



Characterization of the Ability of Low-Cost GNSS Receiver to Detect Spoofing Using Clock Bias


Abstract
1. Introduction
2. GNSS Spoofing and Detection Techniques
2.1. GNSS Spoofing
- The “simple” GNSS signal simulators.
- The receiver-based spoofers.
- The sophisticated receiver-based spoofers.
2.2. Spoofing Detection Techniques
- Signal-processing-based techniques focus on the signal characteristics to detect abnormal behavior or distortions. In [4], different detection metrics used in signal processing techniques were listed. Most techniques monitor the received power, since a basic spoofing attack adds signals, which will increase the received power. Akos et al. [7] showed that a spoofing attack causes high variations of the gain level of the receiver’s Automatic Gain Control (AGC). Hence, monitoring the AGC seems to be a good idea to detect GNSS spoofing. However, focusing only on received power does not allow the detection of more subtle spoofing attacks, such as a spoofer using low-power signals. Monitoring both the received power and the distortions of the correlation function can counter this issue. A version of a “Power-Distortion” (PD) detector in [8] showed good results at detecting GNSS interferences and can also be used to classify them. This last feature was improved in [9] by using maximum likelihood estimation as a distortion detector instead of the symmetric difference.
- Encryption-based techniques are mainly based on authentication. Curran et al. [10] carried out an overview of the coding schemes in GNSS in order to highlight that the use of authentication codes in the GNSS signals could increase the system integrity. An interesting approach suggested by Psiaki et al. [11] exploits