
Event-Triggered Kalman Filter and Its Performance Analysis


Abstract
1. Introduction
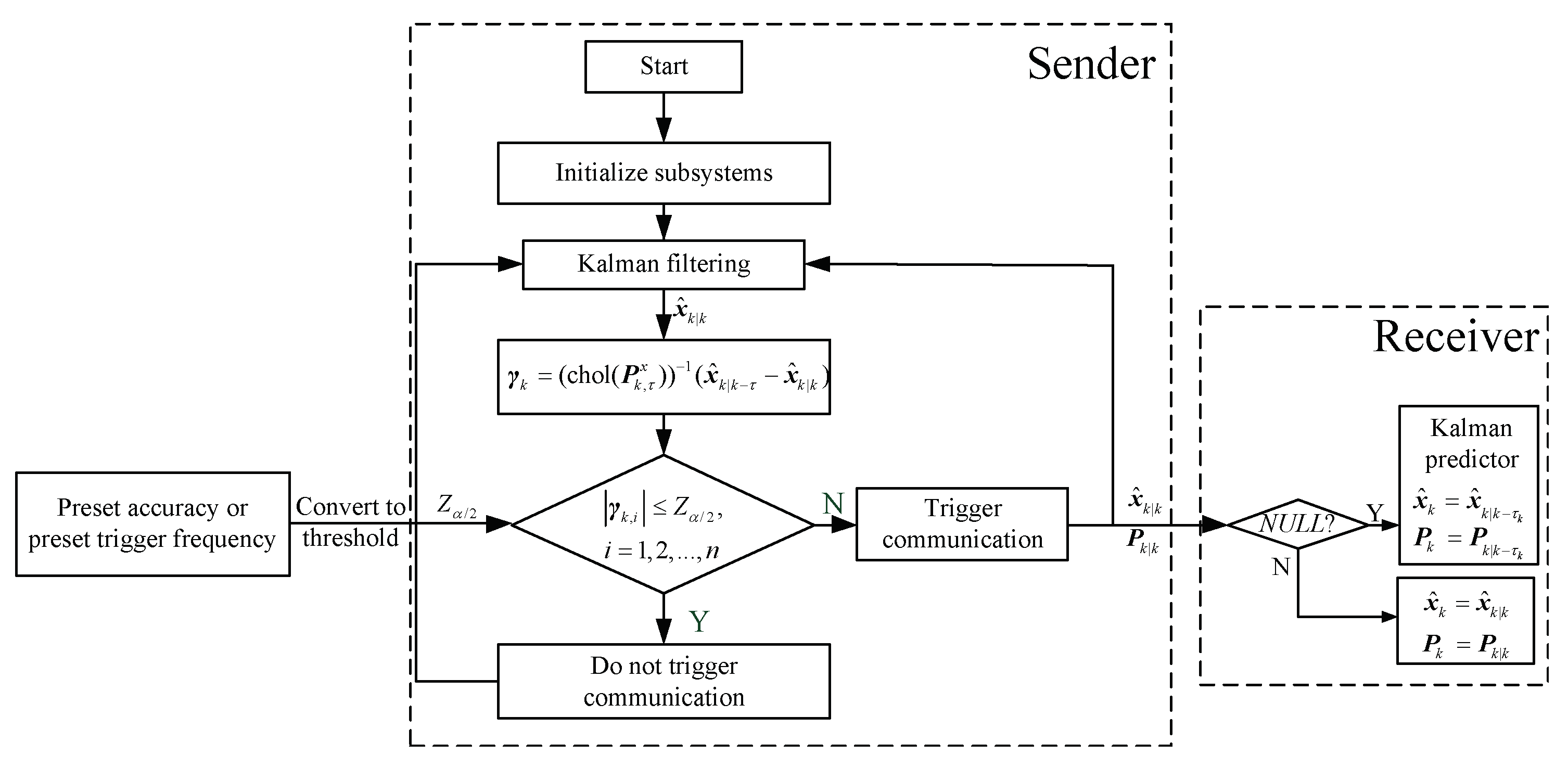
- For wireless sensors, an event-triggered mechanism is proposed. The proposed event-triggered mechanism is based on a normal distribution constructed from the predicted and filtered differences. When the constructed normal distribution trigger function exceeds a tolerable threshold, the filtering results are transmitted.
