
LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues



Abstract
1. Introduction
1.1. Motivation
1.2. Methodology
1.2.1. Search Strategy
1.2.2. Inclusion and Exclusion Criteria
1.3. Scope
- Providing a breakdown and discussion of the research challenges involved in the implementation of FANETs.
- Exploring the state of the art of using LoRa technology in FANETs.
- Identifying the mobility models, MAC protocols, and routing techniques that are commonly used for the implementation of FANETs using LoRa technology.
2. Overview of LoRa and FANETs
2.1. LoRa and LoRaWAN
2.1.1. LoRa
- A.
- Frequency
- B.
- Bandwidth (BW)
- C.
- Spreading Factor (SF)
- D.
- Coding Rate (CR)
- E.
- Transmission Power

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Magnitude/Range | Chip | Reference |
|---|---|---|---|
| Frequency | 137–175 MHz | SX1276/77/78/79 | [33] |
| 410–525 MHz | SX1276/77/78/79 | [33] | |
| 862–1020 MHz | SX1276/77/79 | [33] | |
| 860–1020 MHz | SX1272/73 | [34] | |
| 410–810 MHz | SX1268 | [35] | |
| 150–960 MHz | SX1261/2 | [36] | |
| 2.4 GHz | SX1280/SX1281 | [37] | |
| Bandwidth (BW) | 7.8 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] |
| 10.4 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 15.6 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 20.8 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 31.2 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 41.7 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 62.5 kHz | SX1276/77/78/79, SX1268, SX1261/2 | [33,35,36] | |
| 125 kHz | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2 | [33,34,35,36] | |
| 250 kHz | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2 | [33,34,35,36] | |
| 500 kHz | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2 | [33,34,35,36] | |
| 203 kHz | SX1280/SX1281 | [37] | |
| 406 kHz | SX1280/SX1281 | [37] | |
| 812 kHz | SX1280/SX1281 | [37] | |
| 1625 kHz | SX1280/SX1281 | [37] | |
| Spreading Factor (SF) | 5 | SX1268, SX1261/2, SX1280/SX1281 | [35,36,37] |
| 6–9 | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| 10–12 | SX1276/78/79, SX1272, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| Coding Rate (CR) | 1 (4/5) | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] |
| 2 (4/6) | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| 3 (4/7) | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| 4 (4/8) | SX1276/77/78/79, SX1272/73, SX1268, SX1261/2, SX1280/SX1281 | [33,34,35,36,37] | |
| Transmission Power | −4 to 20 dBm | SX1276/77/78/79 | [33] |
| −1 to 20 dBm | SX1272/73 | [34] | |
| −17 to 22 dBm | SX1268 | [35] | |
| −17 to 22 dBm | SX1261/2 | [36] | |
| −18 to 12.5 dBm | SX1280/SX1281 | [37] |
2.1.2. LoRaWAN
- A.
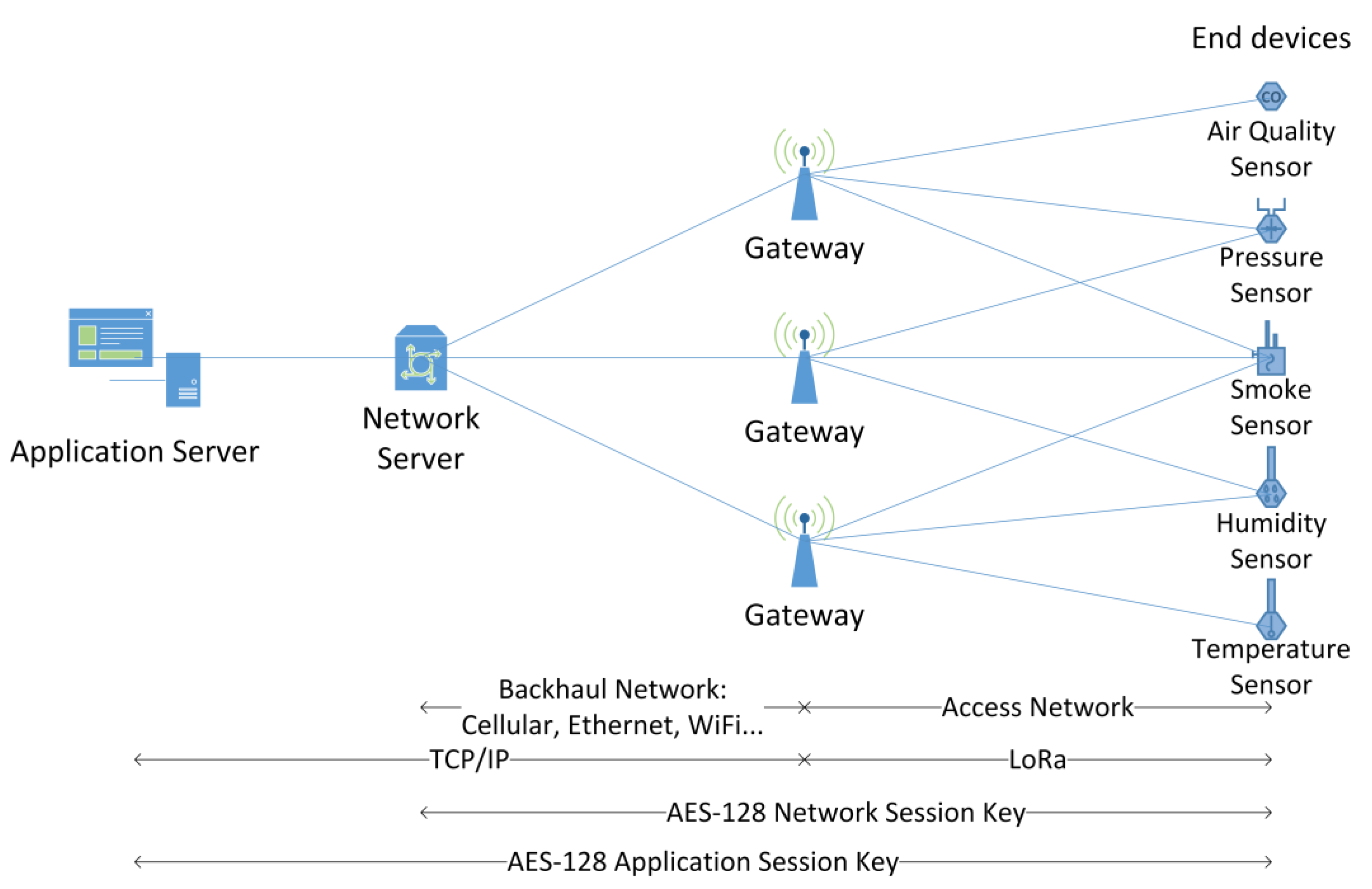
- Architecture
- End devices: Also called nodes; they are usually sensors, actuators, or both, equipped with LoRa transceivers that connect to one or more gateways in a single hop.
- Gateways: They connect the LoRa access network to any standard IP backhaul network to relay data between the end nodes and the network server.
- Network server: It is in charge of routing the data between the end device and the appropriate application server. It also handles network layer security by using AES-128 encryption to authenticate end devices.