the similarities between the civil and military GPS signals to detect spoofing. However, this kind of solution is not easy to implement.
- Geometry-based detection techniques look for the direction of arrival of the signals. This can be achieved by using multiple antennas and/or multiple receivers. Montgomery et al. [12] used two antennas with a single receiver to calculate the angle of arrival of the signals, but this required dedicated hardware. A similar approach was successfully implemented with Commercial-Off-The-Shelf (COTS) components in [13,14], where two COTS receivers with one antenna each were used.
- Drift-monitoring techniques mainly focus on unexpected changes of other metrics available on a GNSS receiver, which are the clock or the position. Marnach et al. [15] focused on the clock bias of a GPS receiver to detect meaconing (a simplified form of spoofing) attacks, and Liu et al. [16] worked on the influence of spoofing attacks on the pseudo-ranges and the clock bias.
- Mixed techniques consist of combining two or more techniques from the groups described previously to complement each other. Mixing GNSS-based detection techniques with other information coming from other sensors also belongs in this group. The most-common idea is to use an Inertial Measurement Unit (IMU) to exploit inertial measurements to compare with the positioning given by the GNSS data. Zou et al. [17] modeled the behavior of a UAV and compared it to the real positioning information coming from the IMU and the GPS receiver. Panice et al. [18] and Tanil et al. [19] used data fusion between the IMU and GPS and focused on the detection of the abnormal results of the data fusion to detect spoofing attacks.
3. GNSS Receiver’s Clock