- The theoretical trigger probability and estimation accuracy under the proposed trigger mechanism are derived. For linear time-invariant systems, the Riccati equation can be used to obtain the estimation error variance of the event-triggered estimator. For linear time-varying systems without steady-state estimation, an approximate estimation accuracy can be obtained. Therefore, their trigger threshold can be set according to the precision requirements.
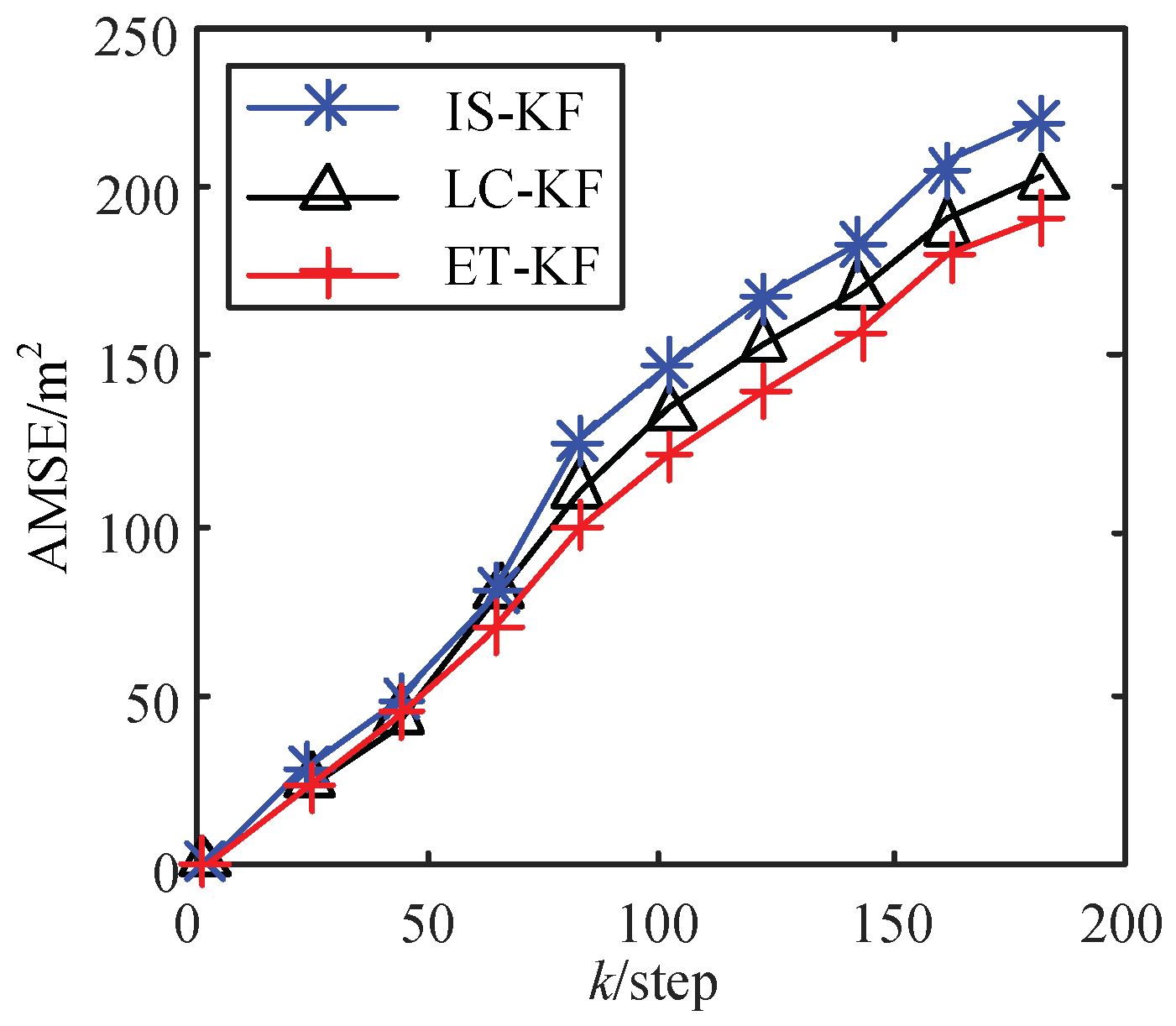
- The simulation verifies the correctness of the proposed theorems and inferences. Compared with several types of event trigger mechanisms in the existing literature [14,22], the trigger mechanism proposed in this paper has higher estimation accuracy and better performance under the same trigger rate.