- Application server: It manages the application to which the end device data is aimed. It processes the data, presents it to the user, and replies to the end device, if necessary. It also handles application layer security by using AES-128 encryption to keep the end user’s application data confidential to the network operator.
- B.
- Communications
- Class A: The end devices of this class are half-duplex transceivers that implement pure ALOHA for their uplink transmissions, meaning that they transmit when they need to do it, but only after a small random time has elapsed. The receiver remains off, except for two receive windows that open after an uplink transmission. This is the class with the lowest energy consumption, and all LoRaWAN end devices must implement it.
- Class B: This class is meant for applications in which the end device needs to download more traffic than Class A devices. End devices of this class employ all functionalities of Class A, but open additional reception windows (also called ping slots) in a scheduled manner. For these reception windows to work, synchronization is required, which is achieved by the gateway sending periodic beacons to all end nodes.
- Class C: End devices of this class listen continuously except when they are transmitting. As this is the class with the most energy consumption, it is meant for applications that are less power-constrained. End devices of this class also implement all functionalities of Class A but must not enable Class B concurrently.
- Activation by Personalization: The information required by the end device to join a network is statically stored in it. This method is technically simpler, requires access to the end device, and is intended to be used mostly in private networks.
- Over-the-Air Activation: The end device initiates a join procedure by sending an unencrypted Join Request frame to the network server. If the Join Request is accepted, the server responds with an encrypted Join Accept frame. This method is dynamic and can be used in public or private networks.
2.2. Flying Ad Hoc Networks (FANETs)
2.2.1. UAV Taxonomy
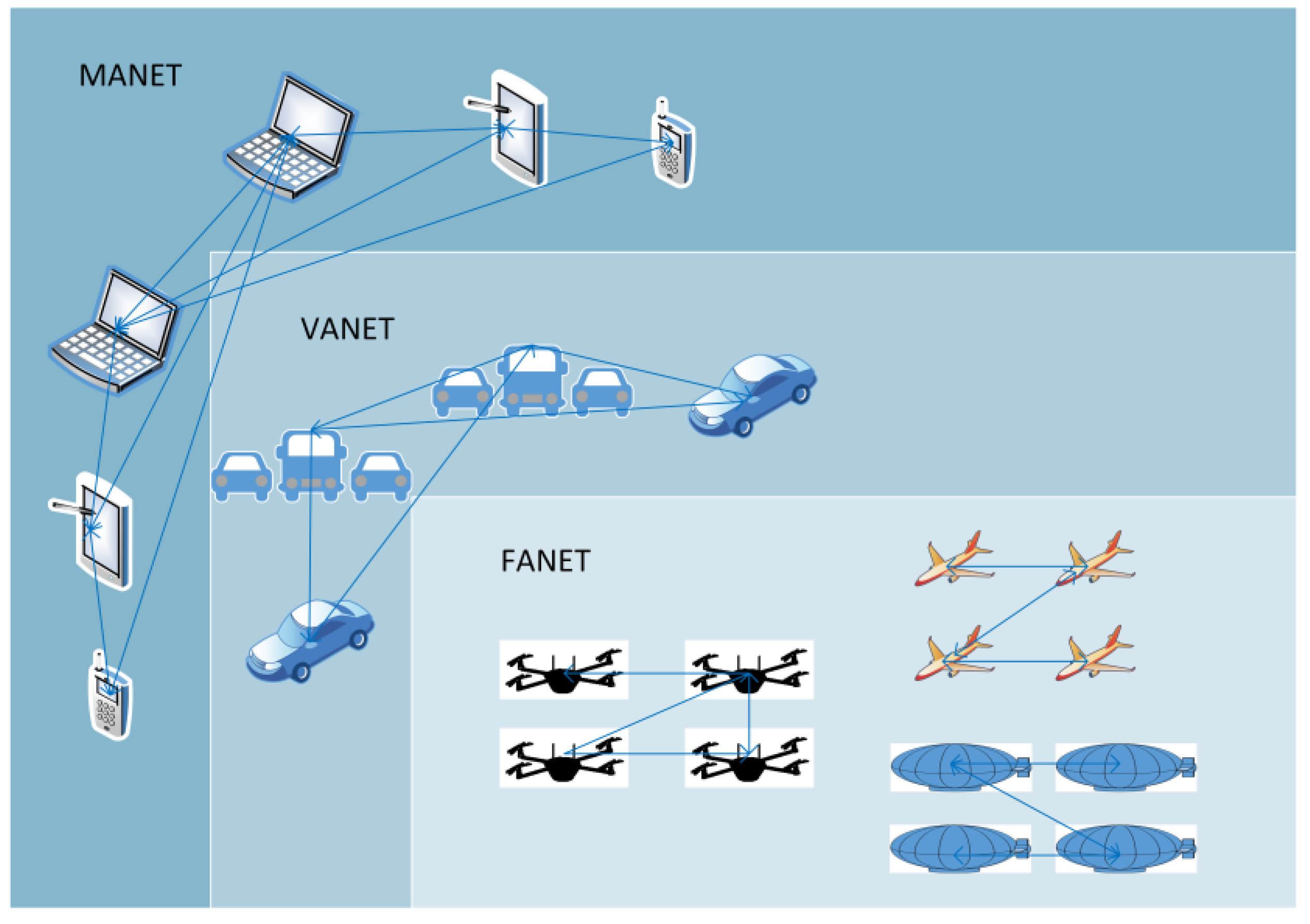
2.2.2. Differences between FANETs, VANETs, and MANETs
- Node mobility: Contrary to the elements of MANETs and ground VANETs, UAVs experience relatively fewer obstacles, which allows them to move in and around three axes with a certain amount of freedom at somewhat constant speeds. However, holding a fixed position can be more challenging, or even impossible, depending on weather conditions and the type of UAV. These circumstances influence the mobility model to be applied but also impact other characteristics, such as node density, topology change rate, localization alternatives, and applicable propagation models.