3.1. Computation of a GNSS Position
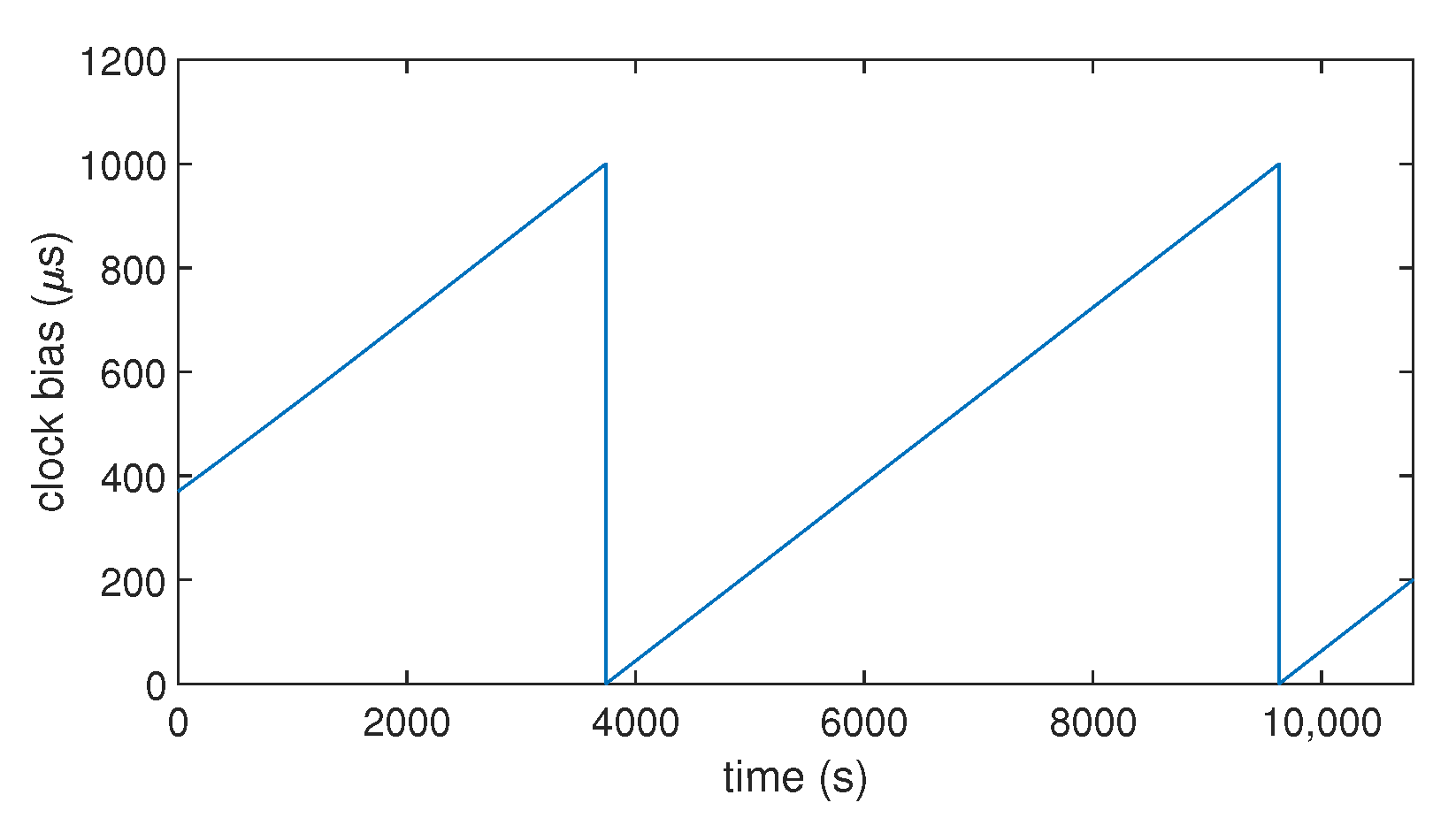
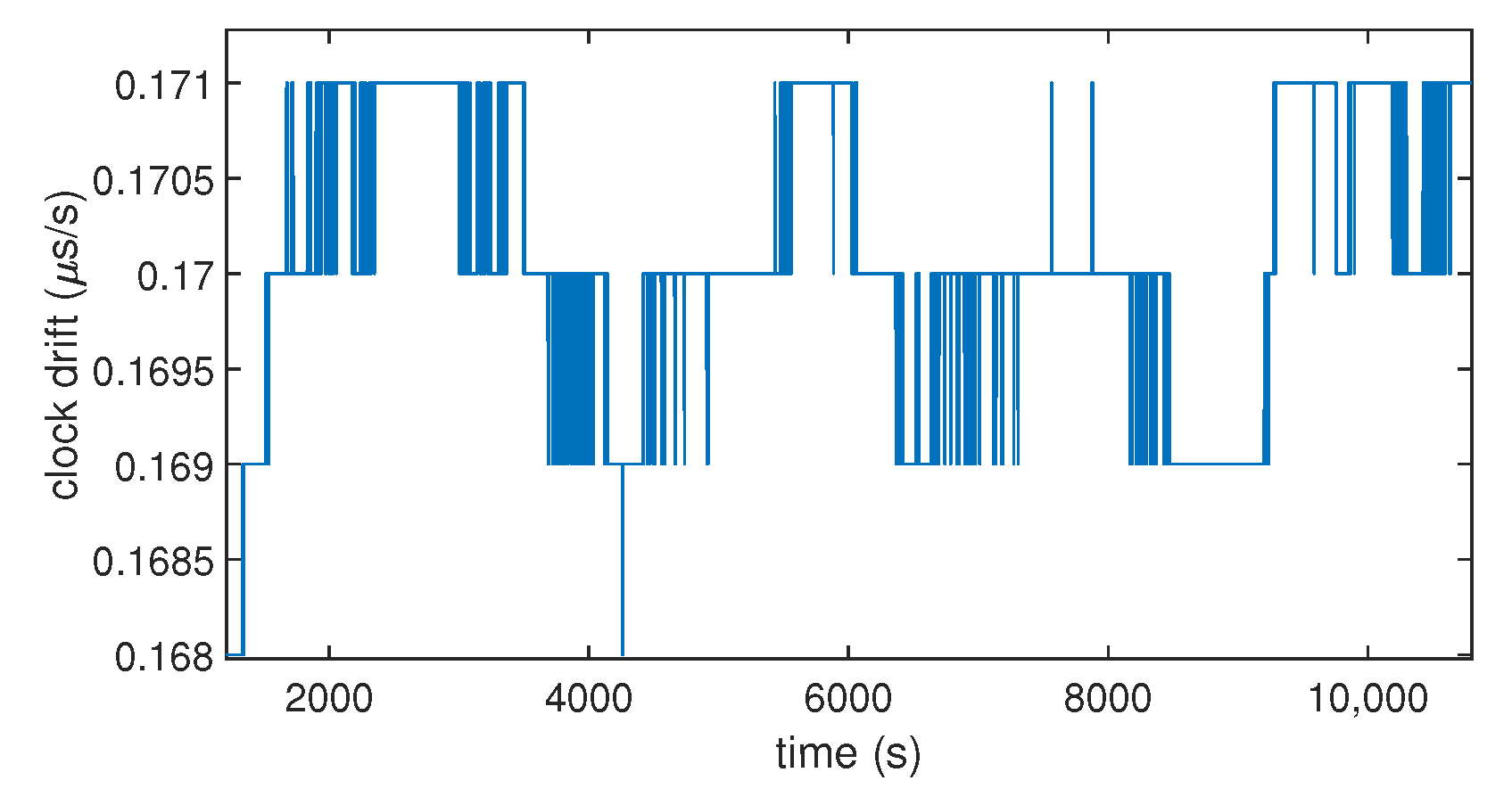
3.2. Clock Bias Computation and Usual Behavior
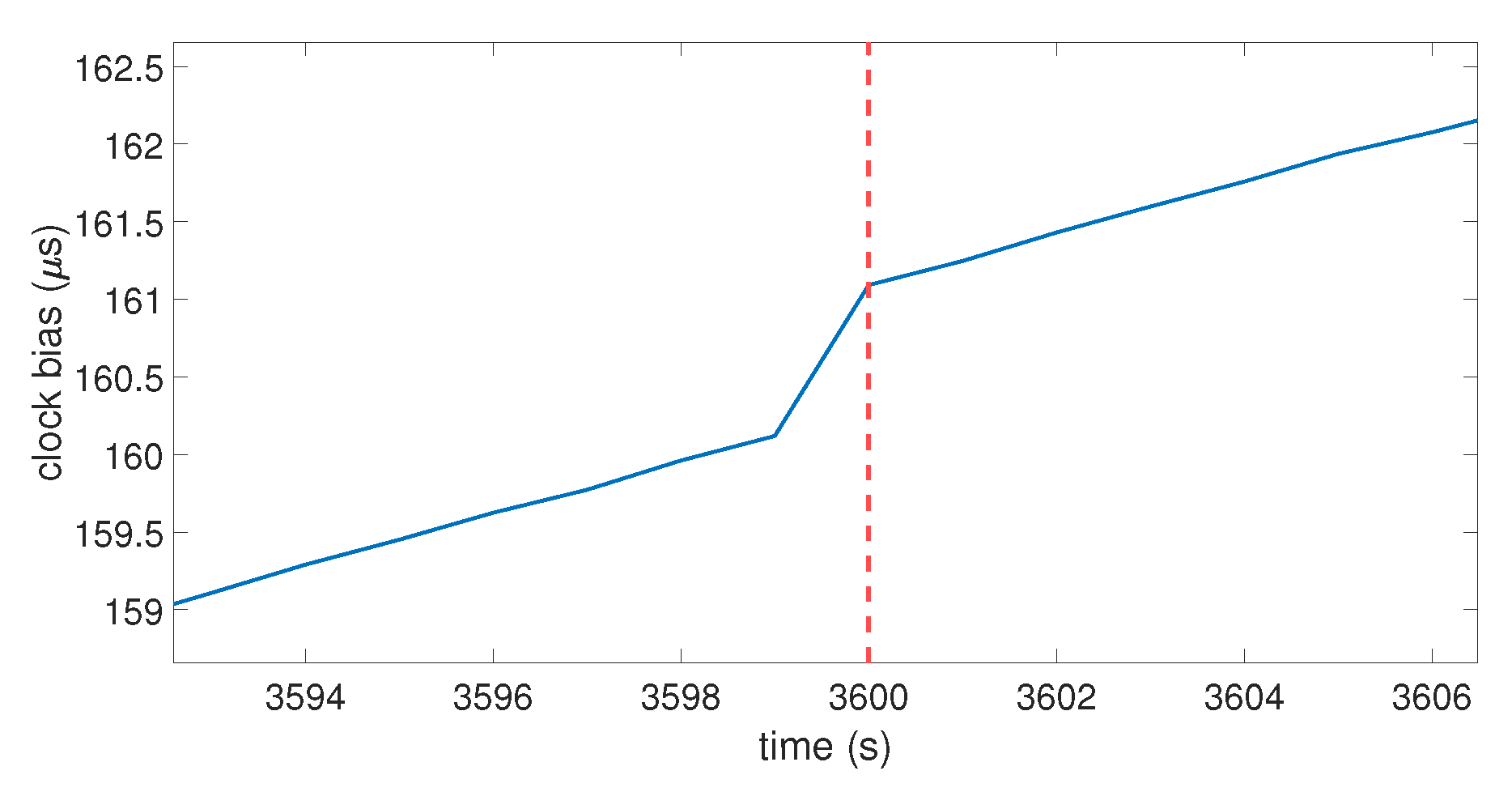
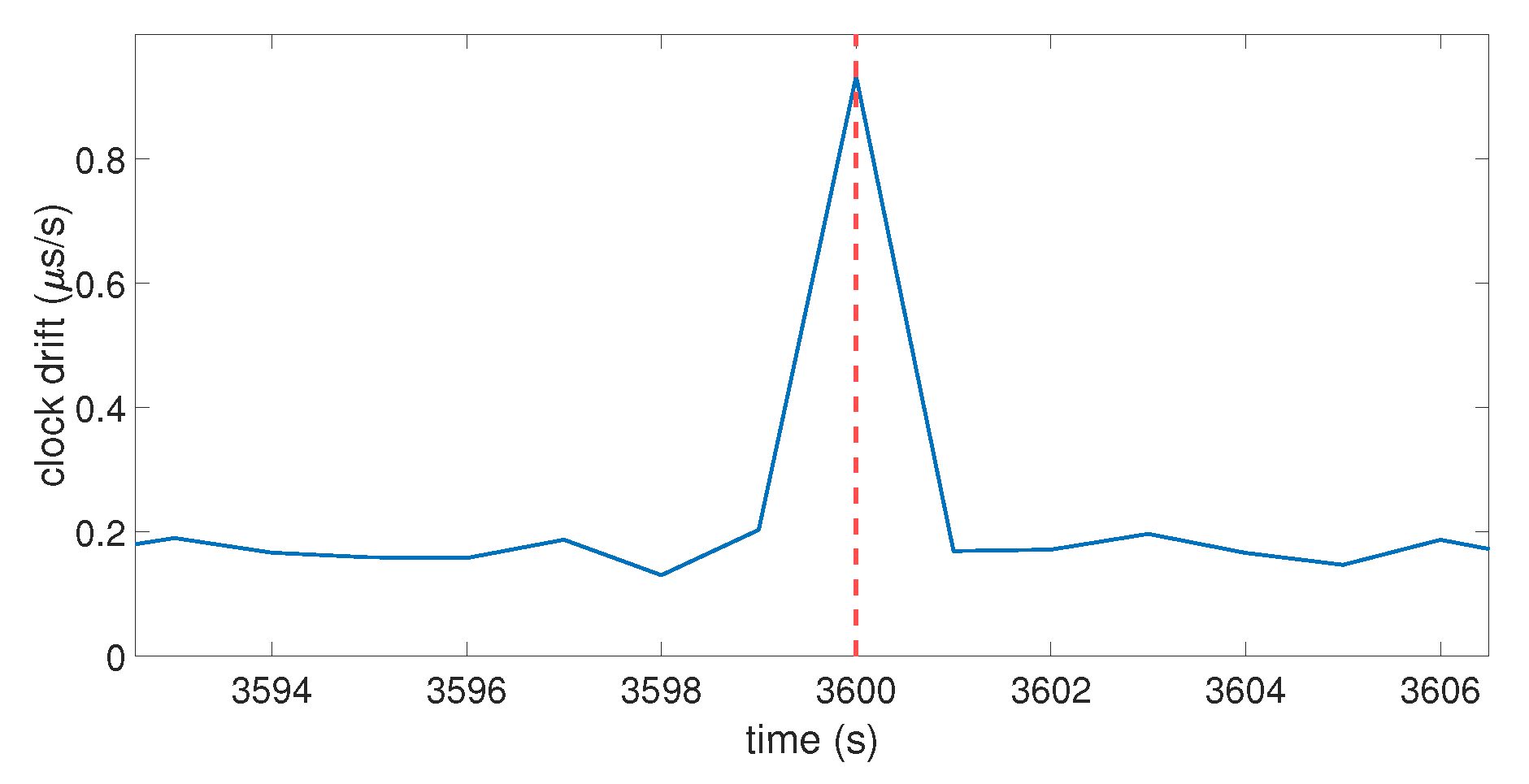
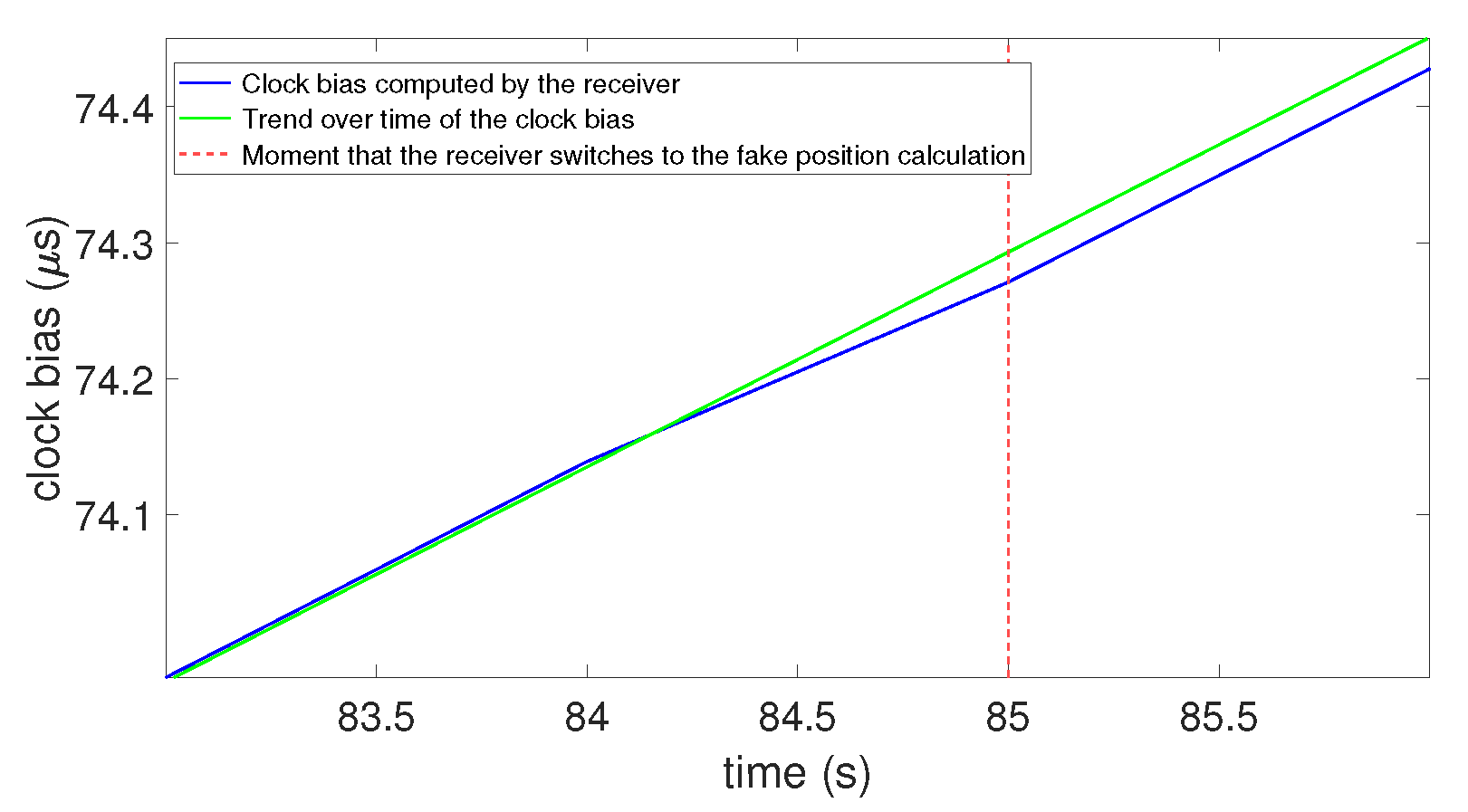
3.3. Spoofer Influence on the Clock Bias
3.4. Simplified Model Approach
3.5. Influence of the Different Parameters
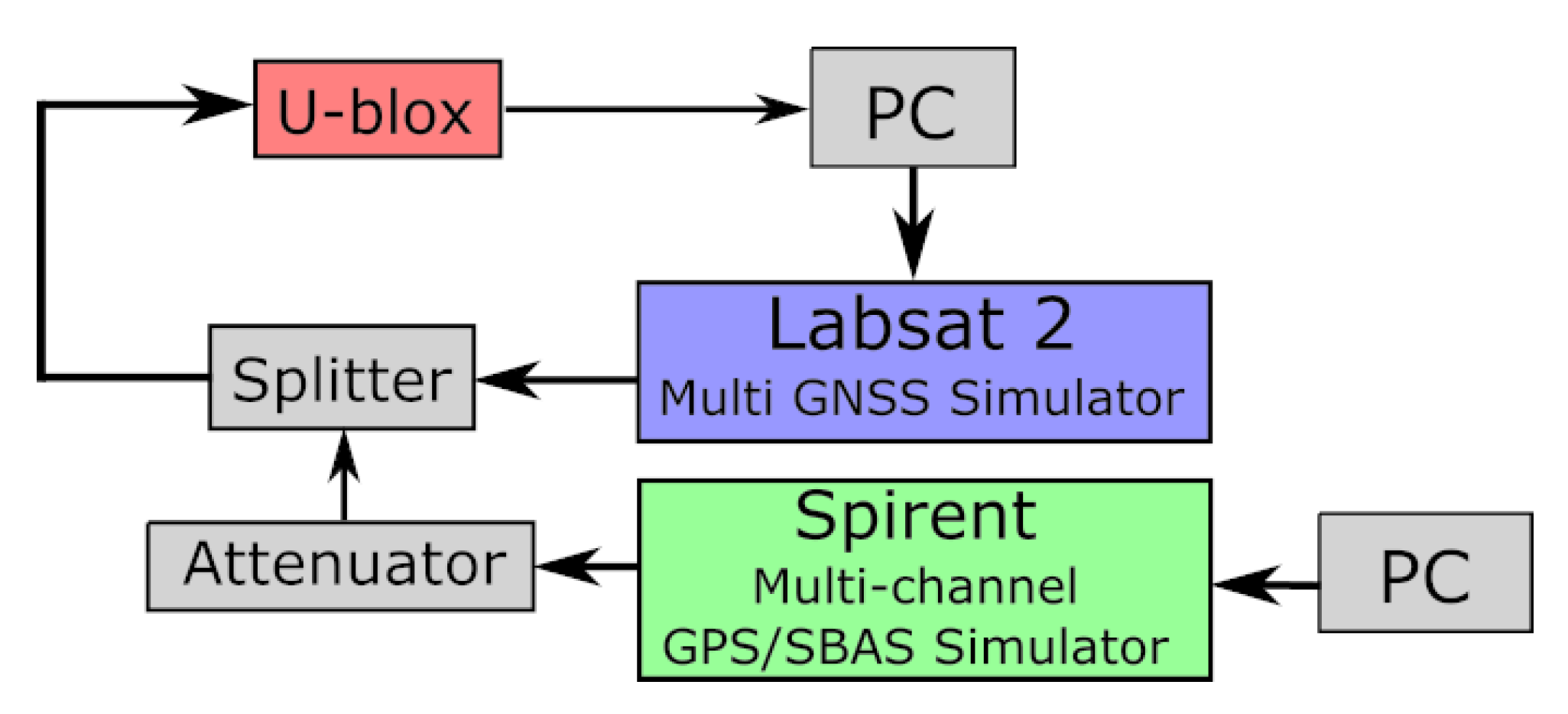
4. Spoofing Experiments on a Commercial GNSS Receiver and Detection Characterization
4.1. Fixed Spoofing Attack Using Two Different Clocks
- The Larger Power (LP) of the spoofer compared to the “true” signals.
- The Lost True Signal (LTS) to force the receiver to relaunch the signal acquisition process.
- Smooth attack: starts with low-power signals (−65 dBm on the Spirent), which are gradually increased (5 dB by 5 dB) until the target is spoofed.