2. Problem Formulation
2.1. Threshold Selection of Event-Triggered Mechanism
| Algorithm 1: Solution steps for |
| Initialize: |
| Iterate: |
| for |
| end |
| if |
| else |
| else |
| for |
| for |
| for |
| end |
| end |
| end |
| end |
- (1)
- The proof of the mean value of . Since and are unbiased,
- (2)
- The proof of the in Equation (12). Based on the Kalman filter:estimated error variance matrix is computed by:From Equations (17) and (18), can be written as:since is white noise and independent of , , , in Equation (19) are respectively calculated as:From Equations (20)–(22), the solution rules can be summarized as Equation (15). Similarly, is defined by:In summary, the error variance matrix in Equation (18) can be calculated as Equation (12).
- (3)
- The proof of in Equation (14), from Equation (1):since is white noise and independent of , the Equation (11) is yielded. Based on , Equation (11) and Equation (24), the Equation (14) is yielded. The remaining equations are easily obtained by the Kalman filter and prediction. □
2.2. Kalman Filter Algorithm Based on Event-Triggered Mechanism
3. Performance Analysis of the ET-KF
4. Simulation Examples
- Scenario 1.(Event-triggered steady-state Kalman filter.) Consider the following planar tracking system:
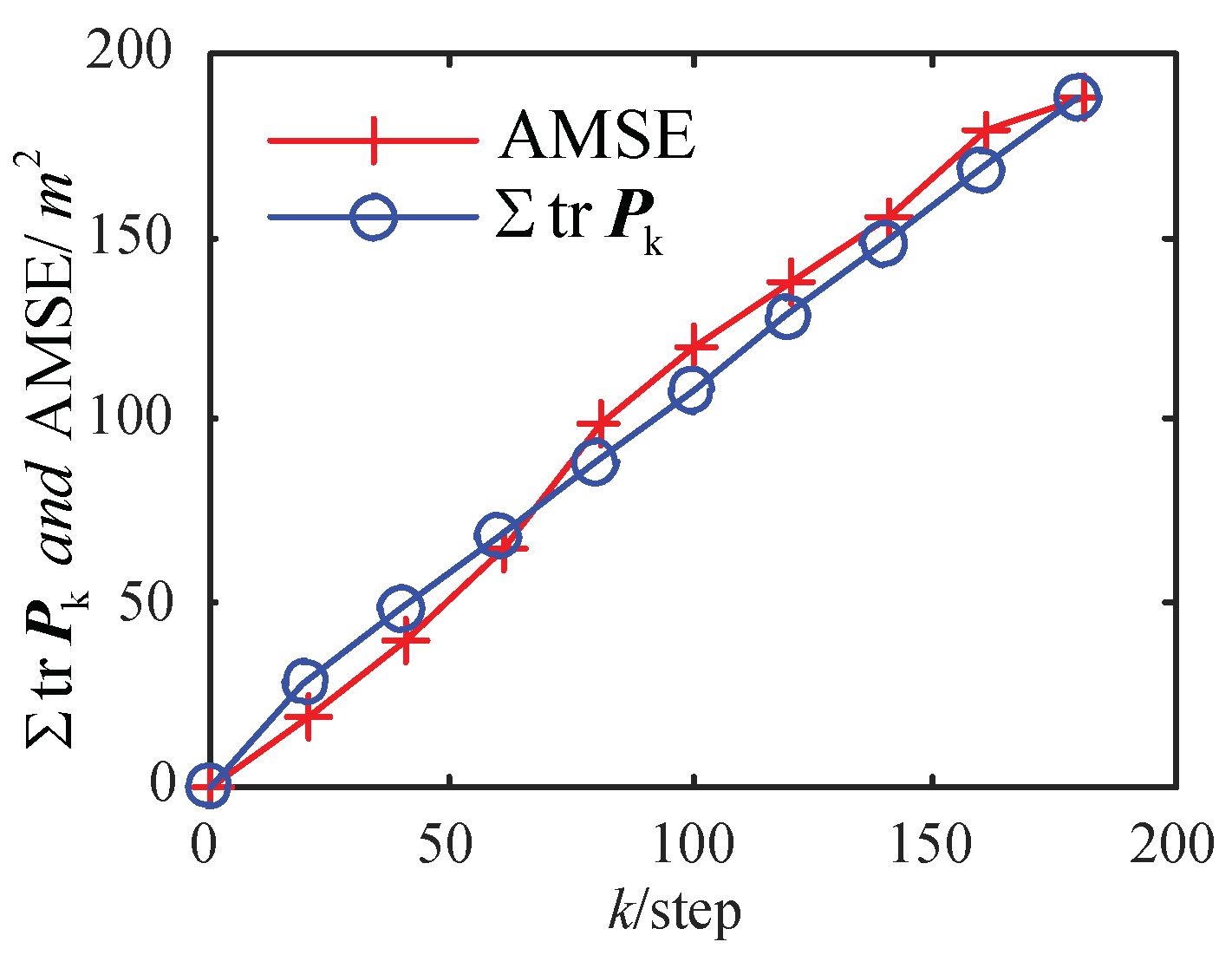
- and is the diagonal element in the error covariance matrix of the ET-KF, and is the element of for the ET-KF.
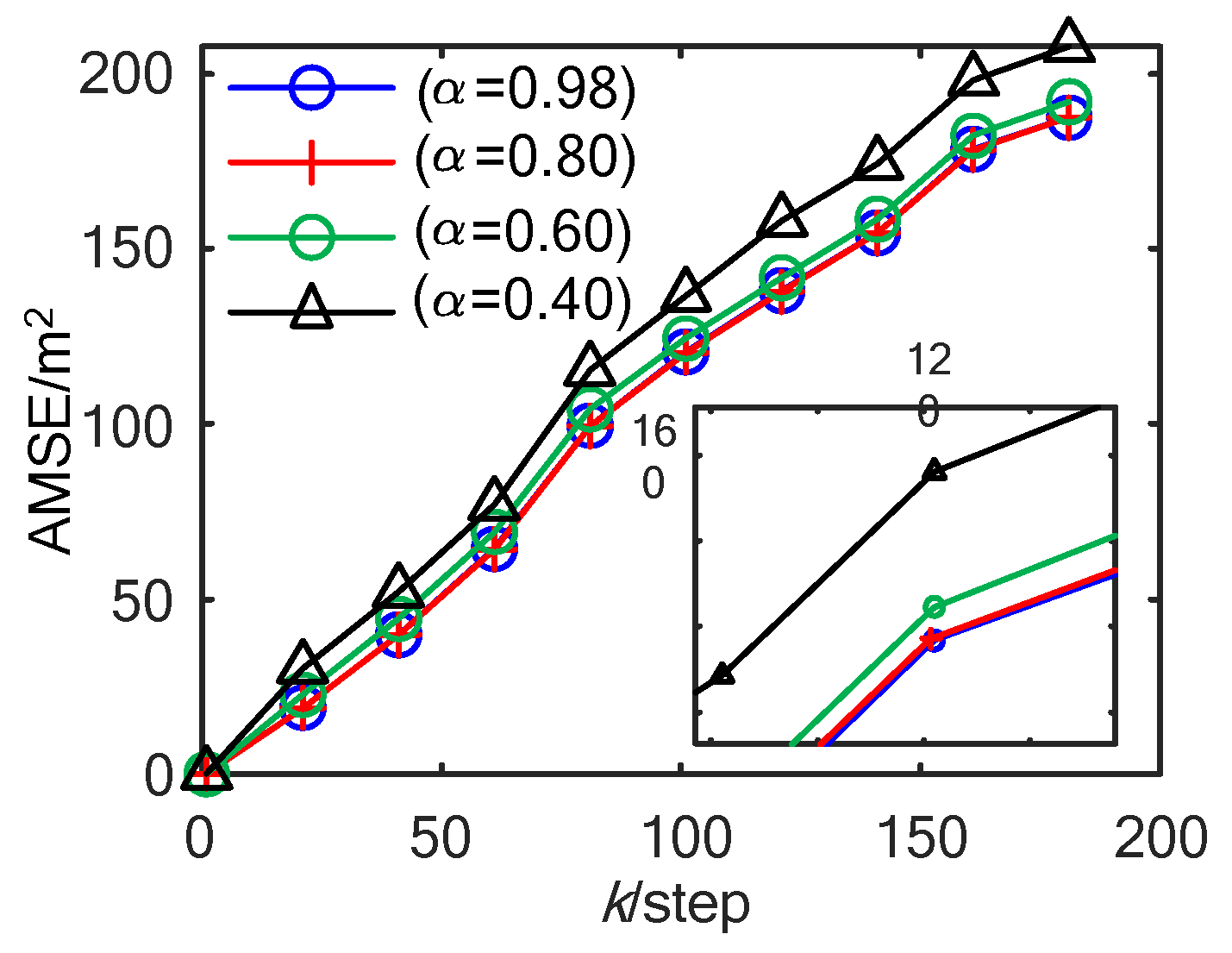
- Scenario 2. (Event-triggered time-varying Kalman filter.) Consider the planar tracking system in Equation (44) and Equation (45), where is the initial state, is processing noise variance, is measurement noise variance. The performance of the system is measured by the accumulated mean square error (AMSE) [27,28,29]:
5. Conclusions
- The event-triggered statistic is constructed, which proves that the statistic obeys the standard Gaussian distribution, according to the event-triggered statistic and hypothesis test of the Gaussian distribution, the significance of the event-triggered threshold is given, and then an event-triggered estimation mechanism is designed.
- Based on the event-triggered threshold and mechanism proposed in this paper, the theoretical trigger frequency under different thresholds and the estimation accuracy of event-triggered systems are analyzed. The proposed ET-KF can accurately set the event trigger frequency in advance. For linear systems with steady-state estimation, the estimation accuracy can be obtained by the Riccati equation accurately, and the trigger threshold can be set according to the accuracy. For linear time-varying systems without steady-state estimation, the approximate estimation accuracy can be obtained.