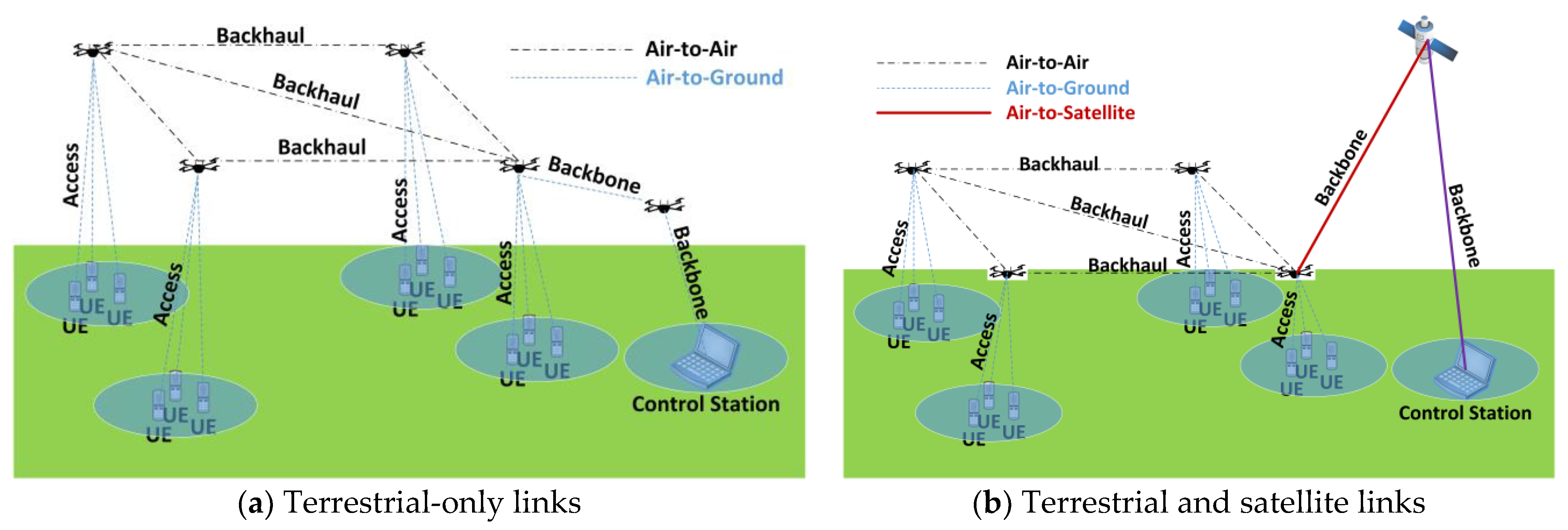
- Radio propagation: The presence of fewer obstacles allows for the consideration of line-of-sight (LoS) propagation while taking into account weather conditions and the Doppler effect caused by the speed of UAVs relative to the ground and to one another. Air-to-air and air-to-ground are the two main types of links that can be identified, although air-to-satellite links might also be considered for some applications.
- Energy constraints: They depend on the type of UAV. Battery-powered UAVs are more energy-constrained, making it useful to have communication hardware that consumes less power, allowing for increased flight time, although most of the energy is dedicated to keeping the UAV and its payload in the air. Large fixed-wing UAVs are most likely powered by combustion engines that can carry and charge larger batteries, making them less energy-constrained.
| Characteristic | MANET | VANET (Ground) | FANET |
|---|---|---|---|
| Elements [45] | Mobile phones [45] | Vehicles [45] | UAVs, airplanes [45], balloons, HAPs |
| Node speed [41,42,45] | 6 km/h [41,42] 0–1.5 m/s [45] | 20–130 km/h [41] 20–100 km/h [42] 4–36 m/s [45] | 6–460 km/h [41] 50–100 km/h [42] 8–257 m/s [45] |
| Node mobility [41,42,43,44] | Consistent, 2D, Random trajectories, Low [41] Lower (2D) [42] Relatively slow compared to VANET and FANET [44] | Consistent, 2D, Random trajectories, High [41] Low (2D) [42] | Free, 3D, Either random or predefined trajectories, very high [41] Medium to high (3D) [42] Faster than MANET and VANET [43] Much higher than MANET and VANET [44] |
| Node density [43,44,45] | Dense [45] | Dense in cities and sparse in rural areas [45] | Much lower than MANET and VANET [43,44] Mission-dependent [45] |
| Mobility model [41,42,43,44] | Random [42] Random Way Point (RWP) [44] | Manhattan Models [42] High predictability [44] | RWP, Paparazzi (PPRZM) [41,42] Predetermined, random [43] Predetermined, random, Semi-Random Circular Movement (SRCM), Pheromone map [44] |
| Topology change [41,42,43,44] | Dynamic, unpredictable [41] Low [42] | Linear movement but more progressive than VANET [41] Medium [42] | Stationary, Slow and Fast [41] High [42] More frequent than MANET or VANET and related to node mobility/availability [43] |
| Propagation model [41,42,43,44,45] | Non-Line-of-Sight (NLoS) [41,44] Rayleigh [45] | Non-Line-of-Sight (NLoS) [41,44] Rayleigh/Rician [45] | Line-of-Sight (LoS) [41,43,44] Friis, Rice, Log-Normal [42] Rayleigh/Rician [45] |
| Energy constraints [41,42,43,44,45] | Medium [41,42] Constraint [45] | Low [41,42] Non-constraint [45] | Medium to High [41,42] Low to High depending on the type of UAV [43] High for mini-UAVs [44] Constraint/ Non-constraint [45] |
| Computational power [41,44] | Limited [41,44] | High [41,44] | High [41,44] |
| Localization [41,43,44] | Global Positioning System (GPS) [41,44] | GPS/Assisted GPS (AGPS) [41,44] Differential GPS (DGPS) [44] | GPS/AGPS (Assisted Global Positioning System) [41,44] DGPS, Inertial Measurement Unit (IMU) [44] |
3. Critical Review
3.1. Communications
3.1.1. Architecture
- Most communications take place inside the swarms.
- The communication with the base station is less frequent or takes place at low data rates.
- The UAV that handles the link to the base station is a single point of failure and may become a bottleneck.
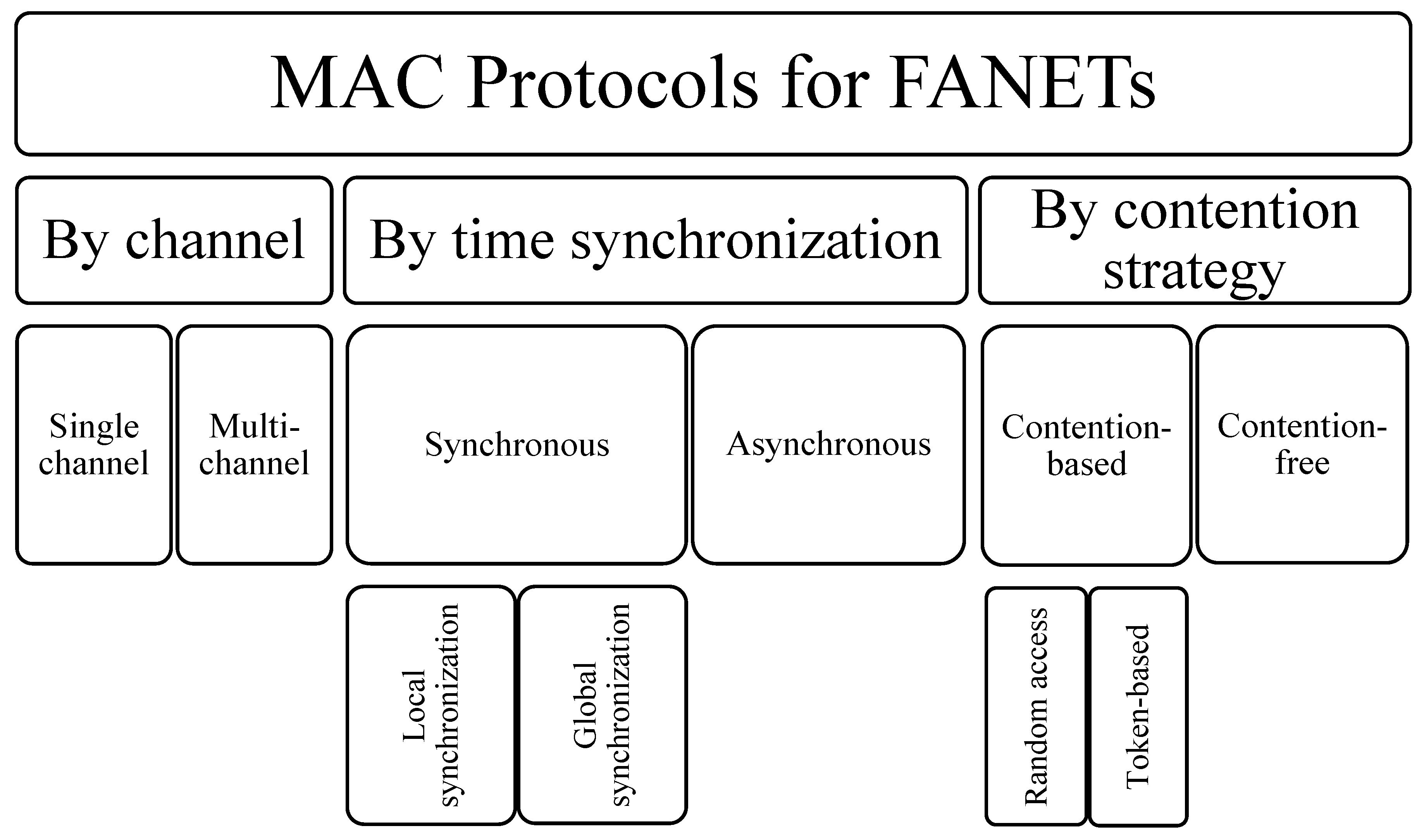
3.1.2. Medium Access Control
3.1.3. Routing
3.2. Mobility
3.2.1. Mobility Objectives
- Optimal positioning: Where to go and why.