- Strong attack: starts with high-power signals (−40 dBm on the Spirent).
- Jamming attack: starts with a high-power noise to jam the target before broadcasting the spoof signals (−65 dBm on the Spirent).
- Acquisition mode: similar to the smooth attack, but the receiver is forced into acquisition mode at each rise in power (5 dB by 5 dB).
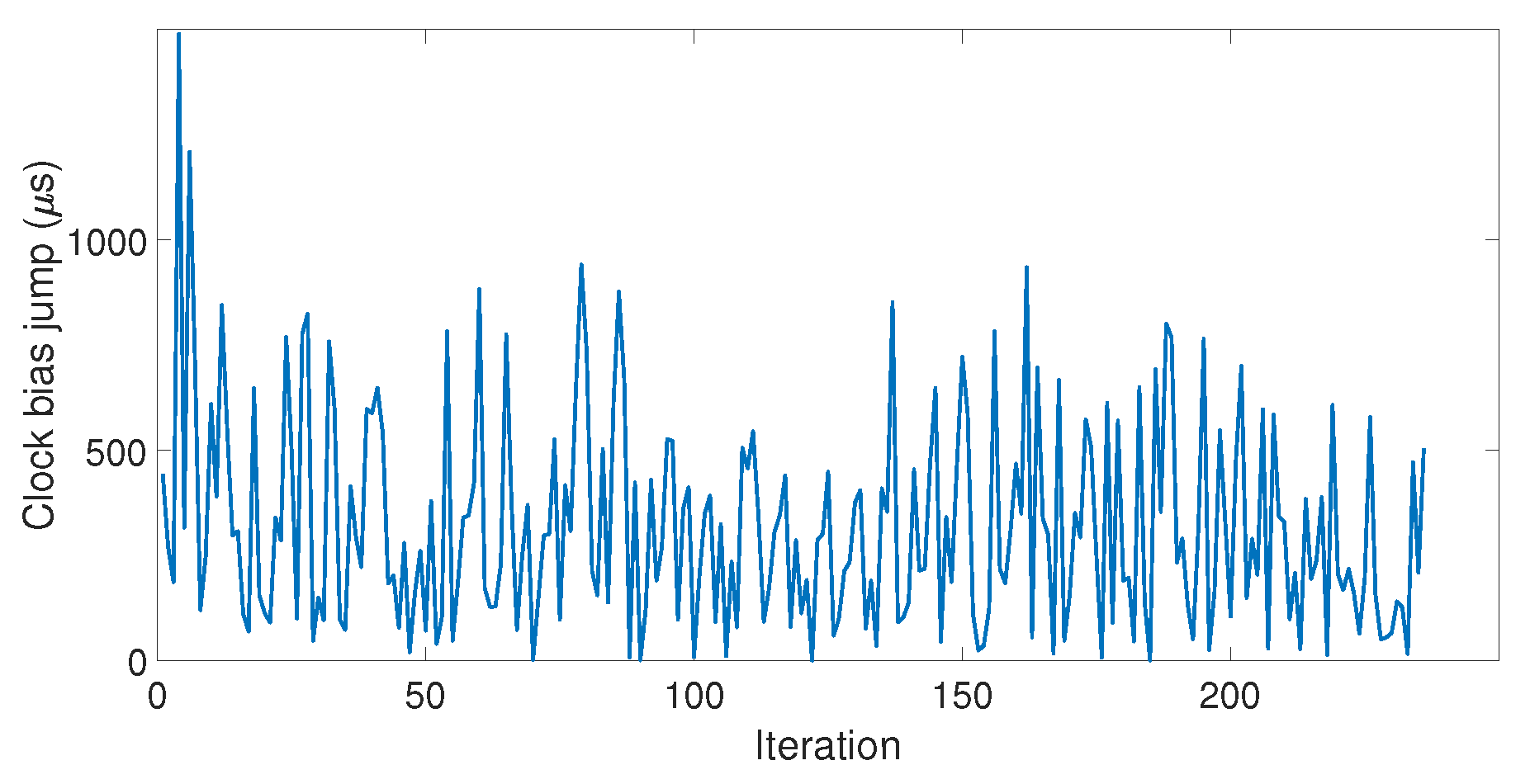
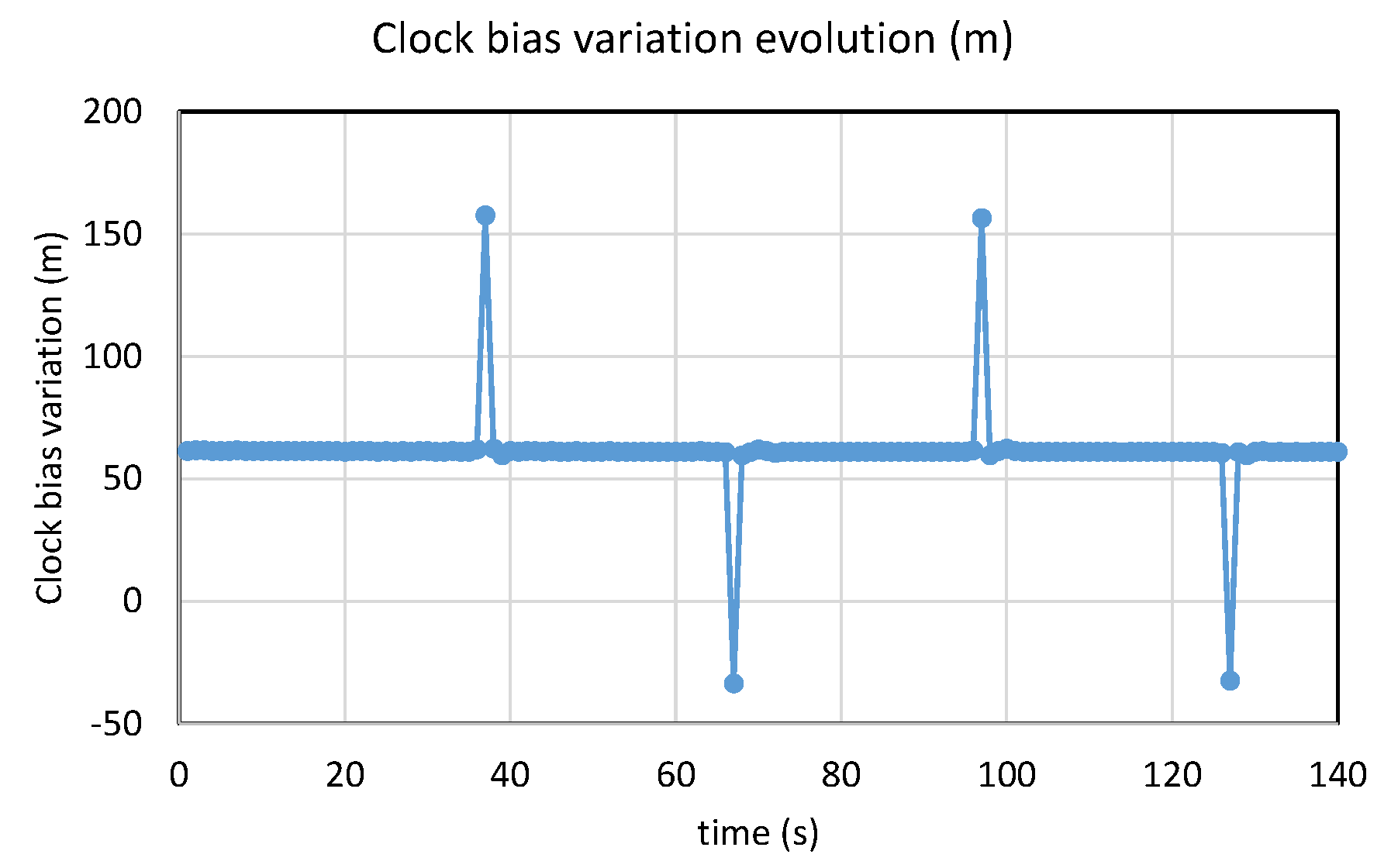
4.2. Results of Successive Iterations of a Fixed Spoofing Attack
5. Single Clock Attack and Characterization Method
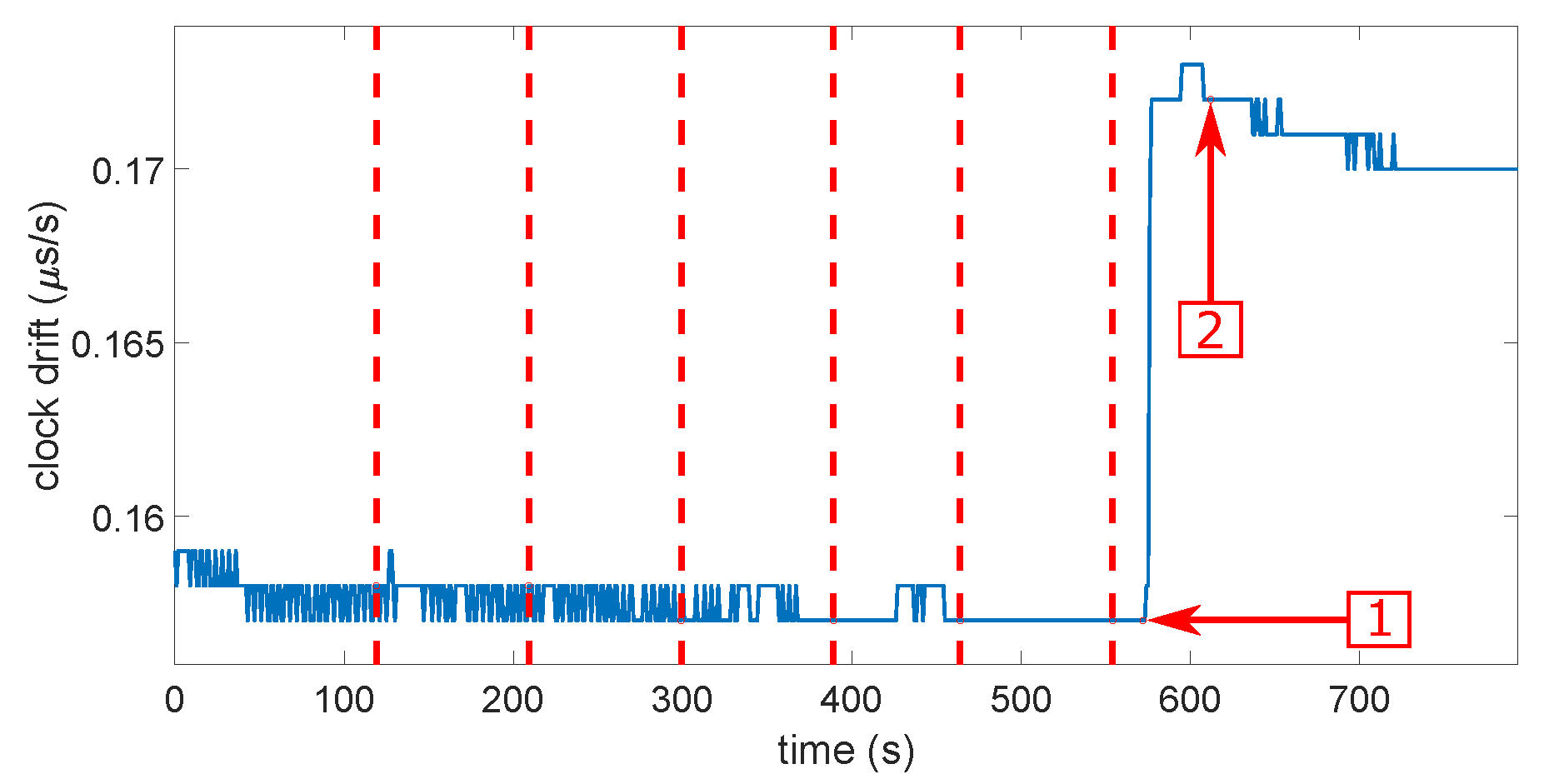
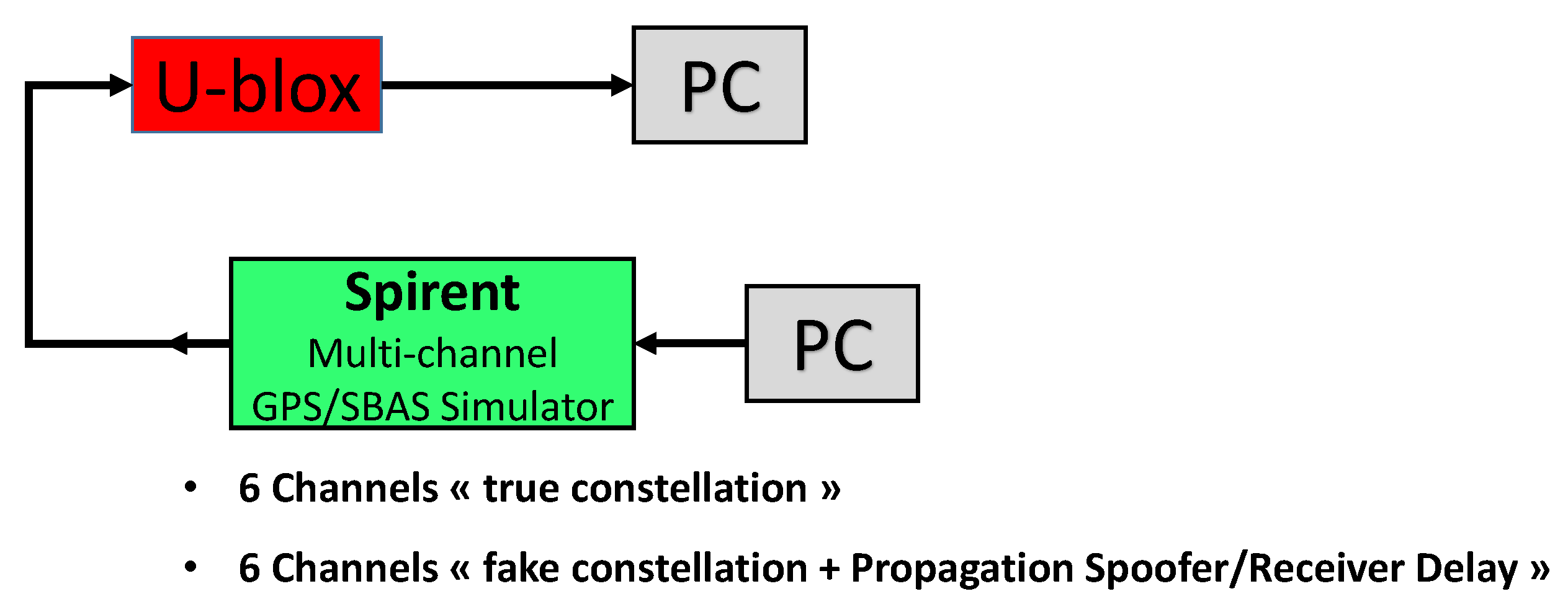
5.1. Fixed Spoofing Attack Using a Single Clock
- At s: start of the simulation, 6 true constellation channels on, 6 spoofer constellation channels off;
- At s: 6 spoofer constellation channels on with 10 dB of power more than the 6 true constellation channels.