- The proposed trigger mechanism has higher estimation accuracy at the same trigger rate, and the trigger setting is reasonable.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wei, W.; Song, H.; Li, W.; Shen, P.; Vasilakos, A. Gradient-driven parking navigation using a continuous information potential field based on wireless sensor network. Inf. Sci. 2017, 408, 100–114. [Google Scholar] [CrossRef]
- Elamin, A.; Abdelaziz, N.; El-Rabbany, A. A GNSS/INS/LiDAR Integration Scheme for UAV-Based Navigation in GNSS-Challen. Sensors 2022, 22, 9908. [Google Scholar] [CrossRef]
- Zhang, C.; Qin, J.; Li, H.; Wang, Y.; Wang, S.; Zheng, W.X. Consensus-based distributed two-target tracking over wireless sensor networks. Automatica 2022, 146, 110593. [Google Scholar] [CrossRef]
- Lu, Y.; Li, B.; Karimi, H.R.; Zhang, N. Measurement outlier-Resistant target tracking in wireless sensor networks with energy harvesting constraints. J. Frankl. Inst. 2022; in press. [Google Scholar] [CrossRef]
- Marsh, B.; Sadka, A.H.; Bahai, H. A Critical Review of Deep Learning-Based Multi-Sensor Fusion Techniques. Sensors 2022, 22, 9364. [Google Scholar] [CrossRef]
- GHorbani, S.; Safavi, A.A.; Naghavi, S.V. Decentralized event-triggered robust MPC for large-scale networked Lipchitz non-linear control systems. IET Control Theory Appl. 2021, 15, 2316–2333. [Google Scholar] [CrossRef]
- Ma, C.; Zheng, S.; Xu, T.; Ji, Y. Finite-Time Asynchronous Event-Triggered Formation of UAVs with Semi-Markov-Type Topologies. Sensors 2022, 22, 4529. [Google Scholar] [CrossRef]
- Yang, X.; Wang, H.; Zhu, Q. Event-triggered predictive control of nonlinear stochastic systems with output delay. Automatica 2022, 140, 110230. [Google Scholar] [CrossRef]
- Chen, W.; Shi, D.; Wang, J.; Shi, L. Event-triggered state estimation: Experimental performance assessment and comparative study. IEEE Trans. Control. Syst. Technol. 2016, 25, 1865–1872. [Google Scholar] [CrossRef]
- Shoukry, Y.; Tabuada, P. Event-triggered state observers for sparse sensor noise/attacks. IEEE Trans. Autom. Control 2015, 61, 2079–2091. [Google Scholar] [CrossRef]
- Ho, Y.C.; Cao, X.; Cassandras, C. Infinitesimal and finite perturbation analysis for queueing networks. Automatica 1983, 19, 439–445. [Google Scholar] [CrossRef]
- Miskowicz, M. Send-on-delta concept: An event-based data reporting strategy. Sensors 2006, 6, 49–63. [Google Scholar] [CrossRef]
- Trimpe, S.; D’Andrea, R. Event-based state estimation with variance-based trigger. IEEE Trans. Autom. Control 2014, 59, 3266–3281. [Google Scholar] [CrossRef]
- Wang, N.; Sun, S. Event-triggered sequential fusion filters based on estimators of observation noises for multi-sensor systems with correlated noises. Digit. Signal Process. 2021, 111, 102960. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. Event-based H∞ filtering for sampled-data systems. Automatica 2015, 51, 55–69. [Google Scholar] [CrossRef]
- Sun, Y.C.; Yang, G.H. Event-triggered remote state estimation for cyber-physical systems under malicious DoS attacks. Inf. Sci. 2022, 602, 43–56. [Google Scholar] [CrossRef]
- Liu, C.; Sun, S. Event-triggered optimal and suboptimal distributed Kalman consensus filters for sensor networks. J. Franklin. Inst. 2021, 358, 5163–5183. [Google Scholar] [CrossRef]
- Zhong, X.; He, H. An event-triggered ADP control approach for continuous-time system with unknown internal states. IEEE Trans. Cybern. 2016, 47, 683–694. [Google Scholar] [CrossRef]
- Chen, Z.; Niu, B.; Zhao, X.; Zhang, L.; Xu, N. Model-based adaptive event-triggered control of nonlinear continuous-time systems. Appl. Math. Comput. 2021, 408, 126330. [Google Scholar] [CrossRef]