- Optimal trajectory determination: How to get there and why.
- Optimal agent selection: Which UAVs should get there and why.
3.2.2. Mobility Models
3.3. Energy
- Reducing UAV and payload weight.
- Increasing aerodynamic efficiency.
- Improving communication protocols, or selecting them, for reduced energy consumption.
- Optimizing motion to reduce energy consumption.
4. Discussion on Findings and Open Issues
4.1. Communications
4.2. Mobility
4.3. Energy
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rappaport, T.S. The wireless revolution. IEEE Commun. Mag. 1991, 29, 52–71. Available online: https://ieeexplore.ieee.org/document/109666 (accessed on 2 September 2022). [CrossRef]
- George, T.D. Enabling the wireless revolution. In Proceedings of the 1993 International Symposium on VLSI Technology, Systems, and Applications, Taipei, Taiwan, 12–14 May 1993; p. 7. [Google Scholar]
- Gazis, V.; Görtz, M.; Huber, M.; Leonardi, A.; Mathioudakis, K.; Wiesmaier, A.; Zeiger, F.; Vasilomanolakis, E. A survey of technologies for the internet of things. In Proceedings of the 2015 International Wireless Communications and Mobile Computing Conference (IWCMC), Dubrovnik, Croatia, 24–28 August 2015; pp. 1090–1095. [Google Scholar]
- Firouzi, F.; Farahani, B.; Weinberger, M.; DePace, G.; Aliee, F.S. IoT Fundamentals: Definitions, Architectures, Challenges, and Promises. In Intelligent Internet of Things: From Device to Fog and Cloud; Firouzi, F., Chakrabarty, K., Nassif, S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 3–50. [Google Scholar]
- Ansere, J.A.; Han, G.; Liu, L.; Peng, Y.; Kamal, M. Optimal Resource Allocation in Energy-Efficient Internet-of-Things Networks with Imperfect CSI. IEEE Internet Things J. 2020, 7, 5401–5411. [Google Scholar] [CrossRef]
- Johnson, D.B. Routing in Ad Hoc Networks of Mobile Hosts. In Proceedings of the 1994 First Workshop on Mobile Computing Systems and Applications, Santa Cruz, CA, USA, 8–9 December 1994; pp. 158–163. [Google Scholar]
- Tavli, B.; Heinzelman, W. Introduction. In Mobile Ad Hoc Networks; Tavli, B., Heinzelman, W., Eds.; Springer: Dordrecht, The Netherlands, 2006; pp. 1–8. [Google Scholar]
- Čolaković, A.; Hadžialić, M. Internet of Things (IoT): A review of enabling technologies, challenges, and open research issues. Comput. Netw. 2018, 144, 17–39. Available online: https://www.sciencedirect.com/science/article/pii/S1389128618305243 (accessed on 2 September 2022). [CrossRef]
- Fraccaroli, E.; Quaglia, D. Engineering IoT Networks. In Intelligent Internet of Things: From Device to Fog and Cloud; Firouzi, F., Chakrabarty, K., Nassif, S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 97–171. [Google Scholar]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Aggarwal, S.; Nasipuri, A. Survey and Performance Study of Emerging LPWAN Technologies for IoT Applications. In Proceedings of the 2019 IEEE 16th International Conference on Smart Cities: Improving Quality of Life Using ICT & IoT and AI (HONET-ICT), Charlotte, NC, USA, 6–9 October 2019; p. 69. [Google Scholar]
- Ghazali, M.H.M.; Teoh, K.; Rahiman, W. A Systematic Review of Real-Time Deployments of UAV-Based LoRa Communication Network. IEEE Access 2021, 9, 124817–124830. [Google Scholar] [CrossRef]
- Sundaram, J.P.S.; Du, W.; Zhao, Z. A Survey on LoRa Networking: Research Problems, Current Solutions, and Open Issues. IEEE Commun. Surv. Tutor. 2020, 22, 371–388. [Google Scholar] [CrossRef]
- Centelles, R.P.; Freitag, F.; Meseguer, R.; Navarro, L. Beyond the Star of Stars: An Introduction to Multihop and Mesh for LoRa and LoRaWAN. IEEE Pervasive Comput. 2021, 20, 63–72. [Google Scholar] [CrossRef]
- Tran, H.P.; Jung, W.; Yoo, D.; Oh, H. Design and Implementation of a Multi-Hop Real-Time LoRa Protocol for Dynamic LoRa Networks. Sensors 2022, 22, 3518. [Google Scholar] [CrossRef]
- Berto, R.; Napoletano, P.; Savi, M. A LoRa-Based Mesh Network for Peer-to-Peer Long-Range Communication. Sensors 2021, 21, 4314. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, L.; Liang, J.; Chai, J.; Lei, X.; Zhang, H. High-Performance Long Range-Based Medium Access Control Layer Protocol. Electronics 2020, 9, 1273. [Google Scholar] [CrossRef]
- Macaraeg, K.C.V.G.; Hilario, C.A.G.; Ambatali, C.D.C. LoRa-based Mesh Network for Off-grid Emergency Communications. In Proceedings of the 2020 IEEE Global Humanitarian Technology Conference (GHTC), Seattle, WA, USA, 29 October–1 November 2020; pp. 1–4. [Google Scholar]
- de Farias Medeiros, D.; Villarim, M.R.; de Carvalho, F.B.S.; de Souza, C.P. Implementation and Analysis of Routing Protocols for LoRa Wireless Mesh Networks. In Proceedings of the 2020 11th IEEE Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 4–7 November 2020; p. 20. [Google Scholar]
- Chache, F.M.; Maxon, S.; Narayanan, R.M.; Bharadwaj, R. QoS Extension to a B.A.T.M.A.N. based LoRa Mesh Network. In Proceedings of the MILCOM 2021–2021 IEEE Military Communications Conference (MILCOM), San Diego, CA, USA, 29 November–2 December 2021; pp. 43–48. [Google Scholar]
- Almeida, N.C.; Rolle, R.P.; Godoy, E.P.; Ferrari, P.; Sisinni, E. Proposal of a Hybrid LoRa Mesh/LoRaWAN Network. In Proceedings of the 2020 IEEE International Workshop on Metrology for Industry 4.0 & IoT, Roma, Italy, 3–5 June 2020; pp. 702–707. [Google Scholar]
- Pham, V.D.; Kisel, V.; Kirichek, R.; Koucheryavy, A.; Shestakov, A. Evaluation of A Mesh Network based on LoRa Technology. In Proceedings of the 2022 24th International Conference on Advanced Communication Technology (ICACT), Pyeongchang, Republic of Korea, 13–16 February 2022; pp. 1280–1285. [Google Scholar]
- Lundell, D.; Hedberg, A.; Nyberg, C.; Fitzgerald, E. A Routing Protocol for LoRA Mesh Networks. In Proceedings of the 2018 IEEE 19th International Symposium on “A World of Wireless, Mobile and Multimedia Networks” (WoWMoM), Chania, Greece, 12–15 June 2018; pp. 14–19. [Google Scholar]
- Lalle, Y.; Fourati, M.; Fourati, L.C.; Barraca, J.P. Routing Strategies for LoRaWAN Multi-Hop Networks: A Survey and an SDN-Based Solution for Smart Water Grid. IEEE Access 2021, 9, 168624–168647. [Google Scholar] [CrossRef]
- Diaz Zayas, A.; Merino, P. The 3GPP NB-IoT system architecture for the Internet of Things. In Proceedings of the 2017 IEEE International Conference on Communications Workshops (ICC Workshops), Paris, France, 21–25 May 2017; pp. 277–282. [Google Scholar]
- 3GPP Releases. Available online: https://www.3gpp.org/specifications/releases (accessed on 2 September 2022).
