scholar]
- Plattner, A.M. GPRPy: Open-Source Ground-Penetrating Radar Processing and Visualization Software. Lead. Edge 2020, 39, 332–337. [Google Scholar] [CrossRef]
- de Angeli, S.; Serpetti, M.; Battistin, F. A Newly Developed Tool for the Post-Processing of GPR Time-Slices in A GIS Environment. Remote Sens. 2022, 14, 3459. [Google Scholar] [CrossRef]
- Skaggs, S.; Powis, T.G.; Rucker, C.R.; Micheletti, G. An Iterative Approach to Ground Penetrating Radar at the Maya Site of Pacbitun, Belize. Remote Sens. 2016, 8, 805. [Google Scholar] [CrossRef]
- Daniels, D.J. Surface-Penetrating Radar; Short Run Press: Exeter, UK, 1996; ISBN 0-85296-862-0. [Google Scholar]
- Malagodi, S.; Orlando, L.; Piro, S.; Rosso, F. Location of Archaeological Structures Using GPR Method: Three-Dimensional Data Acquisition and Radar Signal Processing. Archaeol. Prospect. 1996, 3, 13–23. [Google Scholar] [CrossRef]
- Bernabini, M.; Pettinelli, E.; Pierdicca, N.; Piro, S.; Versino, L. Field Experiments for Characterization of GPR Antenna and Pulse Propagation. J. Appl. Geophy. 1995, 33, 63–76. [Google Scholar] [CrossRef]
- Chun, J.H.; Jacewitz, C.A. Fundamentals of Frequency Domain Migration; SEG Library: Houston, TX, USA, 1981; Volume 46. [Google Scholar]
- Demetrescu, D.; Sala, F. EM-Blender-Tools: V.1.3.2; 2023. Available online: https://github.com/zalmoxes-laran/ExtendedMatrix/blob/main/04_EMF/EM-blender-tools_1.32.zip (accessed on 22 January 2023).
- Hermon, S. Scientific Method, Chaîne Opératoire and Visualization: 3D Modelling as a Research Tool in Archaeology. In Paradata and Transparency in Virtual Heritage; Routledge: London, UK, 2012; pp. 1–10. ISBN 9781315599366. [Google Scholar]
- Harris, E.C. Principles of Archaeological Stratigraphy, 2nd ed.; Academic Press: London, UK, 1989. [Google Scholar]
- Demetrescu, E. Virtual Reconstruction as a Scientific Tool. In Digital Research and Education in Architectural Heritage; Münster, S., Friedrichs, K., Niebling, F., Seidel-Grzesińska, A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 102–116. [Google Scholar]
- Demetrescu, E.; Ferdani, D.; Dell’Unto, N.; Touati, A.-M.L.; Lindgren, S. Reconstructing the Original Splendour of the House of Caecilius Iucundus. A Complete Methodology for Virtual Archaeology Aimed at Digital Exhibition. Scires-It—Sci. Res. Inf. Technol. 2016, 6, 51–66. [Google Scholar] [CrossRef]
- Ferdani, D.; Demetrescu, E.; Cavalieri, M.; Pace, G.; Lenzi, S. 3D Modelling and Visualization in Field Archaeology. From Survey To Interpretation Of The Past Using Digital Technologies. Groma. Doc. Archaeol. 2020, 15, 1–21. [Google Scholar] [CrossRef]
- Demetrescu, E. 3D Survey Collection. 2023. Available online: https://github.com/zalmoxes-laran/3D-survey-collection (accessed on 22 January 2023).
- Aqdus, S.A.; Hanson, W.S.; Drummond, J. The Potential of Hyperspectral and Multi-Spectral Imagery to Enhance Archaeological Cropmark Detection: A Comparative Study. J. Archaeol. Sci. 2012, 39, 1915–1924. [Google Scholar] [CrossRef]
- Czajlik, Z.; Árvai, M.; Mészáros, J.; Nagy, B.; Rupnik, L.; Pásztor, L. Cropmarks in Aerial Archaeology: New Lessons from an Old Story. Remote Sens. 2021, 13, 1126. [Google Scholar] [CrossRef]
- Agapiou, A.; Hadjimitsis, D.G.; Sarris, A.; Georgopoulos, A.; Alexakis, D.D. Optimum Temporal and Spectral Window for Monitoring Crop Marks over Archaeological Remains in the Mediterranean Region. J. Archaeol. Sci. 2013, 40, 1479–1492. [Google Scholar] [CrossRef]
- Casella, V.; Franzini, M.; Gorrini, M.E. Crop Marks Detection through Optical and Multispectral Imagery Acquired by UAV. In Proceedings of the 2018 Metrology for Archaeology and Cultural Heritage (MetroArchaeo), Cassino, Italy, 22–24 October 2018; pp. 173–177. [Google Scholar]
- Calleja, J.F.; Requejo Pagés, O.; Díaz-Álvarez, N.; Peón, J.; Gutiérrez, N.; Martín-Hernández, E.; Cebada Relea, A.; Rubio Melendi, D.; Fernández Álvarez, P. Detection of Buried Archaeological Remains with the Combined Use of Satellite Multispectral Data and UAV Data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 555–573. [Google Scholar] [CrossRef]
- Goodman, D.; Nishimura, Y.; Rogers, J.D. GPR Time Slices in Archaeological Prospection. Archaeol. Prospect. 1995, 2, 85–89. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classical Formal Elements Involved in Geophysics. | EMWgeo Formalization | ||
|---|---|---|---|
| 2D | 3D | Coded Units | Color Code |
| GPR anomalies | / | USD | Orange |
| Interpretive lines | Interpretive Volumes | USV/s | Blue |
| Volumes depicting potential entire buildings | USV/n | Green | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ronchi, D.; Limongiello, M.; Demetrescu, E.; Ferdani, D. Multispectral UAV Data and GPR Survey for Archeological Anomaly Detection Supporting 3D Reconstruction. Sensors 2023, 23, 2769. https://doi.org/10.3390/s23052769
Ronchi D, Limongiello M, Demetrescu E, Ferdani D. Multispectral UAV Data and GPR Survey for Archeological Anomaly Detection Supporting 3D Reconstruction. Sensors. 2023; 23(5):2769. https://doi.org/10.3390/s23052769
Chicago/Turabian StyleRonchi, Diego, Marco Limongiello, Emanuel Demetrescu, and Daniele Ferdani. 2023. "Multispectral UAV Data and GPR Survey for Archeological Anomaly Detection Supporting 3D Reconstruction" Sensors 23, no. 5: 2769. https://doi.org/10.3390/s23052769
APA StyleRonchi, D., Limongiello, M., Demetrescu, E., & Ferdani, D. (2023). Multispectral UAV Data and GPR Survey for Archeological Anomaly Detection Supporting 3D Reconstruction. Sensors, 23(5), 2769. https://doi.org/10.3390/s23052769