- Hu, S.; Qiu, J.; Chen, X.; Zhao, F.; Jiang, X. Dynamic event-triggered control for leader-following consensus of multiagent systems with the estimator. IET Control Theory Appl. 2022, 16, 475–484. [Google Scholar] [CrossRef]
- Zhu, X.; Zhang, X.; Wei, J.; Du, H.; Xi, J. Dynamic event-triggered control of networked control systems with uncertainty and transmission delay. J. Franklin. Inst. 2022, 359, 477–491. [Google Scholar] [CrossRef]
- Long, J.; Wang, W.; Wen, C.; Huang, J.; Lü, J. Output feedback based adaptive consensus tracking for uncertain heterogeneous multi-agent systems with event-triggered communication. Automatica 2022, 136, 110049. [Google Scholar] [CrossRef]
- Gao, G.; Gao, B.; Gao, S.; Hu, G.; Zhong, Y. A Hypothesis Test-Constrained Robust Kalman Filter for INS/GNSS Integration with Abnormal Measurement. IEEE Trans. Veh. Technol. 2022; early access. [Google Scholar] [CrossRef]
- Gao, G.; Zhong, Y.; Gao, S.; Gao, B. Double-channel sequential probability ratio test for failure detection in multisensor integrated systems. IEEE Trans. Instrum. Meas. 2021, 70, 1–14. [Google Scholar] [CrossRef]
- Zhong, M.; Ding, S.X.; Han, Q.L.; He, X.; Zhou, D. A Krein space-based approach to event-triggered H∞ filtering for linear discrete time-varying systems. Automatica 2022, 135, 110001. [Google Scholar] [CrossRef]
- Cacace, F.; Conte, F.; d’Angelo, M.; Germani, A.; Palombo, G. Filtering linear systems with large time-varying measurement delays. Automatica 2022, 136, 110084. [Google Scholar] [CrossRef]
- Zhao, H.; Tian, B.; Chen, B. Robust stable iterated unscented Kalman filter based on maximum correntropy criterion. Automatica 2022, 142, 110410. [Google Scholar] [CrossRef]
- Gao, S.; Zhong, Y.; Li, W. Robust adaptive filtering method for SINS/SAR integrated navigation system. Aerosp. Sci. Technol. 2011, 15, 425–430. [Google Scholar] [CrossRef]
- Zhu, X.; Gao, B.; Zhong, Y.; Gu, C.; Choi, K.S. Extended Kalman filter for online soft tissue characterization based on Hunt-Crossley contact model. J. Mech. Behav. Biomed. Mater. 2021, 123, 104667. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.98 | 0.8 | 0.6 | 0.4 | |
|---|---|---|---|---|
| Threshold | 0.05 | 0.25 | 0.52 | 0.84 |
| Theoretical trigger probability | 0.9996 | 0.96 | 0.84 | 0.64 |
| Actual trigger frequency | 99.5% | 96% | 83.5% | 63% |
| 0.1795 | 0.1790 | 0.1450 | 0.1544 | 0.1795 | 0.1816 | 0.1450 | 0.1345 | |
| 0.1848 | 0.1792 | 0.1450 | 0.1548 | 0.1848 | 0.1807 | 0.1450 | 0.1342 | |
| 0.2084 | 0.1835 | 0.1450 | 0.1594 | 0.2084 | 0.1849 | 0.1450 | 0.1365 | |
| 0.2614 | 0.1988 | 0.1450 | 0.1662 | 0.2614 | 0.1850 | 0.1450 | 0.1362 |
| 0.98 | 0.8 | 0.6 | 0.4 | |
|---|---|---|---|---|
| Threshold | 0.05 | 0.25 | 0.52 | 0.84 |
| Theoretical trigger probability | 0.9996 | 0.96 | 0.84 | 0.64 |
| Actual trigger frequency | 99.5% | 95.5% | 82% | 65% |
| Different Trigger Threshold Algorithms | Trigger Frequency | |
|---|---|---|
| ET-KF | 198 | 80% |
| IS-KF | 225 | 80% |
| LC-KF | 210 | 80% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Hao, G. Event-Triggered Kalman Filter and Its Performance Analysis. Sensors 2023, 23, 2202. https://doi.org/10.3390/s23042202
Li X, Hao G. Event-Triggered Kalman Filter and Its Performance Analysis. Sensors. 2023; 23(4):2202. https://doi.org/10.3390/s23042202
Chicago/Turabian StyleLi, Xiaona, and Gang Hao. 2023. "Event-Triggered Kalman Filter and Its Performance Analysis" Sensors 23, no. 4: 2202. https://doi.org/10.3390/s23042202
APA StyleLi, X., & Hao, G. (2023). Event-Triggered Kalman Filter and Its Performance Analysis. Sensors, 23(4), 2202. https://doi.org/10.3390/s23042202