- LoRaWAN L2 1.0.4 Specification. Available online: https://resources.lora-alliance.org/technical-specifications/ts001-1-0-4-lorawan-l2-1-0-4-specification (accessed on 26 August 2022).
- Lopez, V.H. Performance Evaluation of Long Range (LoRa) Wireless RF Technology for the Internet of Things (IoT) Using Dragino LoRa at 915 MHz. Master’s Thesis, University of North Florida, Jacksonville, FL, USA, 2020. [Google Scholar]
- Saari, M.; bin Baharudin, A.M.; Sillberg, P.; Hyrynsalmi, S.; Yan, W. LoRa—A survey of recent research trends. In Proceedings of the 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 21–25 May 2018; p. 872. [Google Scholar]
- Gkotsiopoulos, P.; Zorbas, D.; Douligeris, C. Performance Determinants in LoRa Networks: A Literature Review. IEEE Commun. Surv. Tutor. 2021, 23, 1721–1758. [Google Scholar] [CrossRef]
- AN1200.22 LoRa Modulation Basics. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1276#documentation (accessed on 2 September 2022).
- LoRa Connect. Available online: https://www.semtech.com/products/wireless-rf/lora-connect#resources (accessed on 2 September 2022).
- SX1276/77/78/79 Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1276#documentation (accessed on 2 September 2022).
- SX1272/73 Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1272#documentation (accessed on 2 September 2022).
- SX1268 Long Range, Low Power, Sub-GHz RF Transceiver Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1268#documentation (accessed on 2 September 2022).
- SX1261/2 Long Range, Low Power, Sub-GHz RF Transceiver Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1261#documentation (accessed on 2 September 2022).
- SX1280/SX1281 Datasheet. Available online: https://www.semtech.com/products/wireless-rf/lora-connect/sx1280#documentation (accessed on 16 September 2022).
- LoRaWAN Regional Parameters. Available online: https://resources.lora-alliance.org/technical-specifications/rp002-1-0-0-lorawan-regional-parameters (accessed on 27 September 2022).
- Cook, K.L.B. The Silent Force Multiplier: The History and Role of UAVs in Warfare. In Proceedings of the 2007 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2007; pp. 1–7. [Google Scholar]
- Keane, J.F.; Carr, S.S. A Brief History of Early Unmanned Aircraft. Johns Hopkins APL Tech. Dig. 2013, 32, 558–571. Available online: https://www.jhuapl.edu/TechDigest/Detail?Journal=J&VolumeID=32&IssueID=3 (accessed on 2 September 2022).
- Srivastava, A.; Prakash, J. Future FANET with application and enabling techniques: Anatomization and sustainability issues. Comput. Sci. Rev. 2021, 39, 100359. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef]
- Chriki, A.; Touati, H.; Snoussi, H.; Kamoun, F. FANET: Communication, mobility models and security issues. Comput. Netw. 2019, 163, 106877. [Google Scholar] [CrossRef]
- Bekmezci, İ.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Wang, J.; Jiang, C. Introduction of Flying Ad Hoc Networks. In Flying Ad Hoc Networks; Shen, X.S., Ed.; Springer: Singapore, 2022. [Google Scholar]
- Khan, M.A.; Safi, A.; Qureshi, I.M.; Khan, I.U. Flying ad-hoc networks (FANETs): A review of communication architectures, and routing protocols. In Proceedings of the 2017 First International Conference on Latest trends in Electrical Engineering and Computing Technologies (INTELLECT), Karachi, Pakistan, 15–16 November 2017; pp. 1–9. [Google Scholar]
- Khan, M.A.; Qureshi, I.M.; Khanzada, F. A Hybrid Communication Scheme for Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET). Drones 2019, 3, 16. [Google Scholar] [CrossRef]
- Al-Emadi, S.; Al-Mohannadi, A. Towards Enhancement of Network Communication Architectures and Routing Protocols for FANETs: A Survey. In Proceedings of the 2020 3rd International Conference on Advanced Communication Technologies and Networking (CommNet), Marrakech, Morocco, 4–6 September 2020; pp. 1–10. [Google Scholar]
- Wu, Q.; Zhang, M.; Dong, C.; Feng, Y.; Yuan, Y.; Feng, S.; Quek, T.Q.S. Routing protocol for heterogeneous FANETs with mobility prediction. ChinaComm 2022, 19, 186–201. [Google Scholar] [CrossRef]
- De Donno, M.; Tange, K.; Dragoni, N. Foundations and Evolution of Modern Computing Paradigms: Cloud, IoT, Edge, and Fog. IEEE Access 2019, 7, 150936–150948. [Google Scholar] [CrossRef]
- Gallego-Madrid, J.; Molina-Zarca, A.; Sanchez-Iborra, R.; Bernal-Bernabe, J.; Santa, J.; Ruiz, P.M.; Skarmeta-Gómez, A.F. Enhancing Extensive and Remote LoRa Deployments through MEC-Powered Drone Gateways. Sensors 2020, 20, 4109. [Google Scholar] [CrossRef] [PubMed]
- Bravo-Arrabal, J.; Toscano-Moreno, M.; Fernandez-Lozano, J.; Mandow, A.; Gomez-Ruiz, J.; García-Cerezo, A. The Internet of Cooperative Agents Architecture (X-IoCA) for Robots, Hybrid Sensor Networks, and MEC Centers in Complex Environments: A Search and Rescue Case Study. Sensors 2021, 21, 7843. [Google Scholar] [CrossRef] [PubMed]