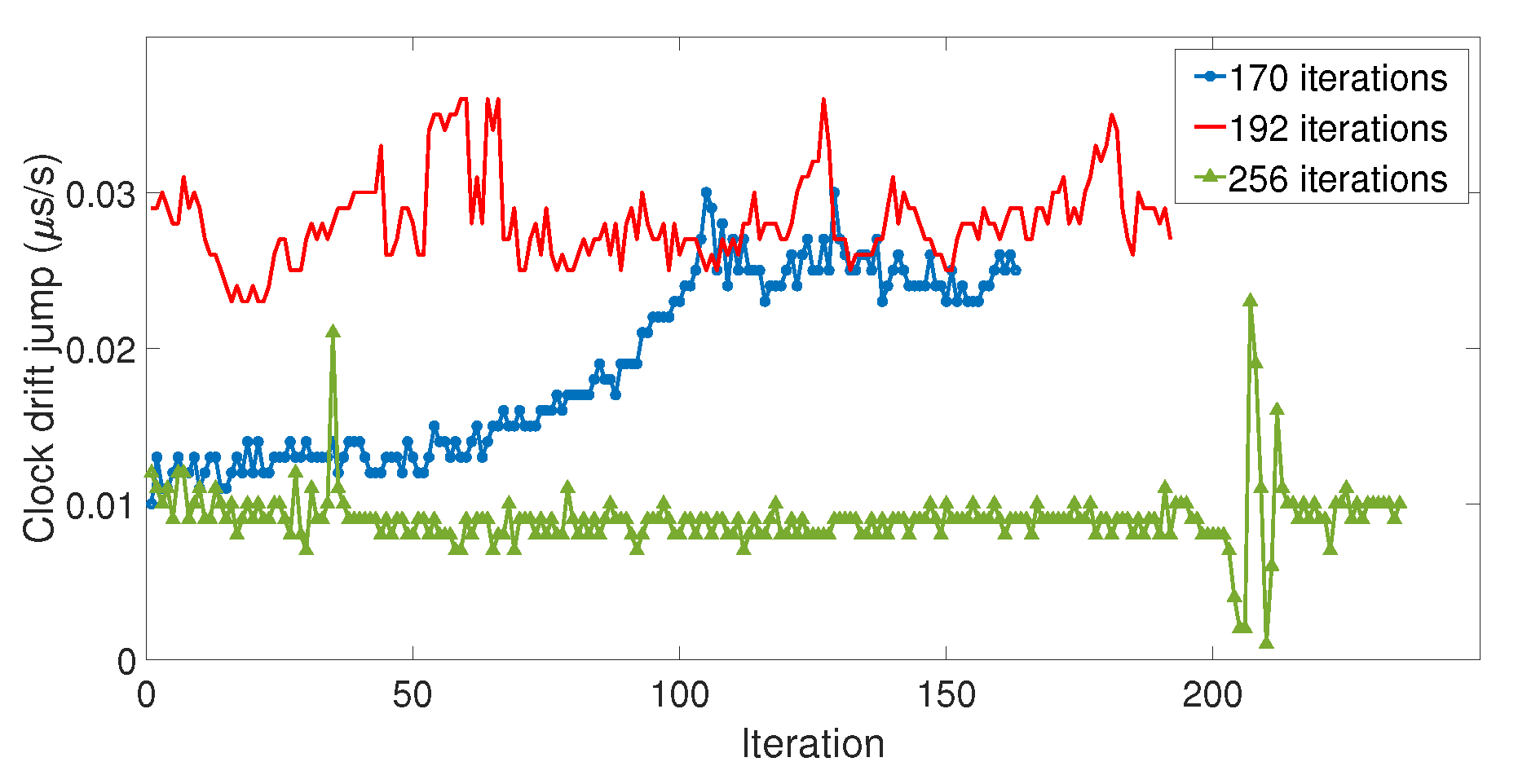
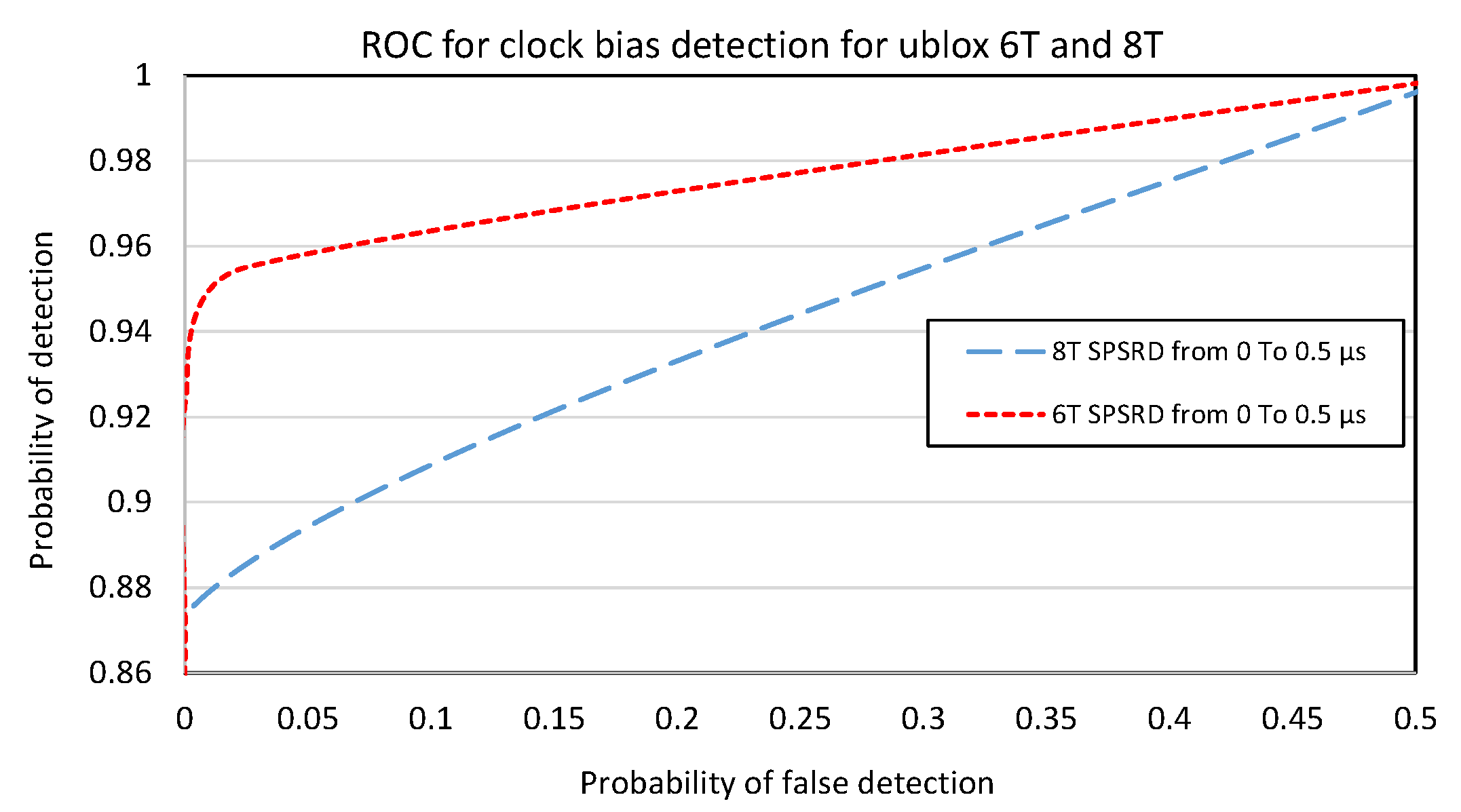
5.2. Determination of the Receiver Operating Characteristic of Clock Bias Jump Detection
- First step: Determine the mean level of the C/N0 for which the curve will be determined.
- Second step: Choose the minimum and maximum values of the interval of the SPSRD that will be studied. Generally, we took 0 s for the first one, which is very in favor of the attacker. The second value depends on the maximum expected distance and/or clock difference between the spoofer constellation and the real one.
- Third step: Carry out the same experimentation as in Section 5.1, changing the SPSRD, and gather the result after several tests according to the expected accuracy (each experimentation can be repeated a minimum of 10 times to 100 times).