- Lakshmi, P.; Rejith, G.; Toby, T.; Sai Shibu, N.B.; Rao, S.N. A Resilient IoT System Architecture for Disaster Management in Collapsed Buildings. In Proceedings of the 2022 International Conference on Wireless Communications Signal Processing and Networking (WiSPNET), Chennai, India, 24–26 March 2022; pp. 282–287. [Google Scholar]
- Marchese, M.; Moheddine, A.; Patrone, F. UAV and Satellite Employment for the Internet of Things Use Case. In Proceedings of the 2020 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2020; pp. 1–8. [Google Scholar]
- Sharma, R.; Arya, R. UAV based long range environment monitoring system with Industry 5.0 perspectives for smart city infrastructure. Comput Ind Eng 2022, 168, 108066. [Google Scholar] [CrossRef]
- Mujumdar, O.; Celebi, H.; Guvenc, I.; Sichitiu, M.; Hwang, S.; Kang, K. Use of LoRa for UAV Remote ID with Multi-User Interference and Different Spreading Factors. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Virtual, 25–28 April 2021; pp. 1–7. [Google Scholar]
- Delafontaine, V.; Schiano, F.; Cocco, G.; Rusu, A.; Floreano, D. Drone-aided Localization in LoRa IoT Networks. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 286–292. [Google Scholar]
- Rahman, G.M.E.; Wahid, K.A. LDAP: Lightweight Dynamic Auto-Reconfigurable Protocol in an IoT-Enabled WSN for Wide-Area Remote Monitoring. Remote Sens. 2020, 12, 3131. [Google Scholar] [CrossRef]
- Stellin, M. LoRa Networking in Mobile Scenarios Using UAV Gateways. Master’s Thesis, Instituto Superior Técnico, Lisboa, Portugal, 2018. [Google Scholar]
- Stellin, M.; Sabino, S.; Grilo, A. LoRaWAN Networking in Mobile Scenarios Using a WiFi Mesh of UAV Gateways. Electronics 2020, 9, 630. [Google Scholar] [CrossRef]
- Davoli, L.; Pagliari, E.; Ferrari, G. Hybrid LoRa-IEEE 802.11s Opportunistic Mesh Networking for Flexible UAV Swarming. Drones 2021, 5, 26. [Google Scholar] [CrossRef]
- Pan, M.; Chen, C.; Yin, X.; Huang, Z. UAV-Aided Emergency Environmental Monitoring in Infrastructure-Less Areas: LoRa Mesh Networking Approach. IEEE Internet Things J. 2022, 9, 2918–2932. [Google Scholar] [CrossRef]
- Zirak, Q.; Shashev, D.; Shidlovskiy, S. Swarm of Drones Using LoRa Flying Ad-Hoc Network. In Proceedings of the 2021 International Conference on Information Technology (ICIT), Amman, Jordan, 14–15 July 2021; pp. 400–405. [Google Scholar]
- García Algora, C.M.; Reguera, V.A.; Deligiannis, N.; Steenhaut, K. Review and Classification of Multichannel MAC Protocols for Low-Power and Lossy Networks. Access 2017, 5, 19536–19561. [Google Scholar] [CrossRef]
- Huang, P.; Xiao, L.; Soltani, S.; Mutka, M.W.; Xi, N. The Evolution of MAC Protocols in Wireless Sensor Networks: A Survey. COMST 2013, 15, 101–120. Available online: https://ieeexplore.ieee.org/document/6188353 (accessed on 2 September 2022). [CrossRef]
- Arafat, M.Y.; Poudel, S.; Moh, S. Medium Access Control Protocols for Flying Ad Hoc Networks: A Review. IEEE Sens. J. 2021, 21, 4097–4121. [Google Scholar] [CrossRef]
- Khisa, S.; Moh, S. Medium Access Control Protocols for the Internet of Things Based on Unmanned Aerial Vehicles: A Comparative Survey. Sensors 2020, 20, 5586. [Google Scholar] [CrossRef]
- Amponis, G.; Lagkas, T.; Sarigiannidis, P.; Vitsas, V.; Fouliras, P.; Wan, S. A survey on FANET routing from a cross-layer design perspective. J. Syst. Arch. 2021, 120, 102281. [Google Scholar] [CrossRef]
- Khan, M.F.; Yau, K.A.; Noor, R.M.; Imran, M.A. Routing Schemes in FANETs: A Survey. Sensors 2020, 20, 38. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Lakas, A.; Zhou, F.; Güneş, M.; Yagoubi, M.B. A survey on position-based routing protocols for Flying Ad hoc Networks (FANETs). Veh. Commun. 2017, 10, 29–56. [Google Scholar] [CrossRef]
- Pasandideh, F.; da Costa, J.P.J.; Kunst, R.; Islam, N.; Hardjawana, W.; Pignaton de Freitas, E. A Review of Flying Ad Hoc Networks: Key Characteristics, Applications, and Wireless Technologies. Remote Sens. 2022, 14, 4459. [Google Scholar] [CrossRef]
- Lansky, J.; Ali, S.; Rahmani, A.M.; Yousefpoor, M.S.; Yousefpoor, E.; Khan, F.; Hosseinzadeh, M. Reinforcement Learning-Based Routing Protocols in Flying Ad Hoc Networks (FANET): A Review. Mathematics 2022, 10, 3017. [Google Scholar] [CrossRef]
- Rovira-Sugranes, A.; Razi, A.; Afghah, F.; Chakareski, J. A review of AI-enabled routing protocols for UAV networks: Trends, challenges, and future outlook. Ad Hoc Netw. 2022, 130, 102790. [Google Scholar] [CrossRef]
- Wheeb, A.H.; Nordin, R.; Samah, A.A.; Alsharif, M.H.; Khan, M.A. Topology-Based Routing Protocols and Mobility Models for Flying Ad Hoc Networks: A Contemporary Review and Future Research Directions. Drones 2022, 6, 9. [Google Scholar] [CrossRef]
- Bautista, O.; Akkaya, K.; Uluagac, A.S. Customized novel routing metrics for wireless mesh-based swarm-of-drones applications. Internet Things 2020, 11, 100265. [Google Scholar] [CrossRef]
- Kumari, K.; Sah, B.; Maakar, S. A survey: Different mobility model for FANET. Int. J. Adv. Res. Comput. Sci. Softw. Eng. 2015, 5, 1170–1173. [Google Scholar]
- Esrafilian, O.; Gangula, R.; Gesbert, D. Autonomous UAV-aided Mesh Wireless Networks. In Proceedings of the IEEE INFOCOM 2020—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Toronto, ON, Canada, 6–9 July 2020; pp. 634–640. [Google Scholar]
- Jacewicz, M.; Żugaj, M.; Głębocki, R.; Bibik, P. Quadrotor Model for Energy Consumption Analysis. Energies 2022, 15, 7136. [Google Scholar] [CrossRef]
- Chowdhuri, S.; Banerjee, S.; Chaudhuri, S.S. Implementation of a novel Minimum Energy Consume Secure Routing Protocol for reliable and energy efficient rescue operation of FANET. In Proceedings of the 2018 IEEE Applied Signal Processing Conference (ASPCON), Kolkata, India, 7–9 December 2018; pp. 129–133. [Google Scholar]
- Ayub, M.S.; Adasme, P.; Carrillo Melgarejo, D.; Lopes Rosa, R.; Zegarra Rodríguez, D. Intelligent Hello Dissemination Model for FANET Routing Protocols. IEEE Access 2022, 10, 46513–46525. [Google Scholar] [CrossRef]
- Khan, I.U.; Qureshi, I.M.; Aziz, M.A.; Cheema, T.A.; Shah, S.B.H. Smart IoT Control-Based Nature Inspired Energy Efficient Routing Protocol for Flying Ad Hoc Network (FANET). IEEE Access 2020, 8, 56371–56378. [Google Scholar] [CrossRef]
- Mansour, H.S.; Mutar, M.H.; Aziz, I.A.; Mostafa, S.A.; Mahdin, H.; Abbas, A.H.; Hassan, M.H.; Abdulsattar, N.F.; Jubair, M.A. Cross-Layer and Energy-Aware AODV Routing Protocol for Flying Ad-Hoc Networks. Sustainability 2022, 14, 8980. [Google Scholar] [CrossRef]
- Cheriguene, Y.; Djellikh, S.; Bousbaa, F.Z.; Lagraa, N.; Lakas, A.; Kerrache, C.A.; Karim Tahari, A.E. SEMRP: An Energy-Efficient Multicast Routing Protocol for UAV Swarms. In Proceedings of the IEEE/ACM 24th International Symposium on Distributed Simulation and Real Time Applications, Prague, Czech Republic, 14–16 September 2020; pp. 182–189. [Google Scholar]
- Mahmud, I.; Cho, Y.-Z. Adaptive Hello Interval in FANET Routing Protocols for Green UAVs. IEEE Access 2019, 7, 63004–63015. [Google Scholar] [CrossRef]
- Namdev, M.; Goyal, S.; Agarwal, R. An Optimized Communication Scheme for Energy Efficient and Secure Flying Ad-hoc Network (FANET). Wirel. Pers. Commun. 2021, 120, 1291–1312. [Google Scholar] [CrossRef]
- Tiurlikova, A.; Stepanov, N.; Mikhaylov, K. Improving the Energy Efficiency of a LoRaWAN by a UAV-based Gateway. In Proceedings of the 2019 11th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Dublin, Ireland, 28–30 October 2019; pp. 1–6. [Google Scholar]
- Moysiadis, V.; Lagkas, T.; Argyriou, V.; Sarigiannidis, A.; Moscholios, I.D.; Sarigiannidis, P. Extending ADR mechanism for LoRa enabled mobile end-devices. Simul. Model. Pract. Theory 2021, 113, 102388. [Google Scholar] [CrossRef]
- Choi, D.H.; Kim, S.H.; Sung, D.K. Energy-efficient maneuvering and communication of a single UAV-based relay. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2320–2327. [Google Scholar] [CrossRef]
- TP-LINK AC750 Wi-Fi Travel Router Model TL-WR902AC Datasheet. Available online: https://static.tp-link.com/2020/202010/20201019/TL-WR902AC(EU&US)3.0_Datasheet.pdf (accessed on 5 December 2022).
- HOPERF RFM95W/96W/98W Datasheet V2.0. Available online: https://www.hoperf.com/modules/lora/RFM95.html (accessed on 5 December 2022).
- Raspberry Pi 4 Computer Model B Product Brief. Available online: https://datasheets.raspberrypi.com/rpi4/raspberry-pi-4-product-brief.pdf (accessed on 5 December 2022).
- PARROT ANAFI USA Technical Specifications V1.5.3. Available online: https://www.parrot.com/assets/s3fs-public/2022-01/white-paper-anafi-usa-v1.5.3_en.pdf (accessed on 5 December 2022).
- Ji, B.; Li, Y.; Zhou, B.; Li, C.; Song, K.; Wen, H. Performance Analysis of UAV Relay Assisted IoT Communication Network Enhanced With Energy Harvesting. IEEE Access 2019, 7, 38738–38747. [Google Scholar] [CrossRef]
- Yang, Z.; Xu, W.; Shikh-Bahaei, M. Energy Efficient UAV Communication with Energy Harvesting. IEEE Trans. Veh. Technol. 2020, 69, 1913–1927. [Google Scholar] [CrossRef]
- Citroni, R.; Di Paolo, F.; Livreri, P. A Novel Energy Harvester for Powering Small UAVs: Performance Analysis, Model Validation and Flight Results. Sensors 2019, 19, 1771. [Google Scholar] [CrossRef]
- Ayoub, W.; Samhat, A.E.; Nouvel, F.; Mroue, M.; Prevotet, J. Internet of Mobile Things: Overview of LoRaWAN, DASH7, and NB-IoT in LPWANs Standards and Supported Mobility. IEEE Commun. Surv. Tutor. 2019, 21, 1561–1581. [Google Scholar] [CrossRef]
- SARA-N2 Series Datasheet. Available online: https://content.u-blox.com/sites/default/files/SARA-N2_ProductSummary_(UBX-16014015).pdf (accessed on 5 December 2022).