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AGC | Automatic Gain Control |
| COST | Commercial-Off-The-Shelf |
| ECDF | Empirical Cumulative Distribution Function |
| ECEF | Earth-Centered Earth-Fixed |
| GLONASS | GLObal NAvigation Satellite System |
| GNSS | Global Navigation Satellite System |
| GPS | Global Positioning System |
| IMU | Inertial Measurement Units |
| PD | Power Distortion |
| RAIM | Receiver Autonomous Integrity Monitoring |
| SV | Space Vehicle |
| TCXO | Temperature-Compensated Crystal Oscillator |
| TOA | Time Of Arrival |
| UAV | Unmanned Aerial Vehicles |
References
- Kaplan, E.D.; Hegarty, C. (Eds.) Understanding GPS: Principles and Applications, 2nd ed.; Artech House Mobile Communications Series; Artech House: Boston, MA, USA, 2006. [Google Scholar]
- Jafarnia-Jahromi, A.; Broumandan, A.; Nielsen, J.; Lachapelle, G. GPS Vulnerability to Spoofing Threats and a Review of Antispoofing Techniques. Int. J. Navig. Obs. 2012, 2012, 1–16. [Google Scholar] [CrossRef]
- Psiaki, M.L.; Humphreys, T.E. GNSS Spoofing and Detection. Proc. IEEE 2016, 104, 1258–1270. [Google Scholar] [CrossRef]
- Broumandan, A.; Siddakatte, R.; Lachapelle, G. An Approach to Detect GNSS Spoofing. IEEE Aerosp. Electron. Syst. Mag. 2017, 32, 64–75. [Google Scholar] [CrossRef]
- Shepard, D.P.; Bhatti, J.A.; Humphreys, T.E.; Fansler, A.A. Evaluation of Smart Grid and Civilian UAV Vulnerability to GPS Spoofing Attacks. In Proceedings of the 25th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 3591–3605. [Google Scholar]
- Humphreys, T.E.; Ledvina, B.M.; Tech, V.; Psiaki, M.L.; O’Hanlon, B.W.; Kintner, P.M. Assessing the Spoofing Threat: Development of a Portable GPS Civilian Spoofer. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008; pp. 2314–2325. [Google Scholar]
- Akos, D.M. Who’s Afraid of the Spoofer? GPS/GNSS Spoofing Detection via Automatic Gain Control (AGC): Spoofing Detection via Automatic Gain Control. Navigation 2012, 59, 281–290. [Google Scholar] [CrossRef]
- Wesson, K.D.; Gross, J.N.; Humphreys, T.E.; Evans, B.L. GNSS Signal Authentication Via Power and Distortion Monitoring. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 739–754. [Google Scholar] [CrossRef]
- Gross, J.N.; Kilic, C.; Humphreys, T.E. Maximum-Likelihood Power-Distortion Monitoring for GNSS-Signal Authentication. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 469–475. [Google Scholar] [CrossRef]
- Curran, J.T.; Navarro, M.; Anghileri, M.; Closas, P.; Pfletschinger, S. Coding Aspects of Secure GNSS Receivers. Proc. IEEE 2016, 104, 1271–1287. [Google Scholar] [CrossRef]
- Psiaki, M.L.; O’Hanlon, B.W.; Bhatti, J.A.; Shepard, D.P.; Humphreys, T.E. GPS Spoofing Detection via Dual-Receiver Correlation of Military Signals. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 18. [Google Scholar] [CrossRef]
- Montgomery, P.; Humphreys, T.; Ledvina, B. Receiver-Autonomous Spoofing Detection: Experimental Results of a Multi-Antenna Receiver Defense Against a Portable Civil GPS Spoofer. In Proceedings of the 2009 International Technical Meeting of The Institute of Navigation, Savannah, GA, USA, 22–25 September 2009; Volume 1, pp. 124–130. [Google Scholar]
- Borio, D.; Gioia, C. A Dual-Antenna Spoofing Detection System Using GNSS Commercial Receivers. In Proceedings of the 28th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 325–330. [Google Scholar]
- Borio, D.; Gioia, C. A Sum-of-Squares Approach to GNSS Spoofing Detection. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1756–1768. [Google Scholar] [CrossRef]
- Marnach, D.; Mauw, S.; Martins, M.; Harpes, C. Detecting Meaconing Attacks by Analysing the Clock Bias of Gnss Receivers. Artif. Satell. 2013, 48, 63–83. [Google Scholar] [CrossRef]
- Liu, K.; Wu, W.; Wu, Z. Using the Receiver Clock Offset Abnormal to Prove the Existence of Spoofing Signal. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 4592–4596. [Google Scholar] [CrossRef]
- Zou, Q.; Huang, S.; Lin, F.; Cong, M. Detection of GPS Spoofing Based on UAV Model Estimation. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6097–6102. [Google Scholar] [CrossRef]
- Panice, G.; Luongo, S.; Gigante, G.; Pascarella, D.; Di Benedetto, C.; Vozella, A.; Pescape, A. A SVM-Based Detection Approach for GPS Spoofing Attacks to UAV. In Proceedings of the 2017 23rd International Conference on Automation and Computing (ICAC), Huddersfield, UK, 7–8 September 2017; IEEE: Huddersfield, UK, 2017; pp. 1–11. [Google Scholar] [CrossRef]
- Tanil, C.; Khanafseh, S.; Joerger, M.; Pervan, B. An INS Monitor to Detect GNSS Spoofers Capable of Tracking Vehicle Position. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 131–143. [Google Scholar] [CrossRef]
- Jafarnia-Jahromi, A.; Daneshmand, S.; Broumandan, A.; Nielsen, J.; Lachapelle, G. PVT solution authentication based on monitoring the clock state for a moving GNSS receiver. In Proceedings of the European Navigation Conference (ENC), Vienna, Austria, 23–25 April 2013; Volume 11. [Google Scholar]
- Samama, N. Global Positioning: Technologies and Performance; Wiley Survival Guides in Engineering and Science; Wiley-Interscience: Hoboken, NJ, USA, 2008. [Google Scholar]
- Zeng, K.C.; Liu, S.; Shu, Y.; Wang, D.; Li, H.; Dou, Y.; Wang, G.; Yang, Y. All Your GPS Are Belong To Us: Towards Stealthy Manipulation of Road Navigation Systems. In Proceedings of the 27th USENIX Security Symposium (USENIX Security 18), Baltimore, MD, USA, 15–17 August 2018; USENIX Association: Baltimore, MD, USA, 2018; pp. 1527–1544. [Google Scholar]
- Park, M.; Shin, B.; Han, J.H.; Kim, H.D.; Kee, C. Global Navigation Satellite System Signal Generation Method for Wide Area Protection Against Numerous Unintentional Drones. IEEE Access 2021, 9, 154752–154765. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attack Type | U-Blox Receiver | Drift (s/s) | Bias (s) | C/ (dBHz) |
|---|---|---|---|---|
| Acquisition | u-blox 6 | 0.016 | 1317.3 | 48–50 |
| u-blox 8 | 0.0165 | 498.1 | 48–50 | |
| Smooth | u-blox 6 | 0.0153 | 666.13 | 49–51 |
| u-blox 8 | 0.0163 | 774.53 | 49–51 | |
| Strong | u-blox 6 | 0.0118 | 776.32 | 50–52 |
| u-blox 8 | 0.0178 | 936.02 | 50–52 | |
| Jamming | u-blox 6 | 0.0133 | 393.4 | 41–43 |
| u-blox 8 | 0.018 | 986.2 | 41–43 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Truong, V.; Vervisch-Picois, A.; Rubio Hernan, J.; Samama, N. Characterization of the Ability of Low-Cost GNSS Receiver to Detect Spoofing Using Clock Bias. Sensors 2023, 23, 2735. https://doi.org/10.3390/s23052735
Truong V, Vervisch-Picois A, Rubio Hernan J, Samama N. Characterization of the Ability of Low-Cost GNSS Receiver to Detect Spoofing Using Clock Bias. Sensors. 2023; 23(5):2735. https://doi.org/10.3390/s23052735
Chicago/Turabian StyleTruong, Victor, Alexandre Vervisch-Picois, Jose Rubio Hernan, and Nel Samama. 2023. "Characterization of the Ability of Low-Cost GNSS Receiver to Detect Spoofing Using Clock Bias" Sensors 23, no. 5: 2735. https://doi.org/10.3390/s23052735
APA StyleTruong, V., Vervisch-Picois, A., Rubio Hernan, J., & Samama, N. (2023). Characterization of the Ability of Low-Cost GNSS Receiver to Detect Spoofing Using Clock Bias. Sensors, 23(5), 2735. https://doi.org/10.3390/s23052735