- Ameloot, T.; Moeneclaey, M.; Van Torre, P.; Rogier, H. Characterizing the Impact of Doppler Effects on Body-Centric LoRa Links with SDR. Sensors 2021, 21, 4049. [Google Scholar] [CrossRef]







| No. | Keywords |
|---|---|
| 1. | “LoRa” AND “FANET” |
| 2. | “FANET” AND “Communications” |
| 3. | “FANET” AND “Mobility” |
| 4. | “FANET” AND “Energy” |
| 5. | “LoRa” AND “UAV” AND “Communications” |
| 6. | “LoRa” AND “UAV” AND “Architecture” |
| 7. | “LoRa” AND “UAV” AND (“Medium Access Control” OR “MAC” OR “Mesh”) |
| 8. | “LoRa” AND “UAV” AND “Routing” |
| 9. | “LoRa” AND “UAV” AND “Mobility” |
| 10. | “LoRa” AND “UAV” AND “Energy” |
| Challenge | Topic |
|---|---|
| Communications |
|
| Mobility |
|
| Energy |
|
| By Wing Type | By Size | By Type of Flight | By Flight Range | By Energy Autonomy | By Altitude | By Purpose | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Fixed wing [41,42,43] | Rotary wing [41,42,43] | Hybrid [41] | Large [42,43] | Small [42,43] | Autonomous [42] | Remotely controlled [42] | Close-range [43] | Short-range [43] | Mid-range [43] | Long-range | High [42] | Medium [42] | Low [42] | High [42] | Medium [42] | Low [42] | Military [41] | Communications [41,42] | Surveillance [41] | Photography/Mapping [41,43] | Exploration/Surveying [41] | Remote sensing [41] | Delivery [43] | First-Person View (FPV)/Entertainment |
| Reference | Topology | Communication Technology | IoT Architecture | UAV Type | Application | Test | ||
|---|---|---|---|---|---|---|---|---|
| Air-to-Ground | Air-to-Air | Air-to-Satellite | ||||||
| [51] | Single UAV | LoRaWAN (access) 4G/Wi-Fi (backbone) | --- | --- | Edge | Rotary wing | Agricultural monitoring | Single UAV-to-Ground proof of concept |
| [52] | Single UAV | LoRaWAN/Bluetooth (both as access) Wi-Fi (backbone) | --- | --- | Edge | Rotary wing | Search and rescue | Single UAV-to-Ground proof of concept |
| [53] | Single UAV | LoRaWAN (access/backbone) | --- | --- | Fog | Rotary wing | Disaster monitoring | Single UAV-to-Ground proof of concept |
| [54] | Single UAV | LoRaWAN (access) | --- | Simulation through delay (backbone) | Cloud | Rotary wing | Sensor monitoring | Single UAV-to-Ground proof of concept |
| [55] | Single UAV | LoRaWAN (access) Wi-Fi (backbone) | --- | --- | Cloud | Rotary wing | Environmental monitoring | Single UAV-to-Ground proof of concept |
| [56] | Single UAV | LoRa (access) | --- | --- | Cloud | --- | UAV remote identification | Single UAV-to-Ground simulation |
| [57] | Multiple independent UAVs | LoRaWAN (access) | --- | --- | Cloud | Rotary wing | Search and rescue, asset localization | Single UAV-to-Ground experiments |
| [58] | Single UAV | LoRa (access) | --- | --- | Cloud | Rotary wing | Sensor monitoring | Single UAV-to-Ground experiments |
| [59,60] | Single cluster | LoRaWAN (access) 802.11 g (backbone) | 802.11 g (backhaul) | --- | Cloud | Rotary wing | Emergency response | Simulation |
| [61] | 3D multi-layer | 802.11 s/LoRaWAN (both as access/backbone) | 802.11 s/LoRa (backhaul) | --- | Edge, fog, cloud | Rotary wing | Surveillance, agriculture, flight telemetry | Single UAV-to-Ground proof of concept |
| [62] | Single cluster | LoRa (access/backbone) | LoRa (backhaul) | --- | Cloud | Rotary wing | Environmental emergencies | Single UAV two-hop proof of concept |
| [63] | Single cluster | LoRa (access/backbone) | LoRa (backhaul) | --- | Cloud | Rotary wing | Open | Three UAVs two-hop proof of concept |
| Reference | Topology | Link Type | Communication Technology | Proposed MAC Protocol |
|---|---|---|---|---|
| [59,60] | Single cluster | Air-to-air | 802.11 g (backhaul) | CSMA/CA |
| Air-to-ground | LoRaWAN (access) | ALOHA | ||
| 802.11 g (backbone) | CSMA/CA | |||
| [61] | 3D multi-layer | Air-to-air | 802.11 s (backhaul) | CSMA/CA |
| LoRa (backhaul) | TDMA | |||
| Air-to-ground | 802.11 s (as access/backbone) | CSMA/CA | ||
| LoRaWAN (as access/backbone) | ALOHA | |||
| [62] | Single cluster | Air-to-air | LoRa (backhaul) | Custom slotted ALOHA |
| Air-to-ground | LoRa (access/backbone) | Custom slotted ALOHA | ||
| [63] | Single cluster | Air-to-air | LoRa (backhaul) | CSMA/CA |
| Air-to-ground | LoRa (access/backbone) | CSMA/CA |
| Reference | Topology | Link Type | Communication Technology | Proposed Routing Protocol |
|---|---|---|---|---|
| [59,60] | Single cluster | Air-to-Air | 802.11 g (backhaul) | OLSR |
| Air-to-Ground | LoRaWAN (access) | --- | ||
| 802.11 g (backbone) | OLSR | |||
| [61] | 3D multi-layer | Air-to-Air | 802.11 s (backhaul) | HWMP |
| LoRa (backhaul) | Not defined | |||
| Air-to-Ground | 802.11 s (as access/backbone) | HWMP | ||
| LoRaWAN (as access/backbone) | --- | |||
| [62] | Single cluster | Air-to-Air | LoRa (backhaul) | GPS-based directed flooding |
| Air-to-Ground | LoRa (access/backbone) | Not required | ||
| [63] | Single cluster | Air-to-Air | LoRa (backhaul) | Custom DSDV |
| Air-to-Ground | LoRa (access/backbone) | Custom DSDV |
| Component | Current [mA] | Voltage [V] | Power [W] | Energy for a 30-min Flight [J] | % of Energy Consumption |
|---|---|---|---|---|---|
| Wi-Fi transmitter (802.11 n at 20 dBm, 2.4 GHz [89]) | 2000 | 5 | 10 | 18,000 | 4.83% |
| LoRa transmitter (RFM95 W at 20 dBm, 915 MHz [90]) | 120 | 3.7 | 0.32 | 799 | 0.21% |
| Communications controller (Raspberry Pi 4 B [91]) | 2500 | 5 | 12.5 | 22,500 | 6.04% |
| UAV (Parrot Anafi USA [92]) | --- | --- | 4 × 46 | 331,200 | 88.91% |
| TOTAL | --- | --- | 125.1 | 372,499 | 100.00% |
| Aspect | LoRa/LoRaWAN | Wi-Fi | Cellular-Based LPWAN (NB-IoT) |
|---|---|---|---|
| Range [10,96] | 2–5 km in urban areas and 15 km in suburban areas | Up to 100 m | 0–1 km in urban areas and up to 15 km in suburban areas |
| Throughput [25,31,96] | Less than 200 kbps | Up to hundreds of Mbps | Up to 1 Mbps |
| Frequency bands | ISM (unlicensed) | ISM (unlicensed) | International Mobile Telecommunications (IMT) (licensed) |
| Energy consumption [J] * | ~800 | ~18,000 | ~1500 [97] |
| Requires service provider infrastructure | No | No | Yes |
| Includes protocols for mesh networking | No | Yes | It does not require them as it relies on infrastructure |
| Aspect | Advantages | Disadvantages |
|---|---|---|
| Communications |
|
|
| Mobility [98] |
|
|
| Energy |
|
|
| Link | Advantages | Disadvantages |
|---|---|---|
| Air-to-air |
|
|
| Air-to-ground |
|
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Paredes, W.D.; Kaushal, H.; Vakilinia, I.; Prodanoff, Z. LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues. Sensors 2023, 23, 2403. https://doi.org/10.3390/s23052403
Paredes WD, Kaushal H, Vakilinia I, Prodanoff Z. LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues. Sensors. 2023; 23(5):2403. https://doi.org/10.3390/s23052403
Chicago/Turabian StyleParedes, William David, Hemani Kaushal, Iman Vakilinia, and Zornitza Prodanoff. 2023. "LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues" Sensors 23, no. 5: 2403. https://doi.org/10.3390/s23052403
APA StyleParedes, W. D., Kaushal, H., Vakilinia, I., & Prodanoff, Z. (2023). LoRa Technology in Flying Ad Hoc Networks: A Survey of Challenges and Open Issues. Sensors, 23(5), 2403. https://doi.org/10.3390/s23052403